Изобретение касается способа регулирования или управления силой амортизации регулируемых амортизаторов в автомобилях, в частности в автомобилях промышленного назначения, согласно родовому понятию п. 1 формулы изобретения и устройства с признаками родового понятия п. 13 формулы изобретения.
При конструктивном исполнении систем регулирования шасси всегда необходим компромисс между комфортом и безопасностью движения. Идеальное шасси должно как можно лучше демпфировать колебания, возбуждаемые неровностями дорожного полотна, и одновременно по возможности постоянно поддерживать силы, действующие в точке соприкосновения колеса с опорной поверхностью, на заданном значении, потому что при этом колеса обладают наибольшим потенциалом продольного и бокового ведения и ведут транспортное средство с оптимальной безопасностью.
Имеющиеся в настоящее время системы амортизаторов в транспортных средствах могут быть разделены на три группы: пассивные, полуактивные и активные системы амортизаторов. У пассивных систем амортизаторов величина и направление создаваемой амортизатором силы зависят только от относительной скорости амортизатора. В пассивных системах амортизаторов изменение силы амортизации во время режима движения не предусмотрено. Регулировка транспортного средства, имеющего пассивные противоударные амортизаторы, всегда представляет собой только некоторый компромисс, так как с помощью одной и той же настройки шасси должны покрываться различные состояния движения.
Решение этого конфликта целей заключается в применении полуактивных противоударных амортизаторов, которые обеспечивают возможность изменять характеристические кривые амортизаторов в широком диапазоне посредством электронного управления и при этом обеспечивать оптимальную настройку амортизаторов для различных ситуаций при движении в течение нескольких миллисекунд. Но также для различных состояний нагрузки, которые, в частности в автомобиле промышленного назначения, могут вызывать большие различия в отношении общей массы и положения центра тяжести, могут выбираться надлежащие предварительные настройки амортизаторов, которые имеют преимущество по отношению к одной единственной регулировке пассивных амортизаторов.
У полуактивных систем амортизаторов их характеристическая кривая во время движения может изменяться быстро и в широком диапазоне. В частности, такие противоударные амортизаторы могут основываться на (пропорциональных) регулирующих клапанах, которые изменяют поток масла (англ. Continuous Damping Control, система непрерывной регулировки жесткости амортизаторов), или на магнето- или электрореологических жидкостях, при этом магнитное или электрическое поле влияет на вязкость жидкости и вместе с тем на силу амортизации. Из практики известны также комбинации этих технологий. Таким образом разные программы регулирования посредством одного исполнительного элемента в зависимости от текущей ситуации при движении могут настраивать оптимальную силу амортизации. У активных систем амортизаторов посредством исполнительного органа желаемую силу предоставляют в каждом направлении, независимо от относительной скорости амортизатора.
В уровне техники уже предлагались многочисленные способы регулирования или управления силой амортизации регулируемых амортизаторов.
Так, в DE 101 26 933 A1 раскрыт способ в соответствии с родовым понятием, при котором регулирование или управление осуществляется в зависимости от скорости амортизаторов, и сигналы скорости амортизаторов определяются посредством датчиков расстояния и образования разности сигналов датчиков расстояния на протяжении установленной разности временных интервалов.
DE 100 35 150 A1 раскрывает транспортное средство, имеющее управляемые амортизаторы колебаний, амортизирующие свойства которых настраиваются в зависимости от высоты тормозного давления, причем при необходимости дополнительно также еще возможно регулирование, зависимое от скорости транспортного средства. При этом амортизирующие свойства могут представляться в виде характеристических кривых, которые допускают либо «жесткую» настройку, то есть большую амортизацию, либо «мягкую» настройку, то есть небольшую амортизацию. В зависимости от тормозного давления здесь выполняется по меньшей мере кратковременная настройка на «жесткую» характеристическую кривую.
DE 10 2004 053 695 A1 раскрывает способ амортизации колебаний кузова, шасси или колес автомобиля, при котором с помощью датчиков обнаруживается состояние торможения автомобиля, и при котором ускорения кузова и ускорения шасси или колес определяются отдельно с помощью датчиков. В соответствии с этим способом после распознавания состояния торможения и после превышения некоторого предельного значения ускорения кузова и/или ускорения колес, определяемого с помощью датчиков, в течение первого периода колебаний кузова жесткая характеристика амортизации для упомянутых колес или осей настраивается и сохраняется до тех пор, пока по ускорениям кузова и/или ускорения колес, определяемым с помощью датчиков, не будет установлено изменение нагрузки на колеса или уменьшение нагрузки на колеса ниже некоторого минимального значения. Только после этого амортизаторы регулируются в пределах заданных характеристических кривых амортизации по степени сжатия и отдачи.
DE 198 03 370 A1 раскрывает способ эксплуатации устройства подвески и амортизации автомобиля, при котором амортизаторы отдельных колес при наличии сигнала ускорения, находящегося вне регулярных значений, запираются или становятся более жесткими. Тем самым должно предотвращаться раскачивание кузова.
В US 4,741,554 показана система регулирования для шасси автомобилей, с помощью которой должно предотвращаться слишком сильная продольная качка и раскачивание транспортного средства (англ. anti-dive and anti-rebound system, система, предотвращающая продольную качку кузова и предотвращающая отдачу). При этом при торможении в зависимости от положения высоты кузова, определяемого с помощью датчиков, осуществляется переключение амортизации на более жесткую характеристику. Эта более жесткая характеристика сохраняется на определенный период времени. В состоянии без торможения и выше определенной предельной высоты кузова включается «мягкая» амортизация.
EP 0 795 429 A2 раскрывает способ управления амортизатором, который предоставляет так называемый алгоритм «skyhook» при нормальном движении, а при торможении должен подавлять колебания нагрузки на колеса. В зависимости от буксования, определяемого путем сравнения частот вращения колес с фактической скоростью кузова, в зависимости от тормозного давления, как стартового сигнала, и в зависимости от ускорения кузова здесь при торможении варьируемая настройка характеристики амортизации отдельных противоударных амортизаторов по степени отдачи и сжатия осуществляется по существу так, что варьируемым образом регулируется только одна из характеристик, то есть либо степень отдачи, либо степень сжатия, в то время как соответственно другая включена «мягко».
