Изобретение касается способа распознавания опасных ситуаций в железнодорожном сообщении, в частности в рельсовом сообщении, согласно ограничительной части п.1 формулы изобретения, устройства для распознавания опасных ситуаций в железнодорожном сообщении, в частности в рельсовом сообщении, согласно ограничительной части п.11 формулы изобретения и железнодорожного транспортного средства для распознавания опасных ситуаций в железнодорожном сообщении, в частности рельсового транспортного средства для распознавания опасных ситуаций в рельсовом сообщении, согласно ограничительной части п.26 формулы изобретения.
Железнодорожные транспортные средства, как составная часть современной транспортной инфраструктуры, представляют собой колейные средства сообщения и транспорта, которые передвигаются, например, катясь по или под одним или двумя направляющими рельсами (рельсовыми путями), паря над или под магнитным полем или вися на стальных тросах. Из названных колейных средств сообщения и транспорта наиболее широко распространены рельсовые транспортные средства, которые базируются на колесно-рельсовой системе, которые либо (имеют) собственный привод ходовой части (моторвагон), либо тянутся или перемещаются локомотивом, и у которых преимущественно стальные колеса, имеющие гребень бандажа, направляются по двум стальным рельсам или, соответственно, рельсовым путям.
Лежащая в основе изобретения задача заключается в том, чтобы предложить способ, устройство и железнодорожное транспортное средство, в частности рельсовое транспортное средство, для автоматического распознавания опасных ситуаций в железнодорожном сообщении, в частности в рельсовом сообщении, с помощью которого автоматически распознаются опасные ситуации в железнодорожном сообщении, когда железнодорожные транспортные средства находятся в пути на железнодорожных перегонах в железнодорожной сети, или, соответственно, опасные ситуации в рельсовом сообщении, когда рельсовые транспортные средства находятся в пути на рельсовых перегонах в рельсовой сети.
Автоматическое распознавание опасных ситуаций в железнодорожном сообщении, в частности в рельсовом сообщении, что является предметом настоящей международной заявки на патент (заявка № PCT/…; публикация № WO…) и обосновывающей ее приоритет заявки на патент DE (заявка №102016224358.6), с учетом будущего автоматизированного (автономного) или с участием машиниста ведения железнодорожных транспортных средств в железнодорожном сообщении или, соответственно, рельсовых транспортных средств в рельсовом сообщении является безусловной НЕОБХОДИМОСТЬЮ.
Так, для автоматизированного или с участием машиниста ведения рельсовых транспортных средств необходимо распознавать опасные ситуации на перронах, или в области железнодорожных переездов или в аналогичных областях (далее «опасные ситуации на перронах или т.п.) и в такой опасной ситуации поступать соответственно эксплуатационным правилам, напр., издавая предупредительный звук, подавая акустический или визуальный предупредительный знак.
Но не только аспект автоматического распознавания опасных ситуаций имеет значение для будущего автоматизированного (автономного) или с участием машиниста ведения, но и последующие технические аспекты, все которые в большей или меньшей степени находятся в техническом контексте с настоящей заявкой на патент и поэтому приведены, и в связи с этим их содержания должны учитываться и при необх. даже включаться в нее.
Речь идет о следующих аспектах:
1) Автоматизированное распознавание сигналов в железнодорожном/рельсовом сообщении в соответствии с международной заявкой на патент (заявка № PCT/EP2016/057804; публикация № WO 2017/174155 A1) и раскрытой в ней технической теорией.
2) Автоматическое распознавание колей/рельсовых путей в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка № 102016224335.7) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
3) Автоматическое распознавание препятствий в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка № 102016224344.6) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
4) Альтернативное определение положений в рельсовом сообщении, когда традиционное определение положений со спутниковой поддержкой не срабатывает или является недостаточным, в соответствии с заявкой на патент DE (заявка № 102016224355.1) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
5) Выполнение анализа изображений на базе колеи/рельсового пути в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка № 102016224331.4) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
Вышеназванная контекстовая задача решается, исходя из определенного в ограничительной части п.1 формулы изобретения способа распознавания опасных ситуаций с помощью признаков, указанных в отличительной части п.1 формулы изобретения.
Помимо этого, вышеназванная контекстовая задача решается, исходя из определенного в ограничительной части п.11 формулы изобретения устройства для распознавания опасных ситуаций с помощью признаков, указанных в отличительной части п.11 формулы изобретения.
Далее, вышеназванная контекстовая задача решается, исходя из определенного в ограничительной части п.26 формулы изобретения железнодорожного транспортного средства, в частности рельсового транспортного средства, с помощью признаков, указанных в отличительной части п.26 формулы изобретения.
Идея, лежащая в основе изобретения по независимым пп.1, 11 и 26 формулы изобретения, заключается в том, чтобы на базе нескольких изображений некоторой опасной области, известной в отношении ее локальных координат и по потенциальным опасным ситуациям в железнодорожном сообщении, частично расположенной вдоль железнодорожного перегона железнодорожной сети, в маркированной на каждом из изображений области изображения, на которой показана некоторая отдельная область графически изображенной опасной области, которая расценивается как особенно критическая, путем сравнения образцов проверялось, находятся ли в критической отдельной области люди и/или движущиеся предметы.
Помимо этого, по пп.2 и 12 формулы изобретения предпочтительно, когда
дополнительно на базе нескольких, представляющих критическую отдельную область изображений осуществляется перерасчет на одинаковый размер изображений и изображений отдельной области с учетом соответствующего расстояния до опасной области, рассчитывается индекс активности путем распознавания движений людей и/или предметов в опасной области и
рассчитанный индекс активности сравнивается с сохраненным в памяти пороговым значением.
При этом основным принципом изобретения является распознавать опасные ситуации в известных опасных областях железнодорожного сообщения, напр., на перронах в области вокзала, снабженных шлагбаумом или не снабженных шлагбаумом железнодорожных переездах или тому подобных, путем итеративного анализа изображений в комбинации с известными метаданными об опасных областях, таких как, напр., перроны, железнодорожные переезды и пр.
При этом целью в каждом случае является сделать возможным вклад в полностью автоматизированное ведение без дополнительных инвестиций в инфраструктуру перегона.
Автоматизированное распознавание опасных ситуаций в опасных областях железнодорожного сообщения, напр., на перронах в области вокзала, снабженных шлагбаумом или не снабженных шлагбаумом железнодорожных переездах или тому подобных, может предпочтительным образом по меньшей мере частично достигаться с помощью следующих шагов:
1. В первом шаге при въезде в область вокзала, имеющую перроны, или приближении к железнодорожному переезду [железнодорожному транспортному средству/рельсовому транспортному средству известны связанные с этим локальные координаты на базе данных GPS или данных определения положения в соответствии с заявкой на патент DE (заявка № 102016224355.1) и международной заявкой на патент (заявка № PCT/…; публикация № WO …), которые находятся в соответствии с раскрытой в каждой из них технической теорией] с помощью по меньшей мере одного прибора для записи изображений/для сбора изображений (напр., одного или нескольких приборов, таких как видеокамеры, лазерные сенсоры, тепловые камеры для съемки изображений, радар, другие приборы для сбора изображений и пр.) с железнодорожного транспортного средства, напр., из перспективы машиниста моторвагона, регистрируется или, соответственно, снимается множество изображений.
