Изобретение касается системы регулирования уровня кабины водителя автомобиля промышленного назначения относительно шасси автомобиля. Изобретение касается также способа эксплуатации для регулирования уровня кабины водителя автомобиля промышленного назначения относительно шасси автомобиля.
Из уровня техники известны механизмы упругой подвески или, соответственно, демпфирования для опирания кабины водителя на шасси автомобиля посредством упругой подвески. С их помощью водитель автомобиля промышленного назначения может лучше защищаться от сотрясений, обусловленных дорожным полотном, например, неровностями дороги или выбоинами. Чтобы достичь хорошего демпфирующего действия и высокого комфорта демпфирования даже при сильных сотрясениях, обусловленных дорожным полотном, желателен как можно более длинный ход упругой подвески. Длинный ход упругой подвески приводит, однако, к большому зазору между кабиной водителя и шасси, а также соответственно большей конструктивной высоте автомобиля промышленного назначения. Это ухудшает коэффициент cW (аэродинамического сопротивления) и вместе с тем расход топлива автомобиля промышленного назначения. Поэтому такого рода системы недостаточным образом пригодны для того, чтобы обеспечивать возможность как высокого комфорта амортизации, так и эффективного расхода топлива и адаптации системы упругой подвески или, соответственно, демпфирования к самым разным дорожно-транспортным ситуациям, возникающим в реальном дорожном движении.
В механизме упругой подвески или, соответственно, демпфирования, известном из уровня техники, применяются пневматические амортизационные стойки, которые сами себя нивелируют посредством внутренней или внешней системы рычагов и клапанов и, таким образом, устанавливают фиксированное, не подверженное влиянию расстояние между кабиной водителя и шасси автомобиля. У этого механизма упругой подвески, когда кабина водителя вследствие толчков со стороны грунта или других воздействий движется относительно шасси, посредством закрепленного на амортизационной стойке или внутреннего рычага приводится в действие клапан, так что при движениях амортизационной стойки постоянно воздух спускается в окружающую среду или воздух накачивается в амортизационную стойку, как только происходит выход из номинального положения. Недостатком этого механизма упругой подвески является высокий расход воздуха, обусловленный постоянным впуском и выпуском воздуха.
Задачей изобретения является предоставить опору кабины водителя автомобиля промышленного назначения, которая как обладает высоким комфортом демпфирования, так и обеспечивает возможность эффективной эксплуатации автомобиля.
Описанная выше задача решается с помощью системы и способа эксплуатации для регулирования уровня кабины водителя автомобиля промышленного назначения относительно шасси автомобиля в соответствии с независимыми пунктами формулы изобретения. Предпочтительные примеры осуществления изобретения описываются в зависимых пунктах формулы изобретения.
В соответствии с настоящим изобретением система регулирования уровня кабины водителя автомобиля промышленного назначения относительно шасси автомобиля включает в себя подпружиненную опору для пружинного опирания кабины водителя на шасси автомобиля, а также сенсорное средство для определения расстояния, которое выполнено, чтобы регистрировать относительные движения и/или расстояние между кабиной водителя и шасси автомобиля. Под кабиной водителя понимается часть кузова автомобиля, которая образует помещение для водителя автомобиля и сопровождающих лиц. Шасси автомобиля ниже будет также называться шасси или ходовой частью.
Система включает в себя средство управления, которое выполнено для изменяемой настройки подпружиненной опоры, при этом для настройки подпружиненной опоры используются сигналы сенсорного средства для определения расстояния. Кроме того, подпружиненная опора может устанавливаться в первое положение по высоте, так чтобы средство управления управляло расстоянием между кабиной водителя и шасси автомобиля, устанавливая его на первое номинальное расстояние.
Для этого средство управления выполнено, чтобы на основании принятых сигналов сенсорного средства для определения расстояния распознавать, сокращается ли отклонение расстояния между кабиной водителя и шасси от номинального расстояния или, соответственно, из нулевого положения, вызванное, например, неровностью дорожного полотна, снова до номинального расстояния или, соответственно, нулевого положения или нет. Если средство управления распознает длительное или, соответственно, не обусловленное нормальным подпружиненным движением отклонение от номинального положения, средство управления может осуществлять регулирующее воздействие для восстановления номинального расстояния. Сравнимым образом отклонение от параллельной ориентации кабины водителя относительно шасси, например, под весом водителя, вследствие чего кабина водителя в одном месте слегка опускается, может регистрироваться сенсорным средством для определения расстояния и соответственно корректироваться путем настройки подпружиненной опоры.