Общим для вышеназванных методов из уровня техники является то, что для регулирования или управления силой амортизации регулируемых амортизаторов посредством внутренних датчиков транспортного средства определяются один или несколько параметров, на основании которого или которых можно делать вывод о требовании к шасси и/или качестве дорожного полотна. Примерами таких параметров, как пояснялось выше, являются состояние торможения автомобиля, ускорение кузова, т.е. вертикальное ускорение кузова, ускорения шасси или колес и/или скорость амортизаторов. Для измерения значений этих параметров могут, например, применяться датчики расстояния, которые измеряют дистанцию между колесом и кузовом транспортного средства в зависимости от времени.
Недостатком этих известных методов является то, что при этом адаптация настройки амортизаторов возможна только после того, как уже наступило ухудшение или улучшение качества дорожного полотна, что нежелательно с точек зрения безопасности, комфорта и износа.
Поэтому задачей изобретения является предоставить усовершенствованный способ регулирования или управления силой амортизации регулируемых амортизаторов в автомобилях, в частности в автомобилях промышленного назначения, с помощью которого могут устраняться недостатки традиционных технологий. Задачей изобретения является, в частности, предоставить способ регулирования или управления силой амортизации регулируемых амортизаторов в автомобилях, который улучшит безопасность движения и комфорт для водителя. Другой задачей является предоставить устройство для регулирования или управления силой амортизации регулируемых амортизаторов в автомобилях, с помощью которого могут устраняться недостатки традиционных устройств.
Эти задачи решаются с помощью способа с признаками п. 1 формулы изобретения и устройства с признаками п. 13 формулы изобретения. Предпочтительные варианты осуществления и применения изобретения являются предметом зависимых пунктов формулы изобретения и поясняются подробнее ниже в последующем описании с частичной ссылкой на фигуры.
В соответствии с изобретением предлагается способ регулирования или управления силой амортизации регулируемых амортизаторов в автомобилях, в частности в автомобилях промышленного назначения, имеющих активные и/или полуактивные системы амортизаторов. В соответствии с общими аспектами изобретения регулирование или управление осуществляется в зависимости от по меньшей мере одного параметра, на основании которого можно делать вывод о требовании к шасси и/или качестве дорожного полотна, причем значение указанного по меньшей мере одного параметра предоставляется внешним источником данных транспортного средства и принимается автомобилем в режиме движения.
Одна из особенностей изобретения заключается, таким образом, в том, что указанный или указанные параметры, используемый (используемые) для регулирования или управления силой амортизации, измеряются не с помощью или по меньшей мере не только с помощью внутренних датчиков транспортного средства, а предоставляются внешним источником данных транспортного средства. Посредством таких предоставляемых извне данных может реализовываться бóльшая глубина интерпретации текущей ситуации при движении и, в частности, также окружающей транспортное средство среды, благодаря чему могут заранее определяться и прогнозироваться требования к настройке амортизаторов или, соответственно, шасси.
Например, внешний источник данных транспортного средства может представлять собой по меньшей мере одно постороннее транспортное средство, предпочтительно едущее впереди постороннее транспортное средство, при этом значения указанного по меньшей мере одного параметра принимаются от указанного по меньшей мере одного постороннего транспортного средства беспроводным путем посредством связи транспортного средства с транспортным средством. Это дает то преимущество, что транспортное средство непосредственно, предпочтительно в реальном времени, может принимать от едущих впереди посторонних транспортных средств данные, релевантные для настройки амортизаторов, чтобы таким образом в течение короткого времени информироваться об измененных требованиях к настройке амортизаторов, например, предстоящем ухудшении дорожного полотна. Благодаря этому транспортное средство может при необходимости своевременно адаптировать свою настройку амортизаторов.
Далее в рамках изобретения существует возможность, чтобы внешний источник данных транспортного средства представлял собой банк данных, предпочтительно банк данных в интернете, в котором заложены значения указанного по меньшей мере одного параметра и могут скачиваться путем беспроводного дистанционного запроса. Это дает то преимущество, что транспортное средство, независимо от доступности указанного по меньшей мере одного параметра, посредством связи транспортного средства с транспортным средством может получать информацию для настройки шасси, создаваемую вне транспортного средства. Далее, по этому варианту может осуществляться доступ к самым различным банкам данных или так называемым большим источникам данных (BigData), которые содержат данные, релевантные для настройки амортизаторов, и могут обрабатываться транспортным средством. Далее, вышеназванные данные постороннего транспортного средства могут временно сохраняться в банке данных, например, также для обеспечения возможности доступа к ним, когда между транспортными средствами невозможна связь транспортного средства с транспортным средством.
Например, указанный по меньшей мере один параметр может содержать информацию о погоде, информацию о движении транспорта, качество дорожного полотна и/или картографическую информацию, касающуюся текущего положения движения и/или маршрута движения транспортного средства. Информация о погоде может, например, указывать, следует ли по текущему положению движения и/или где-либо на предстоящем маршруте движения учитывать осадки или мокрое дорожное полотно. В этих местах управление или регулирование может устанавливать настройку амортизаторов, ориентированную на безопасность. Качество дорожного полотна, например, «хорошее», «нормальное», «плохое», может аналогичным образом указывать, следует ли по текущему положению движения и/или где-либо на предстоящем маршруте движения учитывать неровности дорожного полотна, выбоины и прочее. Соответственно на основании этих параметров может делаться вывод о требовании к шасси и/или качестве дорожного полотна и затем использоваться для настройки силы амортизации. По вышеназванному варианту осуществления может устанавливаться нацеленная на безопасность настройка силы амортизации регулируемого амортизатора, которая вызывает наименьшие возможные колебания нагрузки на колеса, когда, например, указанный по меньшей мере один параметр указывает информацию о погоде, и она указывает высокую вероятность дождя или снега в текущем положении движения автомобиля.
