Изобретение относится к транспортному машиностроению, преимущественно к автоматическому управлению процессом торможения рельсового транспортного средства, и может быть использовано в автоматических противоюзных устройствах.
В настоящее время известен ряд способов предотвращения юза тормозящего колеса (колесной пары), которые основаны на регулировании давления рабочей среды в тормозном цилиндре колесного тормоза в зависимости от сил сцепления колеса с рельсом или дорожным полотном, обуславливающих скольжение колеса. Указанные способы по принципу регулирования давления с целью уменьшения скольжения колеса можно разделить на две группы.
К одной группе относятся способы, в которых при возникновении юза у тормозящего колеса давление рабочей среды в соответствующем тормозном цилиндре колесного тормоза уменьшают до тех пор, пока скольжение контролируемого колеса станет равным нулю. Такой способ, например, реализуется с помощью устройства, описанного в ПМ РФ №2555. Рассматриваемые способы регулирования давления, вследствие инерции колеса (колесной пары), характеризуются недостаточной точностью, низким быстродействием, большим расходом рабочей среды, удлинением тормозного пути.
Следует отметить еще один недостаток, присущий способу, реализуемому с помощью устройства, описанного в ПМ РФ №2555. За скорость транспортного средства, относительно которой определяют скольжение попавшей в юз колесной пары, принимают скорость той колесной пары, которая в предыдущем цикле измерения находилась в наилучших условиях по отношению к юзу и имела наибольшую скорость. Это приводит к тому, что, в случае, когда все оси попадают в юз (а такие ситуации часто возникают на практике), возникает неопределенность в отношении того, какую скорость следует принимать за скорость транспортного средства, в результате чего снижается точность рассматриваемого способа.
К другой группе относятся способы предотвращения юза тормозящего колеса, в которых давление рабочей среды в соответствующем тормозном цилиндре колесного тормоза регулируют таким образом, чтобы скольжение колеса в процессе торможения сохранялось в некоторых заданных пределах. Указанные способы с точки зрения характеристик регулирования являются более перспективными. Для повышения чувствительности к изменению сил сцепления в качестве критериев регулирования предпочтительно выбирать не только величину скольжения колеса, но также иные характеристики движения колеса, позволяющие оценить развитие его скольжения, в частности, величину и(или) знак ускорения колеса.
Так, например, известен способ предотвращения юза тормозящего колеса [SU 1772022], в котором в процессе регулирования давления сохраняется заданный уровень скольжения. Данный способ выбран авторами за прототип.
В указанном способе измеряют угловую скорость колеса, определяют величину скольжения колеса, задают пороговое значение скольжения, сравнивают величину скольжения колеса с пороговым значением, контролируют знак ускорения колеса, осуществляют ступенчатое регулирование давления рабочей среды в тормозном цилиндре колесного тормоза в зависимости от результатов сравнения величины скольжения колеса с пороговым значением и результатов контроля знака ускорения колеса, причем указанное давление в цикле регулирования или повышают, или удерживают на постоянном уровне, или уменьшают.
Согласно рассматриваемому способу в процессе торможения транспортного средства повышают давление в тормозном цилиндре контролируемого колеса до тех пор, пока скольжение колеса не превысит допустимую пороговую величину. Затем понижают давление до тех пор, пока контролируемое колесо не перейдет к ускорению его вращения. После этого удерживают давление на достигнутом уровне до тех пор, пока скольжение не станет меньше допустимого значения. Повышают давление до уровня, на установленную величину меньшего, чем максимальный уровень давления в предыдущем цикле. Удерживают давление на достигнутом уровне на протяжении установленного отрезка тормозного пути. После этого вновь повышают давление до превышения допустимого скольжения и т.д. При этом в указанном режиме управляют торможением одного колеса (одной колесной оси) транспортного средства, которое выбирается в качестве задающего, а другие колеса тормозят аналогично, но верхний уровень давления в них ограничивают величиной меньшей, чем величина давления в предыдущем цикле для задающего колеса. В качестве задающей колеса (оси) могут быть использованы, в частности, по очереди все колеса (оси) транспортного средства или может быть использовано колесо (ось), находящееся в наихудших условиях по скольжению.
