Изобретение касается способа анализа изображений на базе колеи в железнодорожном сообщении, в частности для анализа изображений на базе рельсового пути в рельсовом сообщении согласно ограничительной части п.1 формулы изобретения, устройства для анализа изображений на базе колеи в железнодорожном сообщении, в частности для анализа изображений на базе рельсового пути в рельсовом сообщении согласно ограничительной части п.11 формулы изобретения и железнодорожного транспортного средства для анализа изображений на базе колеи в железнодорожном сообщении, в частности рельсового транспортного средства для анализа изображений на базе рельсового пути в рельсовом сообщении согласно ограничительной части п.26 формулы изобретения.
Железнодорожные транспортные средства, как составная часть современной транспортной инфраструктуры, представляют собой колейные средства сообщения и транспорта, которые передвигаются, например, катясь по или под одним или двумя направляющими рельсами (рельсовыми путями), паря над или под магнитным полем или вися на стальных тросах. Из названных колейных средств сообщении и транспорта наиболее широко распространены рельсовые транспортные средства, которые базируются на колесно-рельсовой системе, которые либо (имеют) собственный привод ходовой части (моторвагон), либо тянутся или перемещаются локомотивом, и у которых преимущественно стальные колеса, имеющие гребень бандажа, направляются по двум стальным рельсам или, соответственно, рельсовым путям.
Лежащая в основе изобретения задача заключается в том, чтобы предложить способ, устройство и железнодорожное транспортное средство, в частности рельсовое транспортное средство, для анализа изображений на базе колеи в железнодорожном сообщении, в частности для анализа изображений на базе рельсового пути в рельсовом сообщении, с помощью которого улучшается автоматизированное (автономное) или с участием машиниста ведение железнодорожных транспортных средств или, соответственно, рельсовых транспортных средств без дополнительной инфраструктуры по некоторому перегону следования.
Выполнение анализа изображений на базе колеи в железнодорожном сообщении, в частности анализа изображений на базе рельсового пути в рельсовом сообщении, что является предметом настоящей международной заявки на патент (заявка № PCT/…; публикация № WO…) и обосновывающей ее приоритет заявки на патент DE (заявка №102016224331.4), с учетом будущего автоматизированного (автономного) или с участием машиниста ведения железнодорожных транспортных средств в железнодорожном сообщении или, соответственно, рельсовых транспортных средств в рельсовом сообщении является целесообразным улучшением для упомянутой преследуемой цели.
Так, для автоматизированного или с участием машиниста ведения железнодорожных/рельсовых транспортных средств без дополнительной инфраструктуры по некоторому перегону необходимо автоматизированным образом аналитически оценивать изображения с транспортного средства, в частности из перспективы машиниста моторвагона. Эти изображения могут получаться от по меньшей мере одного прибора для записи изображений, но предпочтительно нескольких приборов, напр., видеокамер, лазерных сенсоров, радарных устройств, тепловых камер для съемки изображений или других приборов для сбора изображений.
Проблема автоматизированного ведения до сих пор реализовывалась с помощью затратных дополнительных инвестиций в инфраструктуру перегона, такую как индукционные петли, компьютеры вдоль перегона и системы связи между поездом и компонентами перегона.
Но не только аспект анализа изображений на базе колеи/рельсового пути имеет значение для будущего автоматизированного (автономного) или с участием машиниста ведения, но и последующие технические аспекты, которые все в большей или меньшей степени находятся в техническом контексте с настоящей заявкой на патент и поэтому приведены, и в связи с этим их содержания должны учитываться и при необх. даже включаться в нее.
Речь идет о следующих аспектах:
1) Автоматизированное распознавание сигналов в железнодорожном/рельсовом сообщении в соответствии с международной заявкой на патент (заявка № PCT/EP2016/057804; публикация № WO 2017/174155 A1) и раскрытой в ней технической теорией.
2) Автоматическое распознавание опасных ситуаций в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка № 102016224358.6) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
3) Автоматическое распознавание препятствий в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка № 102016224344.6) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
4) Альтернативное определение положений в рельсовом сообщении, когда традиционное определение положений со спутниковой поддержкой не срабатывает или является недостаточным, в соответствии с заявкой на патент DE (заявка № 10201624355.1) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
5) Автоматическое распознавание колей/рельсовых путей в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка № 102016224335.7) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
Вышеназванная контекстовая задача решается, исходя из определенного в ограничительной части п.1 формулы изобретения способа анализа изображений с помощью признаков, указанных в отличительной части п.1 формулы изобретения.
Помимо этого, вышеназванная контекстовая задача решается, исходя из определенного в ограничительной части п.11 формулы изобретения устройства для анализа изображений с помощью признаков, указанных в отличительной части п.11 формулы изобретения.
Далее, вышеназванная контекстовая задача решается, исходя из определенного в ограничительной части п.26 формулы изобретения железнодорожного транспортного средства, в частности рельсового транспортного средства, с помощью признаков, указанных в отличительной части п.26 формулы изобретения.
Идея, лежащая в основе изобретения по независимым пп.1, 11 и 26 формулы изобретения, заключается в том, чтобы на базе нескольких, представляющих некоторую область колеи/рельсового пути изображений в некоторой созданной на этих изображениях области изображения, в которой зарегистрированные применительно к графически изображенной области колеи/рельсового пути колеи/рельсовые пути лежат по существу в одном и том же месте, исходя из долей зарегистрированных колей/рельсовых путей в области изображения, с помощью алгоритмов распознавания кромок распознавать ход колеи/рельсового пути, который используется железнодорожным транспортным средством, по изменяющейся на зарегистрированном изображении доле изображения колеи/рельсового пути по отношению ко всему изображению и сравнивать с сохраненной в памяти известной графической метаинформацией, причем эта метаинформация содержит как относящиеся к колее или, соответственно, относящиеся к рельсовому пути первичные метаданные, так и относящиеся к железнодорожному перегону или, соответственно, относящиеся к рельсовому перегону вторичные метаданные.
При этом графическая метаинформация в буквальном смысле содержит данные признаков и свойств области колеи/рельсового пути, зарегистрированной на изображениях.
При этом основным принципом изобретения является, чтобы путем автоматизированной аналитической оценки изображений распознавать видимую на данном изображении часть колеи следования/рельсового пути следования, чтобы предпочтительно (в предпочтительных усовершенствованиях) достигались следующие цели:
I. Распознавание, где на этом изображении находятся предварительные и основные сигналы для движения.
II. Распознавание, ведет ли путь следования дальше НАЛЕВО, ПРЯМО, НАПРАВО.
III. Распознавание, находятся ли на колее/рельсовом пути люди.
IV. Распознавание, насколько удалено железнодорожное транспортное средство от какого-либо объекта.
V. Распознавание, находятся ли на колее/рельсовом пути недопустимые объекты.
При этом целью в каждом случае является сделать возможным вклад в полностью автоматизированное ведение без дополнительных инвестиций в инфраструктуру перегона.
Автоматизированная аналитическая оценка изображений, которые регистрируются с транспортного средства, в частности из перспективы машиниста моторвагона и/или из неподвижного, обеспечивающего видимость колеи положения в или на транспортном средстве, до сих пор осуществлялась паушально путем анализа «лежащей перед транспортным средством области» без детальной ссылки на колею/рельсовый путь на изображении. Но она может предпочтительным образом по меньшей мере частично достигаться с помощью следующих шагов:
1. В первом шаге с помощью по меньшей мере одного прибора для записи изображений (напр., одного или нескольких приборов для сбора изображений, таких как видеокамеры, лазерные сенсоры, инфракрасная камера, тепловые камеры для съемки изображений, радарные устройства, другие приборы для сбора изображений и пр.) с железнодорожного транспортного средства, например, из перспективы машиниста моторвагона регистрируется или, соответственно, снимается множество изображений.
Многократное осуществление релевантно, прежде всего, для целей редундантности.
a. Но в одной из модификаций или усовершенствований, дополнений изобретения могут также применяться изображения от нескольких приборов для записи изображений или, соответственно, приборов для сбора изображений одинакового вида (напр., двух видеокамер) для взаимной валидации и синтеза результатов.
b. В другой модификации или усовершенствовании, дополнении изобретения могут также применяться изображения от нескольких приборов для записи изображений или, соответственно, приборов для сбора изображений различного вида (напр., видеокамера и тепловая камера для съемки изображений) для взаимной валидации и синтеза результатов.
c. В другой модификации или усовершенствовании, дополнении изобретения могут использоваться не создающие изображений сенсоры, такие как, например, радар, ультразвук или лазер для валидации графической информации.
2. Во втором шаге рассматривается область на ближнем нижнем крае изображения, потому что там колеи/рельсовые пути лежат по существу в одном и том же месте. При этом предпочтителен тот случай, когда прибор для записи изображений жестко смонтирован на железнодорожном транспортном средстве/рельсовом транспортном средстве. С помощью алгоритмов распознавания кромок, которые применяются при стандартной обработке изображений, может распознаваться ход колеи следования/рельсового пути следования, исходя из долей колеи/рельсового пути на нижнем крае изображения.
a. В одной из оптимизаций может учитываться максимальная степень изгиба колей/рельсовых путей во избежание ошибок распознавания рельсовых путей.
b. В другой оптимизации колея следования /рельсовый путь следования может также распознаваться в обход стрелок, при этом распознается сплошной направляющий рельс рельсового пути.
