Изобретение касается способа распознавания колеи в железнодорожном сообщении, в частности для распознавания рельсового пути в рельсовом сообщении, согласно ограничительной части п.1 формулы изобретения, устройства для распознавания колеи в железнодорожном сообщении, в частности для распознавания рельсового пути в рельсовом сообщении, согласно ограничительной части п.19 формулы изобретения и железнодорожного транспортного средства для распознавания колеи в железнодорожном сообщении, в частности рельсового транспортного средства для распознавания рельсового пути в рельсовом сообщении, согласно ограничительной части п.43 формулы изобретения.
Железнодорожные транспортные средства, как составная часть современной транспортной инфраструктуры, представляют собой колейные средства сообщения и транспорта, которые передвигаются, например, катясь по или под одним или двумя направляющими рельсами (рельсовыми путями), паря над или под магнитным полем или вися на стальных тросах. Из названных колейных средств сообщения и транспорта наиболее широко распространены рельсовые транспортные средства, которые базируются на колесно-рельсовой системе, которые либо (имеют) собственный привод ходовой части (моторвагон), либо тянутся или перемещаются локомотивом, и у которых преимущественно стальные колеса, имеющие гребень бандажа, направляются по двум стальным рельсам или, соответственно, рельсовым путям.
Для эксплуатации рельсовых транспортных средств распознавание рельсового пути следования имеет существенное значение, так как часто несколько рельсовых путей проложены параллельно, в области вокзала при необх. будучи разделены перронами. Это относится к аналитической оценку сигналов для эксплуатации транспортных средств («какая скорость относится к какому рельсовому пути?», «какой рельсовый путь освобожден?»), а также к механизмам безопасности, чтобы, например, избегать одновременного следования по одному и тому же перегону в противоположном направлении.
Распознавание рельсового пути следования является обязанностью машиниста моторвагона, а реализация механизмов безопасности производится, как правило, с помощью устройств централизации.
Это приводит к следующим проблемам:
I. Машинисты моторвагонов, как и все другие люди, выполняющие свои задачи, иногда невнимательны или совершают ошибки восприятия и поэтому, при известных обстоятельствах, путают, какой сигнал на данном перегоне относится к их транспортному средству (именно в случае нескольких параллельных перегонов имеют место несколько сигналов, которые, однако, относятся к различным перегонов).
II. Машинисты моторвагонов, при известных обстоятельствах, не всегда в наличии (болезнь, забастовка, незапланированное повышение количества заявок на транспортные операции), так что, при необходимости, железнодорожные поездки должны отменяться.
III. Распознаваемый машинистом моторвагона рельсовый путь (по эксплуатационным причинам), как правило не передается транспортному средству для автоматической аналитической оценки, так что определенные функции транспортного средства доступны только в ограниченной степени. Например, ассистенту, дающему рекомендации по ведению, для определения идеальных точек ускорения и торможения нужна информация о допустимой максимальной скорости. При известных обстоятельствах, в случае нескольких параллельно проложенных перегонов она может варьироваться. Тогда ассистент, дающий рекомендации по ведению, должен знать, по какому рельсового пути он поедет.
IV. Реализация механизмов безопасности в устройствах централизации может назначаться участковым диспетчером, так что реализация дополнительной ступени безопасности может еще более уменьшать вероятность столкновений (см. железнодорожную аварию в Бад Айблинге).
Проблема распознавания рельсового пути до сих до сих пор (решалась?) с помощью затратных дополнительных инвестиций в инфраструктуру перегона, такую как индукционные петли, компьютеры вдоль перегона и установки для связи между поездом и компонентами перегона. Поэтому соответствующие решения рентабельны только на перегонах обозримой длины, таких как, напр., подземные железные дороги или железные дороги между терминалами аэропортов.
Лежащая в основе изобретения задача заключается в том, чтобы предложить способ, устройство и железнодорожное транспортное средство, в частности рельсовое транспортное средство, для распознавания колеи в железнодорожном сообщении, в частности для распознавания рельсового пути в рельсовом сообщении, с помощью которого автоматически распознаются либо колеи в железнодорожном сообщении, когда железнодорожные транспортные средства находятся в пути на железнодорожных перегонах в железнодорожной сети, либо рельсовые пути в рельсовом сообщении, когда рельсовые транспортные средства находятся в пути на рельсовых перегонах в рельсовой сети.
Автоматическое распознавание колей в железнодорожном сообщении, в частности рельсовых путей в рельсовом сообщении, что является предметом настоящей международной заявки на патент (заявка № PCT/…; публикация № WO…) и обосновывающей ее приоритет заявки на патент DE (заявка №102016224335.7), с учетом будущего автоматизированного (автономного) или с участием машиниста ведения железнодорожных транспортных средств в железнодорожном сообщении или, соответственно, рельсовых транспортных средств в рельсовом сообщении является безусловной НЕОБХОДИМОСТЬЮ.
Но не только аспект автоматического распознавания колей/рельсовых путей имеет значение для будущего автоматизированного (автономного) или с участием машиниста ведения, но и последующие технические аспекты, все которые в большей или меньшей степени находятся в техническом контексте с настоящей заявкой на патент и поэтому приведены, и в связи с этим их содержания должны учитываться и при необх. даже включаться в нее.
Речь идет о следующих аспектах:
1) Автоматическое распознавание сигналов в железнодорожном/рельсовом сообщении в соответствии с международной заявкой на патент (заявка № PCT/EP2016/057804; публикация № WO 2017/174155 A1) и раскрытой в ней технической теорией.
2) Автоматическое распознавание опасных ситуаций в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка № 102016224358.6) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
3) Автоматическое распознавание препятствий в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка № 102016224344.6) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
4) Альтернативное определение положений в рельсовом сообщении, когда традиционное определение положений со спутниковой поддержкой не срабатывает или является недостаточным, в соответствии с заявкой на патент DE (заявка № 102016224355.1) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
5) Выполнение анализа изображений на базе колеи/рельсового пути в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка № 102016224331.4) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
Вышеназванная контекстная задача решается, исходя из способа распознавания колеи/рельсового пути, определенного в ограничительной части п.1 формулы изобретения, с помощью признаков, указанных в отличительной части п.1 формулы изобретения.
Помимо этого, вышеназванная контекстная задача решается, исходя из устройства для распознавания колеи/рельсового пути, определенного в ограничительной части п.19 формулы изобретения с помощью признаков, указанных в отличительной части п.19 формулы изобретения.
Далее, вышеназванная контекстная задача решается, исходя из железнодорожного транспортного средства, в частности рельсового транспортного средства, определенного в ограничительной части п.43 формулы изобретения, с помощью признаков, указанных в отличительной части п.43 формулы изобретения.
Идея, лежащая в основе изобретения по независимым пп.1, 19 и 43 формулы изобретения, заключается в том, чтобы на базе
(i) сохраненной в памяти в качестве референтных данных, зарегистрированных на некотором железнодорожном перегоне в железнодорожной сети применительно к географическому окружению и использования колеи в железнодорожном сообщении, относящейся к месту референтной информации в виде референтной информации о месте, референтной информации о колее и референтной информации о смене колеи, полученной в контексте регистрации контекстной и указательной информации и при необходимости дополнительной, связанной с ней метаинформации, а также
(ii) согласования зарегистрированной при работе по распознаванию колеи на основе данных о положении рабочей информации о месте и рабочей информации о колее или рабочей информации о смене колеи с сохраненными в памяти референтными данными распознавать использование колеи на железнодорожном перегоне, причем это происходит путем аналитической оценки релевантности и содержания информации тогда, когда при согласовании найдена зарегистрированная рабочая информация о колее или рабочая информация о смене колеи для использования колеи, которая применительно к рабочей информации о месте и соответствующей ей референтной информации о месте соответствует содержащейся в референтных данных референтной информации о колее или референтной информации о смене колеи с учетом содержащейся в референтных данных контекстной и указательной информации, а также при необходимости дополнительно имеющейся метаинформации.
При этом основным принципом изобретения является на базе данных о положении и согласования изображений окружения, путем аналитической оценки уже существующих компонентов инфраструктуры и инициализирующей информации автоматически распознавать колею следования.
Автоматическое распознавание колеи может предпочтительным образом по меньшей мере частично достигаться с помощью следующих шагов.
Сначала регистрируются пробные поездки или, соответственно, специальные поездки или другими надлежащими способами изображения стрелок на перегоне и специфических для колеи изображений, по которым должны автоматизированным образом ехать рельсовые транспортные средства. Сюда относятся в идеальном случае изображения, содержащие различные стрелочные станки, но при необх. также может быть уже достаточно одного стрелочного станка. Для этих изображений регистрируется точное положение съемочного прибора и при необх. угол съемочного прибора относительно транспортного средства и, следовательно, относительно колеи. Затем эти изображения оцениваются людьми-экспертами и маркируется точное положение стрелки на изображении, а также ее состояние. Для изображений, которые должны давать заключение о колее следования, человеком-экспертом маркируется, по какой колее осуществляется следование. Эти выполняемые вручную операции могут при необх. заменяться алгоритмами анализа изображений для обнаружения стрелок на изображении или согласованием с метаданными перегона.
Дополнительно могут регистрироваться метаданные, такие как, напр., тип стрелки. Для каждого типа стрелки могут еще при необх. регистрироваться калиброванные изображения различных состояний стрелки (напр., в специальной графической лаборатории). Съемки на перегоне, маркировки и оценка людьми-экспертами, а также при необх. другие метаданные, а также при необх. калиброванные изображения архивируются в банке данных изображений на рельсовом транспортном средстве.
Во время эксплуатации железнодорожное транспортное средство на базе компонента для определения положений определяет текущее положение транспортного средства. Этот компонент для определения положений принимается как данный. На базе этой информации о положении железнодорожное транспортное средство с помощью «компонента для непрерывного распознавания колеи», который на базе способов согласования изображений распознает колею следования, определяет, по какой колее в данный момент осуществляется следование. Если эта информация не может определяться на базе изображений окружения, напр., потому что на головных вокзалах изображения окружения не дают достаточно информации для определения колеи, в помощь может браться компонент инициализации, который сохраняет в памяти последнюю колею следования и положение (при самом первом пуске поезда в эксплуатацию информация о колее может вводиться вручную).
При постоянном определении колеи с помощью «компонента для непрерывного распознавания колеи» гарантируется, что никакие ненормальные рабочие процессы (перестановка транспортного средства краном; неожиданное стирание системной памяти вследствие повышенного напряжения) не приведут к ложному суждению о колее. (Но теоретически нет необходимости в непрерывном распознавании колеи).
Наряду с непрерывным распознаванием колеи, «событийно управляемый компонент для распознавания колеи» может применяться для того, чтобы аналитически оценивать информацию из инфраструктуры и таким образом тоже распознавать колею (напр., передача телеграмм с помощью маяка или распознавание сотрясения вследствие переезда стрелки и последующий анализ изображений).
На базе компонента инициализации, «компонента для непрерывной регистрации колеи» и «событийно управляемого компонента для распознавания колеи» может уверенно распознаваться колея. Для отвечающего современным требованиям распознавания колеи и, помимо этого, распознавания следующей колеи следования применяется компонент для анализа смены колеи. На базе данных о положении, колее и перегоне компонент информации о колее знает, когда во время эксплуатации в следующий раз будет переезжаться стрелка. С помощью этой информации может активироваться компонент для анализа смены колеи, который затем снимает изображение находящейся впереди стрелки и на основе сравнения этого изображения с имеющимися снимками стрелки распознает, по какой колее стрелка поведет в следующий раз. Именно так может также распознаваться следующая колея следования.
Как для непрерывного распознавания колеи, так и для распознавания смены колеи используются данные о положении, чтобы определять, когда с помощью компонента для сбора изображений должна производиться съемка окружения. Затем компонент для сбора изображений снимает несколько изображений окружения и инфраструктуры колеи через узкие временные интервалы и передает их компоненту для компенсации положения. Этот компонент при необходимости рассчитывает компенсацию положения снятых изображений на базе данных о положении, т.е. изображения при необх. несколько искажаются. Затем эти изображения отдаются компоненту для согласования изображений, который на базе имеющегося графического материала, его оценки, метаданных и калибровочных изображений распознает состояние стрелки или колею следования. Затем на базе распознанной таким образом колеи или смены колеи при знании механизма регулирования техники ведения и способностей транспортного средства могут автоматически рассчитываться соответствующие действия ведения, которые отображаются машинисту моторвагона в качестве рекомендаций, при необх. могут применяться для валидации команд по ведению машиниста моторвагона или передаваться для автоматической реализации автоматической системой ведения.
С помощью намеченного выше интеллигентного согласования данных о перегоне, рельсовом пути, положении и данных камеры может достигаться, что
- колея следования будет надежно распознаваться автоматически без дорогостоящих инвестиций в инфраструктуру;
- следующая колея следования будет распознаваться автоматически еще до того, как по ней осуществляется следование;
- со временем система будет работать все лучше и надежнее;
- колея следования/следующая колея следования при при неблагоприятных условиях видимости смогут распознаваться надежнее, чем машинистами моторвагона;
- машинисты моторвагона больше не будут нужны для распознавания рельсовых путей следования, так что колея следования может распознаваться независимо от их наличия.
В предусмотренном для этого устройстве для распознавания колеи для этого содержатся предпочтительно следующие компоненты/модули:
1. Выполненное в качестве компонента информации о колее вычислительное/анализирующее устройство.
Это устройство содержит информацию о колее следования. Рассчитывает на базе данных о положении и перегоне, когда должен производиться анализ смены колеи.
Аналитически оценивает новую информацию о колее непрерывного распознавания колеи, событийно управляемого распознавания колеи и анализа смены колеи.
2. Выполненное в качестве компонента инициализации инициализирующее устройство.
Устройство сохраняет в памяти последнюю колею следования и положение. Должно включаться перед первым поворотом колес. Распознает движения транспортного средства в неоснащенном состоянии, напр., по движению маневрового локомотива в случае системы рельсового сообщения.
Этот компонент может отсутствовать, когда при включении железнодорожного транспортного средства сразу же может применяться непрерывное распознавание колеи.
3. Выполненное в качестве событийно управляемого компонента валидации колеи распознающее устройство для событийно управляемого распознавания колей.
Устройство аналитически оценивает распознанные компонентом для распознавания элементов инфраструктуры элементы инфраструктуры, которые активно передают информацию (маяки) или распознаются пассивно (сотрясения от стрелки). Применяет при необходимости базирующийся на изображении способ распознавания колеи непрерывного распознавания колеи, когда элементы инфраструктуры не дают достаточно информации для распознавания рельсового пути.
4. Выполненное в качестве компонента распознавания элементов инфраструктуры устройство для регистрации информации.
Производит аналитические оценки, напр.,
a. маяков при передаче данных
b. стрелок при специфическом сотрясении.
5. Выполненное в качестве компонента для непрерывного распознавания колеи распознающее устройство для непрерывного распознавания колей:
- устройство распознает на базе изображений окружения и рельсового пути колею следования;
- устройство изменяет для оптимизации интервалы распознавания в зависимости от данных о положении и скорости, напр., при темпе 200 нет необходимости непрерывно распознавать колею.
a. В варианте 1 рассчитываются фактически только степени схожести по изображениям в зависимости от колеи следования. Затем для конкретного изображения может определяться, похоже ли оно на какое-либо из снятых изображений колеи 1 или на какое-либо из снятых изображений колеи 2;
b. в варианте 2 колеи, напр., рельсы, распознаются на изображении с помощью алгоритмов распознавания кромок и согласовываются с информацией о перегоне.
6. Выполненное в качестве компонента для анализа смены колеи устройство распознавания для обусловленного сменой колеи распознавания колей.
Устройство аналитически оценивает изображения расположенной впереди стрелки и согласовывает это с возможными положениями стрелки. Таким образом распознает, какая колея будет следующей колеей следования.
7. Выполненное в качестве банка данных перегона и транспортного средства запоминающее устройство.
Устройство содержит информацию о количестве колей, которые проложены параллельно, данные о положении стрелок, а также информацию о монтаже используемых камер (компоненты сбора изображений).
8. Выполненное в качестве компонента для определения положений устройство для определения положений.
Устройство традиционным образом определяет географическое положение транспортного средства.
9. Выполненное в качестве компонента для компенсации положений устройство компенсации положений.
Устройство определяет, возможно, необходимые искажения графического материала, в случае если имеющийся графический материал банка данных изображений был снят не точно в том же месте, что и изображения, снятые для поездки.
10. Выполненное в качестве прибора для записи изображений или компонента для сбора изображений регистрирующее устройство.
Устройство содержит обычную видеокамеру, инфракрасную камеру, тепловую камеру для съемки изображений или аналогичный прибор, который может снимать графический материал окружения. Предпочтительно выполнено с возможностью поворота, чтобы можно было компенсировать угол съемочного прибора относительно колеи. С учетом релевантности для безопасности компонента для сбора изображений оно должно предусматриваться редундантно, чтобы при повреждении, выходе из строя или загрязнении обеспечить возможность эксплуатации по меньшей мере ограниченным образом. Кроме того, можно было бы заставить работать два или больше этих компонентов параллельно, чтобы повысить достоверность получаемых данных.