Рассматриваемый способ обеспечивает ступенчатое изменение давления в соответствующем тормозном цилиндре колесного тормоза в зависимости от двух критериев - скольжения колеса и его ускорения, при этом скольжение колеса в процессе регулирования удерживается вблизи порогового значения. Указанный способ регулирования давления обеспечивает достаточное быстродействие и способствует экономному расходу рабочей среды. Однако он обладает рядом недостатков.
В данном способе регулируют давление в тормозных цилиндрах колесных тормозов всех колес по результатам контроля скольжения и ускорения задающего колеса, то есть способ не предусматривает индивидуального управления процессом торможения для каждого из колес. В каждом цикле регулирования отрезок времени, в течение которого удерживают давление на постоянном уровне, определяется не параметрами, характеризующими скольжение задающего колеса, а временем прохождения транспортным средством установленного отрезка тормозного пути. Указанные факторы снижают точность и эффективность противоюзовой защиты. Кроме того, необходимость установки и поддержания заданного уровня давления в тормозном цилиндре колесного тормоза требует использования точных датчиков давления и регуляторов давления, что усложняет реализацию способа и увеличивает стоимость его аппаратурного оформления.
Задачей изобретения является повышение быстродействия и точности способа предотвращения юза тормозящего колеса.
Сущность способа заключается в том, что измеряют угловую скорость колеса, определяют величину скольжения колеса относительно скорости транспортного средства, задают пороговое значение скольжения колеса, сравнивают величину скольжения колеса с пороговым значением, определяют знак ускорения колеса, на основании результатов сравнения величины скольжения колеса и с учетом знака ускорения колеса вырабатывают управляющие сигналы, по которым осуществляют ступенчатое регулирование давления в тормозном цилиндре, в зависимости от вырабатываемых сигналов давление в цикле регулирования или повышают, или удерживают на постоянном уровне, или уменьшают. При этом согласно изобретению определяют величину ускорения колеса, определяют знак и величину производной ускорения колеса, задают первое, второе и третье пороговые значения скольжения колеса ПОР DV1, ПОР DV2, ПОР DV3, связанные между собой соотношением ПОР DV1<ПOP DV2<ПОР DV3, причем первое пороговое значение ПОР DV1 определяет наименьшую величину скольжения колеса, а третье пороговое значение ПОР DV3 определяет ее наибольшую величину, задают первое, второе и третье пороговые значения отрицательного ускорения колеса ПОР А1, ПОР А2, ПОР A3, связанные между собой соотношением ПОР А1<ПОР А2 <ПОР A3, причем первое пороговое значение ПОР А1 определяет наименьшую величину отрицательного ускорения колеса, а третье пороговое значение ПОР A3 определяет его наибольшую величину, задают пороговое значение положительного ускорения колеса ПОР А4, задают пороговое значение положительной производной ускорения колеса ПОР DA1, сравнивают величины скольжения колеса, отрицательного и положительного ускорения колеса и положительной производной ускорения колеса с их пороговыми значениями. Управляющие сигналы, по которым осуществляют ступенчатое регулирование давления в тормозном цилиндре, вырабатывают на основании результатов сравнения скольжения колеса, отрицательного и положительного ускорения колеса, положительной производной ускорения колеса с их пороговыми значениями. При этом увеличивают давление до тех пор, пока величина скольжения колеса не достигнет второго порогового значения ПОР DV2 или величина отрицательного ускорения колеса не достигнет второго порогового значения ПОР А2, удерживают давление на постоянном уровне до тех пор, пока величина скольжения колеса не достигнет третьего порогового значения ПОР DV3 или величина отрицательного ускорения колеса не достигнет третьего порогового значения ПОР A3, уменьшают давление до тех пор, пока величина скольжения колеса не достигнет второго порогового значения ПОР DV2 и величина отрицательного ускорения колеса не достигнет второго порогового значения ПОР А2, или, если ускорение колеса станет положительным, пока его величина не достигнет порогового значения ПОР А4, или, если производная ускорения колеса станет положительной, пока ее величина не достигнет порогового значения ПОР DA1, удерживают давление на постоянном уровне до тех пор, пока величина скольжения колеса не достигнет первого порогового значения ПОР DV1 и величина отрицательного ускорения колеса не достигнет первого порогового значения ПОР А1, увеличивают давление и далее цикл изменения давления повторяют.