3. В третьем шаге привлекаются метаданные о колее/рельсовом пути, которые известны, в частности расстояние между параллельно проложенными рельсами, а также ширина головки рельса.
4. В третьем шаге привлекаются метаданные о перегоне движения, которые известны, напр., в каких географических положениях находятся железнодорожные переезды, стрелки или сигнальные установки.
5. На базе вышеназванных данных и шагов могут (достигаться) вышеназванные пять целей I…V.
I. Распознавание, где на этом изображении находятся предварительные и основные сигналы для движения.
i. На основе текущего географического положения [железнодорожному транспортному средству/рельсовому транспортному средству известны связанные с ним координаты места на базе данных GPS или данных определения положения в соответствии с заявкой на патент DE (заявка №…)] может сначала распознаваться область на изображении, в которой должен распознаваться сигнал.
ii. Затем определяется, где в этой области проходит рельсовый путь следования (результат данных из шага 2).
iii. Метаданные о расстоянии до сигнальной установки могут затем применяться следующим образом.
1. На релевантном участке изображения на базе ширины колеи/рельсового пути известно, насколько сигнальная установка горизонтально и вертикально удалена от рельсового пути.
2. Также известны наружные кромки сигнальной установки.
3. Итак, на коротких расстояниях удаленности от транспортного средства с помощью стандартного алгоритма распознавания кромок делается попытка распознать наружные кромки сигнальной установки на известном расстоянии от колеи/от рельсового пути, и причем до тех пор, пока не будет найдена хорошая зона обнаружения. Тогда там находится искомая сигнальная установка.
II. Распознавание, ведет ли путь следования дальше НАЛЕВО или ПРЯМО или НАПРАВО.
i. Колея следования/рельсовый путь следования известен из шага 2).
ii. Воображаемая колея/воображаемый рельсовый путь ПРЯМО может легко создаваться искусственно, так как надо только линейно продолжить известную колею следования /известный рельсовый путь следования на нижнем крае изображения.
iii. Затем колея следования /рельсовый путь следования может сравниваться с воображаемой «колеей ПРЯМО»/с воображаемым «рельсовым путем ПРЯМО».
1. Если колея следования/рельсовый путь следования и воображаемая «колея ПРЯМО»/воображаемый «рельсовый путь ПРЯМО» идентичны, то колея следования/рельсовый путь следования ведет ПРЯМО.
2. Если колея следования/рельсовый путь следования лежит СЛЕВА от воображаемой «колеи ПРЯМО»/воображаемого «рельсового пути ПРЯМО», то речь идет о повороте налево. Из расстояния от рельсового пути следования до воображаемой «колеи ПРЯМО»/воображаемого «рельсового пути ПРЯМО», а также расстояния от транспортного средства (рассчитываемого из ширины колеи/рельсового пути на нижнем крае изображения и ширины колеи/рельсового пути в каждом релевантном участке изображения) может рассчитываться степень левой кривизны.
3. В случае, когда колея следования/рельсовый путь следования лежит СПРАВА от воображаемой «колеи ПРЯМО»/воображаемого «рельсового пути ПРЯМО», см. предыдущий пункт.
Наряду с распознаванием, ведет ли путь следования дальше НАЛЕВО или ПРЯМО или НАПРАВО, существует также еще случай, когда на изображении есть стрелки, и они, конечно, влияют на дальнейший путь следования. В этой связи ссылаемся на выполнение автоматического распознавания колей/рельсовых путей в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка №102016224335.7) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
III. Распознавание, находятся ли на колее/рельсовом пути люди.
i. Обычный размер человека (от ребенка (70 см) до взрослого мужчины (220 см) может ставиться в соотношение с шириной колеи/рельсового пути.
ii. Затем колея следования/рельсовый путь следования на изображении, а также критическая область слева и справа от колеи/рельсового пути может разделяться на несколько анализируемых участков при возрастающем расстоянии от транспортного средства. (Критическая область, в зависимости от окружения колеи/рельсового пути (городская зона против сельской местности) может определяться с различной шириной). Затем в каждом анализируемом участке может применяться стандартный алгоритм паттернов для распознавания людей.
1. В другой оптимизации могут соотноситься анализируемые участки нескольких следующих друг за другом изображений для распознавания движения людей и отслеживания их движения для предварительного расчета потенциальных столкновений.
IV. Распознавание, насколько удалено железнодорожное транспортное средство от какого-либо объекта.
i. Предположим, на колее/рельсовом пути или в критической области рядом с колеей/рельсовым путем распознается какой-либо объект.
ii. Тогда ширина пикселя колеи/рельсового пути на высоте объекта должна соотноситься с шириной колеи/рельсового пути на нижнем крае изображения. Из отношения и известной ширины колеи/рельсового пути может рассчитываться расстояние до этого объекта.
V. Распознавание, находятся ли на колее/рельсовом пути недопустимые объекты.
Объекты, которые лежат на колее/рельсовом пути, могут распознаваться таким образом, что в шаге 2 не срабатывает алгоритм распознавания кромок для колей/рельсовых путей.
В одной из модификаций или усовершенствований, дополнений упорядоченный образец колеи/между рельсовыми путями, который образуется балкой колеи/балкой рельсового пути, может использоваться в качестве основы для распознавания нарушений закономерности.
Если распознается нарушение закономерности (напр., веха или играющий ребенок), то во втором шаге может определяться допустимость этого нарушения закономерности путем сравнения с банком данных изображений. Например, в ходе инициализации могут регистрироваться все нарушения закономерности по всем изображениям некоторого перегона и после этого предоставляться для сравнения.
При намеченном выше распознавании колеи/рельсового пути может достигаться, что:
- легче распознаются предварительные и основные сигналы;
- может распознаваться левая и правая кривизна колеи/рельсового пути;
- облегчается распознавание людей на колее/рельсовом пути;
- может рассчитываться расстояние от железнодорожного транспортного средства до объектов/людей на колее/рельсовом пути или в критической области слева или рядом с колеей/рельсовым путем;
- отслеживание объектов/людей (слежение) в критической области изображения, упрощается расчет возможных столкновений;
- анализируемые предметы при неблагоприятных условиях видимости могут распознаваться надежнее, чем машинистом моторвагона;
- машинисты моторвагона больше не нужны для распознавания описанных анализируемых предметов, так что ведение возможно независимо от их наличия.
В ходе одного из предпочтительных усовершенствований изобретения применительно к устройству для анализа изображений по п.11 формулы изобретения могут также применяться следующие дополнительные компоненты a)-c) для прибора для записи изображений (напр., прибор для сбора изображений):
a. Корректирующий компонент по п.21 формулы изобретения, который приобщает данные о погоде и освещенности для аналитической оценки графического материала. При этом, например, при сильном тумане, аналитическая оценка видеоизображений может ограничиваться первыми 50 метрами перед железнодорожным транспортным средством или, соответственно, рельсовым транспортным средством, и соответственно дросселироваться скорость транспортного средства.
b. Компонент изменения фокусного расстояния по п.22 формулы изобретения, который, в зависимости от окружения (напр., вокзал, городская зона, сельская местность и пр.) и скорости выбирает правильный угол съемки, чтобы таким образом оптимально поддерживать аналитическую оценку изображения. Например, тогда могут надлежащим образом обслуживаться как ситуации съемки на свободном перегоне (требуют изображений из большой удаленности, чтобы на основании скорости можно быть реагировать своевременно), так и ситуации съемки в области вокзала (требуют изображений, имеющих большую ширину).
c. Компонент освещения по п.23 формулы изобретения, например, прожектор, который работает в пределах или вне видимой человеку области, с помощью которого улучшается качество графического материала, снимаемого прибором для записи изображений или, соответственно, прибором для сбора изображений ночью или при плохих погодных условиях.
Помимо этого, возможно, чтобы устройство для анализа изображений было выполнено и функционировало в виде виртуальной машины как «Software Defined Signal Recognition of Rail Traffic Systems» (англ. программно-определяемое распознавание сигналов систем железнодорожного транспорта).