Многократное осуществление релевантно, прежде всего, для целей редундантности.
a. Но в одной из модификаций или усовершенствований, дополнений изобретения могут также применяться изображения от нескольких приборов для записи изображений или, соответственно, приборов для сбора изображений одинакового вида (напр., две видеокамеры) для взаимной валидации и синтеза результатов.
b. В другой модификации или усовершенствовании, дополнении изобретения могут также применяться изображения от нескольких приборов для записи изображений или, соответственно, приборов для сбора изображений различного вида (напр., видеокамера и тепловая камера для съемки изображений) для взаимной валидации и синтеза результатов.
2. Во втором шаге на каждом изображении маркируется некоторая область изображения, которая показывает особенно критическую (высококритическую) область (напр., в случае перрона область между кромкой перрона и ограниченной белой линией полосой безопасности, удаленная прибл. на 2 м от кромки перрона) опасной области.
Вариант 1: Эти области известны из более ранних поездок с целью инициализации, для каждой из которых на каждое положение железнодорожного транспортного средства/рельсового транспортного средства в области вокзала были маркированы (высококритические) особенно критические области опасных областей (если делают изображение дважды с одного и того же места при въезде в область вокзала, имеющую перрон, то критическая область остается всегда одной и той же). В этой связи ссылаемся на автоматическое распознавание сигналов в железнодорожном/рельсовом сообщении в соответствии с международной заявкой на патент (заявка № PCT/EP2016/057804; публикация № WO 2017/174155 A1) и раскрытой в ней технической теорией, где сравнимым образом поступают в отношении распознавания сигналов.
Вариант 2. Сначала распознается колея следования/рельсовый путь следования. Исходя из колеи следования/рельсового пути следования, распознается кромка перрона как край опасной области, а также расстояние от транспортного средства до перрона или, соответственно, опасной области и, наконец, (высококритическая) особенно критическая область относительно кромки перрона или, соответственно, края опасной области. В этой связи ссылаемся на выполнение анализа изображений на базе колеи/рельсового пути в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка №102016224331.4) и международной заявкой на патент (заявка № PCT/…; публикация № WO…) и раскрытой в каждой из них технической теорией.
3. В третьем шаге на базе полученных изображений высококритической области проверяется, находятся ли в ней предпочтительно люди и/или движущиеся предметы. Это происходит путем сравнения образцов (согласования паттернов).
Если в высококритической области находятся люди и/или движущиеся предметы, должен подаваться акустический сигнал.
Случай 1: применяется положительное согласование, т.е. распознаются люди и/или движущиеся предметы.
Случай 2: применяется отрицательное согласование, т.е. распознаются временные изменения в структуре опасной области, тогда проверяется, напр., прерывание закономернного образца перрона (напр., каменные плитки, белая линия).
4. В четвертом шаге дополнительно для (высококритической) особенно критической отдельной области опасной области через короткие интервалы времени снимаются несколько изображений.
После этого осуществляется перерасчет этих изображений на одинаковый размер с учетом соответствующего расстояния до перрона или, соответственно, до края опасной области. После этого рассчитывается индекс активности путем распознавания движений людей и/или движущихся предметов на перроне (напр., играющие или озорничающие дети). Если этот индекс активности превышает некоторое пороговое значение, то следует поступать соответственно эксплуатационным правилам, напр., издавая/подавая предупредительный звук (напр., свисток), акустический или визуальный предупредительный знак.
С помощью намеченного выше итеративного анализа изображений опасных областей в железнодорожном сообщении/рельсовом сообщении, напр., на перронах в области вокзала, снабженных шлагбаумом или не снабженных шлагбаумом железнодорожных переездах или тому подобных, в сочетании с метаданными об этих опасных областях может достигаться, что:
- распознаются люди и/или движущиеся предметы в (высококритической) особенно критической отдельной области опасной области, и могут предприниматься реакции соответственно эксплуатационным правилам, напр., издавание/подача предупредительного звука (напр., свистка), акустического или визуального предупредительного знака;
- распознаются люди и/или движущиеся предметы, имеющие слишком высокую скорость движения (напр., озорничающие дети) в (высококритической) особенно критической отдельной области опасной области и могут предприниматься реакции соответственно эксплуатационным правилам, напр., подача предупредительного свистка, предупредительного сигнала и пр.;
- при неблагоприятных условиях видимости люди могут распознаваться надежнее, чем машинистами моторвагона;
- машинисты моторвагона больше не нужны для распознавания опасных ситуаций или тому подобного, так что ведение возможно независимо от их наличия.
В ходе одного из предпочтительных усовершенствований изобретения применительно к устройству для распознавания опасных ситуаций по п.11 формулы изобретения могут также применяться следующие дополнительные компоненты a)-c) для прибора для записи изображений (напр., прибор для сбора изображений):
a. Корректирующий компонент по п.21 формулы изобретения, который приобщает данные о погоде и освещенности для аналитической оценки графического материала. При этом, например, при сильном тумане, аналитическая оценка видеоизображений может ограничиваться первыми 50 метрами перед железнодорожным транспортным средством или, соответственно, рельсовым транспортным средством, и соответственно дросселироваться скорость транспортного средства.
b. Компонент изменения фокусного расстояния по п.22 формулы изобретения, который, в зависимости от окружения (напр., вокзал, городская зона, сельская местность и пр.) выбирает правильный угол съемки, чтобы таким образом оптимально поддерживать аналитическую оценку изображения. Например, тогда могут надлежащим образом обслуживаться как ситуации съемки на свободном перегоне (требуют изображений из большой удаленности, чтобы на основании скорости можно быть реагировать своевременно), так и ситуации съемки в области вокзала (требуют изображений, имеющих большую ширину). Помимо этого, с помощью компонента изменения фокусного расстояния в зависимости от расстояния до опасной области может выбираться правильный угол съемки, чтобы таким образом оптимально поддерживать многократную аналитическую оценку опасной области.
c. Компонент освещения по п.23 формулы изобретения, например, прожектор, который работает в пределах или вне видимой человеку области, с помощью которого улучшается качество графического материала, снимаемого прибором для записи изображений или, соответственно, прибором для сбора изображений ночью или при плохих погодных условиях.
Помимо этого, возможно, чтобы устройство GSVE для распознавания опасных ситуаций было выполнено и функционировало в виде виртуальной машины как «Software Defined Signal Recognition of Rail Traffic Systems» (англ. программно-определяемое распознавание сигналов систем железнодорожного транспорта).