Другая предпочтительная возможность реализации изобретения предусматривает, что указанный по меньшей мере один параметр указывает рабочее состояние и/или ходовые качества по меньшей мере одного постороннего транспортного средства, которое в данный момент едет или ведется по той же дороге или по меньшей мере вблизи данного автомобиля. В случае приема указанного по меньшей мере одного параметра посредством связи транспортного средства с транспортным средством это постороннее транспортное средство предпочтительно представляет собой постороннее транспортное средство, едущее впереди относительно данного транспортного средства.
Один из вариантов этого варианта осуществления предусматривает, что указанный по меньшей мере один параметр указывает текущий ход изменения скорости постороннего транспортного средства, или на его основании можно делать вывод о текущем ходе изменения скорости. Например, на основании внезапного снижения скорости едущего впереди постороннего транспортного средства или на основании повышенной активности торможения можно делать заключение, в частности также о временном ухудшении, загрязнении состояния дорожного полотна или наличии на дорожном полотне посторонних предметов, когда дополнительно из других источников, например, на базе интернета, было определено, что нет ни соответствующего ограничения скорости, ни пробки. Если таким образом делается заключение об ухудшении состояния дорожного полотна, в свою очередь, может выбираться настройка амортизаторов, ориентированная на безопасность.
Далее, предпочтительно, если указанный по меньшей мере один параметр указывает активность амортизаторов или, соответственно, шасси, в частности движение колес и/или конструкции кузова указанного по меньшей мере одного транспортного средства, или можно делать вывод о них на его основании. Например, постороннее транспортное средство может предоставлять результаты измерений своих датчиков шасси посредством связи транспортного средства с транспортным средством в заданном нормированном виде. С помощью этих данных постороннего транспортного средства может непосредственно распознаваться предстоящая измененная неровность дорожного полотна, причем прежде, чем транспортное средство достигнет этого упомянутого места.
При варианте вышеназванных примеров осуществления соответствующие значения параметров предоставляются вместе с информацией о местоположении, например, в виде данных GPS, указывающей географическое место, к которому относится данное значение параметра. Это обеспечивает возможность точно предсказывать то место, в котором в ходе управления или регулирования должна адаптироваться сила амортизации.
По другому варианту осуществления регулирование или управление может осуществляться в зависимости от по меньшей мере одного параметра, определенного внутри транспортного средства, так что данные, определенные вне транспортного средства комбинируются с данными, определенными внутри транспортного средства, для улучшения регулирования или, соответственно, управления амортизаторами. Параметр, определенный внутри транспортного средства, может представлять собой определенный внутри транспортного средства параметр, как описано выше в связи с уровнем техники.
Однако особенно предпочтительно, если указанный по меньшей мере один параметр, определенный внутри транспортного средства, представляет собой параметр, на основании которого можно делать вывод о требовании к шасси и/или качестве дорожного полотна, и который предоставляется по меньшей мере одной системой ассистирования водителю.
Например, указанная по меньшей мере одна система ассистирования водителю может включать в себя темпомат для контроля расстояния, а определяемый внутри транспортного средства параметр - указывать скорость или ход изменения скорости едущего впереди постороннего транспортного средства, которая или которое непрерывно регистрируется посредством темпомата для контроля расстояния.
Другая возможность в рамках изобретения заключается в том, что указанная по меньшей мере одна система ассистирования водителю включает в себя систему камеры, систему лазера и/или систему радара транспортного средства, а определяемый внутри транспортного средства параметр указывает определенную с помощью такой системы текущую информацию о погоде и/или информацию о дорожном полотне, на основании которой, в свою очередь, можно делать вывод о требовании к шасси и/или качестве дорожного полотна.
По другому варианту осуществления принимаемые значения указанного по меньшей мере одного параметра внешнего источника данных транспортного средства проверяются на достоверность с помощью значений параметра, определенного внутри транспортного средства, и/или наоборот. Это означает, что используемые параметры внешнего источника (источников) данных транспортного средства и параметры, определенные внутри транспортного средства, могут содержать избыточную и/или дополнительную информацию для улучшения точности и надежности вывода о требовании к шасси и/или качестве дорожного полотна из этих источников данных. Например, на основании внезапного снижения скорости едущего впереди постороннего транспортного средства, которое регистрируется посредством темпомата для контроля расстояния, можно делать заключение об опасном торможении едущего впереди постороннего транспортного средства из-за ухудшения состояния дорожного полотна или посторонних предметов (например, частей шин и прочего), когда по другим внешним источникам данных транспортного средства, например, на базе интернета, на основании дополнительной информации о движении транспорта и картографической информации дополнительно было определено, что нет ни соответствующего ограничения скорости, ни пробки.
По одному из предпочтительных вариантов осуществления регулируемый амортизатор представляет собой полуактивный противоударный амортизатор шасси. Однако изобретение применимо не только для регулирования или управления полуактивными шасси. Управляемая или регулируемая система амортизации может представлять собой систему амортизации кабины водителя и/или систему грузового отсека автомобиля промышленного назначения. Здесь на переднем плане стоит т.н. регулирование по алгоритму «skyhook», так как опора кабины водителя не имеет прямого влияния на ведение колес.
По другому аспекту изобретения транспортное средство может выводить относимую к некоторому участку дорожного полотна, изменяющуюся во времени информацию, в частности качество дорожного полотна, информацию о движении транспорта, информацию о погоде, например, наличие снежно-ледяного образования, посредством внутренней системы датчиков транспортного средства и/или на основании системы распознавания дорожных знаков, собственных или посторонних транспортных средств. По этому аспекту транспортное средство создает картографические данные, на которых обозначены участки дорожного полотна, для которых была определена эта изменяющаяся во времени информация, например, участки дорожного полотна, которые имеют заранее определенное, в частности плохое качество дорожного полотна, и при этом определенная информация отнесена к обозначенным участкам дорожного полотна. По этому аспекту транспортное средство передает созданные картографические данные постороннему транспортному средству посредством связи транспортного средства с транспортным средством и/или в банк данных, предпочтительно банк данных в интернете. По этому варианту автомобили могут взаимно предоставлять информацию, которая может использоваться для регулирования или управления амортизаторами.