Другие преимущества изобретения вытекают из последующего описания одного из примеров осуществления изобретения с помощью фиг.1-3. На них показано:
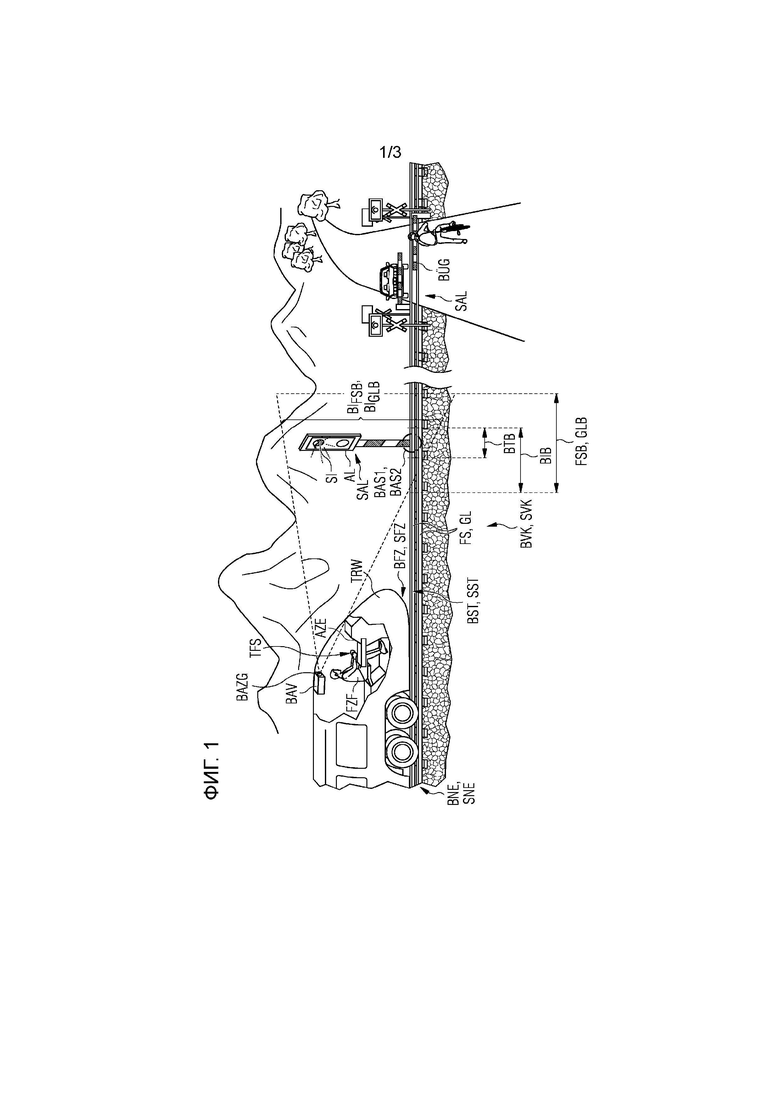
фиг.1: анализ изображений на базе колеи для распознавания путевых установок на железнодорожном перегоне и хода перегонов;
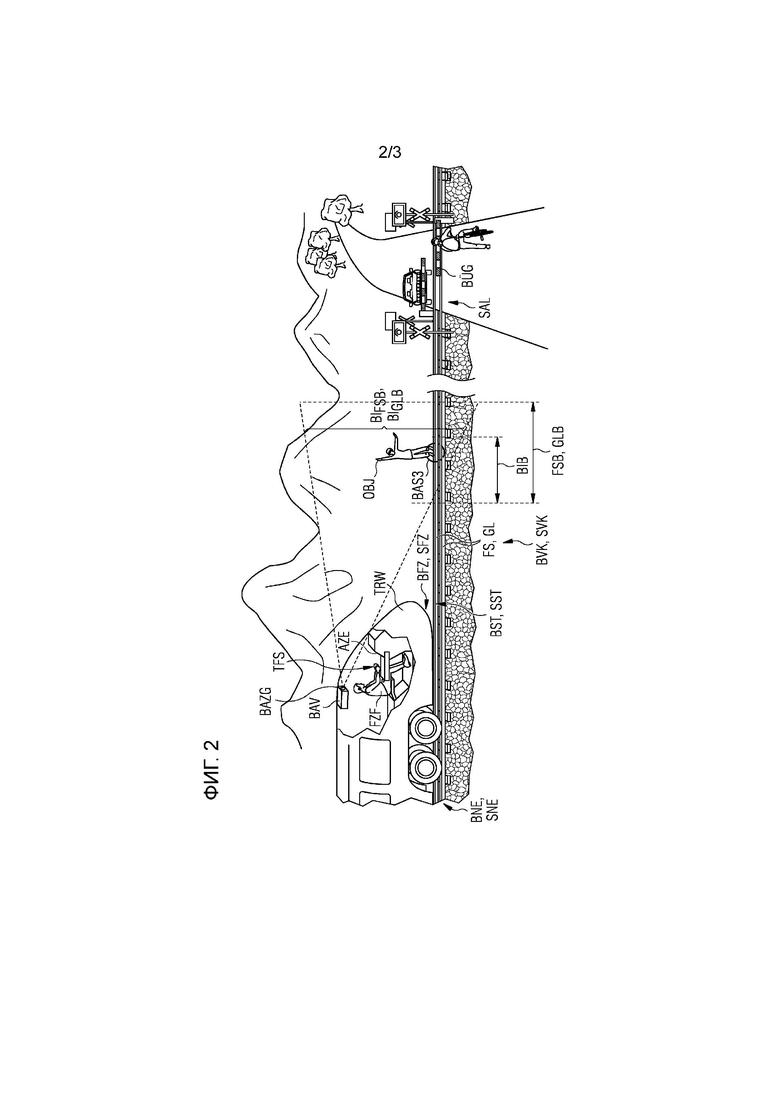
фиг.2: анализ изображений на базе колеи для распознавания объектов, человека, находящегося на колее железнодорожного перегона;
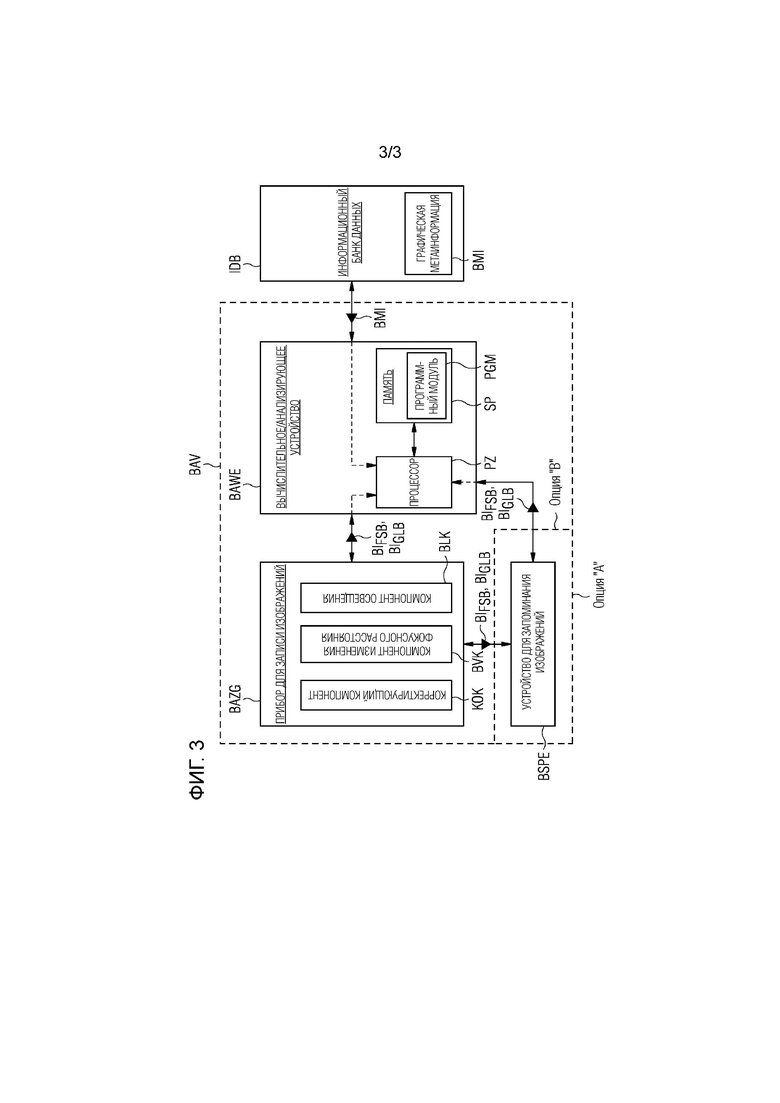
фиг.3: принципиальная конструкция устройства для анализа изображений для анализа изображений на базе колеи в соответствии с фиг.1 и 2.
На фиг.1 показан анализ изображений на базе колеи для распознавания путевой установки SAL, такой как, напр., железнодорожный переезд BÜG, стрелка или подающая сигнал SI или направляющая установка AL в железнодорожном сообщении BVK, когда на изображенном отдельными участками железнодорожном перегоне BST железнодорожной сети BNE железнодорожное транспортное средство BFZ приближается по колее FS железнодорожного перегона BST к сигнальной установке SI, AL. При этом анализе изображений на базе колеи для распознавания путевой установки SAL или, соответственно, подающей сигнал SI или направляющей установки AL необходимо также, хотя на фиг.1 явно не изображено, распознавать ход перегона, т.е. ход колеи FS, что касается направлений колеи FS, таких как ПРЯМО, НАЛЕВО, НАПРАВО.
По настоящему примеру осуществления отнесенный к колее железнодорожный перегон BST железнодорожной сети BNE представляет собой рельсовый перегон SST рельсовой сети SNE, на котором в рельсовом сообщении для анализа изображений на базе рельсового пути для распознавания путевой установки SAL рельсовое транспортное средство SFZ находится в пути на рельсовом пути GL и приближается к путевой установке SAL на рельсовом пути GL. Вместо изображенного рельсового сообщения SVK с едущим по рельсовому перегону SST рельсовой сети SNE рельсовым транспортным средством SFZ и здесь также, как уже рассматривалось, в качестве другого примера осуществления изобретения возможна и представима также любая другая, какая угодно система железнодорожного сообщения на базе ближнего или дальнего сообщения. Так, можно было бы вести речь также, напр., о системе сообщения подвесной дороги на магнитной подвеске (ключевое слово: Трансрапид, Маглев и пр.), имеющей соответственно сравнимую инфраструктуру, состоящую из железнодорожной сети, железнодорожного перегона и железнодорожного транспортного средства.