В соответствии с настоящим изобретением подпружиненная опора дополнительно или альтернативно может устанавливаться по меньшей мере в одно второе положение по высоте, так чтобы средство управления управляло расстоянием между кабиной водителя и шасси автомобиля, устанавливая его на второе номинальное расстояние. Другими словами, подпружиненная опора обладает возможностью перестановки по высоте по меньшей мере в два заданных положения по высоте. Измененное положение по высоте опоры изменяет (номинальное) расстояние между кабиной водителя и шасси и вместе с тем определенное нулевое положение, вокруг которого кабина водителя может пружинить относительно шасси.
При этом средство управления устанавливает опору в первое или в указанное по меньшей мере одно второе положение по высоте в зависимости от по меньшей мере одного параметра, касающегося участка движения и/или состояния движения автомобиля промышленного назначения. Особое преимущество изобретения заключается, таким образом, в том, что амортизация кабины водителя может адаптироваться к текущим условиям движения, чтобы, в зависимости от ситуации движения, выбирать то положение по высоте подпружиненной опоры, которое позволяет получить наилучший возможный компромисс между необходимым комфортом амортизации и низким расходом топлива.
Примером параметра, касающегося участка движения, может являться тип дороги в данный момент, так чтобы положение по высоте опоры могло изменяться в зависимости от того, едет ли автомобиль в данный момент, например, по автомагистрали, проселочной дороге или грунтовой дороге. Это имеет то преимущество, что при тех типах дороги, при которых следует в большей степени рассчитывать на неровности дороги, выбоины и пр., подпружиненная опора может устанавливаться в более высокое положение по высоте, чтобы тем самым увеличивать подпружиненный ход и повышать комфорт амортизации.
Если, напротив, тип дорожного полотна в данный момент, например, распознается как автомагистраль, у которой качество поверхности дорожного полотна, как правило, лучше, подпружиненная опора может опускаться в более низкое положение по высоте, так чтобы расстояние между кабиной водителя и шасси регулировалось на меньшую номинальную высоту. При типах дороги с хорошей поверхностью дорожного полотна пружинная длина (длина упругой подвески) может сокращаться без ухудшения комфорта, чтобы уменьшить зазор между кабиной водителя и шасси для улучшения коэффициента cW автомобиля.
Одним из примеров параметра, касающегося состояния движения автомобиля промышленного назначения, который используется для установки положения по высоте подпружиненной опоры, является текущая скорость движения. Средство управления предпочтительно выполнено, чтобы при скоростях движения ниже определенного порогового значения устанавливать более высокое положение по высоте с более длинным пружинным ходом, а при превышении этого порогового значения осуществлять опускание в более низкое положение по высоте и регулировать опору на соответственно меньшее номинальное расстояние. Опыт показывает, что скорость движения автомобиля промышленного назначения тогда, когда следует рассчитывать на более сильные сотрясения или толчки со стороны грунта, мала. В частности, при высоких скоростях движения меньшее расстояние между кабиной водителя и шасси оказывает сверхпропорциональное сильное действие на эффективность расхода топлива автомобиля.
Другим примером возможного параметра, на основании которого можно решить, будет ли опора устанавливаться в первое положение по высоте или по меньшей мере одно второе положение по высоте, являются действия водителя при управлении. Другими возможными величинами, по которым можно делать вывод, повышена или понижена ли потребность в амортизации вследствие условий движения в данный момент, являются поперечное ускорение, продольное ускорение или вертикальное ускорение автомобиля промышленного назначения, которые могут регистрироваться посредством соответствующих сенсоров.
По другому предпочтительному варианту осуществления может также непосредственно измеряться движение кабины водителя, например, посредством сенсорного средства для определения расстояния. Если движение кабины водителя превышает некоторое определенное значение, это может истолковываться как критерий потребности в повышенной амортизации, так что в этой ситуации опора устанавливается в положение по высоте с длинным пружинным ходом и большим номинальным расстоянием между кабиной водителя и шасси.