В рамках изобретения предлагается также устройство для регулирования или управления силой амортизации регулируемых амортизаторов в автомобилях, в частности в автомобилях промышленного назначения, имеющих активные и/или полуактивные системы амортизаторов, причем это устройство выполнено с возможностью осуществлять регулирование или управление в зависимости от по меньшей мере одного параметра, на основании которого можно делать вывод о требовании к шасси и/или качестве дорожного полотна. По общим аспектам изобретения это устройство выполнено с возможностью при движении получать значения указанного по меньшей мере одного параметра от внешнего источника данных транспортного средства. Устройство выполнено, в частности, с возможностью осуществлять раскрытый здесь способ. Во избежание повторов признаки, раскрытые чисто в связи со способом, должны также считаться раскрытыми и быть предметом заявки в связи с устройством.
Далее, изобретение касается автомобиля, в частности автомобиля промышленного назначения, имеющего раскрытое здесь устройство.
Вышеописанные предпочтительные варианты осуществления и признаки изобретения могут произвольно комбинироваться друг с другом. Другие подробности и преимущества изобретения описываются ниже со ссылкой на прилагаемые чертежи. Показано:
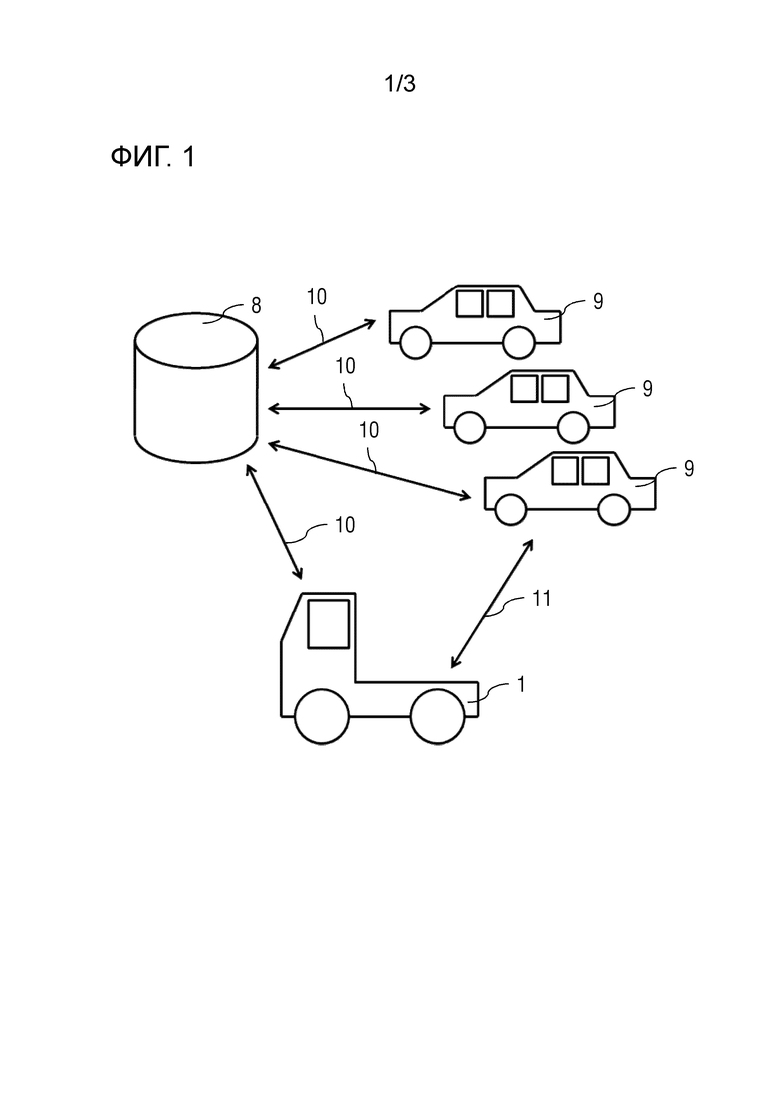
фиг. 1: схематичная иллюстрация связи транспортного средства с транспортным средством и дистанционного запроса банка данных по одному из вариантов осуществления изобретения;
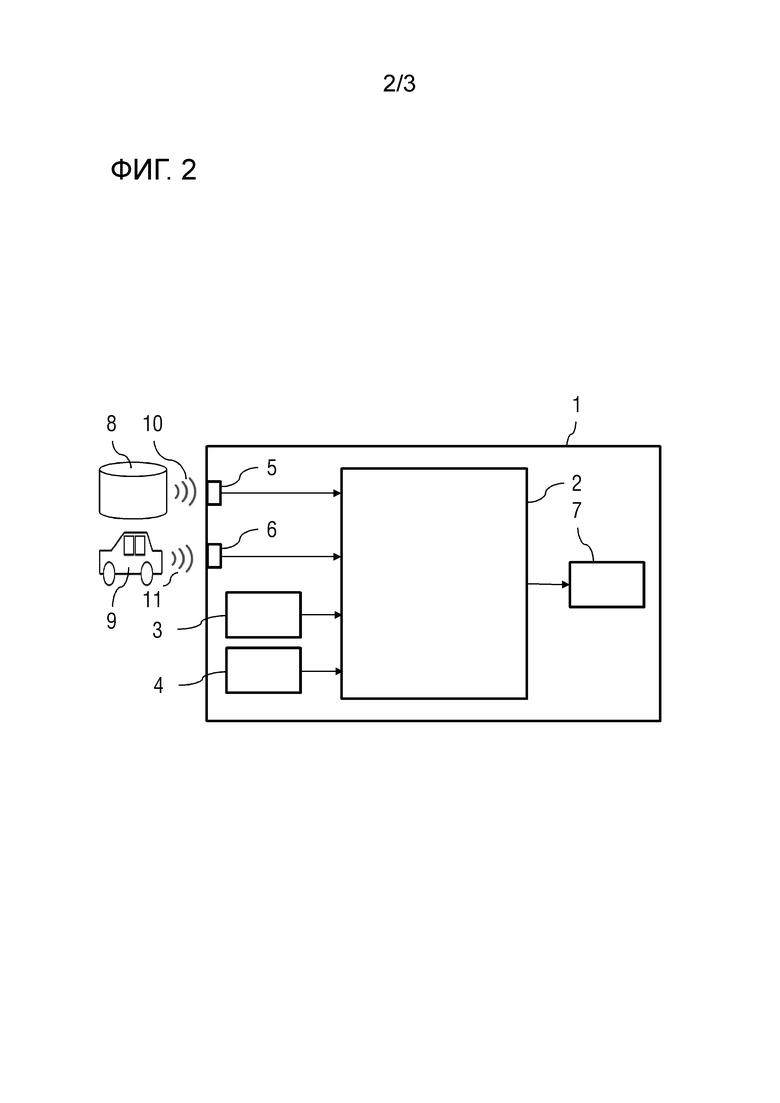
фиг. 2: схематичная блок-схема транспортного средства, имеющего устройство для регулирования или управления силой амортизации регулируемых амортизаторов по одному из вариантов осуществления изобретения; и
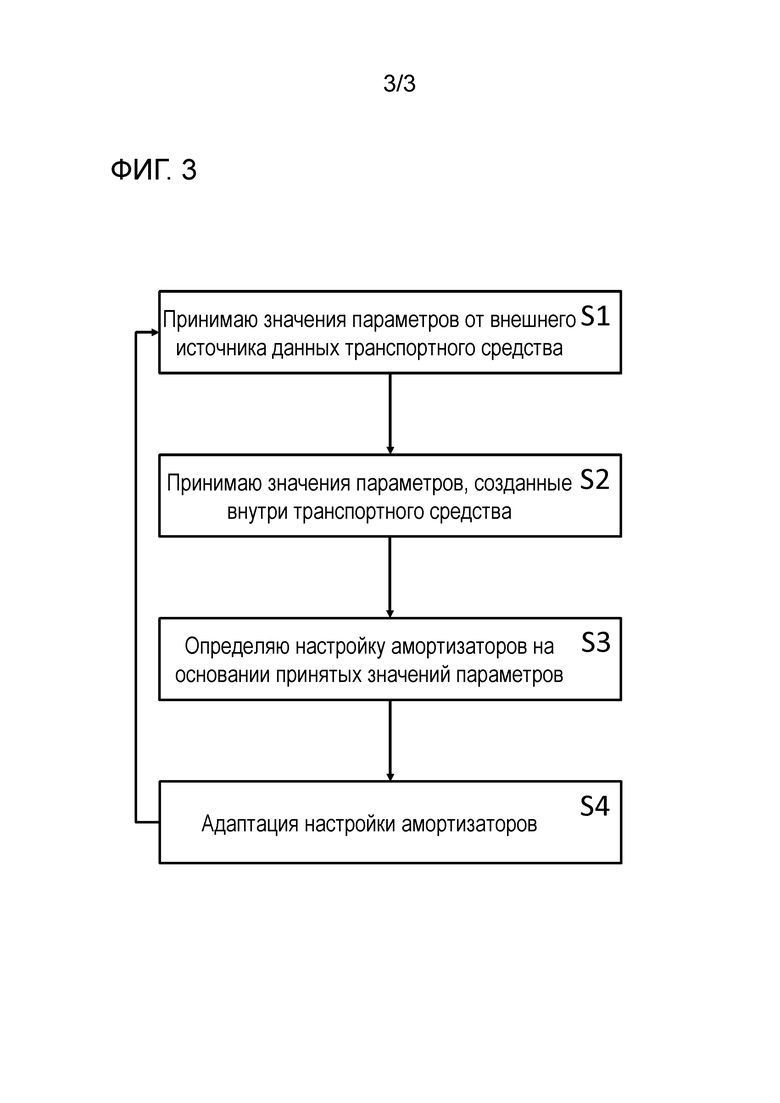
фиг. 3: схема последовательности операций для иллюстрации способа регулирования или управления силой амортизации регулируемых амортизаторов по одному из вариантов осуществления изобретения.