В изображенной на фиг.1 системе рельсового сообщения в моторвагоне TRW рельсового транспортного средства SFZ, имеющего пульт TFS машиниста моторвагона и интегрированное устройство AZE отображения, в котором находится рабочее место машиниста FZF транспортного средства, для анализа изображений на базе рельсового пути для распознавания путевой установки SAL размещено устройство BAV для анализа изображений. Для этого устройство BAV для анализа изображений включает в себя предпочтительно выполненный в виде сенсора прибор BAZG для записи изображений, который выполнен, напр., в виде обычной видеокамеры, лазерного сенсора, тепловой камеры для съемки изображений, радарного устройства, инфракрасной камеры и пр., и в связи со сбором изображений называется также устройством для сбора изображений.
С помощью прибора BAZG для записи изображений, когда едущее по рельсовому пути GL рельсовое транспортное средство SFZ приближается к сигнальной установке SI, AL, с рельсового транспортного средства SFZ, напр., из перспективы машиниста FZF моторвагона на пульте TFS машиниста моторвагона TRW и/или из неподвижного, обеспечивающего видимость колеи положения в или на транспортном средстве SFZ, для находящейся перед рельсовым транспортным средством SFZ, при этом предпочтительно ориентирующейся на скорость рельсового транспортного средства SFZ области GLB рельсового пути может регистрироваться множество представляющих эту область GLB рельсового пути изображений BIGLB.
Формулируя обобщенно: применительно к едущему по колее FS железнодорожному транспортному средству BFZ для находящейся перед железнодорожным транспортным средством BFZ, при этом предпочтительно ориентирующейся на скорость железнодорожного транспортного средства BFZ области FSB колеи может регистрироваться множество представляющих эту область FSB колеи изображений BIFSB.
На каждом из изображений BIFSB, BIGLB области FSB, GLB колеи содержится некоторая область BIB изображения, в которой применительно к графически изображенной области FSB, GLB колеи зарегистрированные колеи FS, GL лежат по существу в одном и том же месте и, исходя из этих долей зарегистрированных колей FS, GL, с помощью алгоритмов распознавания кромок распознается ход используемой железнодорожным транспортным средством BFZ, SFZ колеи FS, GL по изменяющейся на зарегистрированном изображении доле изображения колеи FS, GL по отношению ко всему зарегистрированному изображению.
Помимо этого, для текущего найденного географического положения железнодорожного транспортного средства BFZ, SFZ на изображениях BIFSB, BIGLB содержится отдельная область BTB изображения, в которой сигнал SI установки AL может распознаваться как однозначный признак путевой установки SAL. Эта отдельная область BTB изображения имеет, в свою очередь, первый участок BAS1 изображения, через который ведет используемая железнодорожным транспортным средством BFZ, SFZ колея FS, GL, и второй участок BAS2 изображения, причем последний является релевантным для распознавания хода перегона т.е. распознавания соответственно направления ПРЯМО, направления НАЛЕВО или направления НАПРАВО колеи FS, GL.
Как теперь на основании изображений BIFSB, BIGLB области FSB, GLB колеи, имеющих содержащуюся на них область BIB изображения и отдельную область BTB изображения, включающую в себя два участка BAS1, BAS2 изображения, выполняется анализ изображений для распознавания путевой установки или, соответственно, распознавания сигнальной установки SI, AL и для распознавания хода перегона, поясняется ниже с помощью описания фиг.3.
На фиг.2 показан анализ изображения на базе колеи для распознавания объектов в железнодорожном сообщении BVK, когда на снова изображенном отдельными участками железнодорожном перегоне BST железнодорожной сети BNE, железнодорожное транспортное средство BFZ, на колее FS железнодорожного перегона BST по находится меньшей мере один объект OBJ, предпочтительно человек, животное, движущийся или неподвижный предмет, которые являются посторонними в области колеи, и им, собственно, нечего там делать, то есть находятся там недопустимым образом.
Отнесенный к колее железнодорожный перегон BST железнодорожной сети BNE и здесь также представляет собой рельсовый перегон SST рельсовой сети SNE, на котором в рельсовом сообщении SVK для анализа изображений на базе рельсового пути для распознавания объектов рельсовое транспортное средство SFZ находится в пути на рельсовом пути GL и приближается к объекту OBJ. Вместо изображенного рельсового сообщения SVK с едущим по рельсовому перегону SST рельсовой сети SNE рельсовым транспортным средством SFZ и здесь также, как уже рассматривалось, в качестве другого примера осуществления изобретения возможна и представима также любая другая, какая угодно система железнодорожного сообщения на базе ближнего или дальнего сообщения. Так, можно было бы вести речь также, напр., о системе сообщения подвесной дороги на магнитной подвеске (ключевое слово: Трансрапид, Маглев и пр.), имеющей соответственно сравнимую инфраструктуру, состоящую из железнодорожной сети, железнодорожного перегона и железнодорожного транспортного средства.
В изображенной на фиг.2 системе рельсового сообщения и здесь также в моторвагоне TRW рельсового транспортного средства SFZ, имеющего пульт TFS машиниста моторвагона и интегрированное устройство AZE отображения, в котором находится рабочее место машиниста FZF транспортного средства, для анализа изображений на базе рельсового пути для распознавания объектов размещено устройство BAV для анализа изображений. Для этого устройство BAV для анализа изображений снова включает в себя предпочтительно выполненный в виде сенсора прибор BAZG для записи изображений, который выполнен, напр., в виде обычной видеокамеры, лазерного сенсора, тепловой камеры для съемки изображений, радарного устройства, инфракрасной камеры и пр.
С помощью прибора BAZG для записи изображений, когда едущее по рельсовому пути GL рельсовое транспортное средство SFZ приближается к объекту OBJ, с рельсового транспортного средства SFZ, напр., из перспективы машиниста FZF моторвагона на пульте TFS машиниста моторвагона TRW и/или из неподвижного, обеспечивающего видимость колеи положения в или на транспортном средстве SFZ, для находящейся перед рельсовым транспортным средством SFZ, при этом предпочтительно ориентирующейся на скорость рельсового транспортного средства SFZ области GLB рельсового пути может регистрироваться множество представляющих эту область GLB рельсового пути изображений BIGLB.
Формулируя обобщенно: применительно к едущему по колее FS железнодорожному транспортному средству BFZ для находящейся перед железнодорожным транспортным средством BFZ, при этом предпочтительно ориентирующейся на скорость железнодорожного транспортного средства BFZ области FSB колеи снова может регистрироваться множество представляющих эту область FSB колеи изображений BIFSB.
На каждом из изображений BIFSB, BIGLB области FSB, GLB колеи снова содержится некоторая область BIB изображения, в которой применительно к графически изображенной области FSB, GLB колеи зарегистрированные колеи FS, GL лежат по существу в одном и том же месте и, исходя из этих долей зарегистрированных колей FS, GL, с помощью алгоритмов распознавания кромок распознается ход используемой железнодорожным транспортным средством BFZ, SFZ колеи FS, GL по изменяющейся на зарегистрированном изображении доле изображения колеи FS, GL по отношению ко всему зарегистрированному изображению.
Помимо этого, на изображениях BIFSB, BIGLB содержится третий участок BAS3 изображения, в котором находится объект OBJ.
Как теперь на основании изображений BIFSB, BIGLB области FSB, GLB колеи, имеющих содержащуюся в них область BIB изображений, и участка BAS3 изображения выполняется анализ изображений для распознавания объекта, поясняется ниже с помощью описания фиг.3.
На фиг.3 показана принципиальная конструкция устройства BAV для анализа изображений, для анализа изображений на базе рельсового пути для распознавания путевой установки и хода перегона в соответствии с фиг.1 и для распознавания объектов в соответствии с фиг.2, когда железнодорожное транспортное средство BFZ, SFZ, которое находится в пути на колее FS, GL, приближается в соответствии с фиг.2 к путевой установке SAL или, соответственно, подающей сигнал SI или направляющей установке AL на железнодорожном перегоне BST, SST или, соответственно, в соответствии с фиг.2, к находящемуся на колее FS, GL объекту OBJ.
При этом исходной точкой для каждого распознавания, в соответствии с рассуждениями к фиг.1 и 2, является прибор BAZG для записи изображений, который регистрирует изображения BIFSB, BIGLB области FSB, GLB колеи для этого каждого распознавания.
Для этого прибор BAZG для записи изображений предпочтительно выполнен с возможностью поворота ориентации на объект изображения.
Далее, возможно и при определенных обстоятельствах также по техническим причинам, связанным с регистрацией, целесообразно, чтобы в устройстве BAV для анализа изображений содержались несколько приборов BAZG для записи изображений одинаковой конструкции, напр., несколько видеокамер, или приборов различной конструкции, напр., несколько видеокамер, лазерных сенсоров, сенсоров на базе радара, основанных на беспроводной локации и измерении расстояния, инфракрасных камер и/или тепловых камер для съемки изображений, которые снимают изображения BIFSB, BIGLB. Такое составное исполнение записи изображения или, соответственно, сбора изображений может быть релевантно, в т.ч., для целей редундантности.
Для дополнительного улучшения качества изображений, записываемых или собираемых с помощью прибора BAZG для записи изображений, в приборе BAZG для записи изображений предпочтительно содержатся следующие компоненты:
1. Корректирующий компонент KOK, с помощью которого для аналитической оценки графического материала приобщаются данные о погоде и освещенности. С помощью этого компонента можно, напр., при сильном тумане, ограничивать аналитическую оценку видеоизображений первыми 50 метрами перед рельсовым транспортным средством и соответственно дросселировать скорость рельсового транспортного средства.