11. Выполненное в качестве компонента для согласования изображений для распознавания колеи устройство для согласования положений.
(Вариант 1, см. п.5): Устройство сравнивает снятые во время одной поездки изображения с маркированными и оцененными экспертами изображениями, при необх. другими метаданными и калибровочными изображениями, чтобы можно было распознавать колею следования. При этом маркировка экспертов используется, чтобы можно было как можно точнее установить релевантный фрагмент изображения, а также различать релевантные и нерелевантные доли изображения. Для согласования цвета при необх. используются выделяющиеся элементы изображений в окружении сигнала, такие как белые таблички.
(Вариант 2, см. п.5): устройство аналитически оценивает, сколько колей, напр., рельсов, видны на снятом во время одной поездки изображении и определяет путем согласования с метаданными перегона текущую колею следования.
12. Выполненное в качестве компонента для согласования изображений для анализа стрелки устройство для согласования положений.
Устройство сравнивает снятые во время поездки изображения с маркированными и оцененными экспертами изображениями, при необх. другими метаданными и калибровочными изображениями, чтобы можно было распознавать положение стрелки. В остальном аналогично п.11.
13. Выполненное в качестве банка данных изображений запоминающее устройство.
Устройство содержит изображения перегона, точное положение их съемки, при необх. угол съемки, метаданные, такие как тип стрелки, а также при необх. калибровочные изображения. Они регистрируются следующим образом.
a. Статически.
Сначала статически в пробных поездках или путем целенаправленных съемок съемочным персоналом.
В расширении:
b. Динамически.
Графический материал в банке данных регулярно дополняется изображениями, вновь снятыми во время поездок.
В качестве расширения устройства для распознавания колеи, помимо этого, могут предпочтительно еще содержаться следующие компоненты/модули:
a. Корректирующий компонент для регистрирующего устройства, который привлекает к аналитической оценке графического материала данные о погоде и освещенности.
b. Компонент изменения фокусного расстояния для регистрирующего устройства, который, в зависимости от расстояния до стрелки или в зависимости от положения выбирает правильный угол съемки, чтобы таким образом оптимально поддерживать аналитическую оценку изображения. При этом может учитываться не только расстояние до стрелки, но и различные ситуации съемки. Например, тогда могут надлежащим образом обслуживаться как ситуации съемки на свободном перегоне (требуют изображений из большой удаленности, чтобы на основании скорости можно быть реагировать своевременно), так и ситуации съемки в области вокзала (требуют изображений, имеющих большую ширину).
c. Компонент освещения для регистрирующего устройства, например, прожектор, который работает в пределах или вне видимой человеку области, с помощью которого улучшается качество графического материала, снимаемого компонентом для сбора изображений ночью или при плохих погодных условиях.
d. Придорожная станция аналитической оценки, которая предпочтительно привязана посредством мобильной связи и принимает изображения, для которых аналитическая оценка возможна только с высоким коэффициентом неопределенности.
Затем эти изображения могут аналитически оцениваться человеком-экспертом, и затем эта информация может снова возвращаться в банк данных изображений железнодорожного транспортного средства.
1. При достаточной ширине полосы связи и наличии людей-экспертов это может осуществляться даже в реальном времени таким образом, что результат аналитической оценки может использоваться для управления поездом.
2. Помимо этого, с помощью придорожной станции аналитической оценки может согласовываться и распределяться графический материал железнодорожных транспортных средств одной представительной выборки транспортных средств или нескольких представительных выборок.
e. Мобильный прибор машиниста поезда или сравнимого железнодорожного служащего, который с целью оформления пассажиров, так или иначе, ездит на рельсовом транспортном средстве и аналогично пункту d) оценивает изображения, имеющие высокий коэффициент неопределенности.
Помимо этого, возможно, чтобы устройство для распознавания колеи было выполнено и функционировало в виде виртуальной машины как «Software Defined Signal Recognition of Rail Traffic Systems» (англ. программно-определяемое распознавание сигналов систем железнодорожного транспорта).
Другие преимущества изобретения вытекают из последующего описания одного из примеров осуществления изобретения с помощью фиг.1-5. На них показано:
фиг.1: в референтном режиме регистрация относящейся к месту референтной информации применительно к географическому окружению и использованию колей в железнодорожном сообщении на некотором изображенном отдельными участками железнодорожном перегоне железнодорожной сети с помощью устройства для распознавания колеи в железнодорожном транспортном средстве применительно к определенному географическому положению железнодорожного транспортного средства на железнодорожном перегоне;
фиг.2: исходя из фиг.1, в режиме распознавания колеи железнодорожного транспортного средства на участке железнодорожного перегона железнодорожной сети для определенной координаты места железнодорожного транспортного средства на этом железнодорожном перегоне регистрация рабочей информации о месте применительно к географическому окружению и рабочей информации о колее или рабочей информации о смене колеи применительно к использованию колеи в железнодорожном сообщении с помощью устройства для распознавания колеи в железнодорожном транспортном средстве;
фиг.3: принципиальная конструкция устройства для распознавания колеи для распознавания колей, обусловленного или не обусловленного сменой колеи, на основании зарегистрированной референтной информации в референтном режиме в соответствии с фиг.1 и зарегистрированной рабочей информации в режиме распознавания колеи/рельсового пути в соответствии с фиг.2;
фиг.4: принципиальная конструкция распознающего устройства для непрерывного распознавания колей, которое содержится в устройстве для распознавания колеи в соответствии с фиг.3;
фиг.5: принципиальная конструкция распознающего устройства для обусловленного сменой колеи распознавания колей, которое содержится в устройстве для распознавания колеи в соответствии с фиг.3.
На фиг.1 показано железнодорожное сообщение BVK, при котором в референтном режиме с привязкой к месту устройством FEV для распознавания колеи могут регистрироваться или, соответственно, регистрируются в виде референтной информации ROI о месте и специфической для колеи референтной информации RFI, RFWI применительно к географическому окружению, напр., в соответствии с изображением на фиг.1 применительно к области вокзала, включающей в себя типовую железнодорожную сеть BNE и обычную железнодорожную инфраструктуру в виде стрелок WCH, перрона BSG, вокзального здания BHG и пр., и использование колеи с железнодорожного транспортного средства BFZ, которое находится в пути на изображенном отдельными участками железнодорожном перегоне BST железнодорожной сети BNE на колеях FS, FSW.
По настоящему примеру осуществления железнодорожное сообщение BVK представляет собой рельсовое сообщение SVK, при котором в референтном режиме с привязкой к месту устройством GEV для распознавания рельсового пути могут регистрироваться или, соответственно, регистрируются в виде референтной информации ROI о месте и специфической для рельсового пути референтной информации RGI, RGWI применительно к географическому окружению, напр., в соответствии с изображением на фиг.1 применительно к области вокзала, включающей в себя типовую рельсовую сеть SNE и обычную железнодорожную инфраструктуру в виде стрелок WCH, перрона BSG, вокзального здания BHG и пр., и использование рельсового пути с рельсового транспортного средства SFZ, которое находится в пути на изображенном отдельными участками рельсовом перегоне SST рельсовой сети SNE на рельсовых путях GS, GLW.
Регистрация референтной информации может, например, осуществляться путем специальных поездок на рельсовом транспортном средстве. Но относящаяся к месту референтная информация может также генерироваться другим образом, чем специальные поездки. Так, напр., соответственно надлежащими независимыми от рельсового транспортного средства способами записи или на основании целенаправленной регистрации географического окружения и использования рельсового пути персоналом рельсового транспортного средства на рельсовом перегоне в рельсовой сети (регистрация, выполняемая вручную).
Вместо изображенного рельсового сообщения SVK с едущим по рельсовому перегону SST рельсовой сети SNE рельсовым транспортным средством SFZ, как уже рассматривалось, в качестве другого примера осуществления изобретения возможна и представима также любая другая, какая угодно система железнодорожного сообщения на базе ближнего или дальнего сообщения. Так, можно было бы вести речь также, напр., о системе сообщения подвесной дороги на магнитной подвеске (ключевое слово: Трансрапид, Маглев и пр.), имеющей соответственно сравнимую инфраструктуру, состоящую из железнодорожной сети, железнодорожного перегона и железнодорожного транспортного средства.
В изображенной на фиг.1 системе рельсового сообщения в моторвагоне TRW рельсового транспортного средства SFZ, имеющем пульт TFS машиниста моторвагона и интегрированное устройство AZE отображения, в котором находится рабочее место машиниста FZF транспортного средства, для регистрации референтной информации размещено устройство GEV для распознавания рельсового пути. Для этого устройство GEV для распознавания рельсового пути включает в себя предпочтительно регистрирующее устройство EFE, которое выполнено в виде прибора BAZG для записи изображений, напр., в виде обычной видеокамеры, лазерного сенсора, тепловой камеры для съемки изображений, радарного устройства, инфракрасной камеры и пр., и в связи со сбором изображений называется также прибором для сбора изображений.
Помимо этого, для референтного режима, независимо от того, размещено ли в моторвагоне TRW рельсового транспортного средства SFZ регистрирующее устройство EFE или прибор BAZG для записи изображений, предпочтительно, когда применяются больше одного регистрирующего устройства EFE или, соответственно, прибора BAZG для записи изображений. При этом, когда, напр., регистрирующее устройство EFE или прибор BAZG для записи изображений выходит из строя вследствие повреждения или загрязнения, регистрация референтной информации может, и в любом случае, продолжаться. Кроме того, при параллельной эксплуатации, например, двух регистрирующих устройств EFE или, соответственно, приборов BAZG для записи изображений можно повышать достоверность регистрируемой референтной информации.
С помощью регистрирующего устройства EFE или, соответственно, прибора BAZG для записи изображений, когда едущему по рельсовому пути GL рельсовому транспортному средству SFZ не предстоит обусловленная стрелкой WCH смена GLW рельсового пути, с рельсового транспортного средства SFZ, напр., из перспективы машиниста FZF моторвагона на пульте TFS машиниста моторвагона TRW и/или из неподвижного, обеспечивающего видимость рельсового пути положения в или на транспортном средстве SFZ, могут регистрироваться/регистрируется референтная информация ROI о месте и референтная информация RGI о рельсовом пути.
Если, напротив, едущему по рельсовому пути GL рельсовому транспортному средству SFZ предстоит обусловленная стрелкой WCH смена GLW рельсового пути, то могут регистрироваться/регистрируется референтная информация ROI о месте и референтная информация RGI о рельсовом пути. После этой смены GLW рельсового пути рельсовое транспортное средство SFZ едет уже не по рельсовому пути GL, а по рельсовому пути GLW. Тогда на этом рельсовом пути GLW снова регистрирующим устройством EFE или, соответственно, прибором BAZG для записи изображений с рельсового транспортного средства SFZ могут регистрироваться/регистрируется референтная информация ROI о месте и референтная информация RGI о рельсовом пути.
В более общей формулировке: регистрирующим устройством EFE или, соответственно, прибором BAZG для записи изображений, когда едущему по рельсовому пути GL железнодорожному транспортному средству BFZ не предстоит обусловленная стрелкой WCH смена FSW колеи, с железнодорожного транспортного средства BFZ, напр., из перспективы машиниста FZF моторвагона на пульте TFS машиниста моторвагона TRW и/или из неподвижного, обеспечивающего видимость колеи положения в или на транспортном средстве BFZ, могут регистрироваться/регистрируется референтная информация ROI о месте и референтная информация RFI о колее.
Если, напротив, едущему по колее FS железнодорожному транспортному средству BFZ предстоит обусловленная стрелкой WCH смена FSW колеи, то могут регистрироваться/регистрируется референтная информация ROI о месте и референтная информация RFWI о колее. После этой смены FSW колеи железнодорожное транспортное средство BFZ едет уже не по колее FS, а по колее FSW. Тогда на этой колее FSW снова регистрирующим устройством EFE иcто прибором BAZG для записи изображений с железнодорожного транспортного средства BFZ могут регистрироваться/регистрируется референтная информация ROI о месте и референтная информация RFI о колее.
В моторвагоне TRW рельсового транспортного средства SFZ в соответствии с изображенной на фиг.1 системой рельсового сообщения дополнительно к устройству GEV для распознавания рельсового пути, имеющему регистрирующее устройство EFE или, соответственно, прибор BAZG для записи изображений, размещено еще устройство RUZE для подсчета оборотов колес, с помощью которого регистрируются обороты колес рельсового транспортного средства SFZ на рельсовом пути GL, и которое для активации устройством GEV для распознавания рельсового пути, когда должны регистрироваться обороты колес, соединено с ним (сравн. также фиг.3 с относящимся к ней описанием).
На фиг.2, исходя из фиг.1, показано железнодорожное сообщение BVK, при котором в режиме распознавания колеи с привязкой к месту устройством FEV для распознавания колеи могут регистрироваться или, соответственно, регистрируются в виде рабочей информации BOI о месте и специфической для колеи рабочей информации BFI, BFWI применительно к географическому окружению, напр., в соответствии с изображением на фиг.2 применительно к области вокзала, включающей в себя типовую железнодорожную сеть BNE и обычную железнодорожную инфраструктуру в виде стрелок WCH, перрона BSG, вокзального здания BHG и пр., с железнодорожного транспортного средства BFZ, которое находится в пути на изображенном отдельными участками железнодорожном перегоне BST железнодорожной сети BNE на колеях FS, FSW. С привязкой к месту для режима распознавания колеи означает, что для каждого, какого угодно места на железнодорожном перегоне BST, по которому может двигаться железнодорожное транспортное средство BFZ, может определяться координата BOK места железной дороги, которой может в достаточной степени указываться положение железнодорожного транспортного средства BFZ, и относительно которой может соответственно регистрироваться рабочая информация BOI о месте и специфическая для колеи рабочая информация BFI, BFWI.
По настоящему примеру осуществления железнодорожное сообщение BVK представляет собой рельсовое сообщение SVK, при котором в режиме распознавания рельсового пути с привязкой к месту устройством GEV для распознавания рельсового пути могут регистрироваться или, соответственно, регистрируются в виде рабочей информации BOI о месте и специфической для рельсового пути рабочей информации BFI, BFWI применительно к географическому окружению, напр., в соответствии с изображением на фиг.2 применительно к области вокзала, включающей в себя типовую рельсовую сеть SNE и обычную железнодорожную инфраструктуру в виде стрелок WCH, перрона BSG, вокзального здания BHG и пр., с рельсового транспортного средства SFZ, которое находится в пути на изображенном отдельными участками рельсовом перегоне SST рельсовой сети BNE (SNE?), на рельсовых путях FS, FSW. С привязкой к месту для режима распознавания рельсового пути означает, что для каждого, какого угодно места на рельсовом перегоне BST, по которому может двигаться рельсовое транспортное средство SFZ, может определяться координата BOK места рельсовой дороги, которой может в достаточной степени указываться положение рельсового транспортного средства SFZ, и относительно которой может соответственно регистрироваться рабочая информация BOI о месте и специфическая для рельсового пути рабочая информация BFI, BFWI.
Вместо изображенного рельсового сообщения SVK с едущим по рельсовому перегону SST рельсовой сети SNE рельсовым транспортным средством SFZ здесь также, как уже рассматривалось, в качестве другого примера осуществления изобретения возможна и представима также любая другая, какая угодно система железнодорожного сообщения на базе ближнего или дальнего сообщения. Так, можно было бы вести речь также, напр., о системе сообщения подвесной дороги на магнитной подвеске (ключевое слово: Трансрапид, Маглев и пр.), имеющей соответственно сравнимую инфраструктуру, состоящую из железнодорожной сети, железнодорожного перегона и железнодорожного транспортного средства.
В изображенной на фиг.2 системе рельсового сообщения в моторвагоне TRW рельсового транспортного средства SFZ, имеющем пульт TFS машиниста моторвагона и интегрированное устройство AZE отображения, в котором находится рабочее место машиниста FZF транспортного средства, для регистрации рабочей информации размещено устройство GEV для распознавания рельсового пути. Для этого устройство GEV для распознавания рельсового пути включает в себя предпочтительно снова регистрирующее устройство EFE, которое выполнено в виде прибора BAZG для записи изображений, напр., в виде обычной видеокамеры, лазерного сенсора, тепловой камеры для съемки изображений, радарного устройства, инфракрасной камеры и пр., и в связи со сбором изображений называется также прибором для сбора изображений.
Помимо этого, также для режима (распознавания?) рельсового пути, независимо от того, размещено ли в моторвагоне TRW рельсового транспортного средства SFZ регистрирующее устройство EFE или прибор BAZG для записи изображений, предпочтительно, когда применяются больше одного регистрирующего устройства EFE или прибора BAZG для записи изображений. При этом, когда, напр., регистрирующее устройство EFE или, соответственно, прибор BAZG для записи изображений выходит из строя вследствие повреждения или загрязнения, регистрация референтной информации может, и в любом случае, продолжаться. Кроме того, при параллельной эксплуатации, например, двух регистрирующих устройств EFE или, соответственно, приборов BAZG для записи изображений можно повышать достоверность регистрируемой референтной информации.