На фиг. 1 изображена связь транспортного средства с транспортным средством и дистанционный запрос банка данных по одному из вариантов осуществления изобретения. Автомобиль промышленного назначения включает в себя устройство для регулирования или управления силой амортизации полуактивных амортизаторов, которое ниже поясняется более подробно с помощью фиг. 2.
Устройство для регулирования или управления силой амортизации при движении автомобиля 1 промышленного назначения посредством связи транспортного средства с транспортным средством непрерывно поддерживает связь с другими транспортными средствами 9, которые находятся в пределах радиуса действия связи транспортного средства с транспортным средством, и которые также оснащены устройством для регулирования или управления силой амортизации, выполненным в соответствии с изобретением. Беспроводная связь транспортного средства с транспортным средством изображена стрелкой, обозначенной ссылочным обозначением 11. При этом связь транспортного средства с транспортным средством осуществляется двунаправлено, т.е., транспортное средство, участвующее в связи транспортного средства с транспортным средством, принимает от постороннего транспортного средства 9 значения параметров, на основании которых можно делать вывод о требовании к шасси и/или качестве дорожного полотна, и одновременно через интерфейс связи транспортного средства с транспортным средством посылает посторонним транспортным средствам 9 соответствующие значения параметров, определенные внутри транспортного средства.
Устройство 2 автомобиля 1 промышленного назначения в режиме движения поддерживает также связь с одним или несколькими внешними банками 8 данных, чтобы иметь доступ к заложенным там значениям параметров, на основании которых можно делать вывод о требовании к шасси и/или качестве дорожного полотна, и передает также для временного сохранения собственные определенные значения параметров одному или нескольким внешним банкам 8 данных, чтобы посторонние транспортные средства 9 имели к ним доступ. Аналогичным образом посторонние транспортные средства 9 поддерживают связь с внешним банком 8 данных. Беспроводная двунаправленная связь с одним или несколькими внешними банками 8 данных изображена стрелками, обозначенными ссылочным обозначением 10.