2. Компонент BVK изменения фокусного расстояния, который, в зависимости от окружения (напр., вокзал, городская зона, сельская местность и пр.) и скорости выбирает правильный угол съемки, чтобы таким образом оптимально поддерживать аналитическую оценку изображения. Благодаря этому тогда могут надлежащим образом обслуживаться как ситуации съемки на свободном перегоне (требуют изображений из большой удаленности, чтобы на основании скорости можно быть реагировать своевременно), так и ситуации съемки в области вокзала (требуют изображений, имеющих большую ширину). Дополнительно путем слияния графических данных и данных перегона возможно фокусирование на особенно интересных областях вдоль рельсового перегона SST в рельсовой сети SNE, таких как, напр., железнодорожный переезд.
3. Компонент BLK освещения, выполненный, например, в виде прожектора, который работает в пределах или вне видимой человеку области, и с помощью которого улучшается качество графического материала, снимаемого прибором для записи изображений или, соответственно, прибором BAZG для сбора изображений ночью или при плохих погодных условиях.
Снятые таким образом изображения сохраняются прибором BAZG для записи изображений в устройстве BSPE для запоминания изображений. Это устройство BSPE для запоминания изображений либо, в соответствии с опцией «A», в качестве компонента устройства BAV для анализа изображений, может быть соответственно соединено с прибором BAZG для записи изображений, либо, в соответствии с опцией «B», вне устройства BAV для анализа изображений, напр., в виде банка памяти данных, в моторвагоне или в облаке данных быть предназначено для прибора BAZG для записи изображений или, соответственно, может соединяться с ним.
Для анализа на базе колеи записанных или, соответственно, собранных изображений для распознавания путевой установки и хода перегона в соответствии с фиг.1 и для распознавания объектов в соответствии с фиг.2, прибор BAZG для записи изображений соединен с вычислительным/анализирующим устройством BAWE, которое тоже является одним из компонентов устройства BAV для анализа изображений. Для этой цели вычислительное/анализирующее устройством BAWE, как и прибор BAZG для записи изображений, либо, в соответствии с опцией «A», соединено с устройством BSPE для запоминания изображений, либо, в соответствии с опцией «B», предназначено для устройства BSPE для запоминания изображений или, соответственно, может соединяться с ним. Таким образом возникает блок отдельных функций из вычислительного/анализирующего устройства BAWE, прибора BAZG для записи изображений и устройства BSPE для запоминания изображений, у которого названные компоненты устройства BAV для анализа изображений взаимодействуют отдельными функциями для поддерживаемого вычислениями и аналитической оценкой анализа изображений на базе колеи для распознавания путевой установки /хода перегона/объектов.
Для образования полного функционального блока, у которого функционально взаимодействуют участвующие в нем отдельные блоки, названный блок отдельных функций расширяется другим отдельным блоком, информационным банком IDB данных. При этом информационный банк IDB данных может, например, быть интегрирован с устройством BSPE для запоминания изображений как конструктивный блок в одном общем запоминающем устройстве. Это, не изображенное явно на фиг.3, запоминающее устройство может, со своей стороны, так же, как и устройство BSPE для запоминания изображений, либо, в соответствии с опцией «A», в качестве компонента устройства BAV для анализа изображений, быть соответственно соединено с прибором BAZG для записи изображений и вычислительным/анализирующим устройством BAWE, либо, в соответствии с опцией «B», вне устройства BAV для анализа изображений в моторвагоне или в облаке данных быть предназначено для прибора BAZG для записи изображений и вычислительного/анализирующего устройства BAWE или, соответственно, может соединяться с ним. В этой связи ссылаемся на устройство для запоминания информации в заявке на патент DE (заявка № 102016224355.1) и соответствующей ей международной заявке на патент (заявка № PCT/…; публикация № WO …) об альтернативном определении положения в рельсовом сообщении, когда традиционное определение положений со спутниковой поддержкой не срабатывает или является недостаточным.
В информационном банке IDB данных сохранена графическая метаинформация BMI, которая в буквальном смысле содержит данные признаков и свойств области FSB, GLB колеи/рельсового пути, зарегистрированной на изображениях BIFSB, BIGLB.
В этой графической метаинформации BMI содержатся как относящиеся к колее FS, GL первичные метаданные, которые предпочтительно указывают расстояние между параллельно проходящими колеями FS, GL, а также ширину головки колеи, в частности головки рельса, так и относящиеся к железнодорожному перегону BST, SST вторичные метаданные, которые предпочтительно указывают, в каких географических положениях или локальных координатах находятся установки на железнодорожном перегоне BST, SST, так называемые путевые установки SAL, такие как, напр., железнодорожный переезд BÜG на фиг.1 и 2, стрелки или подающая сигнал SI или направляющая установка AL.
В соответствии с изображением на фиг.3 информационный банк IDB данных предназначен для устройства BAV для анализа изображений или, соответственно, может соединяться с ним таким образом, что вычислительное/анализирующее устройство BAWE для поддерживаемого вычислениями и аналитической оценкой анализа изображений на базе колеи для распознавания путевой установки/хода перегона/объекта получает доступ к сохраненной в информационном банке IDB данных графической метаинформации BMI. Для этого информационный банк IDB данных предпочтительно расположен вне устройства BAV для анализа изображений, напр., в виде банка данных, в моторвагоне или выполнен в виде облака данных.
Для поддерживаемого вычислениями/аналитической оценкой анализа изображений на базе колеи для распознавания путевой установки/хода перегона/объекта вычислительное/анализирующее устройство BAWE имеет предпочтительно энергонезависимую, считываемую память SP, в которой сохранены считываемые процессором команды управляющей программы управляющего анализом изображений для распознавания путевой установки/хода перегона/объекта программного модуля PGM, и процессор PZ, который выполняет команды управляющей программы программного модуля PGM для поддерживаемого вычислениями/аналитической оценкой анализа изображений на базе колеи для распознавания путевой установки/хода перегона/объекта. Для этого процессор PZ дополнительно, наряду с доступами к графической метаинформации BMI в информационном банке IDB данных, в целях управления и для считывания данных на приборе получает доступ к прибору BAZG для записи изображений и устройству BSPE для запоминания изображений.
Вычислительное/анализирующее устройство BAWE или, соответственно, программный модуль PGM, имеющий процессор PZ, выполняющий команды управляющей программы программного модуля PGM для поддерживаемого вычислениями/аналитической оценкой анализа изображений на базе колеи для распознавания путевой установки/хода перегона/объекта, для поддерживаемого вычислениями/аналитической оценкой анализа изображений на базе колеи для распознавания путевой установки/хода перегона/объекта сначала в объеме выполненного блока отдельных функций, выполнен таким образом, что на каждом из изображений BIFSB, BIGLB создается область BIB изображения, в которой применительно к графически изображенной области FSB, GLB зарегистрированные колеи FS, GL лежат по существу в одном и том же месте.
Дополнительно вычислительное/анализирующее устройство BAWE или, соответственно, программный модуль PGM, имеющий процессор PZ, выполняющий команды управляющей программы программного модуля PGM в объеме выполненного блока отдельных функций, выполнен таким образом, что, исходя из долей зарегистрированных колей FS, GL, в области BIB изображения с помощью алгоритмов распознавания кромок распознается ход используемой железнодорожным транспортным средством BFZ, SFZ колеи FS, GL по изменяющейся на зарегистрированном изображении доле изображения колеи FS, GL по отношению ко всему зарегистрированному изображению, и сравнивается с сохраненной в информационном банке IDB данных известной графической метаинформацией BMI.
Для распознавания путевой установки SAL или, соответственно, подающей сигнал SI или направляющей установки AL анализ изображений на базе колеи в вычислительном/анализирующем устройстве BAWE осуществляется предпочтительно таким образом, что на изображении BIFSB, BIGLB распознается, где находится сигнальная установка SI, AL или, соответственно, путевая установка SAL, при этом
1) для текущего найденного географического положения железнодорожного транспортного средства BFZ, SFZ на изображении BIFSB, BIGLB создается отдельная область BTB изображения, в которой может распознаваться однозначный признак путевой установки SAL или, соответственно, сигнал SI установки AL,
2) в этой отдельной области BTB изображения определяется первый участок BAS1 изображения, через который ведет используемая железнодорожным транспортным средством BFZ, SFZ колея FS, GL,
3) с помощью первого известного метаданного о расстоянии до путевой установки SAL или, соответственно, сигнальной установки SI, AL вторичных метаданных в сохраненной в памяти графической метаинформации BMI находится, на каком расстоянии на базе ширины колеи FS, GL на участке BAS1 изображения находится путевая установка SAL или, соответственно, сигнальная установка SI, AL от колеи FS, GL,
4) с помощью второго известного метаданного о наружных кромках путевой установки SAL или, соответственно, сигнальной установки SI, AL вторичных метаданных в сохраненной в памяти графической метаинформации BMI и стандартного алгоритма распознавания кромок делается попытка распознать наружные кромки путевой установки SAL или, соответственно, сигнальной установки SI, AL на найденном в 3) расстоянии от колеи FS, GL до тех пор, пока известная и распознанная наружная кромка по существу не перекроются.