Кроме того, сущность способа заключается в том, что скорость транспортного средства определяют с использованием условного ускорения транспортного средства, за которое принимают наименьшее из значений условных ускорений его колес. Причем для каждого колеса его условное ускорение представляет собой изменение скорости колеса относительно скорости транспортного средства на предыдущем шаге измерения, отнесенное к интервалу измерения. При этом величину условного ускорения транспортного средства ограничивают максимально допустимой для данного вида транспортного средства величиной ускорения.
Предлагаемый способ предусматривает индивидуальное для каждого колеса (колесной пары) ступенчатое регулирование давления в соответствующем тормозном цилиндре, позволяющее избежать негативных последствий, обусловленных инерцией движения тормозящего колеса. Это достигается за счет ряда принципиальных особенностей способа.
Регулирование давления в соответствующем тормозном цилиндре колесного тормоза согласно предлагаемому способу осуществляется по следующим критериям: по величине скольжения колеса, по знаку и величине ускорения колеса, по знаку и величине производной ускорения колеса. Контроль ускорения колеса и производной ускорения колеса позволяет принимать управляющие решения с учетом динамики изменения величины скольжения колеса. За счет регулирования по указанным критериям достигается высокое быстродействие и точность предлагаемого способа, а также оптимизация процесса управления давлением с точки зрения расхода рабочей среды и снижения тормозного пути. При этом для реализации способа не требуется наличия дорогостоящих датчиков и регуляторов давления.
В соответствии с заявляемым способом в процессе торможения величину скольжения колеса и/или величину отрицательного ускорения (замедления) колеса удерживают в заданных пределах, причем команды, управляющие изменением давления в тормозном цилиндре, вырабатываются как при достижении указанными величинами их наименьших и наибольших предельных значений, так и при достижении их промежуточных пороговых значений, лежащих внутри диапазонов допустимых значений данных величин. Такой процесс ступенчатого изменения давления обеспечивает соответствие между реализуемым и оптимальным скольжением контролируемого колеса.