На фиг. 2 в грубом представлении показана блок-схема автомобиля 1 промышленного назначения, снабженного устройством 2 для регулирования или управления силой амортизации регулируемых амортизаторов. Также делается ссылка на фиг. 3, которая поясняет принцип действия устройства 2, а также в качестве примера с помощью схемы последовательности операций предлагаемый изобретением способ в целом.
Транспортное средство 1 оснащено несколькими полуактивными амортизаторами 7, характеристика амортизации которых может регулироваться устройством 2. При этом для колес автомобиля 1 промышленного назначения, а также для кабины водителя автомобиля промышленного назначения собственно известным образом предназначены полуактивные амортизаторы 7. Противоударные амортизаторы 7 должны регулироваться в зависимости от ситуации при движении и качества дороги. Для определения настройки амортизаторов устройство 2 выполнено с возможностью принимать разные заданные параметры или, соответственно, их текущие значения, на основании которых можно делать вывод о требовании к шасси и/или качестве дорожного полотна, из разных внешних источников 8, 9 данных (шаг S1) и внутренних источников 3, 4 данных (шаг S2).
Для этого устройство 2 в ходе шага S1, как уже описывалось в связи с фиг. 1, через интерфейс 6 связи транспортного средства с транспортным средством транспортного средства 1 непрерывно поддерживает связь с едущими впереди транспортными средствами 9, в случае если они соответственно выполнены с возможностью определять заданные параметры для управления или регулирования настроек амортизаторов и посредством связи транспортного средства с транспортным средством предоставлять другим транспортным средствам. Далее, устройство 2 через беспроводной интерфейс 5 транспортного средства, как уже тоже описывалось в связи с фиг. 1, поддерживает связь с одним или несколькими внешними банками 8 данных, чтобы иметь доступ к заложенным там значениям параметров, на основании которых можно делать вывод о требовании к шасси и/или качестве дорожного полотна.
Одновременно устройство 2 в ходе шага S2 непрерывно через шину данных CAN поддерживает связь с внутренними датчиками 4 транспортного средства, расположенными в области регулируемых амортизаторов и предоставляющими устройству 2 текущие значения одного или нескольких параметров, на основании которых можно делать вывод о требовании к шасси и/или качестве дорожного полотна. Далее, управление 2 выполнено, чтобы использовать по меньшей мере один параметр, который создается системой 3 ассистирования водителю транспортного средства 1.
Устройство 2 выполнено для осуществления способа управления или регулирования настроек амортизаторов в рамках вышестоящей рабочей стратегии, чтобы на основании значений параметров, принимаемых из разных источников 3, 4, 8 и 9 данных, регистрировать ситуацию при движении, желание водителя, состояние дорожного полотна и/или транспортного средства и затем соответственно заданным оценочным критериям, настраивать, например, регулирование амортизаторов, ориентированное на комфорт или безопасность (шаг S3). Затем на нижестоящем уровне регулируются движения транспортного средства и кабины водителя и характер колебаний отдельных колес, при этом общее условие регулирования задается рабочей стратегией в зависимости от данной ситуации (шаг S4).
Ниже с помощью иллюстрирующих примеров поясняются другие аспекты шагов S1-S4.
Расположенные в области регулируемых амортизаторов 7 внутренние датчики 4 транспортного средства, посредством которых регистрируется движение одного или нескольких элементов, непосредственно находящихся под влиянием амортизаторов 7, таких как движения колес и кузова, по одному из вариантов, как уже описывалось в связи с уровнем техники, может быть выполнены с возможностью определять ускорение кузова, ускорения шасси или колес и/или скорость амортизаторов. Например, могут быть предусмотрены датчики расстояния, которые измеряют дистанцию между колесом и кузовом транспортного средства в зависимости от времени.
В зависимости от непрерывно определяемых значений параметров внутренних датчиков 4 транспортного средства характеристика амортизации может адаптироваться собственно известным образом. На основании повышенного ускорения кузова может, например, делаться заключение о повышенной неровности или волнистости грунта дорожного полотна, так как ускорение кузова зависит от макроструктуры основания, и транспортное средство после первого погружения, в зависимости от жесткости настроенной амортизации и в зависимости от степени неровности, отпружинивает с разной силой, т.е. кузов ускоряется в вертикальном направлении и от основания. Когда измеренное таким образом ускорение кузова превышает заданное пороговое значение, на его основании можно делать вывод о неровном качестве дорожного полотна и, следовательно, «более мягкой» настройке амортизаторов, как требовании к шасси, и тогда характеристика амортизаторов может регулироваться соответственно в пределах заданных характеристических кривых амортизаторов.
На основании результатов измерений внутренних датчиков 4 транспортного средства можно, таким образом, делать вывод о требовании к шасси и/или качеству дорожного полотна, как описано выше, однако только когда уже возникло это измененное требование к шасси и/или качество дорожного полотна, например, в виде повышенной неровности или волнистости грунта дорожного полотна.
Поэтому в соответствии с изобретением это известное управление или регулирование настроек амортизаторов дополняется и совмещается с вышестоящей рабочей стратегией. Для этого дополнительно используются один или несколько параметров, на основании которых тоже можно делать вывод о требовании к шасси и/или качестве дорожного полотна, однако которые предоставляются внешним источником 8, 9 данных транспортного средства, и текущие значения которых принимаются транспортным средством 1 в режиме движения.
Принятые для этого в шаге S1 данные могут, например, представлять собой информацию о погоде. При дожде, снеге и прочем на основе этих знаний устанавливается настройка амортизаторов, нацеленная на высокую безопасность, с целью наименьших колебаний нагрузки на колеса.