С помощью регистрирующего устройства EFE или, соответственно, прибора BAZG для записи изображений, когда едущему по рельсовому пути GL рельсовому транспортному средству SFZ не предстоит обусловленная стрелкой WCH смена GLW рельсового пути, с рельсового транспортного средства SFZ, напр., из перспективы машиниста FZF моторвагона на пульте TFS машиниста моторвагона TRW и/или из неподвижного, обеспечивающего видимость рельсового пути положения в или на транспортном средстве SFZ, для каждой координаты SOK места рельсовой дороги могут регистрироваться/регистрируется рабочая информация ROI о месте и рабочая информация RGI о рельсовом пути.
Если, напротив, едущему по рельсовому пути GL рельсовому транспортному средству SFZ предстоит обусловленная стрелкой WCH смена GLW рельсового пути, то для каждой координаты SOK места рельсовой дороги могут регистрироваться/регистрируется рабочая информация BOI о месте и рабочая информация BGI о рельсовом пути. После этой смены GLW рельсового пути рельсовое транспортное средство SFZ едет уже не по рельсовому пути GL, а по рельсовому пути GLW. Тогда на этом рельсовом пути GLW снова регистрирующим устройством EFE или, соответственно, прибором BAZG для записи изображений с рельсового транспортного средства SFZ могут регистрироваться/регистрируется рабочая информация BOI о месте и рабочая информация BGI о рельсовом пути.
В более общей формулировке: регистрирующим устройством EFE или, соответственно, прибором BAZG для записи изображений, когда едущему по колее FS железнодорожному транспортному средству BFZ не предстоит обусловленная стрелкой WCH смена FSW колеи, с железнодорожного транспортного средства BFZ, напр., из перспективы машиниста FZF моторвагона на пульте TFS машиниста моторвагона TRW и/или из неподвижного, обеспечивающего видимость колеи положения в или на рельсовом транспортном средстве BFZ, для каждой координаты BOK места железной дороги могут регистрироваться/регистрируется первая рабочая информация BOI1 о месте и рабочая информация BFI о колее.
Если, напротив, едущему по колее FS железнодорожному транспортному средству BFZ предстоит обусловленная стрелкой WCH смена FSW колеи, то для каждой координаты BOK места железной дороги могут регистрироваться/регистрируется вторая рабочая информация BOI2 о месте и рабочая информация BFWI о смене колеи. После этой смены FSW колеи железнодорожное транспортное средство BFZ едет уже не по колее FS, а по колее FSW. Тогда на этой колее FSW снова регистрирующим устройством EFE или, соответственно, прибором BAZG для записи изображений с железнодорожного транспортного средства BFZ для каждой координаты BOK места железной дороги могут регистрироваться/регистрируется третья рабочая информация BOI3 о месте и рабочая информация BFI о колее.
В моторвагоне TRW рельсового транспортного средства SFZ в соответствии с изображенной на фиг.2 системой рельсового сообщения также снова дополнительно к устройству GEV для распознавания рельсового пути, имеющему регистрирующее устройство EFE или, соответственно, прибор BAZG для записи изображений, размещено еще устройство RUZE для подсчета оборотов колес, с помощью которого регистрируются обороты колес рельсового транспортного средства SFZ на рельсовом пути GL, и которое для активации устройством GEV для распознавания рельсового пути, когда должны регистрироваться обороты колес, соединено с ним (сравн. также фиг.3 вместе с относящимся к ней описанием).
Как теперь на этом основании выполняется собственно распознавание колеи в железнодорожном сообщении BVK или, соответственно, рельсовом сообщении SVK, описывается ниже с помощью фиг.3-5.
На фиг.3 показана принципиальная конструкция устройства FEV, GEV для распознавания колеи для распознавания колей FS, FSW, GL, GLW, обусловленного или не обусловленного сменой колеи, на основании зарегистрированной референтной информации ROI, RFI, RGI, RFWI, RGWI в референтном режиме в соответствии с фиг.1 и зарегистрированной рабочей информации BOI1, BOI2, BOI3, BFI, BGI, BFWI, BGWI в режиме распознавания колеи в соответствии с фиг.2
Центральными компонентами для этого распознавания в устройстве FEV, GEV для распознавания колеи являются распознающее устройство EKEKEF для непрерывного распознавания колей и распознающее устройство EKEWEF для обусловленного сменой колеи распознавания колей. Функциональное взаимодействие этих двух компонентов с прочими изображенными на фиг.3 компонентами устройства FEV, GEV для распознавания колеи поясняется с привлечением фиг.4 и 5.
На фиг.4 показана принципиальная конструкция распознающего устройства EKEKEF для непрерывного распознавания колей.
При этом исходную точку для этого распознавания колеи образует, в соответствии с рассуждениями к фиг.1 и 2, регистрирующее устройство EFE, BAZG, которые или, соответственно, которое регистрирует референтную информацию ROI о месте и первую и третью рабочую информацию BOI1, BOI3 о месте применительно к географическому окружению, а также референтную информацию RFI, RGI о колее и рабочую информацию BFI, BGI о колее.
Как описано выше при пояснении фиг.1 и 2, регистрация информации в референтном режиме может осуществляться предпочтительно автоматически, а также вручную, в то время как регистрация информации в режиме распознавания колеи предпочтительно всегда осуществляется автоматически. В то время как при регистрации вручную регистрирующее устройство EFE или, соответственно, прибор BAZG для записи изображений активируется или, соответственно, запускается вручную, при автоматической регистрации это требует соответствующего внешнего импульса.
Для этой цели устройство FEV, GEV для распознавания колеи имеет устройство PBE для определения положений, с помощью которого определяется географическое положение железнодорожного транспортного средства BFZ, SFZ на перегоне BST, SST следования, и которое в соответствии с фиг.3 соединено с распознающим устройством EKEKEF для непрерывного распознавания колей. Каким образом определяется положение, имеет второстепенное значение для пояснения этого примера осуществления изобретения и может осуществляться общеизвестным, обычным образом. Так, напр., на базе системы, базирующейся на GPS, или технологии, базирующейся на GPS.
Таким образом, с помощью устройства PBE для определения положений, в частности в режиме определения положения, для каждого, какого угодно места на железнодорожном перегоне BST, SST, по которому может двигаться железнодорожное транспортное средство BFZ, может определяться координата BOK, SOK места железной дороги и тем самым в достаточной степени указываться положение транспортного средства.
Применительно к вышеупомянутому импульсу или, соответственно, триггеру для регистрирующего устройства EFE, BAZG устройством PBE для определения положений генерируется информация BSI о железнодорожном перегоне, в частности информация SSI о рельсовом перегоне, которая вводится в регистрирующее устройство EFE или, соответственно, прибор BAZG для записи изображений для названной цели. Для этого регистрирующее устройство EFE, BAZG имеет управляющий интерфейс STSS. С помощью информации BSI, SSI о железнодорожном перегоне возможно управление регистрирующим устройством EFE, BAZG таким образом, что оно регистрирует
(i) рабочую информацию BOI1, BOI3 о месте применительно к географическому окружению и рабочую информацию BFI, BGI о колее в зависимости от информации BSI, SSI о железнодорожном перегоне для сообщенной в ней координаты BOK, SOK места железной дороги (при автоматической регистрации в режиме распознавания колеи; опция «I») или
(ii) рабочую информацию BOI1, BOI3 применительно к географическому окружению и рабочую информацию BFI, BGI о колее в зависимости от информации BSI, SSI о железнодорожном перегоне для сообщенной в ней координаты BOK, SOK места железной дороги или, соответственно, сообщенной в ней координаты SOK места рельсовой дороги и референтную информацию ROI о месте применительно к географическому окружению и референтную информацию RFI, RGI о колее в зависимости от информации BSI, SSI о железнодорожном перегоне для сообщенного в ней географического положения железнодорожного транспортного средства BFZ, SFZ (при автоматической регистрации в режиме распознавания колеи и референтном режиме; опция «I» и опция «II»).
Регистрирующее устройство EFE, BAZG предпочтительно выполнено таким образом, что для оценки географического окружения и использования колеи в контексте регистрации учитываются точное положение и/или угол регистрации географического окружения и колеи.
В регистрирующем устройстве EFE, BAZG содержится также обрабатывающий компонент BKO, с помощью которого оценивается географическое окружение и использование колеи в контексте регистрации и, в частности, снабжается дополнительными маркировками. Для этого обрабатывающий компонент BKO имеет, например, не изображенный явно на фиг.3 пользовательский интерфейс, через который зарегистрированная референтная информация, напр., снятые изображения, оцениваются людьми-экспертами, напр., машинистом транспортного средства, и маркируются точное положение колеи на записанном изображении, а также ее состояние.
В качестве результата оцененного в контексте регистрации и, в частности, снабженного дополнительными маркировками географического окружения и использования колеи обрабатывающий компонент BKO дает соответствующую, относящуюся к месту контекстную и указательную информацию KHI.
Эта относящаяся к месту контекстная и указательная информация KHI вместе с референтной информацией ROI о месте и референтной информацией RFI, RGI о колее, а также при необходимости полезной и предоставляемой регистрирующим устройством EFE, BAZG, относящейся к месту и контексту регистрации метаинформацией MI, образуют относящиеся к месту референтные данные RDA, которые для распознавания колеи сохраняются в запоминающем устройстве SPE.
Эти референтные данные RDA создаются и сохраняются в памяти предпочтительно статически в специальных поездках или на основании целенаправленной регистрации географического окружения и использования колеи персоналом железнодорожного транспортного средства на железнодорожном перегоне в железнодорожной сети. Статическая регистрация сохраняемых в памяти референтных данных RDA может также предпочтительным образом оптимизироваться, когда эти статические данные динамически дополняются соответственно зарегистрированной рабочей информацией BOI1, BOI3 о месте и соответственно зарегистрированной рабочей информацией BFI, BGI о колее и сохраняются в памяти. В этом запоминающем устройстве SPE, очень обобщенно формулируя, содержатся все необходимые для распознавания колеи референтные данные, включая метаинформацию, а также все данные железнодорожной структуры и железнодорожной инфраструктуры.
В качестве места сохранения в памяти референтных данных RDA запоминающее устройство SPE в соответствии с изображением на фиг.3 либо (опция «A») вне устройства FEV, GEV для распознавания колеи, напр., в виде банка памяти данных в моторвагоне или в облаке данных, предназначено для распознающего устройства EKEKEF для непрерывного распознавания колей, имеющего содержащееся в нем регистрирующее устройство EFE, BAZG, или, соответственно, может соединяться с ним, либо (опция «B»), в качестве компонента устройства FEV, GEV для распознавания колеи соответственно соединено с распознающим устройством EKEKEF для непрерывного распознавания колей и содержащимся в нем регистрирующим устройством EFE, BAZG.
Метаинформация MI предпочтительно предоставляется регистрирующим устройством EFE, BAZG опционально, чтобы лучше и увереннее распознавать колеи FS, FSW, GL, GLW. В качестве дополнительной метаинформации могут привлекаться, напр., калиброванные изображения (напр., из специальной графической лаборатории) из различных перспектив каждой колеи. Метаинформация MI в общем и целом представляет собой информацию, которая в буквальном смысле касается признаков или свойств зарегистрированной информации и информации, полученной в контексте регистрации путем оценки, и она указывает, каким образом осуществляется использование колеи, с помощью генерированной калибровочной информации.
В рамках этого примера осуществления изобретения прибор BAZG для записи изображений, в качестве предпочтительного варианта осуществления регистрирующего устройства EFE, BAZG, предпочтительно для улучшения регистрации референтной информации ROI о месте и рабочей информации BOI1, BOI3 о месте применительно к географическому окружению, а также референтной информации RFI, RGI о колее и рабочей информации BFI, BGI о колее применительно к использованию колеи содержит еще три других компонента, корректирующий компонент KOK, компонент BVK изменения фокусного расстояния и компонент BLK освещения.
С помощью корректирующего компонента KOK при аналитической оценке графического материала приобщаются данные о погоде и освещенности.
С помощью компонента BVK изменения фокусного расстояния в зависимости от расстояния до сигнала выбирается правильный угол съемки, чтобы таким образом оптимально поддерживать аналитическую оценку колеи. При этом может учитываться не только расстояние до колеи, но и различные ситуации съемки. Например, тогда могут надлежащим образом обслуживаться как ситуации съемки на свободном перегоне (требуют изображений из большой удаленности, чтобы на основании скорости можно быть реагировать своевременно), так и ситуации съемки в области вокзала (требуют изображений, имеющих большую ширину).
С помощью компонента BLK освещения, который, например, выполнен в виде прожектора, который работает в пределах или вне видимой человеку области, улучшается качество графического материала, снимаемого прибором BAZG для записи изображений ночью или при плохих погодных условиях.
После того, как выше в описании распознающего устройства EKEKEF для непрерывного распознавания колей в соответствии с фиг.3 с учетом рассуждений к фиг.1 и 2 был пояснен их принцип действия применительно к режиму распознавания колеи предварительно, а применительно к референтному режиму в деталях, далее следует описать, как в режиме распознавания колеи распознающего устройства EKEKEF для непрерывного распознавания колей в деталях выполняется распознавание колеи на основании зарегистрированной регистрирующим устройством EFE, BAZG рабочей информации BOI1, BOI3, BFI, BGI.
Зарегистрированная регистрирующим устройством EFE, BAZG на базе определенной устройством PBE для определения положений рабочей координаты BOK, SOK места, предпочтительно в виде нескольких, снятых c узким временным интервалом изображений географического окружения и использования колеи, рабочая информация BOI1, BOI3 о месте и рабочая информация BFI, BGI о колее вместе с рабочей координатой BOK, SOK места вводятся в устройство PAUE для компенсации положений. Это устройство PAUE для компенсации положений, которое для распознавания колеи включено перед устройством PAE для согласования положений, в котором для распознавания колеи выполняется согласование информации между рабочей информацией и относящейся к месту референтной информацией, изменяет предпочтительно зарегистрированную для определенной координаты BOK, SOK места железной дороги регистрирующим устройством EFE, BAZG рабочую информацию BOI1, BOI3 о месте для компенсации неточности регистрации референтной информации ROI о месте и рабочей информации BOI о месте для согласования информации. При этом производимое в устройстве PAUE для компенсации положений изменение осуществляется с помощью технических приемов искажения.
Применительно к выдаваемым прибором BAZG для записи изображений изображениям это означает, что, возможно, необходимые искажения графического материала определяются, в случае если имеющийся графический материал банка данных изображений вышеназванного запоминающего устройства SPE был снят не точно в том же месте, что и изображения, снятые при специальной поездке. Таким образом, при необходимости компенсация положений снятых изображений рассчитывается на базе информации о положении, т.е. изображения при необходимости несколько искажаются.
Затем измененная рабочая информация BOI1, BOI3 о месте и рабочая информация BFI, BGI о колее для уже упомянутого согласования информации отдаются устройству PAE для согласования положений или, соответственно, передается ему. Затем в этом устройстве PAE для согласования положений та и другая рабочая информация, предпочтительно измененная рабочая информация BOI1, BOI3 о месте и рабочая информация BFI, BGI о колее, согласовываются с сохраненными в запоминающем устройстве SPE, относящимися к месту референтными данными RDA. Это согласование осуществляется таким образом, что рабочая информация BOI1, BOI3 о месте согласовывается с референтной информацией ROI о месте, а рабочая информация BFI, BGI о колее с референтной информацией RFI, RGI о колее применительно к рабочей информации BOI1, BOI3 о месте и соответствующей ей референтной информации ROI о месте на основании сохраненных в памяти референтных данных RDA таким образом, что зарегистрированная рабочая информация BFI, BGI о колее для распознавания колеи, при котором для каждой определенной координаты BOK, SOK места железной дороги должна распознаваться используемая железнодорожным транспортным средством BFZ, SFZ колея FS, GL и/или используемая железнодорожным транспортным средством BFZ, SFZ обусловленным сменой FSW, GLW колеи образом колея FSW, GLW, найдена, когда рабочая информация BFI, BGI о колее применительно к рабочей информации BOI1, BOI3 о месте и соответствующей ей референтной информации ROI о месте соответствует содержащейся в референтных данных RDA референтной информации RFI, RGI о колее с учетом содержащейся в референтных данных RDA контекстной и указательной информации KHI или, соответственно, контекстной и указательной информации KHI и метаинформации MI.
Устройство PAE для согласования положений предпочтительно выполнено таким образом, что согласование информации для распознавания колей FS, FSW, GL, GLW выполняется непрерывно.