Другие преимущества изобретения вытекают из последующего описания одного из примеров осуществления изобретения с помощью фиг.1-3. На них показано:
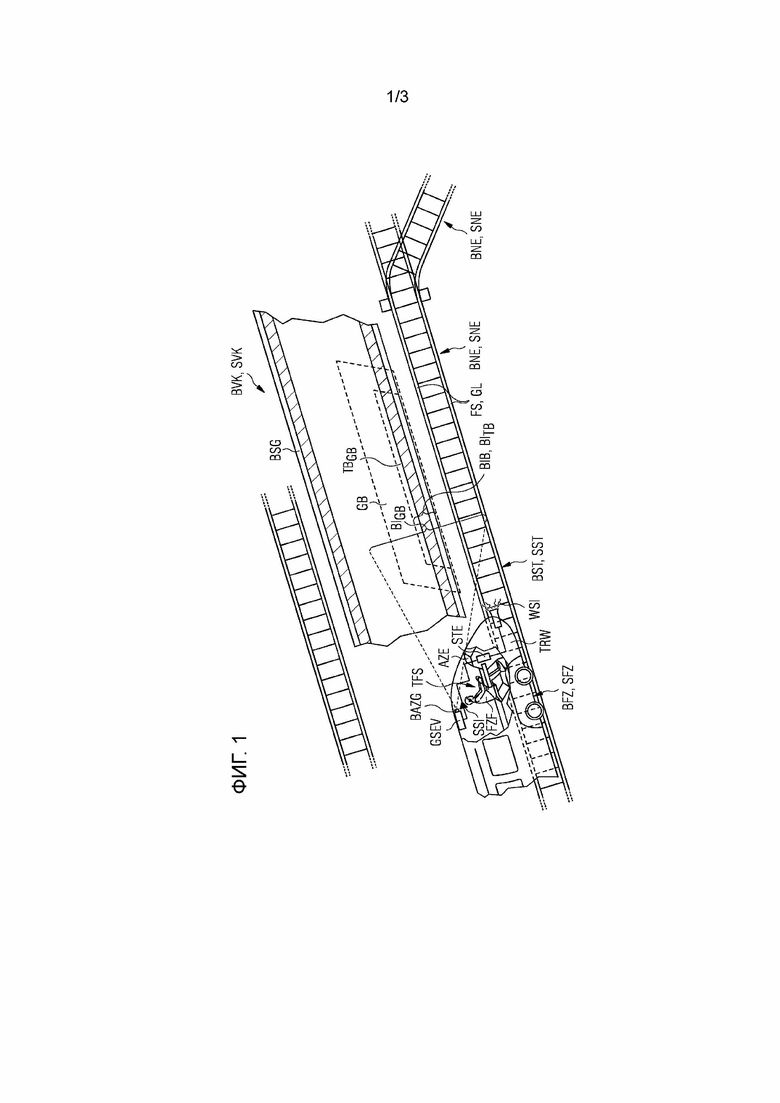
фиг.1: распознавание на базе железнодорожного транспортного средства опасной ситуации, когда железнодорожное транспортное средство приближается к перрону, как к критической в отношении возможных опасностей зоне;
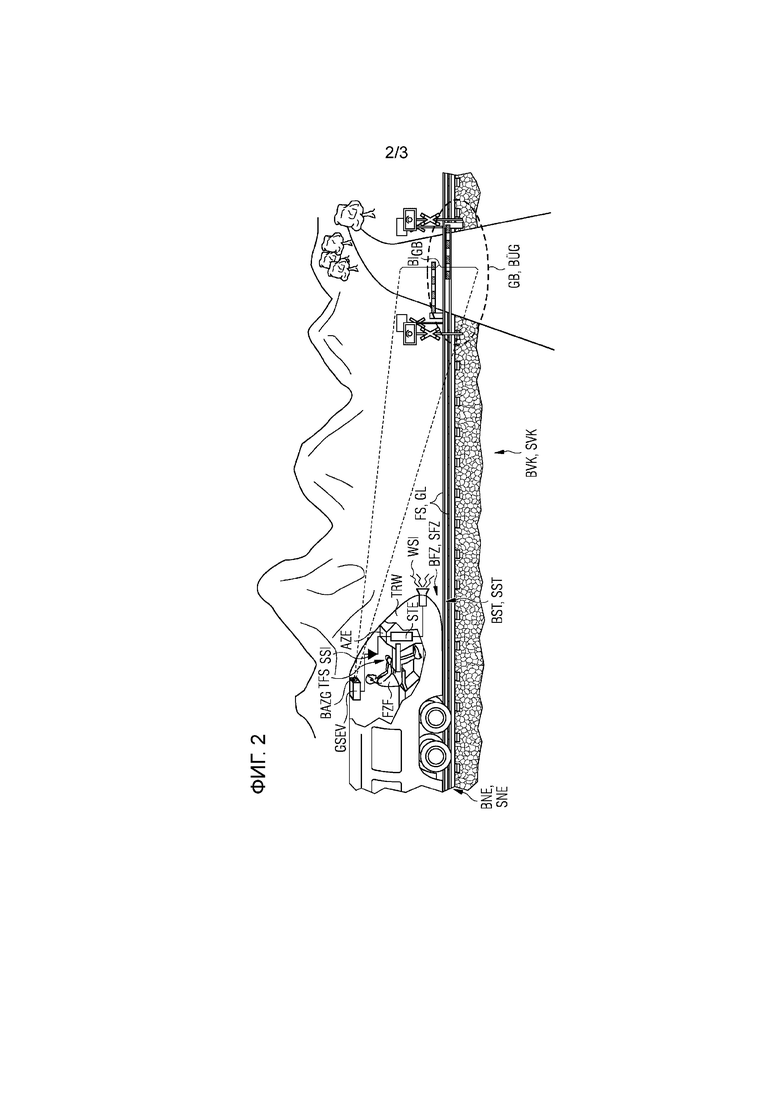
фиг.2: в соответствии со сценарием, показанным на фиг.1, распознавание на базе железнодорожного транспортного средства опасной ситуации, когда железнодорожное транспортное средство приближается к снабженному шлагбаумом железнодорожному переезду, как к критической в отношении возможных опасностей зоне;
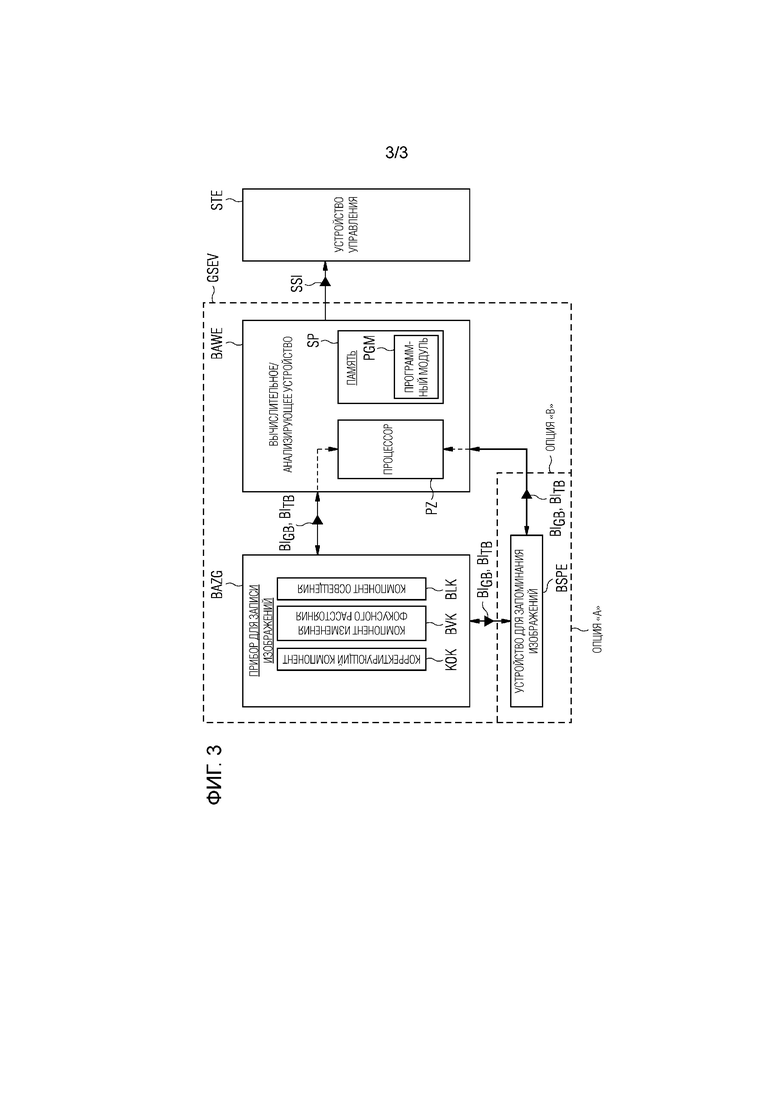
фиг.3: принципиальная конструкция устройства для распознавания опасных ситуаций для распознавания опасных ситуаций на базе железнодорожного транспортного средства в соответствии с фиг.1 и 2 у перрона и у железнодорожного переезда.