Для распознавания хода перегона, ведет ли путь следования дальше налево или направо или прямо, то есть в каком направлении ведет распознанная по распознанному ходу колея FS, GL, вычислительное/анализирующее устройство BAWE при анализе изображений на базе колеи предпочтительно также выполнено таким образом, что на изображении BIFSB, BIGLB распознается, в каком направлении, в частности НАЛЕВО, НАПРАВО или ПРЯМО, едет железнодорожное транспортное средство BFZ, SFZ, при этом для колеи FS, GL, распознанной по распознанному ходу,
1) путем линейного продолжения колеи FS, GL, используемой в соответствии с областью BIB изображения железнодорожным транспортным средством BFZ, SFZ, искусственно создается псевдо-колея ПРЯМО, в частности псевдо-рельсовый путь ПРЯМО,
2) эта псевдо-колея ПРЯМО сравнивается с используемой колеей FS, GL таким образом, чтобы
2) было распознано направление ПРЯМО, когда сравненные колеи FS, GL идентичны,
2.2) было распознано направление НАЛЕВО, напр., поворот НАЛЕВО, когда используемая колея FS, GL лежит слева от псевдо-колеи ПРЯМО,
2.3) было распознано направление НАПРАВО, напр., поворот НАПРАВО, когда используемая колея FS, GL лежит справа от псевдо-колеи ПРЯМО.
При этом в частности, возможно, и вычислительное/анализирующее устройство BAWE выполнено соответственно, чтобы по расстоянию от используемой колеи FS, GL до псевдо-колеи ПРЯМО, а также до железнодорожного транспортного средства BFZ, SFZ, которое рассчитывается из ширины колеи FS, GL в области BIB изображения и ширины колеи FS, GL в каждом указанном, релевантном для данного распознавания направления ПРЯМО, направления НАЛЕВО или направления НАПРАВО втором участке BAS2 изображения, рассчитывалась степень кривизны направления/поворота НАЛЕВО или, соответственно, направления/поворота НАПРАВО.
Для распознавания объекта вычислительное/анализирующее устройство BAWE при анализе изображений на базе колеи, помимо этого, предпочтительно выполнено таким образом, что на изображении BIFSB, BIGLB распознается, находится ли на используемой колее FS, GL по меньшей мере один объект OBJ, который, например, может представлять собой человека, животное, движущийся или неподвижный предмет, при этом
1) характерный для человека размер человека и/или характерный для предмета размер движущегося предмета ставится в соотношение с известной шириной колеи FS, GL, которая получается из третьего известного метаданного о ширине колеи FS, GL первичных метаданных в сохраненной в памяти графической метаинформации BMI,
2) на изображении BIFSB, BIGLB используемая колея FS, GL, а также критическая область, которая, напр., имеет ширину различного размера, в зависимости от окружения колеи FS, GL, будь то сельская местность или город, слева и справа от используемой колеи FS, GL, разделяются на несколько анализируемых участков при возрастающем расстоянии до железнодорожного транспортного средства BFZ, SFZ,
3) для каждого анализируемого участка используется специфический для окружения алгоритм распознавания образца для распознавания объекта OBJ.
При этом в частности, возможно, и вычислительное/анализирующее устройство BAWE выполнено соответственно, чтобы при наличии движущегося объекте OBJ, напр., человека, животного, других движущихся навстречу или обгоняющих железнодорожных транспортных средств и пр., соотносились друг с другом анализируемые участки нескольких следующих друг за другом изображений BIFSB, BIGLB, чтобы распознавать и отслеживать движение для предварительного расчета возможного столкновения с объектом OBJ.
Помимо этого, предпочтительно возможно, и вычислительное/анализирующее устройство BAWE выполнено соответственно, чтобы на изображении BIFSB, BIGLB распознавалось, на каком расстоянии железнодорожное транспортное средство BFZ, SFZ находится от объекта OBJ, который был распознан на используемой колее FS, GL, при этом соотносятся друг с другом ширина пикселя колеи FS, GL в области BIB изображения и ширина пикселя колеи FS, GL в третьем участке BAS3 изображения, в котором находится объект OBJ, при этом упомянутое расстояние рассчитывается из этого отношения и полученной из известного третьего метаданного ширины колеи FS, GL.
С помощью описанного выше устройства BAV для анализа изображений возможно ассистирование или, соответственно, даже реализация автоматизированного (автономного) или с участием машиниста ведения железнодорожного транспортного средства BFZ или, соответственно, рельсового транспортного средства SFZ без дополнительной инфраструктуры по некоторому перегону следования. Это имеет место, в частности, тогда, когда устройство BAV для анализа изображений реализовано в виде виртуальной машины, которая выполнена и функционирует как «Software Defined Signal Recognition of Rail Traffic Systems» (англ. программно-определяемое распознавание сигналов систем железнодорожного транспорта).
Изобретение относится к средствам поддержки автоведения и ассистирования машинистам железнодорожных транспортных средств. В способе на базе нескольких, представляющих некоторую область (FSB, GLB) колеи/рельсового пути изображений (BIFSB, BIGLB) в некоторой созданной на каждом из этих изображениях области (BIB) изображения, в которой зарегистрированные применительно к графически изображенной области (FSB, GLB) колеи/рельсовые пути (FS, GL) лежат по существу в одном и том же месте, исходя из долей зарегистрированных колей/рельсовых путей в области (BIB) изображения, с помощью алгоритмов распознавания кромок распознают ход колеи/рельсового пути (FS, GL), который используется железнодорожным транспортным средством, по изменяющейся на зарегистрированном изображении доле изображения колеи/рельсового пути по отношению ко всему изображению и сравнивают с сохраненной в памяти известной метаинформацией (MI), причем эта метаинформация содержит как относящиеся к колее или, соответственно, относящиеся к рельсовому пути первичные метаданные, так и относящиеся к железнодорожному перегону или, соответственно, относящиеся к рельсовому перегону вторичные метаданные. Достигается возможность автоматизированного ведения железнодорожных транспортных средств без дополнительной инфраструктуры на перегоне следования. 3 н. и 23 з.п. ф-лы, 3 ил.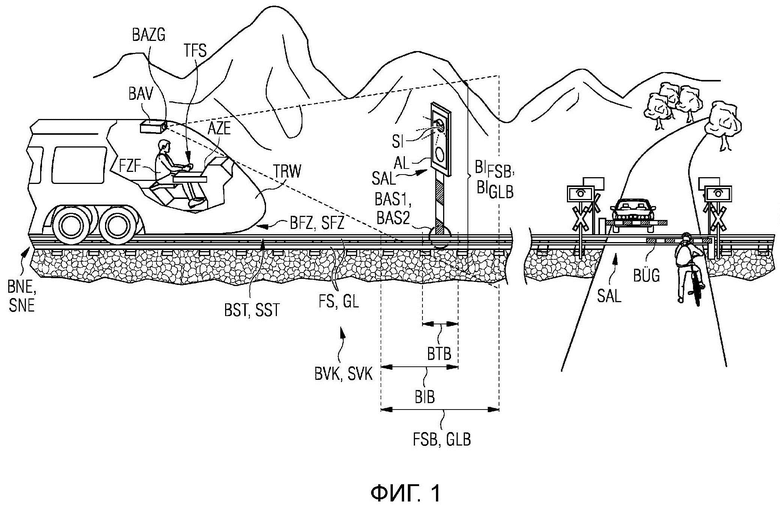
1. Способ анализа изображений на базе колеи в железнодорожном сообщении (BVK), в частности для анализа изображений на базе рельсового пути в рельсовом сообщении (SVK),
отличающийся тем, что
a) с железнодорожного транспортного средства (BFZ), в частности рельсового транспортного средства (SFZ), в частности из перспективы машиниста (FZF, TFS, TRW) моторвагона и/или из неподвижного, обеспечивающего видимость колеи положения в или на транспортном средстве (BFZ, SFZ), регистрируется множество представляющих область (FSB) колеи, в частности область (GLB) рельсового пути, изображений (BIFSB, BIGLB),
b) на каждом из изображений (BIFSB, BIGLB) содержится некоторая область (BIB) изображения, в которой применительно к графически изображенной области (FSB, GLB) колеи зарегистрированные колеи (FS), в частности рельсовые пути (GL), лежат по существу в одном и том же месте,
c) исходя из долей зарегистрированных колей (FS, GL), в области (BIB) изображения с помощью алгоритмов распознавания кромок распознается ход используемой железнодорожным транспортным средством (BFZ, SFZ) колеи (FS, GL) по изменяющейся на зарегистрированном изображении доле изображения колеи (FS, GL) по отношению ко всему зарегистрированному изображению и сравнивается с сохраненной в памяти известной графической метаинформацией (BMI), которая содержит относящиеся к колее (FS, GL) первичные метаданные, в частности расстояние между параллельно проходящими колеями (FS, GL), а также ширину головки колеи, в частности головки рельса, или/так и относящиеся к железнодорожному перегону (BST), в частности к рельсовому перегону (SST) вторичные метаданные, в частности в каких географических положениях или локальных координатах находятся установки на железнодорожном перегоне (BST, SST), так называемые путевые установки (SAL), такие как железнодорожные переезды, стрелки или подающие сигнал или направляющие установки.