Альтернативно этому возможно также, чтобы устройство PAE для согласования положений было выполнено таким образом, чтобы согласование информации для распознавания колей FS, FSW, GL, GLW выполнялось с интервалами распознавания, при этом для констатируемого соответствия рассчитывается степень похожести между той и другой зарегистрированной при эксплуатации рабочей информацией BFI, BGI о колее применительно к по меньшей мере дважды совместно зарегистрированной при этом рабочей информации BOI о месте, или в ходе графической регистрации зарегистрированной при эксплуатации рабочей информации BFI, BGI о колее применительно к по меньшей мере дважды совместно зарегистрированной при этом рабочей информации BOI о месте с помощью алгоритмов распознавания кромок ход используемой железнодорожным транспортным средством BFZ, SFZ колеи FS, GL, FSW, GLW распознавался по изменяющейся на зарегистрированном изображении доле изображения колеи FS, GL, FSW, GLW по отношению ко всему зарегистрированному изображению и сравнивался с содержащимися в метаинформации MI, касающимися железнодорожного перегона данными.
Применительно к изображениям, выдаваемым прибором BAZG для записи изображений, это означает, что снятые во время регулярной рабочей поездки изображения согласовываются с оцененными, напр., экспертом или, соответственно, машинистом транспортного средства, и маркированными изображениями, а также при необходимости другими метаданными и калибровочными изображениями, чтобы можно было распознавать используемую железнодорожным транспортным средством BFZ, SFZ колею FS, GL, FSW, GLW. При этом маркировка применяется, чтобы можно было как можно точнее устанавливать релевантный фрагмент изображения, а также различать релевантные и нерелевантные колеи (напр., колея второстепенного перегона). Для согласования цвета при необходимости используются выделяющиеся элементы изображений в окружении колеи, такие как белые таблички.
Когда таким образом распознана используемая железнодорожным транспортным средством BFZ, SFZ колея FS, GL, FSW, GLW, то устройством PAE для согласования положений в распознающем устройстве EKEKEF для непрерывного распознавания колей создается представляющая распознанную колею FS, GL первая информация FSI1 о колее.
Эта первая информация FSI1 о колее в соответствии с изображением на фиг.3 передается распознающим устройством EKEKEF для непрерывного распознавания колей вычислительному/анализирующему устройству BAWE в устройстве FEV, GEV для распознавания колеи.
Что происходит с первой информацией FSI1 о колее в вычислительном/анализирующем устройстве BAWE устройства FEV, GEV для распознавания колеи дальше, поясняется в связи с дальнейшим описанием фиг.3 после следующего описания фиг.5.
На фиг.5 (показана?) принципиальная конструкция распознающего устройства EKEKEF для непрерывного распознавания колей.
При этом исходную точку для этого обусловленного сменой колеи распознавания колеи образует, в соответствии с рассуждениями к фиг.1 и 2, регистрирующее устройство EFE, BAZG, которые или, соответственно, которое регистрирует референтную информацию ROI о месте и вторую рабочую информацию BIO2 о месте применительно к географическому окружению, а также референтную информацию RFWI, RGWI о смене колеи и рабочую информацию BFWI, BGWI о смене колеи.
Как описано выше при пояснении фиг.1 и 2, регистрация информации в референтном режиме может осуществляться предпочтительно автоматически, а также вручную, в то время как регистрация информации в обусловленном сменой колеи режиме распознавания колеи предпочтительно всегда осуществляется автоматически. В то время как при регистрации вручную регистрирующее устройство EFE или, соответственно, прибор BAZG для записи изображений активируется или, соответственно, запускается вручную, при автоматической регистрации это требует соответствующего внешнего импульса.
Для этой цели устройство FEV, GEV для распознавания колеи имеет устройство PBE для определения положений, с помощью которого определяется географическое положение железнодорожного транспортного средства BFZ, SFZ на железнодорожном перегоне BST, SST следования, и которое в соответствии с фиг.3 опосредствованно, через вычислительное/анализирующее устройство BAWE соединено с распознающим устройством EKEKEF для обусловленного сменой колеи распознавания колей. Каким образом определяется положение, имеет второстепенное значение для пояснения этого примера осуществления изобретения и может осуществляться общеизвестным, обычным образом. Так, напр., на базе системы, базирующейся на GPS, или технологии, базирующейся на GPS.
Таким образом, с помощью устройства PBE для определения положений, в частности в режиме распознавания колеи, для каждого, какого угодно места на железнодорожном перегоне BST, SST, по которому может двигаться железнодорожное транспортное средство BFZ, SFZ, может определяться координата BOK, SOK места железной дороги и тем самым в достаточной степени указываться положение транспортного средства.
Что касается вышеупомянутого импульса или, соответственно, триггера для регистрирующего устройства EFE, BAZG, устройством PBE определения положений генерируется информация BSI о железнодорожном перегоне, в частности информация SSI о рельсовом перегоне. Эта информация BSI, SSI о железнодорожном перегоне вводится в регистрирующее устройство EFE или, соответственно, прибор BAZG для записи изображений в соответствии с изображением на фиг.3 через вычислительное/анализирующее устройство BAWE в виде соответствующей триггерной информации TI, причем эта триггерная информация TI создается в вычислительном/анализирующем устройстве BAWE на основании принятой там, дающей импульс или, соответственно, триггер информации BSI, SSI о железнодорожном перегоне и первой информации FSI1 о колее.
Другими словами: распознающее устройство EKEKEF для обусловленного сменой колеи распознавания колей и вместе с тем содержащееся в нем регистрирующее устройство EFE, BAZG через соединение «вычислительное/анализирующее устройство BAWE и устройство PBE для определения положений» получают указанное координатой BOK, SOK места железной дороги положение железнодорожного транспортного средства BFZ, SFZ.
Для этого регистрирующее устройство EFE, BAZG имеет управляющий интерфейс STSS. С помощью информации BSI, SSI о железнодорожном перегоне возможно управление регистрирующим устройством EFE, BAZG таким образом, что оно регистрирует
(i) рабочую информацию BOI2 о месте применительно к географическому окружению и рабочую информацию BFWI, BGWI о смене колеи в зависимости от информации BSI, SSI о железнодорожном перегоне для сообщенной в ней координаты BOK, SOK места железной дороги (при автоматической регистрации в режиме обусловленного сменой колеи распознавания колеи; опция «I») или
(ii) рабочую информацию BOI2 о месте применительно к географическому окружению и рабочую информацию BFWI, BGWI о смене колеи в зависимости от информации BSI, SSI о железнодорожном перегоне для сообщенной в ней координаты BOK, SOK места железной дороги или, соответственно, сообщенной в ней координаты SOK места рельсовой дороги и референтную информацию ROI о месте применительно к географическому окружению и референтную информацию RFWI, RGWI о смене колеи в зависимости от информации BSI, SSI о железнодорожном перегоне для сообщенного в ней географического положения железнодорожного транспортного средства BFZ, SFZ (при автоматической регистрации в режиме обусловленного сменой колеи распознавания колеи и референтном режиме; опция «I» и опция «II»).
Регистрирующее устройство EFE, BAZG предпочтительно выполнено таким образом, что для оценки географического окружения и обусловленного сменой колеи использования колеи в контексте регистрации учитываются точное положение и/или угол регистрации географического окружения и колеи.
В регистрирующем устройстве EFE, BAZG содержится также обрабатывающий компонент BKO, с помощью которого оценивается географическое окружение и обусловленное сменой колеи использование колеи в контексте регистрации и, в частности, снабжается дополнительными маркировками. Для этого обрабатывающий компонент BKO имеет, например, не изображенный явно на фиг.3 пользовательский интерфейс, через который зарегистрированная референтная информация, напр., снятые изображения, оцениваются людьми-экспертами, напр., машинистом транспортного средства, и маркируются точное положение колеи на записанном изображении, а также ее состояние.
В качестве результата оцененного в контексте регистрации и, в частности, снабженного дополнительными маркировками географического окружения и обусловленного сменой колеи использования колеи обрабатывающий компонент BKO дает соответствующую, относящуюся к месту контекстную и указательную информацию KHI.
Эта относящаяся к месту контекстная и указательная информация KHI вместе с референтной информацией ROI о месте и референтной информацией RFI, RGI о колее, а также при необходимости полезной для распознавания колеи и предоставляемой регистрирующим устройством EFE, BAZG, относящейся к месту и контексту регистрации метаинформацией MI, образуют относящиеся к месту референтные данные RDA, которые для обусловленного сменой колеи распознавания колеи сохраняются в запоминающем устройстве SPE.
Эти референтные данные RDA создаются и сохраняются в памяти предпочтительно статически в специальных поездках или на основании целенаправленной регистрации географического окружения и использования колеи персоналом железнодорожного транспортного средства на железнодорожном перегоне в железнодорожной сети. Статическая регистрация сохраняемых в памяти референтных данных RDA может также предпочтительным образом оптимизироваться, когда эти статические данные динамически дополняются соответственно зарегистрированной рабочей информацией BOI2 о месте и соответственно зарегистрированной рабочей информацией BFWI, BGWI о смене колеи и сохраняются в памяти. В этом запоминающем устройстве SPE, очень обобщенно формулируя, содержатся все необходимые для распознавания колеи референтные данные, включая метаинформацию, а также все данные железнодорожной структуры и железнодорожной инфраструктуры.
В качестве места сохранения в памяти референтных данных RDA запоминающее устройство SPE в соответствии с изображением на фиг.3 либо (опция «A») вне устройства FEV, GEV для распознавания колеи, напр., в виде банка памяти данных в моторвагоне или в облаке данных, предназначено для распознающего устройства EKEKEF для обусловленного сменой колеи распознавания колей, имеющего содержащееся в нем регистрирующее устройство EFE, BAZG, или, соответственно, может соединяться с ним, либо (опция «B»), в качестве компонента устройства FEV, GEV для распознавания колеи соответственно соединено с распознающим устройством EKEKEF для обусловленного сменой колеи распознавания колей и содержащимся в нем регистрирующим устройством EFE, BAZG.
Метаинформация MI предпочтительно предоставляется регистрирующим устройством EFE, BAZG опционально, чтобы лучше и увереннее распознавать колеи FS, FSW, GL, GLW. В качестве дополнительной метаинформации могут, напр., привлекаться калиброванные изображения (напр., из специальной графической лаборатории) из различных перспектив каждой колеи, обусловленной сменой колеи. Метаинформация MI в общем и целом представляет собой информацию, которая в буквальном смысле касается признаков или свойств зарегистрированной информации и информации, полученной в контексте регистрации путем оценки, и она указывает, каким образом осуществляется обусловленное сменой колеи использование колеи, с помощью генерированной калибровочной информации.
В рамках этого примера осуществления изобретения прибор BAZG для записи изображений, в качестве предпочтительного варианта осуществления регистрирующего устройства EFE, BAZG, предпочтительно для улучшения регистрации референтной информации ROI о месте и рабочей информации BOI2 о месте применительно к географическому окружению, а также референтной информации RFWI, RGWI о смене колеи и рабочей информации BFWI, BGWI о смене колеи применительно к обусловленному сменой колеи использованию колеи содержит еще три других компонента, корректирующий компонент KOK, компонент BVK изменения фокусного расстояния и компонент BLK освещения.
С помощью корректирующего компонента KOK при аналитической оценке графического материала приобщаются данные о погоде и освещенности.
С помощью компонента BVK изменения фокусного расстояния в зависимости от расстояния до сигнала выбирается правильный угол съемки, чтобы таким образом оптимально поддерживать аналитическую оценку распознавания. При этом может учитываться не только расстояние до колеи, но и различные ситуации съемки. Например, тогда могут надлежащим образом обслуживаться как ситуации съемки на свободном перегоне (требуют изображений из большой удаленности, чтобы на основании скорости можно быть реагировать своевременно), так и ситуации съемки в области вокзала (требуют изображений, имеющих большую ширину).
С помощью компонента BLK освещения, который, например, выполнен в виде прожектора, который работает в пределах или вне видимой человеку области, улучшается качество графического материала, снимаемого прибором BAZG для записи изображений ночью или при плохих погодных условиях.
После того, как выше в описании распознающего устройства EKEKEF для обусловленного сменой колеи распознавания колей в соответствии с фиг.3 с учетом рассуждений к фиг.1 и 2 был пояснен их принцип действия применительно к режиму распознавания колеи предварительно, а применительно к референтному режиму в деталях, далее следует описать, как в режиме распознавания колеи распознающего устройства EKEKEF для обусловленного сменой колеи распознавания колей в деталях выполняется обусловленное сменой колеи распознавание колеи на основании зарегистрированной регистрирующим устройством EFE, BAZG рабочей информации BOI2, BWFI, BWGI.
Зарегистрированная регистрирующим устройством EFE, BAZG на базе определенной устройством PBE для определения положений рабочей координаты BOK, SOK места, предпочтительно в виде нескольких снятых c узким временным интервалом изображений географического окружения и обусловленного сменой колеи использования колеи, рабочая информация BOI2 о месте и рабочая информация BWFI, BWGI о смене колеи вместе с рабочей координатой BOK, SOK места вводятся в устройство PAUE для компенсации положений. Это устройство PAUE для компенсации положений, которое для обусловленного сменой колеи распознавания колеи включено перед устройством PAE для согласования положений, в котором для распознавания колеи выполняется согласование информации между рабочей информацией и относящейся к месту референтной информацией, изменяет предпочтительно зарегистрированную для определенной координаты BOK, SOK места железной дороги регистрирующим устройством EFE, BAZG рабочую информацию BOI2 о месте для компенсации неточности регистрации референтной информации ROI о месте и рабочей информации BOI о месте для согласования информации. При этом производимое в устройстве PAUE для компенсации положений изменение осуществляется с помощью технических приемов искажения.
Применительно к выдаваемым прибором BAZG для записи изображений изображениям это означает, что, возможно, необходимые искажения графического материала определяются, в случае если имеющийся графический материал банка данных изображений вышеназванного запоминающего устройства SPE был снят не точно в том же месте, что и изображения, снятые при специальной поездке. Таким образом, при необходимости компенсация положений снятых изображений рассчитывается на базе информации о положении, т.е. изображения при необходимости несколько искажаются.
Затем измененная рабочая информация BOI2 о месте и рабочая информация BWFI, BWGI о смене колеи для уже упомянутого согласования информации отдается устройству PAE для согласования положений или, соответственно, передается ему. Затем в этом устройстве PAE для согласования положений та и другая рабочая информация, предпочтительно измененная рабочая информация BOI2 о месте и рабочая информация BWFI, BWGI о смене колеи, согласовывается с сохраненными в запоминающем устройстве SPE относящимися к месту референтными данными RDA. Это согласование осуществляется таким образом, что рабочая информация BOI2 о месте согласовывается с референтной информацией ROI о месте, а рабочая информация BFWI, BGWI о смене колеи с референтной информацией RFWI, RGWI о смене колеи применительно к рабочей информации BOI2 о месте и соответствующей ей референтной информации ROI о месте на основе сохраненных в памяти референтных данных RDA таким образом, что зарегистрированная рабочая информация BFWI, BGWI о смене колеи для обусловленного сменой колеи распознавания колеи, при котором для определенной координаты BOK, SOK места железной дороги должна распознаваться предстоящая железнодорожному транспортному средству BFZ, SFZ смена FSW, GLW колеи, найдена, когда рабочая информация BFWI, BGWI о смене колеи применительно к рабочей информации BOI2 о месте и соответствующей ей референтной информации ROI о месте соответствует содержащейся в референтных данных RDA референтной информации RFWI, RGWI о смене колеи с учетом содержащейся в референтных данных RDA контекстной и указательной информации KHI или, соответственно, контекстной и указательной информации KHI и метаинформации MI.
Устройство PAE для согласования положений предпочтительно выполнено таким образом, что согласование информации для распознавания смены FSW, GLW колеи выполняется непрерывно.
Применительно к изображениям, выдаваемым прибором BAZG для записи изображений, это означает, что снятые во время регулярной рабочей поездки изображения согласовываются с оцененными, напр., экспертом или, соответственно, машинистом транспортного средства, и маркированными изображениями, а также при необходимости другими метаданными и калибровочными изображениями, чтобы можно было распознавать используемую железнодорожным транспортным средством BFZ, SFZ колею FS, GL. При этом маркировка применяется, чтобы можно было как можно точнее устанавливать релевантный фрагмент изображения, а также различать релевантные и нерелевантные смены колеи (напр., стрелка второстепенного перегона). Для согласования цвета при необходимости используются выделяющиеся элементы изображений в окружении стрелки, такие как белые таблички.
Когда таким образом распознана предстоящая железнодорожному транспортному средству BFZ, SFZ смена FSW, GLW колеи, то устройством PAE для согласования положений в распознающем устройстве EKEKEF для обусловленного сменой колеи распознавания колей создается представляющая распознанную смену FSW, GLW колеи или, соответственно, представляющая распознанную обусловленную сменой колеи колею FSW, GLW информация FSIW о колее.
Эта информация FSIW о колее в соответствии с изображением на фиг.3 передается распознающим устройством EKEKEF для обусловленного сменой колеи распознавания колей вычислительному/анализирующему устройству BAWE в устройстве FEV, GEV для распознавания колеи.