Далее, эти данные могут включать в себя информацию о движении транспорта и/или картографического материала. Например, в банк 8 данных могут быть заложены картографические данные, в которых маркированы места и/или участки с плохими покрытиями дорожного полотна и т.д. При наличии таких картографических данных они запрашиваются и обрабатываются устройством 2 для текущего маршрута движения, так что устройство 2 распознает предстоящее ухудшение дорожного полотна прежде, чем оно достигается транспортным средством 1. Устройство 2 может в этом случае своевременно адаптировать характеристики амортизаторов 7 до достижения ухудшения дорожного полотна, прежде чем внутренние датчики 4 транспортного средства смогут распознать это ухудшение дорожного полотна по движению транспортного средства или кузова кабины водителя. С другой стороны, транспортное средство 1 может «маркировать» участки пути посредством динамических картографических данных, всякий раз, когда они распознаются посредством внутренних датчиков 4 транспортного средства, и так, посредством маркированных картографических данных, сообщать другим транспортным средствам или внешнему банку 8 данных о плохих покрытиях дорожного полотна.
Далее, устройство 2 может непрерывно наблюдать скорость едущих впереди транспортных средств, которая посредством связи транспортного средства с транспортным средством принимается от едущих впереди посторонних транспортных средств или получается непосредственно от темпомата для контроля расстояния (система регулирования скорости) транспортного средства. Часто получаемая с помощью камеры информация от темпомата для контроля расстояния или информация от датчиков, таких как лазер, радар и прочее, позволяет получать бóльшую глубину интерпретации текущей ситуации при движении и окружающей транспортное средство среде, чем с помощью традиционных датчиков 4, которые регистрируют только движение элементов, непосредственно находящихся под влиянием амортизаторов 7, таких как движения колес и кузова, благодаря чему достигается лучшая прогнозируемость. Например, на основании внезапного снижения скорости едущих впереди посторонних транспортных средств может делаться заключение о возможном ухудшении состояния дорожного полотна, когда из других источников на базе интернета известно, что нет ни лимита скорости, ни пробки.
Таким образом, в шаге S3 обрабатываются и объединяются данные различных источников 3, 4, 8, 9 данных. Благодаря использованию различных источников 3, 4, 8, 9 данных с помощью поперечных связей между отдельной информацией может генерироваться дополнительная информация, и при этом более точно и заблаговременно предсказываться изменяющиеся требования к амортизаторам. Если, например, по ходу изменения скорости движения едущего впереди транспортного средства распознается опасное торможение едущего впереди постороннего транспортного средства, устройство 2 отдает команду настройки шасси, которая приводит к минимальному тормозному пути, например, посредством т.н. регулирования по алгоритму «groundhook».
Другое преимущество применения различных источников 3, 4, 8, 9 заключается в том, что с помощью дополнительной и/или избыточной информации на основании значений параметров можно с меньшей вероятностью ошибок делать вывод о требовании к шасси и/или качестве дорожного полотна. Так, например, запрошенные из внешнего банка 8 данных в интернете данные, касающиеся текущих условий погоды и движения транспорта, могут согласовываться и подтверждаться посредством систем камер и/или лазерных/радарных датчиков других систем 3 ассистирования. При этом более высокая надежность информации улучшает качество данных.
Изобретение не ограничено описанными выше предпочтительными примерами осуществления. Напротив, возможно множество вариантов и модификаций, которые тоже используют идею изобретения и поэтому попадают в объем охраны. В частности, изобретение претендует также на защиту предмета и признаков зависимых пунктов формулы изобретения, независимо от пунктов формулы изобретения, на которые делалась ссылка.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Автомобиль промышленного назначения
2 Устройство для управления или регулирования силой амортизации регулируемых амортизаторов
3 Система ассистирования водителю
4 Датчики транспортного средства
5 Беспроводной интерфейс
6 Интерфейс для связи транспортных средств
7 Регулируемый полуактивный амортизатор
8 Банк данных
9 Постороннее транспортное средство
10 Беспроводная передача данных между банком данных и транспортным средством
11 Связь транспортного средства с транспортным средством.
Изобретение касается способа регулирования или управления силой амортизации в автомобилях. Автомобиль имеет устройство для регулирования или управления силой амортизации регулируемых амортизаторов в автомобилях. Устройство имеет полуактивные системы амортизаторов и выполнено с возможностью осуществлять регулирование или управление в зависимости от по меньшей мере одного параметра, принимать в режиме движения значение указанного параметра от внешнего источника данных транспортного средства, осуществлять регулирование или управление в зависимости от определенного внутри транспортного средства параметра по меньшей мере одной системы ассистирования водителю. На основании параметра можно делать вывод о требовании к шасси и/или качестве дорожного полотна. Достигается улучшение безопасности движения и комфорта для водителя. 3 н. и 12 з.п. ф-лы, 3 ил.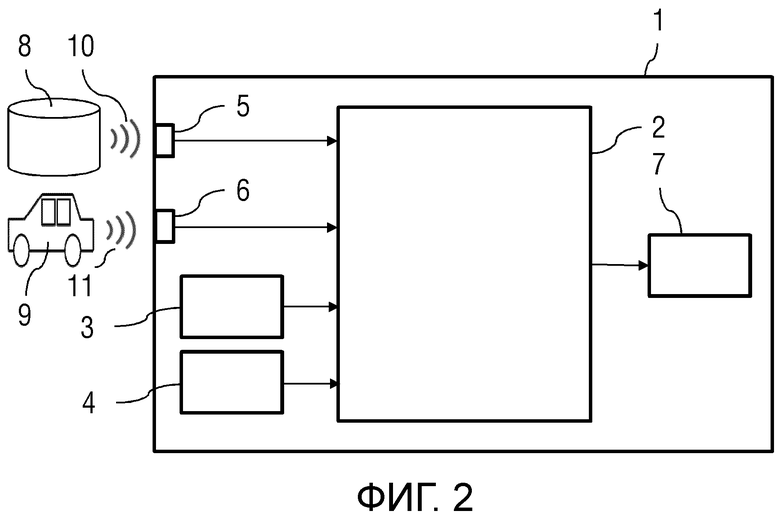
1. Способ регулирования или управления силой амортизации регулируемых амортизаторов (7) в автомобилях (1), в частности в автомобилях промышленного назначения, имеющих полуактивные системы амортизаторов, при этом регулирование или управление осуществляют в зависимости от по меньшей мере одного параметра, на основании которого можно делать вывод о требовании к шасси и/или качестве дорожного полотна, при этом значение указанного по меньшей мере одного параметра предоставляют внешним источником (8, 9) данных транспортного средства и принимают автомобилем (1) в режиме движения,
отличающийся тем, что
регулирование или управление осуществляют в зависимости от по меньшей мере одного определенного внутри транспортного средства параметра по меньшей мере одной системы (3) ассистирования водителю, на основании которого можно делать вывод о требовании к шасси и/или качестве дорожного полотна.