2. Способ по п.1, отличающийся тем, что
на изображении (BIFSB, BIGLB) распознается, где находится путевая установка (SAL), при этом
a) для текущего найденного географического положения железнодорожного транспортного средства (BFZ, SFZ) на изображении (BIFSB, BIGLB) создается отдельная область (BIB) изображения, в которой может распознаваться однозначный признак установки, в частности сигнал (SI) сигнальной установки,
b) в отдельной области (BTB) изображения определяется первый участок (BAS1) изображения, через который ведет используемая железнодорожным транспортным средством (BFZ, SFZ) колея (FS, GL),
c) с помощью первого известного метаданного о расстоянии до путевой установки (SAL) вторичных метаданных в сохраненной в памяти графической метаинформации (BMI) находится, на каком расстоянии на базе ширины колеи (FS, GL) на участке (BAS1) изображения находится путевая установка (SAL) от колеи (FS, GL),
d) с помощью второго известного метаданного о наружных кромках путевой установки (SAL) вторичных метаданных в сохраненной в памяти графической метаинформации (BMI) и стандартного алгоритма распознавания кромок делается попытка распознать наружные кромки путевой установки (SAL) на найденном в c) расстоянии от колеи (FS, GL) до тех пор, пока известная и распознанная наружная кромка по существу не перекроются.
3. Способ по п.1 или 2, отличающийся тем, что
на изображении (BIFSB, BIGLB) распознается, в каком направлении, в частности НАЛЕВО, НАПРАВО или ПРЯМО, едет железнодорожное транспортное средство (BFZ, SFZ), при этом для колеи (FS, GL), распознанной по распознанному ходу,
a) путем линейного продолжения колеи (FS, GL), используемой в соответствии с областью (BIB) изображения железнодорожным транспортным средством (BFZ, SFZ), искусственно создается псевдо-колея ПРЯМО, в частности псевдо-рельсовый путь ПРЯМО,
b) эта псевдо-колея ПРЯМО сравнивается с используемой колеей (FS, GL) таким образом, чтобы
b1) было распознано направление ПРЯМО, когда сравненные колеи (FS, GL) идентичны,
b2) было распознано направление НАЛЕВО, в частности поворот НАЛЕВО, когда используемая колея (FS, GL) лежит слева от псевдо-колеи ПРЯМО,
b3) было распознано направление НАПРАВО, в частности поворот НАПРАВО, когда используемая колея (FS, GL) лежит справа от псевдо-колеи ПРЯМО.
4. Способ по п.3, отличающийся тем, что по расстоянию от используемой колеи (FS, GL) до псевдо-колеи ПРЯМО, а также до железнодорожного транспортного средства (BFZ, SFZ), которое рассчитывается из ширины колеи (FS, GL) в области (BIB) изображения и ширины колеи (FS, GL) в каждом указанном, релевантном для данного распознавания направления ПРЯМО, направления НАЛЕВО или направления НАПРАВО втором участке (BAS2) изображения, рассчитывалась степень кривизны направления /поворота НАЛЕВО или, соответственно, направления /поворота НАПРАВО.
5. Способ по одному из пп.1-4, отличающийся тем, что
на изображении (BIFSB, BIGLB) распознается, находится ли на используемой колее (FS, GL) по меньшей мере один объект (OBJ), предпочтительно человек, животное, движущийся или неподвижный предмет, при этом
a) характерный для человека размер человека и/или характерный для предмета размер движущегося предмета ставится в соотношение с известной шириной колеи (FS, GL), которая получается из третьего известного метаданного о ширине колеи (FS, GL) первичных метаданных в сохраненной в памяти графической метаинформации (BMI),
b) на изображении (BIFSB, BIGLB) используемая колея (FS, GL), а также критическая область, которая, напр., имеет ширину различного размера, в зависимости от окружения колеи (FS, GL), будь то сельская местность или город, слева и справа от используемой колеи (FS, GL), разделяются на несколько анализируемых участков при возрастающем расстоянии до железнодорожного транспортного средства (BFZ, SFZ),
c) для каждого анализируемого участка используется специфический для окружения алгоритм распознавания образца для распознавания объекта (OBJ).
6. Способ по п.5, отличающийся тем, что
при наличии движущегося объекта (OBJ), напр., движущегося человека, движущегося животного, других движущихся навстречу и обгоняющих железнодорожных транспортных средств и пр., соотносились друг с другом анализируемые участки нескольких следующих друг за другом изображений (BIFSB, BIGLB), чтобы распознавать и отслеживать движение для предварительного расчета возможного столкновения с объектом (OBJ).
7. Способ по п.5 или 6, отличающийся тем, что на изображении (BIFSB, BIGLB) распознается, на каком расстоянии железнодорожное транспортное средство (BFZ, SFZ) находится от объекта (OBJ), который был распознан на используемой колее (FS, GL), при этом соотносятся друг с другом ширина пикселя колеи (FS, GL) в области (BIB) изображения и ширина пикселя колеи (FS, GL) в третьем участке (BAS3) изображения, в котором находится объект (OBJ), при этом упомянутое расстояние рассчитывается из этого отношения и полученной из известного третьего метаданного ширины колеи (FS, GL).
8. Способ по одному из пп.1-7, отличающийся тем, что
на изображении (BIFSB, BIGLB) распознается, находится ли на используемой колее (FS, GL) железнодорожного перегона (BST, SST) по меньшей мере один посторонний объект (OBJ), при этом
a) распознать ход используемой железнодорожным транспортным средством (BFZ, SFZ) колеи (FS, GL) с помощью алгоритма распознавания кромок не удается или
b) распознавание нарушений закономерности по упорядоченным образцам, которые образуются балкой колеи (FS) или, соответственно, балкой рельсового пути между параллельно проходящими рельсовыми путями (GL), выполняется таким образом, что при распознавании нарушения закономерности, предпочтительно когда объект (OBJ), напр., веха или играющий ребенок, находится на используемой колее (FS, GL), это нарушение закономерности сравнивается с изображениями перегона, используемыми в качестве эталонной информации и ранее снятыми в процессах инициализации перегона следования.
9. Способ по одному из пп.1-8, отличающийся тем, что
изображения (BIFSB, BIGLB) снимаются несколькими приборами (BAZG) для записи изображений одинаковой конструкции, напр., видеокамерами, или различной конструкции, напр., видеокамерами, лазерными сенсорами, сенсорами на базе радара, основанными на беспроводной локации и измерении расстояния, инфракрасными камерами и/или тепловыми камерами для съемки изображений.
10. Способ по одному из пп.1-9, отличающийся тем, что
этим способом осуществляется ассистирование автоматизированному (автономному) или с участием машиниста ведению железнодорожного транспортного средства (BFZ, SFZ) без дополнительной инфраструктуры по некоторому перегону следования.
11. Устройство (BAV) для анализа изображений на базе колеи в железнодорожном сообщении (BVK), в частности для анализа изображений на базе рельсового пути в рельсовом сообщении (SVK),
отличающееся
a) по меньшей мере одним прибором (BAZG) для записи изображений, с помощью которого с железнодорожного транспортного средства (BFZ), в частности рельсового транспортного средства (SFZ), в частности из перспективы машиниста (FZF, TFS, TRW) моторвагона и/или из неподвижного, обеспечивающего видимость колеи положения в или на транспортном средстве (BFZ, SFZ), могут регистрироваться множество представляющих область (FSB) колеи, в частности область (GLB) рельсового пути, изображений (BIFSB, BIGLB) и запоминаться в устройстве (BSPE) для запоминания изображений,
b) вычислительным/анализирующим устройством (BAWE), которое, будучи соединено и функционально взаимодействуя с прибором (BAZG) для записи изображений и устройством (BSPE) для запоминания изображений, выполнено таким образом, в частности, имеет энергонезависимую, считываемую память (SP), в которой сохранены считываемые процессором команды управляющей программы управляющего анализом изображений на базе колеи программного модуля (PGM), и процессор (PZ), который выполняет команды управляющей программы программного модуля (PGM) для поддерживаемого вычислениями/аналитической оценкой анализа изображений на базе колеи, что на каждом из изображений (BIFSB, BIGLB) создается область (BIB) изображения, в которой применительно к графически изображенной области (FSB, GLB) зарегистрированные колеи (FS, GL) лежат по существу в одном и том же месте,
c) вычислительным/анализирующим устройством (BAWE), которое, будучи соединено и функционально взаимодействуя с информационным банком (IDB) данных, при этом предпочтительно оба, устройство (BSPE) для запоминания изображений и информационный банк (IDB) данных, интегрированы в виде конструктивного блока в одно общее запоминающее устройство, выполненно таким образом, что исходя из долей зарегистрированных колей (FS, GL), в области (BIB) изображения с помощью алгоритмов распознавания кромок распознается ход используемой железнодорожным транспортным средством (BFZ, SFZ) колеи (FS, GL) по изменяющейся на зарегистрированном изображении доле изображения колеи (FS, GL) по отношению ко всему зарегистрированному изображению, и сравнивается с сохраненной в информационном банке (IDB) данных известной графической метаинформацией (BMI), которая содержит как относящиеся к колее (FS, GL) первичные метаданные, в частности расстояние между параллельно проходящими колеями (FS, GL), так и относящиеся к ширине головки колеи, в частности головки рельса, а также к железнодорожному перегону (BST), в частности к рельсовому перегону (SST) вторичные метаданные, в частности в каких географических положениях или локальных координатах находятся установки на железнодорожном перегоне (BST, SST), так называемые путевые установки (SAL), такие как железнодорожные переезды, стрелки или подающие сигнал или направляющие установки.