Распознающее устройство EKEKEF для обусловленного сменой колеи распознавания колей/рельсовых путей выполнено, помимо этого, предпочтительно так, что распознавание колеи FSW, GLW, которое обусловлено сменой FSW, GLW колеи, осуществляется таким образом, что зарегистрированная применительно к географическому окружению первая рабочая информация BOI1 о месте из перспективы железнодорожного транспортного средства BFZ, SFZ регистрируется перед сменой FSW, GLW колеи спереди, напр., с помощью расположенного в моторвагоне TRW железнодорожного транспортного средства BFZ, SFZ, предпочтительно выполненного в виде прибора для записи изображений, напр., камеры, регистрирующего устройства EFE, BAZG, а после смены FSW, GLW колеи сзади, напр., с помощью размещенного в конце железнодорожного транспортного средства BFZ, SFZ, предпочтительно выполненного в виде прибора для записи изображений, напр., камеры, регистрирующего устройства EFE, BAZG.
Что теперь происходит дальше с первой информацией FSI1 о колее и информацией FSIW о колее в вычислительном/оценивающем устройстве BAWE устройства FEV, GEV для распознавания колеи, поясняется в связи с дальнейшим описанием фиг.3.
Но прежде чем подробно остановиться на этом, в связи с фиг.3 будут еще представлены другие компоненты устройства FEV, GEV для распознавания колеи и их принцип действия в сочетании с некоторыми вышеупомянутыми компонентами.
Во-первых, устройство FEV, GEV для распознавания колеи предпочтительно содержит еще распознающее устройство EKEKEF для событийно управляемого распознавания колей, которое выполнено и соединено с устройством IRE для регистрации информации таким образом, что
1) для распознавания используемой железнодорожным транспортным средством BFZ, SFZ колеи FS, FSW, GL, GLW распознавание колеи FS, GL, которое обусловлено или не обусловлено сменой FSW, GLW колеи, выполняется с событийным управлением, при этом аналитически оценивается предоставленная устройством IRE для регистрации информации информация BSTI о железнодорожном перегоне, которая поступает в виде посылаемых сигналов компонентов железнодорожного перегона, таких как, например, сигналы, активно посылаемые маяками, или сигналы, пассивно посылаемые вследствие сотрясений стрелок WCH, и
2) полученная из аналитически оцененной информации BSTI о железнодорожном перегоне, представляющая распознанную колею FS, FSW, GL, GLW вторая информация FSI2 о колее передается или, соответственно, может передаваться вычислительному/анализирующему устройству BAWE.
Во-вторых, помимо этого еще предпочтительно предусмотрено соединение, которое, напр., выполнено в виде соединения мобильной связи, с внешней станцией AWS аналитической оценки, причем возникший при этом функциональный блок выполнен таким образом, что статически созданные референтные данные RDA или статически созданные референтные данные RDA и дополняющие их динамически созданные рабочие данные BOI, BFI, BGI, BFWI, BGWI согласовываются с соответствующими данными других железнодорожных транспортных средств одной общей представительной выборки железнодорожных транспортных средств и для этого распределяются.
Функция этой, напр., придорожной станции AWS аналитической оценки заключается в том, что там, где с помощью устройства FEV, GEV для распознавания колеи на основании зарегистрированных изображений (рабочие данные BFI, BGI, BFWI, BGWI) распознавание колеи возможно только с высоким коэффициентом неопределенности, сохраненные в станции AWS аналитической оценки изображения, данные и информация устройства FEV, GEV для распознавания колеи предоставляются в распоряжение для модифицированной аналитической оценки. Затем эти изображения, данные и информация могут аналитически оцениваться человеком-экспертом, и затем эта информация может снова возвращаться в запоминающее устройство SPE устройства FEV, GEV для распознавания колеи.
1. При достаточной ширине полосы связи и наличии людей-экспертов это может осуществляться даже в реальном времени таким образом, что результат аналитической оценки может использоваться для управления железнодорожным транспортным средством.
2. Помимо этого, с помощью придорожной станции AWS аналитической оценки может согласовываться и распределяться графический материал железнодорожных транспортных средств одной представительной выборки или нескольких представительных выборок.
Альтернативно станции AWS аналитической оценки для модифицированной оценки изображений, для которых аналитическая оценка возможна только с высоким коэффициентом неопределенности, возможно также, чтобы машинист поезда или сравнимый железнодорожный служащий, который с целью оформления пассажиров, так или иначе, ездит на рельсовом транспортном средстве, с помощью мобильного прибора оценивал изображения, данные и информацию, имеющие высокий коэффициент неопределенности, так, как это делает человек-эксперт в отношении изображений в станции AWS аналитической оценки.
В последнюю очередь, тогда возможно также, чтобы с помощью устройства GEV для распознавания рельсового пути в случае рельсовых транспортных средств в соответствии с фиг.2, могла создаваться координата SOK места рельсовой дороги, которая указывает положение рельсового транспортного средства SFZ, в дополнение или альтернативно предоставляемой устройством PBE для определения положений координате SOK места рельсовой дороги, при этом функциональный блок, который образован из (a) соединенного с вычислительным/анализирующим устройством BAWE и устройством PBE для определения положений инициализирующего устройства ISE, (b) соединенного с вычислительным/анализирующим устройством BAWE устройства RUZE для подсчета оборотов колес, (c) вычислительного/анализирующего устройства BAWE, (d) устройства PBE для определения положений и (e) распознающего устройства EKEKEF для непрерывного распознавания колей или распознающего устройства EKEKEF для обусловленного сменой колеи распознавания колей, выполнен таким образом, что
I.) исходя из инициализированного, сохраненного в инициализирующем устройстве ISE положения рельсового пути, которое указывает положение рельсового транспортного средства SFZ на распознанном в последнюю очередь распознающим устройством EKEKEF для непрерывного распознавания колей или распознающим устройством EKEKEF для обусловленного сменой колеи распознавания колей и аналитически оцененном вычислительным/анализирующим устройством BAWE рельсовом пути GL, GLW, в устройстве RUZE для подсчета оборотов колес регистрируется количество оборотов колес рельсового транспортного средства SFZ на распознанном рельсовом пути GL, GLW;
II.) из численно зарегистрированных оборотов колес в вычислительном/анализирующем устройстве BAWE рассчитывается значение отрезка пути, пройденного на рельсовом пути GL, GLW;
III.) в вычислительном/анализирующем устройстве BAWE рассчитанное значение отрезка пути распознающим устройством EKEKEF для непрерывного распознавания колей или распознающим устройством EKEKEF для обусловленного сменой колеи распознавания колей/рельсовых путей, зарегистрированная на пройденном отрезке пути рельсового пути рабочая информация BOI о месте и рабочая информация BGI о рельсовом пути и/или зарегистрированная на пройденном отрезке пути рельсового пути рабочая информация BOI о месте и рабочая информация BGWI о смене рельсового пути корректируется с учетом содержащихся в референтных данных RDA для этого отрезка пути контекстной и указательной информации KHI или контекстной и указательной информации KHI и метаинформации MI;
IV.) в вычислительном/анализирующем устройстве BAWE определяется выделяющаяся, зарегистрированная по информации BOI, BGI, BGWI и по метаинформации MI точка отрезка пути одного из компонентов железнодорожного перегона, напр., местонахождение стрелки WCH, маяка, сигнализирующей и направляющей установки и пр.;
V.) в вычислительном/анализирующем устройстве BAWE расстояние от рельсового транспортного средства (SFZ) до известной точки отрезка пути определяется таким образом, что
V.1) для выделяющейся точки отрезка пути путем регистрации рабочей информации BGI о рельсовом пути и рабочей информации BOI о месте или путем регистрации рабочей информации BGWI о смене рельсового пути и рабочей информации BOI о месте находится ширина рельсов, или
V.2) для выделяющейся точки отрезка пути на базе сравнения, с одной стороны, зарегистрированной рабочей информации BOI о месте и рабочей информации BGI о рельсовом пути или зарегистрированной рабочей информации BOI о месте и рабочей информации BGWI о смене рельсового пути, а также, с другой стороны, соответствующей каждой из них, зарегистрированной референтным образом референтной информации ROI о месте и референтной информации RGI о рельсовом пути или соответствующей каждой из них, зарегистрированной референтным образом референтной информации ROI о месте и референтной информации RGWI о смене рельсового пути, размер этого компонента железнодорожного перегона в рабочей информации BOI, BGI, BGWI сравнивается с размером этого компонента железнодорожного перегона в референтной информации ROI, RGI, RGWI, и
VI.) для выделяющейся точки отрезка пути найденное таким образом положение представляет собой как новое инициализированное положение рельсового пути, так и созданную координату SOK места рельсовой дороги, которая сохраняется/которые сохраняются или, соответственно, может /могут сохраняться в памяти в инициализирующем устройстве ISE и вводятся/вводится или, соответственно, может/могут вводиться в устройство PBE для определения положений.
В этой связи ссылаемся на альтернативное определение положений в рельсовом сообщении, когда традиционное определение положений со спутниковой поддержкой не срабатывает или является недостаточным, в соответствии с заявкой на патент DE (заявка № 102016224355.1) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
Теперь, в конце описания фиг.3, вернемся снова к тому аспекту, когда первая информация FSI1 о колее и информация FSIW о колее были переданы вычислительному/анализирующему устройству BAWE в устройстве FEV, GEV для распознавания колеи. Дополнительно к этой названной той и другой информации вычислительному/анализирующему устройству BAWE от распознающего устройства EKEKEF для событийно управляемо распознавания колей была передана вторая информация FSI2 о колее.
Вычислительное/анализирующее устройство BAWE генерирует из названной информации FSI1, FSIW, FSI2 о колее управляющую информацию STI, которая передается устройству STE управления. Устройство STE управления предпочтительно содержится в устройстве FEV, GEV для распознавания колеи (опция «C» на фиг.3). Но альтернативно возможно также, чтобы оно было интегрировано, имплементировано или размещено вне устройства FEV, GEV для распознавания колеи, напр., на пульте TFS машиниста моторвагона железнодорожного транспортного средства BFZ, SFZ (опция «D» на фиг.3).