На фиг.1 показано распознавание на базе железнодорожного транспортного средства опасной ситуации в железнодорожном сообщении BVK, когда на изображенном отдельными участками железнодорожном перегоне BST железнодорожной сети BNE, напр., в окрестностях вокзала, железнодорожное транспортное средство BFZ приближается по колее FS железнодорожного перегона BST к перрону BSG как к критической в отношении возможных опасностей зоне.
По настоящему примеру осуществления отнесенный к колее железнодорожный перегон BST железнодорожной сети BNE представляет собой рельсовый перегон SST рельсовой сети SNE, на котором в рельсовом сообщении SVK для распознавания опасных ситуаций рельсовое транспортное средство SFZ находится в пути на рельсовом пути GL и приближается к перрону BSG. Вместо изображенного рельсового сообщения SVK с едущим по рельсовому перегону SST рельсовой сети SNE рельсовым транспортным средством SFZ, как уже рассматривалось, в качестве другого примера осуществления изобретения возможна и представима также любая другая, какая угодно система железнодорожного сообщения на базе ближнего или дальнего сообщения. Так, можно было бы вести речь также, напр., о системе сообщения подвесной дороги на магнитной подвеске (ключевое слово: Трансрапид, Маглев и пр.), имеющей соответственно сравнимую инфраструктуру, состоящую из железнодорожной сети, железнодорожного перегона и железнодорожного транспортного средства.
В изображенной на фиг.1 системе рельсового сообщения в моторвагоне TRW рельсового транспортного средства SFZ, имеющем пульт TFS машиниста моторвагона и интегрированное устройство AZE отображения, в котором находится рабочее место машиниста FZF транспортного средства, для распознавания на базе рельсового транспортного средства возможной опасной ситуации размещено устройство GSEV для распознавания опасных ситуаций. Для этого устройство GSEV для распознавания опасных ситуаций включает в себя прибор BAZG для записи изображений, который выполнен, напр., в виде обычной видеокамеры, лазерного сенсора, тепловой камеры для съемки изображений, радарного устройства, инфракрасной камеры и пр., и в связи со сбором изображений называется также прибором для сбора изображений.
С помощью прибора BAZG для записи изображений, когда едущее по рельсовому пути GL рельсовое транспортное средство SFZ приближается к перрону BSG, как к критической в отношении возможных опасностей зоне, с рельсового транспортного средства SFZ, напр., из перспективы машиниста FZF моторвагона на пульте TFS машиниста моторвагона TRW и/или из неподвижного, обеспечивающего видимость колеи положения в или на транспортном средстве SFZ, может регистрироваться множество изображений BIGB некоторой опасной области GB, известной в отношении ее локальных координат и по потенциальным опасным ситуациям в рельсовом сообщении SVK, частично расположенной вдоль рельсового перегона SST рельсовой сети SNE,, представляющих эту опасную область GB. Другими словами: прибор BAZG для записи изображений получает в качестве входных величин информацию (напр., в виде метаданных) о потенциальных опасных ситуациях/опасных местах в рельсовом сообщении SVK и соответствующие ей локальные координаты и выдает после/вследствие соответствующего срабатывания (установки триггера) к этим входным величинам представляющие опасную область GB изображения BIGB в качестве выходных величин. В изображенном на фиг.1 случае зарегистрированная прибором BAZG для записи изображений опасная область GB является частью перрона BSG. Разумеется, возможно также, чтобы опасная область GB включала в себя весь перрон BSG.
В изображениях BIGB опасной области GB содержится некоторая область BIB изображения, показывающая некоторую отдельную область TBGB графически изображенной опасной области GB, которая расценивается как особенно критическая в отношении возможных опасностей. В случае перрона BSG эта особенно критическая область предпочтительно представляет собой площадь между кромкой перрона и ограниченной белой линией полосой безопасности, которая находится в удалении прибл. в 2 метра от кромки перрона. Это высококритическая часть опасной области GB. С помощью прибора BAZG для записи изображений, помимо этого, когда едущее по рельсовому пути GL рельсовое транспортное средство SFZ приближается к перрону BSG, как к критической в отношении возможных опасностей зоне, регистрируются также множество изображений BITB, представляющих критическую отдельную область TBGB как высококритическую часть опасной области GB.
Как теперь на основании изображений BIGB опасной области GB и/или изображений BITB (особенно) критической отдельной области TBGB выполняется распознавание опасной ситуации, поясняется позднее в связи с описанием фиг.3.
Однако, если независимо от того, каким образом распознается опасная ситуация устройством GSEV для распознавания опасных ситуаций, распознается опасная ситуация на перроне BSG, напр., (двигающиеся) люди и/или движущиеся предметы в опасной области GB, и/или (двигающиеся) люди и/или движущиеся предметы в особенно критической (высококритической) отдельной области TBGB опасной области GB, то устройством GSEV для распознавания опасных ситуаций передается управляющий сигнал SSI устройству STE управления в моторвагоне TRW рельсового транспортного средства SFZ, после чего тогда моторвагоном TRW подается предупредительный сигнал WSI. Этот предупредительный сигнал WSI представляет собой, например, предупредительный звук (напр., свисток), акустический предупредительный знак или визуальный предупредительный знак, который отображает реакцию соответственно эксплуатационным правилам в рельсовом сообщении SVK.
На фиг.2 показано распознавание на базе железнодорожного транспортного средства опасной ситуации в железнодорожном сообщении BVK, когда на изображенном отдельными участками железнодорожном перегоне BST железнодорожной сети BNE железнодорожное транспортное средство BFZ приближается по колее FS железнодорожного перегона BST к перрону BSG, как к критической в отношении возможных опасностей зоне.
Отнесенный к колее железнодорожный перегон BST железнодорожной сети BNE и здесь снова представляет собой рельсовый перегон SST рельсовой сети SNE, на котором в рельсовом сообщении SVK для распознавания опасных ситуаций рельсовое транспортное средство SFZ находится в пути на рельсовом пути GL и приближается к перрону BSG. Вместо изображенного рельсового сообщения SVK с едущим по рельсовому перегону SST рельсовой сети SNE рельсовым транспортным средством SFZ и здесь снова, как уже рассматривалось, в качестве другого примера осуществления изобретения возможна и представима также любая другая, какая угодно система железнодорожного сообщения на базе ближнего или дальнего сообщения. Так, можно было бы вести речь также, напр., о системе сообщения подвесной дороги на магнитной подвеске (ключевое слово: Трансрапид, Маглев и пр.), имеющей соответственно сравнимую инфраструктуру, состоящую из железнодорожной сети, железнодорожного перегона и железнодорожного транспортного средства.