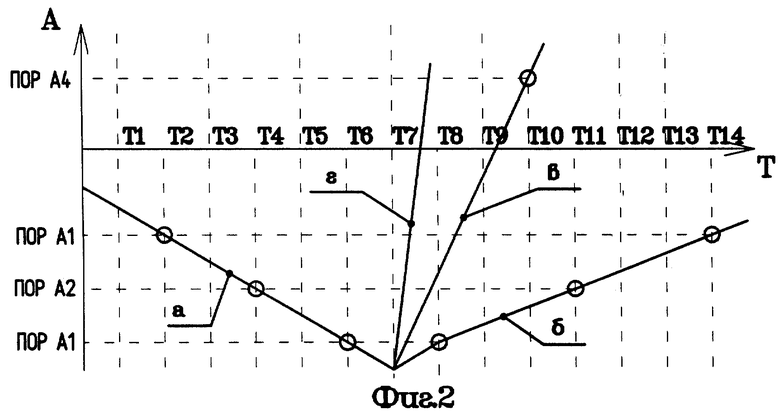
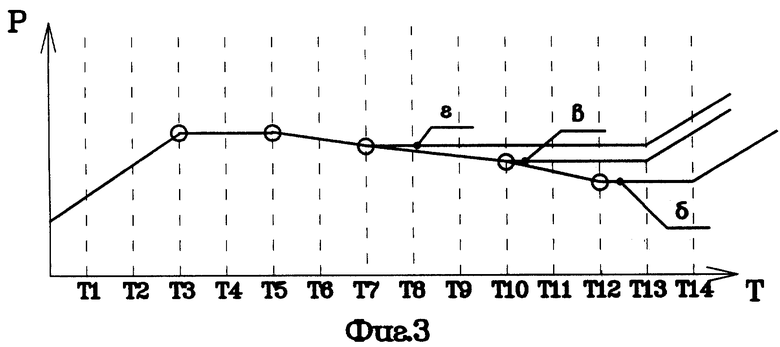
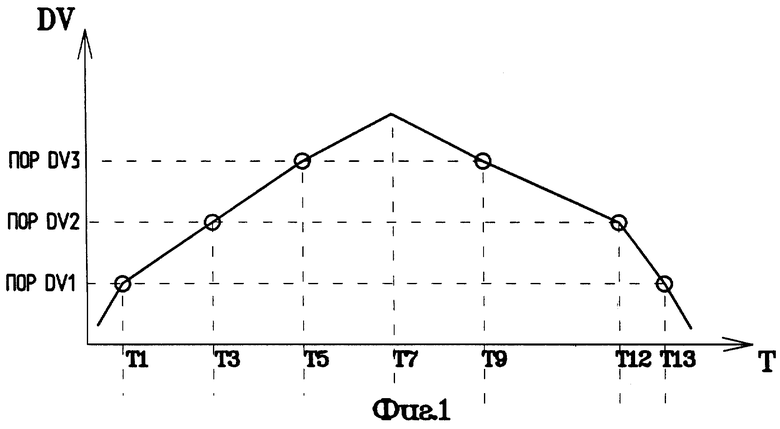
На фиг.1 представлен вид кривой изменения во времени величины скольжения колеса; на фиг.2 представлены возможные виды кривой изменения во времени ускорения колеса; на фиг.3 представлены возможные виды кривой изменения во времени давления рабочей среды в тормозном цилиндре колесного тормоза
Способ реализуют следующим образом.
Измеряют, в частности, с помощью датчиков на основе эффекта Холла, скорость вращения колеса (колесной пары).
На основании результатов измерения определяют линейную скорость колеса Vк и его ускорение Ак по следующей зависимости:
Ак=(Vк-Vк пред)/t,
где Vк пред - скорость колеса на предыдущем шаге измерения; t - интервал измерения.
Определяют величину производной ускорения колеса DАк по известной зависимости:
DAк=(Ак-Ак пред)/t,
где Ак пред - ускорение колеса на предыдущем шаге измерения.
Определяют скорость транспортного средства Vтс с использованием условного ускорения транспортного средства Аусл тс по следующей зависимости:
Vтc=Vтс пред + Аусл тс•t,
где Vтс пред - скорость транспортного средства на предыдущем шаге измерения; t - интервал измерения.
При этом за ускорение Аусл тc принимают наименьшее из значений условных ускорений колес Аусл кi, то есть
Аусл тс=min{Аусл кi}.
Для каждого колеса его условное ускорение Аусл кi представляет собой изменение скорости колеса Vкi относительно скорости транспортного средства на предыдущем шаге измерения Vтс пред, отнесенное к интервалу измерения t:
Аусл кi=(Vкi-Vтс пред)/t.
При этом условное ускорение транспортного средства Аусл тс ограничено максимально допустимой для данного вида транспортного средства величиной ускорения. То есть в случае, когда на каком-либо шаге измерения определенное вышеописанным образом условное ускорение транспортного средства Аусл тс превышает максимально допустимое для данного вида транспортного средства ускорение, за Аусл тс на данном шаге измерения принимают указанное максимально допустимое ускорение.