Итак, устройство STE управления выполнено таким образом, что из переданной информации FSI1, FSIW, FSI2 о колее применительно к распознанной используемой колее FS, FSW, GL, GLW, а также с учетом сохраненной в банке (DAB) данных информации BFBTI о железнодорожном транспортном средстве/железнодорожной технике, в частности информации SFSTI о рельсовом транспортном средстве/рельсовой технике, которая касается технического механизма регулирования железнодорожного транспортного средства, в частности технического механизма регулирования рельсового транспортного средства, а также атрибутов и способностей железнодорожного транспортного средства, в частности атрибутов и способностей рельсового транспортного средства, и считывается устройством STE управления из банка DAB данных, рассчитывается или выводится по меньшей мере одно действие FAK ведения, которое отображается на устройстве AZE отображения машинисту FZF транспортного средства на пульте TFS машиниста моторвагона железнодорожного транспортного средства BFZ, SFZ в качестве рекомендации, применяется в качестве валидации команды ведения или передается Автоматической Системе AFS ведения железнодорожного транспортного средства BFZ, SFZ для автоматической реализации действия FAK ведения.
Относительно принадлежности и/или местонахождения банка DAB данных имеет силу то же, что и для запоминающего устройства SPE.
С помощью вышеописанного устройства FEV, GEV для распознавания колеи возможно ассистирование или, соответственно, даже реализация автоматизированного (автономного) или с участием машиниста ведения железнодорожного транспортного средства BFZ без дополнительной инфраструктуры по некоторому перегону следования. Это имеет место, в частности, тогда, когда устройство FEV, GEV для распознавания колеи реализовано в виде виртуальной машины, которая выполнена и функционирует как «Software Defined Signal Recognition of Rail Traffic Systems» (англ. программно-определяемое распознавание сигналов систем железнодорожного транспорта).
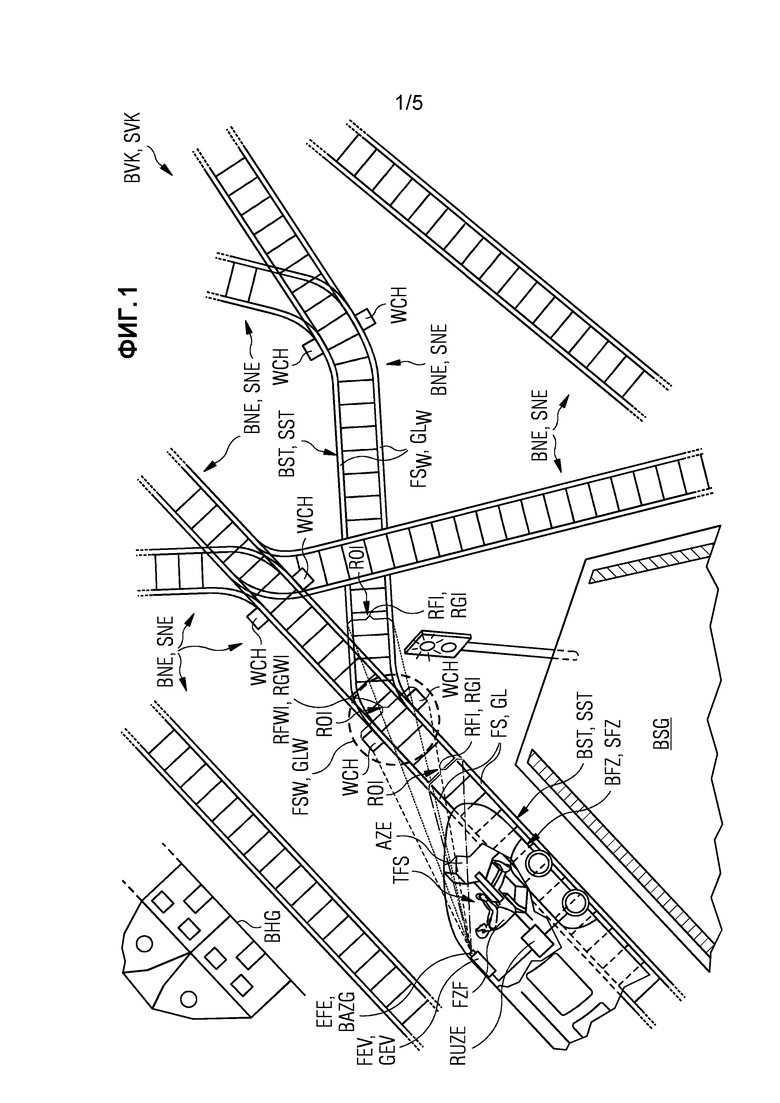
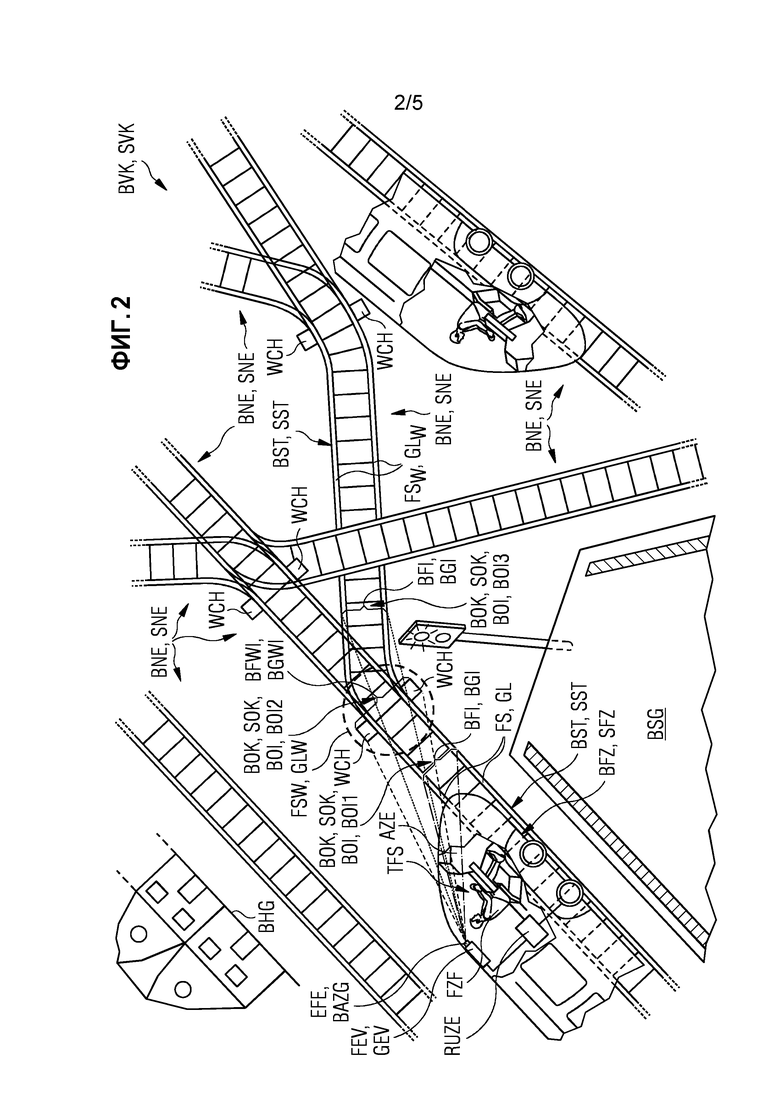
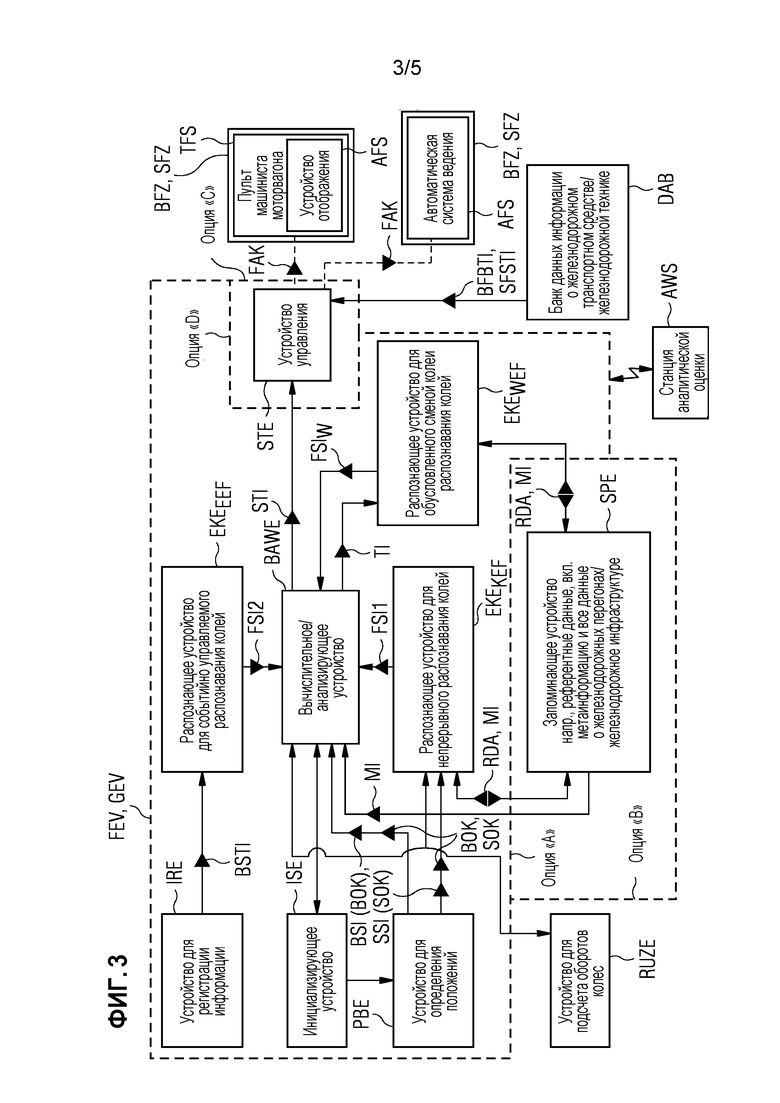
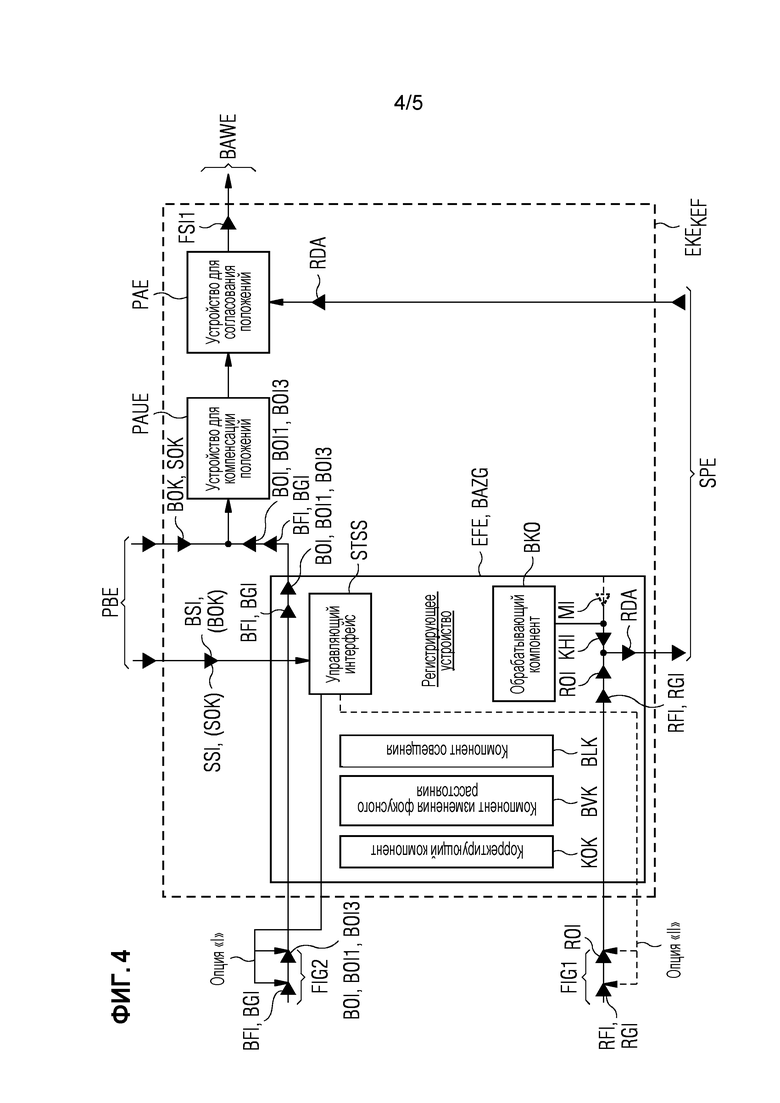

Изобретение относится к средствам автоматического распознавания колей (FS, GL) в железнодорожном сообщении (BVK, SVK). На базе (i), сохраненной в качестве референтных данных (RDA), зарегистрированной на железнодорожном перегоне (BST, SST) в железнодорожной сети применительно к географическому окружению и использованию колеи в железнодорожном сообщении, относящейся к месту референтной информации в виде референтной информации (ROI) о месте, референтной информации (RFI, RGI) о колее и референтной информации (RFWI, RGWI) о смене колеи, полученной в контексте регистрации контекстной и указательной информации (KHI) и при необходимости дополнительной относящейся к ней метаинформации (MI), а также (ii) согласования зарегистрированной в режиме распознавания колеи на основе данных о положении рабочей информации (BOI) о месте и рабочей информации (BFI, BGI) о колее или рабочей информации (BFWI, BGWI) о смене колеи с сохраненными в памяти референтными данными (RDA), распознают использование колеи путем аналитической оценки релевантности и содержания информации. Достигается повышение автоматизации распознавания рельсовых путей. 3 н. и 40 з.п. ф-лы, 5 ил.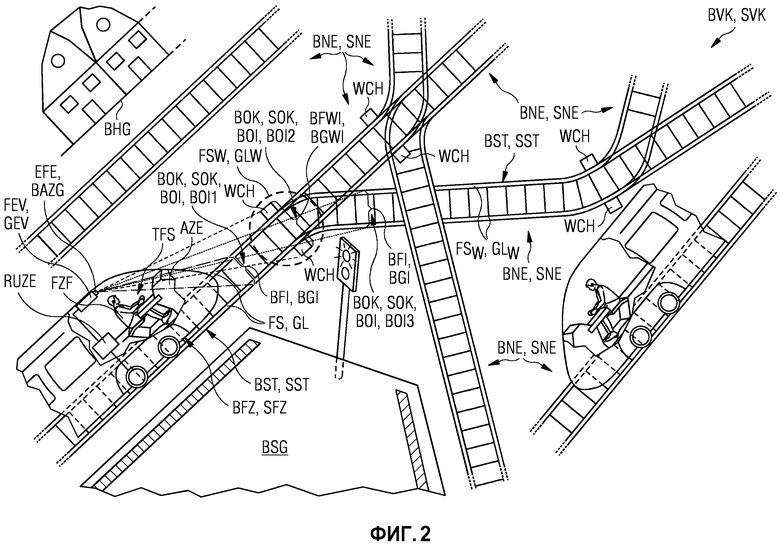
1. Способ распознавания колеи в железнодорожном сообщении (BVK), в частности для распознавания рельсового пути в рельсовом сообщении (SVK), при котором:
a) ходы железнодорожных перегонов (BST), в частности рельсовых перегонов (SST), в железнодорожной сети (BNE), в частности рельсовой сети (SNE), по меньшей мере частично и по существу применительно к географическому окружению и использованию колеи, в частности использованию рельсового пути, обусловленному или не обусловленному сменой колеи, в частности сменой рельсового пути, в железнодорожном сообщении (BVK, SVK) на железнодорожном перегоне (BST, SST) регистрируются с привязкой к месту в виде референтной информации (ROI) о месте, референтной информации (RFI) о колее, в частности референтной информации (RGI) о рельсовом пути, и референтной информации (RFWI) о смене колеи, в частности называемой референтной информацией о стрелке референтной информации (RGWI) о смене рельсового пути, а также оценивается географическое окружение и использование колеи с или без предшествующей смены колеи железнодорожным сообщением (BVK, SVK) в контексте регистрации, в частности снабжается дополнительными маркировками, и
b) сохраняются в памяти относящиеся к месту референтные данные (RDA), которые дополнительно к зарегистрированной референтной информации (ROI) о месте, относящейся к месту референтной информации (RFI, RGI) о колее, референтной информации (RFWI, RGWI) о смене колеи содержат либо относящуюся к месту, полученную из оценки контекстную и указательную информацию (KHI), либо относящуюся к месту, полученную из оценки контекстную и указательную информацию (KHI), а также относящуюся к месту и контексту регистрации метаинформацию (MI),
отличающийся тем, что
в режиме распознавания колеи, в частности режиме распознавания рельсового пути,
c) для каждого, какого угодно места на железнодорожном перегоне (BST), по которому может двигаться железнодорожное транспортное средство (BFZ), в частности рельсовое транспортное средство (SFZ), может определяться координата (BOK) места железной дороги, в частности координата (SOK) места рельсовой дороги, которой может в достаточной степени указываться положение транспортного средства (BFZ, SFZ),
d) для каждой определенной координаты (BOK, SOK) места железной дороги регистрируются рабочая информация (BOI) о месте применительно к географическому окружению и рабочая информация (BFI) о колее, в частности рабочая информация (BGI) о рельсовом пути, или рабочая информация (BOI) о месте применительно к географическому окружению и рабочая информация (BFWI) о смене колеи, в частности рабочая информация (BGWI) о смене рельсового пути;
e1) первая рабочая информация (BOI, BOI1) о месте согласовывается с референтной информацией (ROI) о месте, f рабочая информация (BFI, BGI) о колее с референтной информацией (RFI, RGI) о колее применительно к первой рабочей информации (BOI, BOI1) о месте и соответствующей ей референтной информации (ROI) о месте на основании сохраненных в памяти референтных данных (RDA) таким образом, что зарегистрированная рабочая информация (BFI, BGI) о колее для распознавания колеи, при котором для определенной координаты (BOK, SOK) места железной дороги должна распознаваться используемая железнодорожным транспортным средством (BFZ, SFZ) колея (FS), в частности используемый рельсовый путь (GL), найдена, когда рабочая информация (BFI, BGI) о колее соответствует содержащейся в референтных данных (RDA) референтной информации (RFI, RGI) о колее с учетом содержащейся в референтных данных (RDA) контекстной и указательной информации (KHI) или, соответственно, контекстной и указательной информации (KHI) и метаинформации (MI), или
e2) вторая рабочая информация (BOI, BOI2) о месте согласовывается с референтной информацией (ROI) о месте, а рабочая информация (BFWI, BGWI) о смене колеи с референтной информацией (RFWI, RGWI) о смене колеи применительно ко второй рабочей информации (BOI, BOI2) о месте и соответствующей ей референтной информации (ROI) о месте на основании сохраненных в памяти референтных данных (RDA) таким образом, что зарегистрированная рабочая информация (BFWI, BGWI) о смене колеи для распознавания колеи, при котором для определенной координаты (BOK, SOK) места железной дороги должна распознаваться предстоящая железнодорожному транспортному средству (BFZ, SFZ) смена (FSW) колеи, в частности смена (GLW) рельсового пути, найдена, когда рабочая информация (BFSWI, BGWI) о смене колеи соответствует содержащейся в референтных данных (RDA) референтной информации (RFWI, RGWI) о смене колеи с учетом содержащейся в референтных данных (RDA) контекстной и указательной информации (KHI) или, соответственно, контекстной и указательной информации (KHI) и метаинформации (MI).
2. Способ по п. 1, отличающийся тем, что
обусловленным сменой (FSW, GLW) колеи образом третья рабочая информация (BOI, BOI3) о месте согласовывается с референтной информацией (ROI) о месте, а рабочая информация (BFSI, BGI) о колее с референтной информацией (RFI, RGI) о колее применительно к третьей рабочей информации (BOI, BOI3) о месте и соответствующей ей референтной информации (ROI) о месте на основании сохраненных в памяти референтных данных (RDA) таким образом, что зарегистрированная рабочая информация (BFI, BGI) о колее для распознавания колеи, при котором для определенной координаты (BOK, SOK) места железной дороги должна распознаваться используемая обусловленным сменой (FSW, GLW) колеи образом железнодорожным транспортным средством (BFZ, SFZ) колея (FSW), в частности используемый рельсовый путь (GLW), найдена, когда рабочая информация (BFI, BGI) о колее соответствует содержащейся в референтных данных (RDA) референтной информации (RFI, RGI) о колее с учетом содержащейся в референтных данных (RDA) контекстной и указательной информации (KHI) или, соответственно, контекстной и указательной информации (KHI) и метаинформации (MI).
3. Способ по п. 1 или 2, отличающийся тем, что
согласование информации для распознавания колей (FS, FSW, GL, GLW) и/или смены (FSW, GLW) колеи выполняется непрерывно.
4. Способ по п. 1 или 2, отличающийся тем, что
согласование информации для распознавания колей (FS, FSW, GL, GLW), в частности в соответствии с признаком e1), выполняется с интервалами распознавания, при этом для констатируемого соответствия рассчитывается степень похожести между дважды зарегистрированной при эксплуатации рабочей информацией (BFI, BGI) о колее применительно к по меньшей мере дважды совместно зарегистрированной при этом рабочей информации (BOI) о месте, или в ходе графической регистрации зарегистрированной при эксплуатации рабочей информацией (BFI, BGI) о колее применительно к по меньшей мере дважды совместно зарегистрированной при этом рабочей информации (BOI) о месте с помощью алгоритмов распознавания кромок ход используемой железнодорожным транспортным средством (BFZ, SFZ) колеи (FS, GL, FSW, GLW) распознается по изменяющейся на зарегистрированном изображении доле изображения колеи (FS, GL, FSW, GLW) по отношению ко всему зарегистрированному изображению и сравнивается с содержащимися в метаинформации (MI), касающимися железнодорожного перегона данными.
5. Способ по одному из пп. 1-4, отличающийся тем, что
для распознавания используемой железнодорожным транспортным средством (BFZ, SFZ) колеи (FS, GL, FSW, GLW) распознавание колеи, которое обусловлено или не обусловлено сменой (FSW, GLW) колеи, выполняется с событийным управлением, при этом аналитически оценивается предоставленная информация (BSTI) о железнодорожном перегоне, которая поступает в виде посылаемых сигналов компонентов железнодорожного перегона, таких как, например, сигналы, активно посылаемые маяками, или сигналы, пассивно посылаемые вследствие сотрясений стрелками (WCH).
6. Способ по одному из пп. 1-4, отличающийся тем, что
распознавание колеи, которое обусловлено сменой (FSW, GLW) колеи, осуществляется таким образом, что зарегистрированная применительно к географическому окружению первая рабочая информация (BOI1) о месте из перспективы железнодорожного транспортного средства (BFZ, SFZ) регистрируется перед сменой (FSW, GLW) колеи спереди, например, с помощью расположенного в моторвагоне (TRW) железнодорожного транспортного средства (BFZ, SFZ), предпочтительно выполненного в виде прибора для записи изображений, например, камеры (BAZG), регистрирующего устройства (EFE), а после смены колеи или, соответственно, смены рельсового пути сзади, например, с помощью размещенного в конце железнодорожного транспортного средства (BFZ, SFZ), предпочтительно выполненного в виде прибора для записи изображений, например, камеры (BAZG), регистрирующего устройства (EFE).