В изображенной на фиг.2 системе рельсового сообщения и здесь снова в моторвагоне TRW рельсового транспортного средства SFZ, имеющем пульт TFS машиниста моторвагона и интегрированное устройство AZE отображения, в котором находится рабочее место машиниста FZF транспортного средства, для распознавания на базе рельсового пути возможной опасной ситуации размещено устройство GSEV для распознавания опасных ситуаций. Для этого устройство GSEV для распознавания опасных ситуаций снова содержит прибор BAZG для записи изображений, который выполнен, напр., в виде обычной видеокамеры, лазерного сенсора, тепловой камеры для съемки изображений, радарного устройства, инфракрасной камеры и пр.
С помощью прибора BAZG для записи изображений, когда едущее по рельсовому пути GL рельсовое транспортное средство SFZ приближается к снабженному шлагбаумом железнодорожному переезду BÜG, как к критической в отношении возможных опасностей зоне, с рельсового транспортного средства SFZ, напр., из перспективы машиниста FZF моторвагона на пульте TFS машиниста моторвагона TRW и/или из неподвижного, обеспечивающего видимость колеи положения в или на транспортном средстве SFZ, может регистрироваться множество изображений BIGB некоторой опасной области GB, известной в отношении ее локальных координат и по потенциальным опасным ситуациям в рельсовом сообщении SVK, частично расположенной вдоль рельсового перегона SST рельсовой сети SNE, представляющих эту опасную область GB. Другими словами: прибор BAZG для записи изображений получает в качестве входных величин информацию (напр., в виде метаданных) о потенциальных опасных ситуациях/опасных местах в рельсовом сообщении SVK и соответствующие ей локальные координаты и выдает после/вследствие соответствующего срабатывания (установки триггера) к этим входным величинам представляющие опасную область GB изображения BIGB в качестве выходных величин. В изображенном на фиг.2 случае зарегистрированная прибором BAZG для записи изображений опасная область GB включает в себя весь снабженный шлагбаумом железнодорожный переезд BÜG.
Когда устройством GSEV для распознавания опасных ситуаций распознается опасная ситуация у снабженного шлагбаумом железнодорожного переезда BÜG, напр., (двигающиеся) люди или движущиеся предметы в опасной области GB, то устройством GSEV для распознавания опасных ситуаций снова передается управляющий сигнал SSI устройству STE управления в моторвагоне TRW рельсового транспортного средства SFZ, после чего тогда моторвагоном TRW подается предупредительный сигнал WSI. Этот предупредительный сигнал WSI может, например, снова представлять собой предупредительный звук (напр., свисток), акустический предупредительный знак или визуальный предупредительный знак, который отображает реакцию соответственно эксплуатационным правилам в рельсовом сообщении SVK.
На фиг.3 показана принципиальная конструкция устройства GSEV для распознавания опасных ситуаций для распознавания в соответствии с фиг.1 и 2 на базе железнодорожного транспортного средства опасных ситуаций у перрона BSG и у железнодорожного переезда BÜG.
При этом исходной точкой для распознавания опасных ситуаций, в соответствии с рассуждениями к фиг.1 и 2, является прибор BAZG для записи изображений, который при соответствующем импульсе или, соответственно, триггере (сравн. рассуждения при описании фиг.1) регистрирует изображения BIGB опасной области GB и/или изображения BITB отдельной области TBGB для распознавания опасных ситуаций. Как этот импульс или, соответственно, триггер создается и подводится к прибору BAZG для записи изображений, не является предметом настоящей заявки.
Для этого прибор BAZG для записи изображений предпочтительно выполнен с возможностью поворота для ориентации на объект изображения.
Далее, возможно и при определенных обстоятельствах также по техническим причинам, связанным с регистрацией, целесообразно, чтобы в устройстве GSEV для распознавания опасных ситуаций содержались несколько приборов BAZG для записи изображений одинаковой конструкции, напр., несколько видеокамер, или приборов различной конструкции, напр., несколько видеокамер, лазерных сенсоров, сенсоров на базе радара, основанных на беспроводной локации и измерении расстояния, инфракрасных камер и/или тепловых камер для съемки изображений, которые снимают изображения BIGB, BITG. Такое многократное осуществление записи изображений или, соответственно, сбора изображений релевантно, в прежде всего, для целей редундантности.
Для дополнительного улучшения качества изображений, записываемых или собираемых с помощью прибора BAZG для записи изображений, в приборе BAZG для записи изображений предпочтительно содержатся следующие компоненты:
1. Корректирующий компонент KOK, с помощью которого для аналитической оценки графического материала приобщаются данные о погоде и освещенности. С помощью этого компонента можно, напр., при сильном тумане, ограничивать аналитическую оценку видеоизображений первыми 50 метрами перед рельсовым транспортным средством и соответственно дросселировать скорость рельсового транспортного средства.
2. Компонент BVK изменения фокусного расстояния, который, в зависимости от окружения (напр., вокзал, городская зона, сельская местность и пр.) выбирает правильный угол съемки, чтобы таким образом оптимально поддерживать аналитическую оценку изображения. Благодаря этому тогда могут надлежащим образом обслуживаться как ситуации съемки на свободном перегоне (требуют изображений из большой удаленности, чтобы на основании скорости можно быть реагировать своевременно), так и ситуации съемки в области вокзала (требуют изображений, имеющих большую ширину). Помимо этого, с помощью компонента изменения фокусного расстояния в зависимости от расстояния до опасной области может выбираться правильный угол съемки, чтобы таким образом оптимально поддерживать многократную аналитическую оценку опасной области.
3. Компонент BLK освещения, выполненный, например, в виде прожектора, который работает в пределах или вне видимой человеку области, и с помощью которого улучшается качество графического материала, снимаемого прибором для записи изображений или, соответственно, прибором BAZG для сбора изображений ночью или при плохих погодных условиях.
Снятые таким образом изображения сохраняются прибором BAZG для записи изображений в устройстве BSPE для запоминания изображений. Это устройство BSPE для запоминания изображений либо, в соответствии с опцией «A», в качестве компонента устройства GSEV для распознавания опасных ситуаций соответственно соединено с прибором BAZG для записи изображений, либо, в соответствии с опцией «B», вне устройства GSEV для распознавания опасных ситуаций, напр., в виде банка памяти данных, в моторвагоне или в облаке данных предназначено для прибора BAZG для записи изображений или, соответственно, может соединяться с ним.
Для аналитической оценки записанных или, соответственно, собранных изображений для распознавания опасностей в опасных областях GB вдоль рельсового перегона, напр., на перроне BSG в соответствии с фиг.1 или снабженном шлагбаумом железнодорожном переезде BÜG в соответствии с фиг.2, прибор BAZG для записи изображений соединен с вычислительным/анализирующим устройством BAWE, которое тоже является одним из компонентов устройства GSEV для распознавания опасных ситуаций. Для этой цели вычислительное/анализирующее устройство BAWE, как и прибор BAZG для записи изображений, либо, в соответствии с опцией «A», соединено с устройством BSPE для запоминания изображений, либо, в соответствии с опцией «B», предназначено для устройства BSPE для запоминания изображений или, соответственно, может соединяться с ним. Таким образом возникает функциональный блок из вычислительного/анализирующего устройства BAWE, прибора BAZG для записи изображений и устройства BSPE для запоминания изображений, у которого названные компоненты устройства GSEV для распознавания опасных ситуаций функционально взаимодействуют для поддерживаемого вычислениями/аналитической оценкой распознавания опасных ситуаций.