12. Устройство (BAV) по п.11, отличающееся тем, что
вычислительное/анализирующее устройство (BAWE) выполнено таким образом, что на изображении (BIFSB, BIGLB) распознается, где находится путевая установка (SAL), при этом
a) для текущего найденного географического положения железнодорожного транспортного средства (BFZ, SFZ) на изображении (BIFSB, BIGLB) создается отдельная область (BIB) изображения, в которой может распознаваться однозначный признак установки, в частности сигнал (SI) сигнальной установки,
b) в этой отдельной области (BTB) изображения определяется первый участок (BAS1) изображения, через который ведет используемая железнодорожным транспортным средством (BFZ, SFZ) колея (FS, GL),
c) с помощью первого известного метаданного о расстоянии до путевой установки (SAL) вторичных метаданных в сохраненной в памяти графической метаинформации (BMI) находится, на каком расстоянии на базе ширины колеи (FS, GL) на участке (BAS1) изображения находится путевая установка (SAL) от колеи (FS, GL),
d) с помощью второго известного метаданного о наружных кромках путевой установки (SAL) вторичных метаданных в сохраненной в памяти графической метаинформации (BMI) и стандартного алгоритма распознавания кромок делается попытка распознать наружные кромки путевой установки (SAL) на найденном в c) расстоянии от колеи (FS, GL) до тех пор, пока известная и распознанная наружная кромка по существу не перекроются.
13. Устройство (BAV) по п.11 или 12, отличающееся тем, что
вычислительное/анализирующее устройство (BAWE) выполнено таким образом, что на изображении (BIFSB, BIGLB) распознается, в каком направлении, в частности НАЛЕВО, НАПРАВО или ПРЯМО, едет железнодорожное транспортное средство (BFZ, SFZ), при этом для колеи (FS, GL), распознанной по распознанному ходу,
a) путем линейного продолжения колеи (FS, GL), используемой в соответствии с областью (BIB) изображения железнодорожным транспортным средством (BFZ, SFZ), искусственно создается псевдо-колея ПРЯМО, в частности псевдо-рельсовый путь ПРЯМО,
b) эта псевдо-колея ПРЯМО сравнивается с используемой колеей (FS, GL) таким образом, чтобы
b1) было распознано направление ПРЯМО, когда сравненные колеи (FS, GL) идентичны,
b2) было распознано направление НАЛЕВО, в частности поворот НАЛЕВО, когда используемая колея (FS, GL) лежит слева от псевдо-колеи ПРЯМО,
b3) было распознано направление НАПРАВО, в частности поворот НАПРАВО, когда используемая колея (FS, GL) лежит справа от псевдо-колеи ПРЯМО.
14. Устройство (BAV) по п.13, отличающееся тем, что
вычислительное/анализирующее устройство (BAWE) выполнено таким образом, что по расстоянию от используемой колеи (FS, GL) до псевдо-колеи ПРЯМО, а также до железнодорожного транспортного средства (BFZ, SFZ), которое рассчитывается из ширины колеи (FS, GL) в области (BIB) изображения и ширины колеи (FS, GL) в каждом указанном, релевантном для конкретного распознавания направления ПРЯМО, направления НАЛЕВО или направления НАПРАВО втором участке (BAS2) изображения, рассчитывается степень кривизны направления/поворота НАЛЕВО или, соответственно, направления/поворота НАПРАВО.
15. Устройство (BAV) по одному из пп.11-14, отличающееся тем, что
вычислительное/анализирующее устройство (BAWE) выполнено таким образом, что на изображении (BIFSB, BIGLB) распознается, находится ли на используемой колее (FS, GL) по меньшей мере один объект (OBJ), предпочтительно человек, животное, движущийся или неподвижный предмет, при этом
a) характерный для человека размер человека и/или характерный для предмета размер движущегося предмета ставится в соотношение с известной шириной колеи (FS, GL), которая получается из третьего известного метаданного о ширине колеи (FS, GL) первичных метаданных в сохраненной в памяти графической метаинформации (BMI),
b) на изображении (BIFSB, BIGLB) используемая колея (FS, GL), а также критическая область, которая, напр., имеет ширину различного размера, в зависимости от окружения колеи (FS, GL), будь то сельская местность или город, слева и справа от используемой колеи (FS, GL), разделяются на несколько анализируемых участков при возрастающем расстоянии до железнодорожного транспортного средства (BFZ, SFZ),
c) для каждого анализируемого участка используется специфический для окружения алгоритм распознавания образца для распознавания объекта (OBJ).
16. Устройство (BAV) по п.15, отличающееся тем, что
вычислительное/анализирующее устройство (BAWE) выполнено таким образом, что при наличии движущегося объекта (OBJ), напр., движущегося человека, движущегося животного, других движущихся навстречу и обгоняющих железнодорожных транспортных средств и пр., соотносились друг с другом анализируемые участки нескольких следующих друг за другом изображений (BIFSB, BIGLB), чтобы распознавать и отслеживать движение для предварительного расчета возможного столкновения с объектом (OBJ).
17. Устройство (BAV) по п.15 или 16, отличающееся тем, что
вычислительное/анализирующее устройство (BAWE) выполнено таким образом, что на изображении (BIFSB, BIGLB) распознается, на каком расстоянии железнодорожное транспортное средство (BFZ, SFZ) находится от объекта (OBJ), который был распознан на используемой колее (FS, GL), при этом
соотносятся друг с другом ширина пикселя колеи (FS, GL) в области (BIB) изображения и ширина пикселя колеи (FS, GL) в третьем участке (BAS3) изображения, в котором находится объект (OBJ), при этом упомянутое расстояние рассчитывается из этого отношения и полученной из известного третьего метаданного ширины колеи (FS, GL).
18. Устройство (BAV) по одному из пп.11-17, отличающееся тем, что
вычислительное/анализирующее устройство (BAWE) выполнено таким образом, что на изображении (BIFSB, BIGLB) распознается, находится ли на используемой колее (FS, GL) железнодорожного перегона (BST, SST) по меньшей мере один посторонний объект (OBJ), при этом
a) распознать ход используемой железнодорожным транспортным средством (BFZ, SFZ) колеи (FS, GL) с помощью алгоритма распознавания кромок не удается или
b) распознавание нарушений закономерности по упорядоченным образцам, которые образуются балкой колеи (FS) или, соответственно, балкой рельсового пути между параллельно проходящими рельсовыми путями (GL), выполняется таким образом, что при распознавании нарушения закономерности, предпочтительно когда объект (OBJ), напр., веха или играющий ребенок, находится на используемой колее (FS, GL), это нарушение закономерности сравнивается с изображениями перегона, используемыми в качестве эталонной информации и ранее снятыми в процессах инициализации перегона следования.
19. Устройство (BAV) по одному из пп.11-18, отличающееся тем, что
содержатся несколько приборов (BAZG) для записи изображений одинаковой конструкции, напр., несколько видеокамер, или различной конструкции, напр., несколько видеокамер, лазерных сенсоров, сенсоров на базе радара, основанных на беспроводной локации и измерении расстояния, инфракрасных камер и/или тепловых камер для съемки изображений, которые снимают изображения (BIFSB, BIGLB).
20. Устройство (BAV) по одному из пп.11-19, отличающееся тем, что
прибор (BAZG) для записи изображений выполнен с возможностью поворота.
21. Устройство (BAV) по одному из пп.11-20, отличающееся тем, что
прибор (BAZG) для записи изображений имеет корректирующий компонент (KOK), который приобщает к аналитической оценке графического материала данные о погоде и освещенности.
22. Устройство (BAV) по одному из пп.11-21, отличающееся тем, что
прибор (BAZG) для записи изображений имеет компонент (BVK) изменения фокусного расстояния, который, в зависимости от расстояния до колеи (FS, GL), выбирает правильный угол съемки, чтобы таким образом оптимально поддерживать многократную аналитическую оценку.
23. Устройство (BAV) по одному из пп.11-22, отличающееся тем, что
прибор (BAZG) для записи изображений имеет компонент (BLK) освещения, в частности прожектор, который работает в пределах или вне видимой человеку области.
24. Устройство (BAV) по одному из пп.11-23, отличающееся
виртуальной машиной, которая выполнена и функционирует как «Software Defined Signal Recognition of Rail Traffic Systems» - программно-определяемое распознавание сигналов систем железнодорожного транспорта.
25. Устройство (BAV) по одному из пп.11-24, отличающееся тем, что
с помощью устройства (BAV) возможно ассистирование автоматизированному (автономному) или с участием машиниста ведению железнодорожного транспортного средства (BFZ, SFZ) без дополнительной инфраструктуры по некоторому перегону следования.
26. Железнодорожное транспортное средство (BFZ) для анализа изображений на базе колеи в железнодорожном сообщении (BVK), в частности для анализа изображений на базе рельсового пути в рельсовом сообщении (SVK), отличающееся тем, что
устройство (BAV) для анализа изображений на базе колеи или, соответственно, для анализа изображений на базе рельсового пути, по одному из пп.11-25 интегрировано в железнодорожное транспортное средство (BFZ, SFZ).
| DE 102006007788A1, 30.08.2007 | |||
| Способ определения минимально достаточного размера бина для размещения источников и приемников при проведении сейсмической съемки | 2021 |
|
RU2779518C1 |
| DE 102014217954 A1, 10.03.2016 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| CN 105701844 A, 22.06.2016. | |||