7. Способ по одному из пп. 1-6, отличающийся тем, что
из распознанной используемой колеи (FS, GL), а также с учетом сохраненной информации (BFBTI) о железнодорожном транспортном средстве/железнодорожной технике, в частности информации (SFSTI) о рельсовом транспортном средстве/рельсовой технике, которая касается технического механизма регулирования железнодорожного транспортного средства, в частности технического механизма регулирования рельсового транспортного средства, а также атрибутов и способностей железнодорожного транспортного средства, в частности атрибутов и способностей рельсового транспортного средства, рассчитывается или выводится по меньшей мере одно действие (FAK) ведения.
8. Способ по п. 7, отличающийся тем, что
рассчитанное или выведенное действие (FAK) ведения отображается на устройстве (AZE) отображения машинисту (FZF) транспортного средства на пульте (TFS) машиниста моторвагона железнодорожного транспортного средства (BFZ, SFZ) в качестве рекомендации, применяется в качестве валидации команды ведения или передается Автоматической Системе (AFS) ведения железнодорожного транспортного средства (BFZ, SFZ) для автоматической реализации действия (FAK) ведения.
9. Способ по одному из пп. 1-8, отличающийся тем, что
зарегистрированная для определенной координаты (BOK, SOK) места железной дороги рабочая информация (BOI, BOI1, BOI2, BOI3) о месте для компенсации неточностей при регистрации референтной информации (ROI) о месте и рабочей информации (BOI) о месте для согласования информации изменяется, в частности с помощью технических приемов искажения.
10. Способ по одному из пп. 1-9, отличающийся тем, что:
a) регистрируются рабочая информация (BOI) о месте применительно к географическому окружению и рабочая информация (BFI, BGI) о колее и/или рабочая информация (BFWI, BGWI) о смене колеи применительно к использованию колеи (FS, GL) в зависимости от информации (BSI) о железнодорожном перегоне, в частности информации (SSI) о рельсовом перегоне, для сообщенной в ней координаты (BOK, SOK) места железной дороги или
b) регистрируются рабочая информация (BOI) о месте применительно к географическому окружению и рабочая информация (BFI, BGI) о колее и/или рабочая информация (BFWI, BGWI) о смене колеи применительно к использованию колеи (FS, GL) в зависимости от информации (BSI) о железнодорожном перегоне, в частности информации (SSI) о рельсовом перегоне, для сообщенной в ней координаты (BOK, SOK) места железной дороги и референтная информация (ROI) о месте применительно к географическому окружению и референтная информация (RFI, RGI) о колее и/или референтная информация (BFWI, BGWI) о смене колеи применительно к использованию колеи (FS, GL) в зависимости от информации (BSI, SSI) о железнодорожном перегоне для сообщенного в ней географического положения железнодорожного транспортного средства (BFZ, SFZ).
11. Способ по одному из пп. 1-10, отличающийся тем, что
для оценки географического окружения и сигнального управления железнодорожным сообщением в контексте регистрации учитывается точное положение и/или угол регистрации географического окружения и использования колеи (FS, GL) в железнодорожном сообщении (BVK, SVK) на железнодорожном перегоне (BST, SST) относительно железнодорожного транспортного средства (BFZ, SFZ).
12. Способ по п. 1, отличающийся тем, что
с помощью метаинформации (MI), наряду с информацией, которая в буквальном смысле касается признаков или свойств зарегистрированной информации и информации, полученной в контексте регистрации путем оценки, указывается, как и с помощью каких элементов железнодорожной инфраструктуры, компонентов железнодорожного перегона, в каком месте осуществляется управление железнодорожным сообщением (BVK) или, соответственно, рельсовым сообщением (SVK) в железнодорожной сети (BNE, SNE).
13. Способ по одному из пп. 1-12, отличающийся тем, что
референтные данные (RDA) создаются и сохраняются в памяти статически в специальных поездках или на основании целенаправленной регистрации географического окружения и использования колеи или, соответственно, использования рельсового пути в железнодорожном сообщении (BVK, SVK) персоналом железнодорожного транспортного средства (BFZ, SGZ) на железнодорожном перегоне (BST, SST) в железнодорожной сети (BNE, SNE).
14. Способ по п. 13, отличающийся тем, что
уже сохраненные в памяти по п. 13 референтные данные (RDA) дополняются динамически зарегистрированной рабочей информацией (BOI) о месте и зарегистрированной рабочей информацией (BFI, BGI) о колее и/или рабочей информацией (BFWI, BGWI) о смене колеи и сохраняются в памяти.
15. Способ по одному из пп. 1-14, отличающийся тем, что графическое окружение и использование колеи или, соответственно, использование рельсового пути в железнодорожном сообщении (BVK, SVK) на железнодорожном перегоне (BST, SST) регистрируются графически, например в виде изображений окружающего ландшафта и железнодорожной инфраструктуры, к которым, например, относятся стрелки (WCH), маяки, сигнализирующие и направляющие установки или прочие компоненты железнодорожного перегона и пр.
16. Способ по п. 13 или 14, отличающийся тем, что
статически созданные референтные данные (RDA) или статически созданные референтные данные (RDA) и дополняющие их динамически созданные рабочие данные (BOI, BSZI) согласовываются с соответствующими данными других железнодорожных транспортных средств одной общей представительной выборки железнодорожных транспортных средств и для этого распределяются.
17. Способ по одному из пп. 1-16, отличающийся тем, что
в случае рельсовых транспортных средств создается координата (SOK) места рельсовой дороги, которая указывает положение рельсового транспортного средства (SFZ), при этом:
a) исходя из инициализированного положения рельсового пути, которое указывает положение рельсового транспортного средства (SFZ) на распознанном в последнюю очередь рельсовом пути (GL, GLW), регистрируется количество оборотов колес рельсового транспортного средства на распознанном рельсовом пути (GL, GLW);
b) из численно зарегистрированных оборотов колес рассчитывается значение отрезка пути, пройденного на рельсовом пути (GL, GLW);
c) рассчитанное значение отрезка пути с помощью зарегистрированной на пройденном отрезке пути рельсового пути рабочей информации (BOI) о месте и рабочей информации (BGI) о рельсовом пути и/или зарегистрированной на пройденном отрезке пути рельсового пути рабочей информации (BOI) о месте и рабочей информации (BGWI) о смене рельсового пути корректируется с учетом содержащихся в референтных данных (RDA) для этого отрезка пути контекстной и указательной информации (KHI) или контекстной и указательной информации (KHI) и метаинформации (MI);
d) определяется выделяющаяся зарегистрированная по информации и известная по метаинформации точка отрезка пути одного из компонентов железнодорожного перегона, например, местонахождение стрелки (WCH), маяка, сигнализирующей и направляющей установки и пр.;
e) определяется расстояние от рельсового транспортного средства (SFZ) до известной точки отрезка пути таким образом, что
e1) для выделяющейся точки отрезка пути путем регистрации рабочей информации (BGI) о рельсовом пути и рабочей информации (BOI) о месте или путем регистрации рабочей информации (BGWI) о смене рельсового пути и рабочей информации (BOI) о месте находится ширина рельсов или
e2) для выделяющейся точки отрезка пути на базе сравнения, с одной стороны, зарегистрированной рабочей информации (BOI) о месте и рабочей информации (BGI) о рельсовом пути или зарегистрированной рабочей информации (BOI) о месте и рабочей информации (BGWI) о смене рельсового пути, а также, с другой стороны, соответствующей каждой из них, зарегистрированной референтным образом референтной информации (ROI) о месте и референтной информации (RGI) о рельсовом пути или соответствующей каждой из них, зарегистрированной референтным образом референтной информации (ROI) о месте и референтной информации (RGWI) о смене рельсового пути, размер этого компонента железнодорожного перегона в рабочей информации (BOI, BGI, BGWI) сравнивается с размером этого компонента железнодорожного перегона в референтной информации (ROI, RGI, RGWI), и
f) для выделяющейся точки отрезка пути найденное таким образом положение представляет собой как новое инициализированное положение рельсового пути, так и созданную координату (SOK) места рельсовой дороги.
18. Способ по одному из пп. 1-17, отличающийся тем, что
этим способом осуществляется ассистирование автоматизированному (автономному) или с участием машиниста ведению железнодорожного транспортного средства (BFZ, SFZ) без дополнительной инфраструктуры по некоторому перегону следования.
19. Устройство (FEV, GEV) для распознавания колеи в железнодорожном сообщении (BVK), в частности для распознавания рельсового пути в рельсовом сообщении (SVK), имеющее
a) по меньшей мере одно регистрирующее устройство (EFE, BAZG), с помощью которого могут регистрироваться ходы железнодорожных перегонов (BST), в частности рельсовых перегонов (SST), в железнодорожной сети (BNE), в частности рельсовой сети (SNE), по меньшей мере частично и по существу применительно к географическому окружению и использованию колеи, в частности использованию рельсового пути, обусловленному или не обусловленному сменой колеи, в частности сменой рельсового пути, в железнодорожном сообщении (BVK, SVK) на железнодорожном перегоне (BST, SST), с привязкой к месту в виде референтной информации (ROI) о месте, референтной информации (RFI) о колее, в частности референтной информации (RGI) о рельсовом пути, и референтной информации (RFWI) о смене колеи, в частности называемой референтной информацией о стрелке референтной информации (RGWI) о смене рельсового пути, и которое имеет обрабатывающий компонент (BKO), с помощью которого может оцениваться географическое окружение и использование колеи с или без предшествующей смены колеи железнодорожным сообщением (BVK, SVK) в контексте регистрации, в частности, может снабжаться дополнительными маркировками, при этом
a1) относящиеся к месту референтные данные (RDA), которые дополнительно к зарегистрированной референтной информации (ROI) о месте, относящейся к месту референтной информации (RFI, RGI) о колее, референтной информации (RFWI, RGWI) о смене колеи содержат либо относящуюся к месту, полученную из оценки контекстную и указательную информацию (KHI), либо относящуюся к месту, полученную из оценки контекстную и указательную информацию (KHI), а также относящуюся к контексту регистрации метаинформацию (MI), по меньшей мере частично могут сохраняться либо (опция «A») в соединенном с регистрирующим устройством (EFE, BAZG), включая обрабатывающий компонент (BKO), находящемся внутри устройства запоминающем устройстве (SPE), либо (опция «B») в соединяемом с регистрирующим устройством (EFE, BAZG), включая обрабатывающий компонент (BKO), находящемся вне устройства запоминающем устройстве (SPE),
отличающееся
b) устройством PBE для определения положения, с помощью которого в режиме распознавания колеи, в частности режиме распознавания рельсового пути, для каждого, какого угодно места на железнодорожном перегоне (BST), по которому может двигаться железнодорожное транспортное средство (BFZ), в частности рельсовое транспортное средство (SFZ), может определяться координата (BOK) места железной дороги, в частности координата (SOK) места рельсовой дороги, которой может в достаточной степени указываться положение транспортного средства (BFZ, SFZ);
c) регистрирующим устройством (EFE, BAZG), с помощью которого для каждой определенной координаты (BOK, SOK) места железной дороги могут регистрироваться рабочая информация (BOI) о месте применительно к географическому окружению и рабочая информация (BFI) о колее, в частности рабочая информация (BGI) о рельсовом пути, или рабочая информация (BOI) о месте применительно к географическому окружению и рабочая информация (BFWI) о смене колеи, в частности рабочая информация (BGWI) о смене рельсового пути;
d) устройством (PAE) для согласования положений, которое
d1) согласовывает первую рабочую информацию (BOI, BOI1) о месте с референтной информацией (ROI) о месте, и рабочую информацию (BFI, BGI) о колее с референтной информацией (RFI, RGI) о колее применительно к первой рабочей информации (BOI, BOI1) о месте и соответствующей ей референтной информации (ROI) о месте на основании сохраненных в памяти референтных данных (RDA) таким образом, что зарегистрированная рабочая информация (BFI, BGI) о колее для распознавания колеи, при котором для определенной координаты (BOK, SOK) места железной дороги должна распознаваться используемая железнодорожным транспортным средством (BFZ, SFZ) колея (FS), в частности используемый рельсовый путь (GL), найдена, когда рабочая информация (BFI, BGI) о колее соответствует содержащейся в референтных данных (RDA) референтной информации (RFI, RGI) о колее с учетом содержащейся в референтных данных (RDA) контекстной и указательной информации (KHI) или, соответственно, контекстной и указательной информации (KHI) и метаинформации (MI), или
d2) согласовывает вторую рабочую информацию (BOI, BOI2) о месте с референтной информацией (ROI) о месте и рабочую информацию (BFWI, BGWI) о смене колеи с референтной информацией (RFWI, RGWI) о смене колеи применительно ко второй рабочей информации (BOI, BOI2) и соответствующей ей референтной информации (ROI) о месте на основании сохраненных в памяти референтных данных (RDA) таким образом, что зарегистрированная рабочая информация (BFWI, BGWI) о смене колеи для распознавания колеи, при котором для определенной координаты (BOK, SOK) места железной дороги должна распознаваться предстоящая железнодорожному транспортному средству (BFZ, SFZ) смена (FSW) колеи, в частности смена (GLW) рельсового пути, найдена, когда рабочая информация (BFWI, BGWI) о смене колеи соответствует содержащейся в референтных данных (RDA) референтной информации (RFWI, RGWI) о смене колеи с учетом содержащейся в референтных данных (RDA) контекстной и указательной информации (KHI) или, соответственно, контекстной и указательной информации (KHI) и метаинформации (MI).
20. Устройство (FEV, GEV) по п. 19, отличающееся тем, что
устройство (PAE) для определения положений согласовывает третью рабочую информацию (BOI, BOI3) о месте с референтной информацией (ROI) о месте, а рабочую информацию (BFI, BGI) о колее с референтной информацией (RFI, RGI) о колее применительно к третьей рабочей информации (BOI, BOI3) о месте и соответствующей ей референтной информации (ROI) о месте на основании сохраненных в памяти референтных данных (RDA) таким образом, что зарегистрированная рабочая информация (BFI, BGI) о колее для распознавания колеи, при котором для определенной координаты (BOK, SOK) места железной дороги должна распознаваться используемая обусловленным сменой (FSW, GLW) колеи образом железнодорожным транспортным средством (BFZ, SFZ) колея (FSW), в частности используемый рельсовый путь (GLW), найдена, когда рабочая информация (BFI, BGI) о колее соответствует содержащейся в референтных данных (RDA) референтной информации (RFI, RGI) о колее с учетом содержащейся в референтных данных (RDA) контекстной и указательной информации (KHI) или, соответственно, контекстной и указательной информации (KHI) и метаинформации (MI).
21. Устройство (FEV, GEV) по п. 19 или 20, отличающееся тем, что
a) в распознающем устройстве (EKEKEF) для непрерывного распознавания колей для распознавания используемой железнодорожным транспортным средством (BFZ, SFZ) колеи (FS, GL) содержатся как регистрирующее устройство (EFE, BAZG), так и устройство (PAE) для согласования положений, при этом распознающее устройство (EKEKEF)
a1) соединено с устройством (PBE) для определения положений, чтобы для распознавания колеи (FS, GL) иметь положение железнодорожного транспортного средства (BFZ, SFZ);
a2) выполнено таким образом, что представляющая распознанную колею (FS, GL) первая информация (FSI1) о колее может передаваться вычислительному/анализирующему устройству (BAWE);
b) вычислительное/анализирующее устройство (BAWE) для расчета/аналитической оценки информации соединено с устройством (PBE) для определения положений и запоминающим устройством (SPE);
c) в распознающем устройстве (EKEKEF) для обусловленного сменой колеи распознавания колей для распознавания предстоящей железнодорожному транспортному средству (BFZ, SFZ) смены (FSW, GLW) колеи, и используемой обусловленным сменой (FSW, GLW) колеи образом железнодорожным транспортным средством (BFZ, SFZ) колеи (FSW, GLW) содержатся как регистрирующее устройство (EFE, BAZG), так и устройство (PAE) для согласования положений, при этом распознающее устройство (EKEKEF)
c1) соединено с вычислительным/анализирующим устройством (BAWE), чтобы через соединение «вычислительное/анализирующее устройство (BAWE) и устройство (PBE) для определения положений» иметь положение железнодорожного транспортного средства (BFZ, SFZ) для обусловленного сменой колеи распознавания колей (FSW, GLW);
c2) может управляться с помощью созданной вычислительным/анализирующим устройством (BAWE) триггерной информации (TI) для пуска распознавания смены (FSW, GLW) колеи;
c3) выполнено таким образом, что представляющая распознанную, обусловленную сменой колеи колею (FSW, GLW) информация (FSIW) о колее может передаваться вычислительному/анализирующему устройству (BAWE).
22. Устройство (FEV, GEV) по пп. 19, 20 или 21, отличающееся тем, что
устройство (PAE) для согласования положений выполнено таким образом, что согласование информации для распознавания колей (FS, FSW, GL, GLW) и/или смены (FSW, GLW) колеи выполняется непрерывно.