Для этого вычислительное/анализирующее устройство BAWE имеет предпочтительно энергонезависимую, считываемую память SP, в которой сохранены считываемые процессором команды управляющей программы управляющего распознаванием опасных ситуаций программного модуля PGM, и процессор PZ, который выполняет команды управляющей программы программного модуля PGM для поддерживаемого вычислениями/аналитической оценкой распознавания опасных ситуаций. Для этого процессор PZ в целях управления и для считывания данных получает доступ к прибору BAZG для записи изображений и устройству BSPE для запоминания изображений.
Вычислительное/анализирующее устройство BAWE или, соответственно, программный модуль PGM, имеющий процессор PZ, выполняющий команды управляющей программы программного модуля PGM для поддерживаемого вычислениями/аналитической оценкой распознавания опасных ситуаций, теперь применительно к распознаванию опасных ситуаций выполнены таким образом, что на каждом из изображений BIGB опасной области GB маркируется область BIB изображения, в которой показана некоторая отдельная область TBGB графически изображенной опасной области GB, которая расценивается как особенно критическая (высококритическая).
Эта маркировка может теперь осуществляться, например, таким образом, что область BIB изображения критической отдельной области TBGB зарегистрированной опасной области GB на основании предшествующих изображенной на каждой из фиг.1 и 2 поездке рельсового транспортного средства SFZ поездок с целью инициализации по тому же самому рельсовому пути GL рельсового перегона SST рельсовой сети SNE, или на основании изображенной на каждой из фиг.1 и 2 поездки рельсового транспортного средства SFZ подвергается анализу изображений на базе рельсового пути или рельсов.
В первом названном случае (вариант 1) такие опасные области известны из более ранних поездок с целью инициализации, при каждой из которых для каждого положения рельсового транспортного средства в области вокзала были маркированы опасная область как таковая и высококритическая часть опасной области (особенно критическая отдельная область). Так, например, дважды делается изображение, и причем с одного и того же места, напр., при въезде в область вокзала, имеющую перрон. Таким образом, и опасная область, и особенно критическая отдельная область остаются всегда одними и теми же. В этой связи ссылаемся на автоматическое распознавание сигналов в железнодорожном/рельсовом сообщении с в соответствии с международной заявкой на патент (заявка № PCT/EP2016/057804; публикация № WO 2017/174155 A1) и раскрытой в ней технической теорией, где сравнимым образом поступают в отношении распознавания сигналов.
При альтернативном случае (вариант 2) сначала распознается рельсовый путь следования. Исходя из рельсового пути следования, распознается кромка перрона как край опасной области, а также расстояние от рельсового транспортного средства до перрона или, соответственно, опасной области и, наконец, (высококритическая) особенно критическая область относительно кромки перрона или, соответственно, края опасной области, с одной стороны, и опасная область как таковая, соответственно. В этой связи ссылаемся на выполнение анализа изображений на базе колеи/рельсового пути в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка №102016224331.4) и международной заявкой на патент (заявка № PCT/…; публикация № WO…) и раскрытой в каждой из них технической теорией.
Когда маркировка, напр., по одному из намеченных выше вариантов, с помощью вычислительного/анализирующего устройства BAWE осуществлена, то вычислительное/анализирующее устройство BAWE или, соответственно, программный модуль PGM вместе с выполняющим команды управляющей программы программного модуля PGM для поддерживаемого вычислениями/аналитической оценкой распознавания опасных ситуаций процессором PZ применительно к поддерживаемому вычислениями/аналитической оценкой распознаванию опасных ситуаций выполнены также таким образом, что для маркированной области BIB изображения путем сравнения образцов проверяется, находятся ли в критической отдельной области TBGB люди и/или движущиеся предметы.
При этом сравнение образцов представляет собой согласование паттернов, при котором распознаются либо с помощью положительного сравнения предпочтительно люди и/или движущиеся предметы, либо с помощью отрицательного сравнения предпочтительно временные изменения в структуре опасной области GB, причем при последнем, напр., проверяется прерывание закономернного образца перрона (напр., каменные плитки, белая линия).
Для этой проверки, находятся ли в критической отдельной области TBGB люди и/или движущиеся предметы, для (высококритической) особенно критической отдельной области через короткие интервалы времени снимаются несколько изображений, уже упомянутых в связи с описанием фиг.1 изображений BITB.
После того, как изображения BITB об опасной области GB уже зарегистрированы прибором BAZG для записи изображений, вычислительное/анализирующее устройство BAWE и прибор BAZG для записи изображений BITB для регистрации изображений BITB об отдельной области TGB также выполнены и функционально взаимодействуют таким образом, что
1) регистрируется множество изображений BIGB критической отдельной области TGB, представляющих эту критическую отдельную область;
2) осуществляется перерасчет на одинаковый размер всех изображений BIGB, BITB с учетом соответствующего расстояния до опасной области GB;
3) рассчитывается индекс активности путем распознавания движений людей и/или предметов в опасной области GB (напр., играющие или озорничающие дети) и
4) рассчитанный индекс активности сравнивается с сохраненным в памяти пороговым значением.
При этом сравнение порогового значения выполняется вычислительным/анализирующим устройством BAWE или, соответственно, процессором PZ, который выполняет команды управляющей программы программного модуля PGM для поддерживаемого вычислениями/аналитической оценкой распознавания опасных ситуаций, при этом, если в критической отдельной области TBGB находятся люди и/или движущиеся предметы, и сравнение показывает, что рассчитанный индекс активности соответствует пороговому значению или превышает его, вычислительным/анализирующим устройством BAWE или, соответственно, процессором PZ генерируется управляющий сигнал SSI, с помощью которого указывается на опасную ситуацию в опасной области GB по эксплуатационным правилам в рельсовом сообщении SVK. Это происходит предпочтительно путем подачи предупредительного сигнала WSI рельсовым транспортным средством SFZ. В этом месте следует еще раз указать, что предупредительный сигнал может быть выполнен как в виде акустического, так и в виде визуального сигнала.
Чтобы можно был подавать предупредительный сигнал WSI, вычислительное/анализирующее устройство BAWE устройства GSVE для распознавания опасных ситуаций соединено с устройством STE управления в моторовагоне TRW рельсового транспортного средства SFZ (сравн. фиг.1).
С помощью описанного выше устройства GSVE для распознавания опасных ситуаций возможно ассистирование или, соответственно, даже реализация автоматизированного (автономного) или с участием машиниста ведения железнодорожного транспортного средства BFZ или, соответственно, рельсового транспортного средства SFZ без дополнительной инфраструктуры по некоторому перегону следования. Это имеет место, в частности, тогда, когда устройство GSVE для распознавания опасных ситуаций реализовано в виде виртуальной машины, которая выполнена и функционирует как «Software Defined Signal Recognition of Rail Traffic Systems» (англ. программно-определяемое распознавание сигналов систем железнодорожного транспорта).