2. Способ по п. 1, отличающийся тем,
(a) что внешний источник данных транспортного средства представляет собой по меньшей мере одно постороннее транспортное средство (9), и значение указанного по меньшей мере одного параметра принимают беспроводным путем посредством связи (10) транспортного средства с транспортным средством; и/или
(b) что внешний источник данных транспортного средства представляет собой банк (8) данных, предпочтительно банк данных в интернете, в котором заложено значение указанного по меньшей мере одного параметра и может быть считано автомобилем (1) посредством беспроводного дистанционного запроса (11).
3. Способ по п. 1 или 2, отличающийся тем, что указанный по меньшей мере один параметр указывает информацию о погоде, информацию о движении транспорта, качество дорожного полотна и/или картографическую информацию, касающуюся текущего положения движения транспортного средства (1).
4. Способ по п. 1, отличающийся тем, что указанный по меньшей мере один параметр указывает рабочее состояние и/или ходовые качества по меньшей мере одного постороннего транспортного средства (9), которое в текущий момент едет по той же дороге или по меньшей мере вблизи данного автомобиля (1).
5. Способ по п. 4, отличающийся тем, что на основании указанного по меньшей мере одного параметра можно делать вывод о текущем ходе изменения скорости или активности шасси, в частности движении колес и/или конструкции кузова, по меньшей мере одного постороннего транспортного средства (9).
6. Способ по п. 3, отличающийся тем, что данные значения параметров предоставляют вместе с информацией о местоположении, указывающей географическое место, к которому относят данный параметр.
7. Способ по любому из пп. 1-6, отличающийся тем, что указанная по меньшей мере одна система ассистирования водителю включает в себя темпомат для контроля расстояния, а определяемый внутри транспортного средства параметр указывает скорость или ход изменения скорости едущего впереди постороннего транспортного средства.
8. Способ по любому из пп. 1-6, отличающийся тем, что указанная по меньшей мере одна система ассистирования водителю включает в себя систему камеры, систему лазера и/или систему радара транспортного средства, а определяемый внутри транспортного средства параметр указывает определенную с помощью такой системы текущую информацию о погоде и/или информацию о дорожном полотне.
9. Способ по любому из пп. 1-6, отличающийся тем, что принимаемые значения указанного по меньшей мере одного параметра внешнего источника данных транспортного средства проверяют на достоверность на основании значений параметра, определенного внутри транспортного средства.
10. Способ по п. 1, отличающийся тем, что устанавливают нацеленную на безопасность настройку силы амортизации регулируемого амортизатора, которая вызывает наименьшие возможные колебания нагрузки на колеса, когда
(a) указанный по меньшей мере один параметр указывает информацию о погоде, и эта информация указывает высокую вероятность дождя или снега в текущем положении движения автомобиля (1); и/или
(b) на основании указанного по меньшей мере одного параметра можно делать вывод о текущем ходе изменения скорости или активности шасси по меньшей мере одного постороннего транспортного средства (9), которое в текущий момент едет по той же дороге или по меньшей мере вблизи данного автомобиля (1), и когда на основании хода изменения скорости можно делать вывод о повышенной активности торможения и/или имеется повышенная активность шасси постороннего транспортного средства (9).
11. Способ по п. 1, отличающийся тем, что
(a) что регулируемый амортизатор (7) представляет собой полуактивный противоударный амортизатор шасси; и/или
(b) что система амортизации представляет собой систему амортизации кабины водителя и/или систему грузового отсека автомобиля промышленного назначения.
12. Способ по п.1, отличающийся тем, что транспортное средство (1) регистрирует относимую к некоторому участку дорожного полотна, изменяющуюся во времени информацию, в частности качество дорожного полотна, информацию о погоде или информацию о движении транспорта посредством внутренней системы датчиков транспортного средства и/или системы распознавания дорожных знаков, создает картографические данные, на которых эта зарегистрированная, изменяющаяся во времени информация отнесена к соответствующим участкам дорожного полотна, и передает созданные картографические данные постороннему транспортному средству (9) посредством связи (10) транспортного средства с транспортным средством и/или в банк (8) данных, предпочтительно банк данных в интернете.
13. Устройство (2) для регулирования или управления силой амортизации регулируемых амортизаторов (7) в автомобилях (1), в частности в автомобилях промышленного назначения, имеющих полуактивные системы амортизаторов, причем это устройство (2) выполнено с возможностью:
- осуществлять регулирование или управление в зависимости от по меньшей мере одного параметра, на основании которого можно делать вывод о требовании к шасси и/или качестве дорожного полотна,
- принимать в режиме движения значение указанного по меньшей мере одного параметра от внешнего источника (8, 9) данных транспортного средства,
- осуществлять регулирование или управление в зависимости от по меньшей мере одного определенного внутри транспортного средства параметра по меньшей мере одной системы (3) ассистирования водителю, на основании которого можно делать вывод о требовании к шасси и/или качестве дорожного полотна.
14. Устройство (2) по п. 13, отличающееся тем, что это устройство выполнено с возможностью осуществлять способ по одному из пп. 1-12.
15. Автомобиль (1), в частности автомобиль промышленного назначения, имеющий устройство (2) по п. 13 или 14.
| DE 10344053 A1, 08.04.2004 | |||
| US 2012203428 A1, 09.08.2012 | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| RU 2011150503 A, 20.06.2013. | |||