23. Устройство (FEV, GEV) по пп. 19, 20 или 21, отличающееся тем, что
устройство (PAE) для согласования положений выполнено таким образом, что согласование информации для распознавания колей (FS, FSW, GL, GLW), в частности в соответствии с признаком e1), выполняется с интервалами распознавания, при этом для констатируемого соответствия рассчитывается степень похожести между дважды зарегистрированной при эксплуатации рабочей информацией (BFI, BGI) о колее применительно к по меньшей мере дважды совместно зарегистрированной при этом рабочей информации (BOI) о месте, или в ходе графической регистрации зарегистрированной при эксплуатации рабочей информацией (BFI, BGI) о колее применительно к по меньшей мере дважды совместно зарегистрированной при этом рабочей информации (BOI) о месте с помощью алгоритмов распознавания кромок ход используемой железнодорожным транспортным средством (BFZ, SFZ) колеи (FS, GL, FSW, GLW) распознается по изменяющейся на зарегистрированном изображении доле изображения колеи (FS, GL, FSW, GLW) по отношению ко всему зарегистрированному изображению и сравнивается с содержащимися в метаинформации (MI), касающимися железнодорожного перегона данными.
24. Устройство (FEV, GEV) по одному из пп. 21-23, отличающееся тем, что
распознающее устройство (EKEWEF) для событийно управляемого распознавания колей, которое выполнено таким образом и соединено с устройством (IRE) для регистрации информации, что
a) для распознавания используемой железнодорожным транспортным средством (BFZ, SFZ) колеи (FS, GL, FSW, GLW) распознавание колеи (FS, GL, FSW, GLW), которое обусловлено или не обусловлено сменой (FSW, GLW) колеи, выполняется с событийным управлением, при этом аналитически оценивается предоставленная устройством (IRE) для регистрации информации информация (BSTI) о железнодорожном перегоне, которая поступает в виде посылаемых сигналов компонентов железнодорожного перегона, таких как, например, сигналы, активно посылаемые маяками, или сигналы, пассивно посылаемые вследствие сотрясений стрелками (WCH) и
b) полученная из аналитически оцененной информации (BSTI) о железнодорожном перегоне, представляющая распознанную колею (FS, GL, FSW, GLW) вторая информация (FSI2) о колее может передаваться вычислительному/анализирующему устройству (BAWE).
25. Устройство (FEV, GEV) по одному из пп. 21-24, отличающееся тем, что
распознающее устройство (EKEKEF) для обусловленного сменой колеи распознавания колей/рельсовых путей выполнено таким образом, что распознавание колеи (FSW, GLW), которое обусловлено сменой (FSW, GLW) колеи, осуществляется таким образом, что зарегистрированная применительно к географическому окружению первая рабочая информация (BOI1) о месте из перспективы железнодорожного транспортного средства (BFZ, SFZ) регистрируется перед сменой (FSW, GLW) колеи спереди, например, с помощью расположенного в моторвагоне (TRW) железнодорожного транспортного средства (BFZ, SFZ), предпочтительно выполненного в виде прибора для записи изображений, например камеры (BAZG), регистрирующего устройства (EFE), а после смены (FSW, GLW) колеи сзади, например, с помощью размещенного в конце железнодорожного транспортного средства (BFZ, SFZ), предпочтительно выполненного в виде прибора для записи изображений, например камеры (BAZG), регистрирующего устройства (EFE).
26. Устройство (FEV, GEV) по одному из пп. 21-25, отличающееся тем, что
вычислительное/анализирующее устройство (BAWE) выполнено таким образом и соединено с устройством (STE) управления, которое предпочтительно содержится в устройстве (FEV, GEV), но, напрример, альтернативно также имплементировано или размещено вне устройства (FEV, GEV), например, на пульте (TFS) машиниста моторвагона железнодорожного транспортного средства (BFZ, SFZ), что генерированная из информации (FSI1, FSIW, FSI2) о колее управляющая информация (STI) передается устройству (STE) управления, так что это устройство из распознанной используемой колеи (FS, FSW, GL, GLW), а также с учетом сохраненной в банке (DAB) данных информации (BFBTI) о железнодорожном транспортном средстве/железнодорожной технике, в частности информации (SFSTI) о рельсовом транспортном средстве/рельсовой технике, которая касается технического механизма регулирования железнодорожного транспортного средства, в частности технического механизма регулирования рельсового транспортного средства, а также атрибутов и способностей железнодорожного транспортного средства, в частности атрибутов и способностей рельсового транспортного средства, рассчитывает и выводит по меньшей мере одно действие FAK ведения, которое отображается на устройстве (AZE) отображения машинисту (FZF) транспортного средства на пульте (TFS) машиниста моторвагона железнодорожного транспортного средства (BFZ, SFZ) в качестве рекомендации, применяется в качестве валидации команды ведения или передается Автоматической Системе (AFS) ведения железнодорожного транспортного средства (BFZ, SFZ) для автоматической реализации действия (FAK) ведения.
27. Устройство (FEV, GEV) по одному из пп. 19-26, отличающееся тем, что
устройство (PAUE) для компенсации положений, которое для распознавания колеи (FS, GL) включено перед устройством (PAE) для согласования положений, и которое изменяет зарегистрированную для определенной координаты (BOK, SOK) места железной дороги рабочую информацию (BOI, BOI1, BOI2, BOI3) о месте для компенсации неточностей при регистрации референтной информации (ROI) о месте и рабочей информации (BOI) о месте для согласования информации изменяется, в частности с помощью технических приемов искажения.
28. Устройство (FEV, GEV) по одному из пп. 19-27, отличающееся тем, что
регистрирующее устройство (EFE, BAZG) имеет управляющий интерфейс (STSS), через который регистрирующее устройство (EFE, BAZG) получает от устройства (PBE) для определения положения информацию (BSI) о железнодорожном перегоне, в частности информацию (SSI) о рельсовом перегоне, и с помощью которого регистрирующее устройство (EFE, BAZG) может управляться таким образом, что оно
a) регистрирует рабочую информацию (BOI) о месте применительно к географическому окружению и рабочую информацию (BFI, BGI) о колее и/или рабочую информацию (BFWI, BGWI) о смене колеи применительно к использованию колеи (FS, GL) в зависимости от информации (BSI) о железнодорожном перегоне для сообщенной в ней координаты (BOK, SOK) места железной дороги или
b) регистрирует рабочую информацию (BOI) о месте применительно к географическому окружению и рабочую информацию (BFI, BGI) о колее и/или рабочую информацию (BFWI, BGWI) о смене колеи применительно к использованию колеи (FS, GL) в зависимости от информации (BSI) о железнодорожном перегоне для сообщенной в ней координаты (BOK, SOK) места железной дороги и референтную информацию (ROI) о месте применительно к географическому окружению и референтную информацию (RFI, RGI) о колее и/или референтную информацию (BFWI, BGWI) о смене колеи применительно к использованию колеи (FS, GL) в зависимости от информации (BSI, SSI) о железнодорожном перегоне для сообщенного в ней географического положения железнодорожного транспортного средства (BFZ, SFZ).
29. Устройство (FEV, GEV) по одному из пп. 19-28, отличающееся тем, что
регистрирующее устройство (EFE, BAZG) выполнено таким образом, что для оценки для оценки географического окружения и сигнального управления железнодорожным сообщением в контексте регистрации учитывается точное положение и/или угол регистрации географического окружения и использования колеи (FS, GL) в железнодорожном сообщении (BVK, SVK) на железнодорожном перегоне (BST, SST) относительно железнодорожного транспортного средства (BFZ, SFZ).
30. Устройство (FEV, GEV) по п. 19, отличающееся тем, что
метаинформация (MI), наряду с информацией, которая в буквальном смысле касается признаков или свойств зарегистрированной информации и информации, полученной в контексте регистрации путем оценки, указывает, как и с помощью каких элементов железнодорожной инфраструктуры, компонентов железнодорожного перегона, в каком месте осуществляется управление железнодорожным сообщением (BVK) или, соответственно, рельсовым сообщением (SVK) в железнодорожной сети (BNE, SNE).
31. Устройство (FEV, GEV) по одному из пп. 19-30, отличающееся тем, что
регистрирующее устройство (EFE, BAZG) выполнено таким образом, что референтные данные (RDA) создаются и сохраняются в памяти статически в специальных поездках или на основании целенаправленной регистрации географического окружения и использования колеи или, соответственно, использования рельсового пути в железнодорожном сообщении (BVK, SVK) персоналом железнодорожного транспортного средства (BFZ, SGZ) на железнодорожном перегоне (BST, SST) в железнодорожной сети (BNE, SNE).
32. Устройство (FEV, GEV) по п. 31, отличающееся тем, что
регистрирующее устройство (EFE, BAZG) выполнено таким образом, что уже сохраненные в памяти по п. 13 референтные данные (RDA) дополняются динамически зарегистрированной рабочей информацией (BOI) о месте и зарегистрированной рабочей информацией (BFI, BGI) о колее и/или рабочей информацией (BFWI, BGWI) о смене колеи и сохраняются в памяти.
33. Устройство (FEV, GEV) по одному из пп. 19-32, отличающееся тем, что
регистрирующее устройство (EFE, BAZG) выполнено в виде прибора (BAZG) для записи изображений, в частности в виде обычной видеокамеры, лазерного сенсора, сенсора для беспроводной локации и измерения расстояния, называемого также РАДАРОМ, и/или тепловой камеры для съемки изображений, который графически регистрирует географическое окружение и использование колеи (FS, GL) в железнодорожном сообщении (BVK, SVK) на железнодорожном перегоне (BST, SST), например, в виде изображений окружающего ландшафта и железнодорожной инфраструктуры, к которым, например, относятся стрелки (WCH), маяки, сигнализирующие и направляющие установки или прочие компоненты железнодорожного перегона и пр.
34. Устройство (FEV, GEV) по п. 33, отличающееся тем, что
прибор (BAZG) для записи изображений выполнен с возможностью поворота.
35. Устройство (FEV, GEV) по одному из пп. 19-34, отличающееся тем, что
для устройства (FEV, GEV) предназначены два регистрирующих устройство (EFE, BAZG), при этом одно расположено в моторвагоне (TRW) железнодорожного транспортного средства (BFZ, SFZ), а другое в конце железнодорожного транспортного средства (BFZ, SFZ).
36. Устройство (FEV, GEV) по одному из пп. 33-35, отличающееся тем, что
прибор (BAZG) для записи изображений имеет корректирующий компонент (KOK), который приобщает к аналитической оценке графического материала данные о погоде и освещенности.
37. Устройство (FEV, GEV) по одному из пп. 33-36, отличающееся тем, что
прибор (BAZG) для записи изображений имеет компонент (BVK) изменения фокусного расстояния, который, в зависимости от расстояния до колеи (FS, FSW, GL, GLW) или до смены (FSW, GLW) колеи, выбирает правильный угол съемки, чтобы таким образом оптимально поддерживать многократную аналитическую оценку.
38. Устройство (FEV, GEV) по одному из пп. 33-37, отличающееся тем, что
прибор (BAZG) для записи изображений имеет компонент (BLK) освещения, в частности прожектор, который работает в пределах или вне видимой человеку области.
39. Устройство (FEV, GEV) по п. 31 или 32, отличающееся тем, что
оно соединено с внешней станцией (AWS) аналитической оценки и образует с внешней станцией (AWS) аналитической оценки функциональный блок таким образом, что статически созданные референтные данные (RDA) или статически созданные референтные данные (RDA) и дополняющие их динамически созданные рабочие данные (BOI, BFI, BGI, BFWI, BGWI) согласовываются с соответствующими данными других железнодорожных транспортных средств одной общей представительной выборки железнодорожных транспортных средств и для этого распределяются.
40. Устройство (FEV, GEV) по одному из пп. 21-39, отличающееся тем, что
в случае рельсовых транспортных средств может создаваться координата (SOK) места рельсовой дороги, которая указывает положение рельсового транспортного средства (SFZ), при этом функциональный блок, который образован из (i) соединенного с вычислительным/анализирующим устройством (BAWE) и устройством (PBE) для определения положений инициализирующего устройства (ISE), (ii) соединенного с вычислительным/анализирующим устройством (BAWE) устройства (RUZE) для подсчета оборотов колес, (iii) вычислительного/анализирующего устройства (BAWE), (iv) устройства (PBE) для определения положений и (v) распознающего устройства (EKEKEF) для непрерывного распознавания колей/рельсовых путей или распознающего устройства (EKEKEF) для обусловленного сменой колеи распознавания колей, выполнен таким образом, что
a) исходя из инициализированного, сохраненного в инициализирующем устройстве (ISE) положения рельсового пути, которое указывает положение рельсового транспортного средства (SFZ) на распознанном в последнюю очередь распознающим устройством (EKEKEF) для непрерывного распознавания колей или распознающим устройством (EKEKEF) для обусловленного сменой колеи распознавания колей и аналитически оцененном вычислительным/анализирующим устройством (BAWE) рельсовом пути (GL, GLW), в устройстве (RUZE) для подсчета оборотов колес регистрируется количество оборотов колес рельсового транспортного средства на распознанном рельсовом пути (GL, GLW);
b) из численно зарегистрированных оборотов колес в вычислительном/анализирующем устройстве (BAWE) рассчитывается значение отрезка пути, пройденного на рельсовом пути (GL, GLW);
c) в вычислительном/анализирующем устройстве (BAWE) рассчитанное значение отрезка пути распознающим устройством (EKEKEF) для непрерывного распознавания колей или распознающим устройством (EKEKEF) для обусловленного сменой колеи распознавания колей/рельсовых путей, зарегистрированная на пройденном отрезке пути рельсового пути рабочая информация (BOI) о месте и рабочая информация (BGI) о рельсовом пути и/или зарегистрированная на пройденном отрезке пути рельсового пути рабочая информация (BOI) о месте и рабочая информация (BGWI) о смене рельсового пути корректируется с учетом содержащихся в референтных данных (RDA) для этого отрезка пути контекстной и указательной информации (KHI) или контекстной и указательной информации KHI и метаинформации (MI);
d) в вычислительном/анализирующем устройстве (BAWE) определяется выделяющаяся, зарегистрированная по информации (BOI, BGI, BGWI) и известная по метаинформации (MI) точка отрезка пути одного из компонентов железнодорожного перегона, например, местонахождение стрелки (WCH), маяка, сигнализирующей и направляющей установки и пр.;
e) в вычислительном/анализирующем устройстве (BAWE) определяется расстояние от рельсового транспортного средства (SFZ) до известной точки отрезка пути таким образом, что
e1) для выделяющейся точки отрезка пути путем регистрации рабочей информации (BGI) о рельсовом пути и рабочей информации (BOI) о месте или путем регистрации рабочей информации (BGWI) о смене рельсового пути и рабочей информации (BOI) о месте находится ширина рельсов или
e2) для выделяющейся точки отрезка пути на базе сравнения, с одной стороны, зарегистрированной рабочей информации (BOI) о месте и рабочей информации (BGI) о рельсовом пути или зарегистрированной рабочей информации (BOI) о месте и рабочей информации (BGWI) о смене рельсового пути, а также, с другой стороны, соответствующей каждой из них, зарегистрированной референтным образом референтной информации (ROI) о месте и референтной информации (RGI) о рельсовом пути или соответствующей каждой из них, зарегистрированной референтным образом референтной информации (ROI) о месте и референтной информации (RGWI) о смене рельсового пути, размер этого компонента железнодорожного перегона в рабочей информации (BOI, BGI, BGWI) сравнивается с размером этого компонента железнодорожного перегона в референтной информации (ROI, RGI, RGWI), и
f) для выделяющейся точки отрезка пути найденное таким образом положение представляет собой как новое инициализированное положение рельсового пути, так и созданную координату (SOK) места рельсовой дороги, которая сохраняется/которые сохраняются или, соответственно, может /могут сохраняться в памяти в инициализирующем устройстве (ISE) и вводятся/вводится или, соответственно, может/могут вводиться в устройство (PBE) для определения положений.
41. Устройство (FEV, GEV) по одному из пп. 19-40, отличающееся
виртуальной машиной, которая выполнена и функционирует как «Software Defined Signal Recognition of Rail Traffic Systems» (англ. программно-определяемое распознавание сигналов систем железнодорожного транспорта).
42. Устройство (FEV, GEV) по одному из пп. 19-41, отличающееся тем, что
с помощью устройства (FEV, GEV) возможно ассистирование автоматизированному (автономному) или с участием машиниста ведению железнодорожного транспортного средства (BFZ, SFZ) без дополнительной инфраструктуры по некоторому перегону следования.
43. Железнодорожное транспортное средство (BFZ) для распознавания колеи в железнодорожном сообщении (BVK), в частности рельсовое транспортное средство (SFZ) для распознавания рельсового пути в рельсовом сообщении (SVK), отличающееся тем, что
устройство (FEV, GEV) по одному из пп. 19-42 интегрировано в железнодорожное транспортное средство (BFZ, SFZ).
| DE 102014220778 A1, 14.04.2016 | |||
| DE 19835944 A1, 17.02.2000 | |||
| EP 2993105 A2, 09.03.2016 | |||
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЛОКОМОТИВОМ | 2004 |
|
RU2374113C2 |