Выбранная идеология определения скорости транспортного средства, когда за указанную скорость принимается не скорость какого-либо из колес (колесных пар), а вычисляют ее на основании описанного выше алгоритма вычисления условного ускорения транспортного средства, позволяет избежать неопределенности при вычислении скорости транспортного средства и, соответственно, величины скольжения колеса даже в случаях, когда все колеса одновременно попадают в юз.
Определяют относительное скольжение колеса DVк по следующей зависимости:
DVк=(Vтс-Vк)/V тс.
Сравнивают вычисленные значения скольжения колеса с тремя его заданными пороговыми значениями ПОР DV1, ПОР DV2, ПОР ВV3, которые соотносятся следующим образом: ПОР DV1<ПOP DV2<ПOP DV3.
Определяют знак ускорения колеса и, если оно отрицательное, сравнивают величину ускорения колеса с тремя пороговыми значениями ПОР А1, ПОР А2, ПОР A3, которые соотносятся следующим образом: ПОР А1<ПОР А2<ПОР А3. Если ускорение положительное, то сравнивают его величину с пороговым значением для положительного ускорения ПОР А4, которое может по абсолютной величине отличаться от пороговых значений для отрицательного ускорения и, в принципе может быть равным нулю.
Определяют знак производной ускорения колеса, и, если производная положительная, сравнивают ее значение с пороговым значением ПОР DA1.
На основании результатов сравнения указанных величин с соответствующими пороговыми значениями и с учетом знака ускорения и производной ускорения регулируют величину давления в тормозном цилиндре колесного тормоза (в частности, с помощью впускного и сбрасывающего клапанов).
В процессе торможения транспортного средства повышают давление в тормозных цилиндрах колесных тормозов. Если при этом колесо попадает в область повышенного скольжения, то его скорость Vк уменьшается быстрее, чем скорость транспортного средства Vтс.
Увеличение давления в тормозном цилиндре колеса производят до тех пор, пока величина скольжения колеса не достигнет второго порогового значения ПОР DV2, лежащего внутри заданного диапазона изменения величины скольжения, или пока отрицательное ускорение колеса не достигнет второго порогового значения ПОР А2, лежащего внутри заданного диапазона изменения величины отрицательного ускорения колеса. По достижении какой-либо из указанных величин ее второго порогового значения ПОР DV2 или ПОР А2, прекращают увеличивать давление в тормозном цилиндре, после чего удерживают давление постоянным на достигнутом уровне.
При этом, если в процессе удерживания давления постоянным происходит уменьшение юза колеса, то величины его скольжения и отрицательного ускорения уменьшаются. Когда указанные величины уменьшатся до их наименьших пороговых значений ПОР DV1 и ПОР А1, давление в тормозном цилиндре начинают увеличивать. Увеличение давления производят до тех пор, пока какая-либо из указанных величин вновь не достигнет второго порогового значения ПОР DV2 или ПОР А2.
Если же в процессе удерживания давления постоянным происходит дальнейшее развитие юза колеса, то величины его скольжения и отрицательного ускорения возрастают. По достижении какой-либо из указанных величин наибольшего порогового значения ПОР DV3 или ПОР A3, давление в тормозном цилиндре начинают уменьшать. В процессе уменьшения давления колесо растормаживается, и величины его скольжения и отрицательного ускорения уменьшаются. Давление в тормозном цилиндре уменьшают до тех пор, пока величины скольжения и отрицательного ускорения колеса не уменьшатся до их вторых пороговых значений ПОР DV2 и ПОР А2. После этого удерживают давление на достигнутом уровне постоянным до тех пор, пока величины скольжения и отрицательного ускорения колеса не достигнут наименьших пороговых значений ПОР DV1 и ПОР А1. Затем увеличивают давление (до тех пор, пока величина скольжения колеса или величина отрицательного ускорения колеса не достигнет второго порогового значения ПОР DV2 или ПОР А2) и далее цикл изменения давления в тормозном цилиндре повторяют.