Группа изобретений относится к области железнодорожного транспорта. Регистрируют множество изображений (BIGB) опасной области (GB), частично расположенной вдоль железнодорожного перегона (BST) рельсовой сети (SNE). На каждом из изображений (BIGB) опасной области (GB) маркируют область (BIB) изображения, показывающую отдельную область (TBGB) графически изображенной опасной области (GB), которая расценивается как особенно критическая. Для маркированной области (BIB) путем сравнения образцов проверяют, находятся ли в критической отдельной области (TBGB) люди и/или движущиеся предметы. Устройство (GSEV) для распознавания опасных ситуаций содержит прибор (BAZG) для записи изображений и вычислительное/анализирующее устройство (BAWE), которое соединено и функционально взаимодействует с прибором (BAZG) для записи изображений и устройством (BSPE) для запоминания изображений. Железнодорожное транспортное средство содержит устройство (GSEV) для распознавания опасных ситуаций. Достигается возможность распознавания опасных ситуаций путем интерактивного анализа изображений в комбинации с известными метаданными об опасных областях. 3 н. и 23 з.п. ф-лы, 3 ил.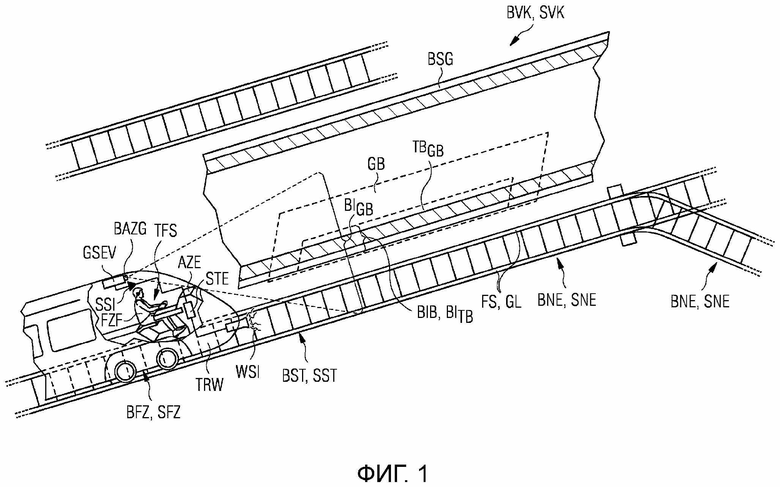
1. Способ распознавания опасных ситуаций в железнодорожном сообщении (BVK), в частности в рельсовом сообщении (SVK),
отличающийся тем, что
a) с железнодорожного транспортного средства (BFZ), в частности рельсового транспортного средства (SFZ), в частности из перспективы машиниста (FUF, TFS, TRW) моторвагона и/или из неподвижного, обеспечивающего видимость колеи положения в или на транспортном средстве (BFZ, SFZ), регистрируют множество изображений (BIGB) опасной области (GB), известной в отношении ее локальных координат и по потенциальным опасным ситуациям в железнодорожном сообщении (BVK, SVK), частично расположенной вдоль железнодорожного перегона (BST) рельсовой сети (SNE), представляющих эту опасную область (GB);
b) на каждом из изображений (BIGB) опасной области (GB) маркируют область (BIB) изображения, показывающую отдельную область (TBGB) графически изображенной опасной области (GB), которая расценивается как особенно критическая;
c) для маркированной области (BIB) путем сравнения образцов проверяют, находятся ли в критической отдельной области (TBGB) люди и/или движущиеся предметы.
2. Способ по п.1, отличающийся тем, что
a) регистрируют множество изображений (BIGB) критической отдельной области (TGB), представляющих эту критическую отдельную область;
b) осуществляют перерасчет на одинаковый размер всех изображений (BIGB, BITB) с учетом соответствующего расстояния до опасной области (GB);
c) рассчитывают индекс активности путем распознавания движений людей и/или предметов в опасной области (GB) и
d) рассчитанный индекс активности сравнивают с сохраненным в памяти пороговым значением.
3. Способ по п.1 или 2, отличающийся тем, что
опасная ситуация в опасной области (GB) по эксплуатационным правилам в железнодорожном сообщении (BVK, SVK) указывается тем, что подают предпочтительно акустический предупредительный сигнал (WSI), когда
a) в критической отдельной области (TBGB) находятся люди и/или движущиеся предметы;
b) сравнение показывает, что рассчитанный индекс активности соответствует пороговому значению или превышает его.
4. Способ по п.3, отличающийся тем, что предупредительный сигнал (WSI) подают железнодорожным транспортным средством (BFZ, SFZ).
5. Способ по одному из пп.1-4, отличающийся тем, что изображения (BIGB, BITG) снимают несколькими приборами (BAZG) для записи изображений одинаковой конструкции, например, видеокамерами, или приборами различной конструкции, например, видеокамерами, лазерными сенсорами, сенсорами на базе радара, основанными на беспроводной локации и измерении расстояния, инфракрасными камерами и/или тепловыми камерами для съемки изображений.
6. Способ по одному из пп.1-5, отличающийся тем, что производят маркировку области (BIB) изображения критической отдельной области (TBGB) зарегистрированной опасной области (GB) на основании предшествующих поездок с целью инициализации по железнодорожным перегонам (BST, SST) железнодорожной сети (BNE, SNE) или на основании анализа изображений на базе колеи, в частности на базе рельсового пути или рельсов.
7. Способ по п.6, отличающийся тем, что при анализе изображений на базе колеи сначала распознают колею (FS) следования, в частности рельсовый путь (GL) следования, железнодорожного перегона (BST, SST), исходя из колеи (FS, GL) следования, край (RGB) опасной области (GB), а также расстояние от железнодорожного транспортного средства до опасной области (GB) и, в конечном итоге, критическую отдельную область (TBGB) относительно края (RGB) опасной области (GB).
8. Способ по одному из пп.1-7, отличающийся тем, что сравнение образцов выполняют как положительное сравнение, при котором предпочтительно распознают людей и/или движущиеся предметы, или как отрицательное сравнение, при котором предпочтительно распознают временные изменения в структуре опасной области (GB).
9. Способ по одному из пп.1-8, отличающийся тем, что опасная область (GB) относится либо к перрону (BSG), где люди входят в железнодорожное транспортное средство (BFZ, SFZ) и/или выходят, либо к снабженному шлагбаумом или не снабженному шлагбаумом железнодорожному переезду (BÜG).
10. Способ по одному из пп.1-9, отличающийся тем, что этим способом осуществляют ассистирование автоматизированному (автономному) или с участием машиниста ведению железнодорожного транспортного средства (BFZ, SFZ) без дополнительной инфраструктуры по перегону следования.