Если в процессе торможения колеса при уменьшении давления в тормозном цилиндре оно начнет не замедляться, а ускоряться, и ускорение колеса станет положительными, а его величина превысит пороговое значение ПОР А4, или производная ускорения колеса станет положительной, а ее величина превысит пороговое ПОР DA1 (что свидетельствует об устойчивой тенденции колеса к его ускоренному движению), то прекращают уменьшать давление в тормозном цилиндре. Удерживают давление на достигнутом уровне постоянным до тех пор, пока величины скольжения и отрицательного ускорения колеса не достигнут наименьших предельных значений ПОР DV1 и ПОР А1. Затем увеличивают давление (до тех пор, пока величина скольжения колеса или величина отрицательного ускорения колеса не достигнет второго порогового значения ПОР DV2 или ПОР А2) и далее цикл изменения давления в тормозном цилиндре повторяют.
Приведенные на фиг.1-3 кривые иллюстрируют реализацию предлагаемого способа.
В моменты времени Т1, Т3 и Т5 (см. фиг.1) величина скольжения колеса достигает соответственно первого, второго и третьего порогового значения ПОР DV1, ПОР DV2 и ПОР DV3 в процессе развития скольжения. В моменты времени Т9, Т12 и Т13 (см. фиг.1) величина скольжения колеса достигает соответственно третьего, второго и первого порогового значения ПОР DV3, ПОР DV2 и ПОР DV1 в процессе уменьшения скольжения.
В моменты времени Т2, Т4 и Т6 (см. фиг.2, участок "а") величина отрицательного ускорения колеса достигает соответственно первого, второго и третьего порогового значения ПОР А1, ПОР А2 и ПОР A3 в процессе развития скольжения. Дальнейшее изменение ускорения колеса иллюстрируется участками кривой "б", "в", и "г" на фиг.2. Данные участки кривой изменения ускорения колеса отличаются величиной положительной производной ускорения колеса. Причем на участке "г" указанная производная имеет большее, чем на прочих участках, значение, по величине, равное пороговому значению ПОР DA1. Если изменение ускорения колеса происходит в соответствии с участком "б" на фиг.2, то в процессе уменьшения скольжения в моменты времени Т8, Т11 и Т14 величина отрицательного ускорения колеса достигает соответственно третьего, второго и первого порогового значения ПОР A3, ПОР А2 и ПОР А1. Если изменение ускорения происходит в соответствии с участком "в" на фиг.2, то в процессе уменьшения скольжения в момент времени Т10 положительное ускорение колеса достигает порогового значения ПОР А4. Если изменение ускорения происходит в соответствии с участком "г" на фиг.2, то в момент времени Т7 положительная производная ускорения колеса достигает порогового значения ПОР DA1.
В процессе торможения колеса осуществляют изменение давления в тормозном цилиндре следующим образом (см. фиг.3).
На отрезке времени 0-Т3 давление увеличивают до тех пор, пока в момент времени Т3 величина скольжения колеса не достигнет второго порогового значения ПОР DV2. Затем на отрезке времени Т3-Т5 удерживают давление постоянным на достигнутом уровне до тех пор, пока величина скольжения колеса в момент времени Т5 не достигнет третьего порогового значения ПОР DV3. Начиная с момента времени Т5 уменьшают давление.
При этом, если изменение ускорения колеса соответствует участку "б" на фиг.2, давление снижают (см. участок "б" на фиг.3) до момента времени Т12, когда величина скольжения колеса достигнет второго порогового значения ПОР DV2 (при этом отрицательное ускорение колеса ниже второго порогового значения ПОР А2). Если изменение ускорения колеса соответствует участку "в" на фиг.2, давление снижают (см. участок "в" на фиг.3) до момента времени Т10, когда величина положительного ускорения колеса достигнет порогового значения ПОР А4. Если изменение ускорения колеса соответствует участку "г" на фиг.2, давление снижают (см. участок "г" на фиг.3) до момента времени Т7, когда величина положительной производной ускорения колеса достигнет порогового значения ПОР DA1. Начиная с момента времени Т12, или Т10, или Т7 (соответственно участок " б", или участок "в", или участок "г" на фиг.3) удерживают давление постоянным на достигнутом уровне до момента времени Т14, когда пока величина отрицательного ускорения колеса достигнет наименьшего предельного значения ПОР А1 (при этом величина скольжения колеса уже достигла наименьшего предельного значения ПОР DV1). Затем давление увеличивают, после чего цикл изменения давления повторяют (на фиг.3 не показано).
Изобретение относится к транспортному машиностроению, преимущественно к автоматическому управлению процессом торможения рельсового транспортного средства, и может быть использовано в автоматических противоюзных устройствах. Способ предотвращения юза тормозящего колеса заключается в том. что определяют величину ускорения колеса, определяют знак и величину производной ускорения колеса, задают первое, второе и третье пороговые значения скольжения колеса ПОР DV1, ПОР DV2, ПОР DV3, связанные между собой соотношением ПОР DV1<ПОР DV2<ПОР DV3, причем первое пороговое значение ПОР DV1 определяет наименьшую величину скольжения колеса, а третье пороговое значение ПОР DV3 определяет ее наибольшую величину. Задают первое, второе и третье пороговые значения отрицательного ускорения колеса ПОР А1, ПОР А2, ПОР A3, связанные между собой соотношением ПОР А1<ПОР А2<ПОР A3, причем первое пороговое значение ПОР А1 определяет наименьшую величину отрицательного ускорения колеса, а третье пороговое значение ПОР A3 определяет его наибольшую величину, задают пороговое значение положительного ускорения колеса ПОР А4. Задают пороговое значение положительной производной ускорения колеса ПОР DA1, сравнивают величины скольжения колеса, отрицательного и положительного ускорения колеса и положительной производной ускорения колеса с их пороговыми значениями. Управляющие сигналы, по которым осуществляют ступенчатое регулирование давления в тормозном цилиндре, вырабатывают на основании результатов сравнения скольжения колеса, отрицательного и положительного ускорения колеса, положительной производной ускорения колеса с их пороговыми значениями, при этом увеличивают давление до тех нор, пока величина скольжения колеса не достигнет второго порогового значения ПОР DV2 или величина отрицательного ускорения колеса не достигнет второго порогового значения ПОР А2. Удерживают давление на постоянном уровне до тех пор, пока величина скольжения колеса не достигнет третьего порогового значения ПОР DV3 или величина отрицательного ускорения колеса не достигнет третьего порогового значения ПОР A3. Уменьшают давление до тех пор, пока величина скольжения колеса не достигнет второго порогового значения ПОР DV2 и величина отрицательного ускорения колеса не достигнет второго порогового значения ПОР А2, или, если ускорение колеса станет положительным, пока его величина не достигнет порогового значения ПОР А4, или, если производная ускорения колеса станет положительной, пока ее величина не достигнет порогового значения ПОР DA1, удерживают давление на постоянном уровне до тех пор, пока величина скольжения колеса не достигнет первого порогового значения ПОР DV1 и величина отрицательного ускорения колеса не достигнет первого порогового значения ПОР А1, увеличивают давление и далее цикл изменения давления повторяют. Техническим результатом является повышение быстродействия и точности способа предотвращения юза тормозящего колеса. 3 ил.
| Способ адаптивного управления колесными тормозами по условиям сцепления антиблокировочной системой | 1990 |
|
SU1772022A1 |
| Способ автоматического управления колесными тормозами | 1981 |
|
SU1009843A1 |
| GB 1398453 A, 25.06.1975 | |||
| Устройство для получения рекламных надписей при помощи освещаемых сбоку струй пара, дыма или жидкости | 1925 |
|
SU2555A1 |