11. Устройство (GSEV) для распознавания опасных ситуаций в железнодорожном сообщении (BVK), в частности в рельсовом сообщении (SVK), отличающееся тем, что содержит
a) по меньшей мере один прибор (BAZG) для записи изображений, с помощью которого с железнодорожного транспортного средства (BFZ), в частности рельсового транспортного средства (SFZ), в частности из перспективы машиниста (FZF, TFS, TRW) моторвагона и/или из неподвижного, обеспечивающего видимость колеи положения в транспортном средстве (BFZ, SFZ) или на нем, могут регистрироваться множество изображений (BIGB) опасной области (GB), известной в отношении ее локальных координат и по потенциальным опасным ситуациям в железнодорожном сообщении (BVK, SVK), частично расположенной вдоль железнодорожного перегона (BST) железнодорожной сети (BNE), в смонтированном состоянии рельсового перегона (SST) рельсовой сети (SNE), представляющих эту опасную область (GB), и могут запоминаться в устройстве (BSPE) для запоминания изображений;
b) вычислительное/анализирующее устройство (BAWE), которое, будучи соединено и функционально взаимодействуя с прибором (BAZG) для записи изображений и устройством (BSPE) для запоминания изображений, выполнено таким образом, в частности, имеет энергонезависимую, считываемую память (SP), в которой сохранены считываемые процессором команды управляющей программы управляющего распознаванием опасных ситуаций программного модуля (PGM), и процессор (PZ), который выполняет команды управляющей программы программного модуля (PGM) для поддерживаемого вычислениями/аналитической оценкой распознавания опасных ситуаций, чтобы на каждом из изображений (BIGB) опасной области (GB) маркировалась некоторая область (BIB) изображения, показывающая некоторую отдельную область (TBGB) графически изображенной опасной области (GB), которая расценивается как особенно критическая; причем
c) вычислительное/анализирующее устройство (BAWE) выполнено таким образом, что для маркированной области (BIB) путем сравнения образцов проверяется, находятся ли в критической отдельной области (TBGB) люди и/или движущиеся предметы.
12. Устройство (GSEV) по п.11, отличающееся тем, что
a) вычислительное/анализирующее устройство (BAWE) и прибор (BAZG) для записи изображений (BITB), которые выполнены и функционально взаимодействуют таким образом, что регистрируется множество изображений (BIGB) критической отдельной области (TGB), представляющих эту критическую отдельную область;
b) вычислительное/анализирующее устройство (BAWE), прибор (BAZG) для записи изображений и устройство (BSPE) для запоминания изображений, которые выполнены и функционально взаимодействуют таким образом, что осуществляется перерасчет на одинаковый размер всех изображений (BIGB, BITB) с учетом соответствующего расстояния до опасной области (GB);
c) вычислительное/анализирующее устройство (BAWE), которое выполнено таким образом, что
c1) рассчитывается индекс активности путем распознавания движений людей и/или предметов в опасной области (GB) и
c2) рассчитанный индекс активности сравнивается с сохраненным в памяти пороговым значением.
13. Устройство (GSEV) по п.11 или 12, отличающееся тем, что
вычислительное/анализирующее устройство (BAWE) может соединяться с устройством (STE) управления в железнодорожном транспортном средстве (BFZ, SFZ) и при этом активирует устройство (STE) управления таким образом, что на опасную ситуацию в опасной области (GB) по эксплуатационным правилам в железнодорожном сообщении (BVK, SVK) указывается тем, что подается предпочтительно акустический предупредительный сигнал (WSI), когда
a) в критической отдельной области (TBGB) находятся люди и/или движущиеся предметы;
b) сравнение показывает, что рассчитанный индекс активности соответствует пороговому значению или превышает его.
14. Устройство (GSEV) по п.13, отличающееся тем, что предупредительный сигнал (WSI) может подаваться железнодорожным транспортным средством (BFZ, SFZ).
15. Устройство (GSEV) по одному из пп.11-14, отличающееся тем, что содержатся несколько приборов (BAZG) для записи изображений одинаковой конструкции, например, несколько видеокамер, или приборов различной конструкции, например, несколько видеокамер, лазерных сенсоров, сенсоров на базе радара, основанных на беспроводной локации и измерении расстояния, инфракрасных камер и/или тепловых камер для съемки изображений, которые снимают изображения (BIGB, BITG).
16. Устройство (GSEV) по одному из пп.11-15, отличающееся тем, что вычислительное/анализирующее устройство (BAWE) выполнено таким образом, что маркировка области (BIB) изображения критической отдельной области (TBGB) зарегистрированной опасной области (GB) производится на основании предшествующих поездок с целью инициализации по железнодорожным перегонам (BST, SST) железнодорожной сети (BNE, SNE) или на основании анализа изображений на базе колеи, в частности на базе рельсового пути или рельсов.
17. Устройство (GSEV) по п.16, отличающееся тем, что с помощью осуществляемого на вычислительном/анализирующем устройстве (BAWE) анализа изображений на базе колеи сначала может распознаваться колея (FS) следования, в частности рельсовый путь (GL) следования, железнодорожного перегона (BST, SST), исходя из колеи (FS, GL) следования, край (RGB) опасной области (GB), а также расстояние от железнодорожного транспортного средства до опасной области (GB) и, в конечном итоге, критическая отдельная область (TBGB) относительно края (RGB) опасной области (GB).
18. Устройство (GSEV) по одному из пп.11-17, отличающееся тем, что вычислительное/анализирующее устройство (BAWE) выполнено таким образом, что сравнение образцов выполняется как положительное сравнение, при котором предпочтительно распознаются люди и/или движущиеся предметы, или как отрицательное сравнение, при котором предпочтительно распознаются временные изменения в структуре опасной области (GB).
19. Устройство (GSEV) по одному из пп.11-18, отличающееся тем, что опасная область (GB) относится либо к перрону (BSG), где люди входят в железнодорожное транспортное средство (BFZ, SFZ) и/или выходят, либо к снабженному шлагбаумом или не снабженному шлагбаумом железнодорожному переезду (BÜG).
20. Устройство (GSEV) по одному из пп.11-19, отличающееся тем, что прибор (BAZG) для записи изображений выполнен с возможностью поворота.
21. Устройство (GSEV) по одному из пп.11-20, отличающееся тем, что для записи изображений имеет корректирующий компонент (KOK), который приобщает данные о погоде и освещенности для аналитической оценки графического материала.
22. Устройство (GSEV) по одному из пп.11-21, отличающееся тем, что прибор (BAZG) для записи изображений имеет компонент (BVK) изменения фокусного расстояния, который, в зависимости от окружения, например, вокзал, городская зона, сельская местность и пр., выбирает правильный угол съемки, чтобы таким образом оптимально поддерживать аналитическую оценку изображения (BIGB, BITB), и/или в зависимости от расстояния до опасной области (GB) выбирает правильный угол съемки, чтобы таким образом оптимально поддерживать многократную аналитическую оценку опасной области (GB).
23. Устройство (GSEV) по одному из пп.11-22, отличающееся тем, что прибор (BAZG) для записи изображений имеет компонент (BLK) освещения, в частности прожектор, который работает в пределах или вне видимой человеку области.
24. Устройство (GSEV) по одному из пп.11-23, отличающееся виртуальной машиной, которая выполнена и функционирует как «Software Defined Signal Recognition of Rail Traffic Systems» (программно-определяемое распознавание сигналов систем железнодорожного транспорта).
25. Устройство (GSEV) по одному из пп.11-24, отличающееся тем, что с помощью устройства (GSEV) возможно ассистирование автоматизированному (автономному) или с участием машиниста ведению железнодорожного транспортного средства (BFZ, SFZ) без дополнительной инфраструктуры по перегону следования.
26. Железнодорожное транспортное средство для распознавания опасных ситуаций в железнодорожном сообщении (BVK), в частности рельсовое транспортное средство (SFZ) для распознавания опасных ситуаций в рельсовом сообщении (SVK), отличающееся тем, что устройство (GSEV) для распознавания опасных ситуаций по одному из пп.11-25 интегрировано в железнодорожное транспортное средство (BFZ, SFZ).
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| XP 028737994, 11.05.2013 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Стартовый пистолет | 1951 |
|
SU94202A1 |