На основании такого рода параметров, например, при использовании соответствующих экспериментально определенных опытных данных, может определяться, когда предпочтительно переключение амортизации в измененное положение по высоте. Изобретение, однако, не ограничено использованием вышеназванных параметров, таких как скорость движения, тип дороги или поперечное ускорение. Так, альтернативно или дополнительно могут использоваться другие параметры, по которым можно делать вывод, является ли в данный момент потребность в амортизации повышенной или пониженной вследствие дорожных условий в данный момент, чтобы при сниженной потребности амортизации понижать положение по высоте для улучшения эффективности расхода топлива.
Предпочтительно зарегистрированные значения вышеназванных параметров, которые имеют непрерывные значения, интегрируются на некотором определенном интервале времени, и затем определяется, превышает ли это интегрированное значение некоторое определенное пороговое значение, чтобы таким образом можно было делать надежное заключение о потребности в амортизации в данный момент.
Система регулирования уровня кабины водителя может быть выполнена так, чтобы подпружиненная опора могла устанавливаться только в два различных положения по высоте, так чтобы возможно было переключение между «комфортным положением» с большой высотой амортизации и большим номинальным расстоянием между кабиной водителя и шасси и «аэродинамическим положением» с меньшим пружинным ходом и меньшим номинальным расстоянием между кабиной водителя и шасси. Это делает возможным ситуативно адаптированное изменение режима амортизации автомобиля промышленного назначения при эффективных затратах.
В другом предпочтительном варианте осуществления подпружиненная опора может обладать возможностью установки во множество разных положений по высоте, причем каждое из этих положений по высоте соответствует некоторому определенному номинальному расстоянию между кабиной водителя и шасси, соблюдение которого регулируется средством управления, после того, как было установлено это положение по высоте. Кроме того, можно создать систему регулирования уровня, у которой возможна ступенчатая установка положения по высоте подпружиненной опоры. Это имеет то преимущество, что амортизация кабины водителя еще более гибко может адаптироваться к условиям движения в данный момент, чтобы, в зависимости от ситуации движения, выбирать то положение по высоте опоры, которое позволяет получить наилучший возможный компромисс между необходимым комфортом амортизации и низким расходом топлива.
Другое преимущество изобретения заключается в том, что осуществляется «инертное» регулирование с установкой номинального расстояния установленного положения по высоте, во избежание постоянного впуска и выпуска воздуха при каждом движении пружинных элементов (элементы упругой подвески). Предпочтительно подпружиненная опора включает в себя для этого несколько пневматических и/или гидравлических пружинящих элементов, центральный блок клапанов для изменяемого снабжения пружинящих элементов средой, создающей давление, и устройство обеспечения, которое обеспечивает блок клапанов средой, создающей давление. По этому варианту осуществления средство управления выполнено в виде центрального устройства управления. Центральное устройство управления выполнено, чтобы определять, устанавливается ли снова у пружинящих элементов номинальное положение после отклонения от номинального положения вследствие нормального «сокращения». Если нет, через некоторое определенное время это регистрируется устройством управления путем аналитической обработки сигнала сенсорного средства для определения расстояния. Средство управления может тогда путем управления центральным блоком клапанов регулировать уровень давления таким образом, чтобы этот пружинящий элемент снова сокращался до установленного номинального расстояния.
«Инертное» регулирование может также реализовываться, когда вместо центрального устройств управления в качестве средства управления и вместо центрального блока клапанов на пружинящих элементах в каждом случае предусмотрены один клапан и один регулирующий элемент. Отдельные регуляторы принимают указанный по меньшей мере один параметр, касающийся участка движения и/или состояния движения автомобиля промышленного назначения, чтобы при необходимости изменять положение по высоте подпружиненной опоры. Регуляторы, кроме того, принимают корректируемое посредством сигналов сенсора для определения расстояния отклонение от текущего номинального положения каждого пружинящего элемента.
Регуляторы через клапан управляют уровнем рабочей среды пружинящего элемента, чтобы регулировать его, устанавливая на номинальное положение по высоте или, соответственно, на номинальное расстояние.
Предпочтительно сенсорное средство для определения расстояния включает в себя сенсоры для определения расстояния, например, датчики перемещений, которые всегда измеряют пружинное движение и ориентацию отдельных пружинящих элементов между кабиной водителя и шасси. Предпочтительно подпружиненная опора включает в себя работающие на сжатом воздухе амортизационные стойки, например, предусматриваются четыре амортизационные стойки для подпружиненного опирания кабины водителя на шасси.
Если предусмотрены четыре амортизационные стойки для пружинного опирания кабины водителя на шасси, на каждой или только на трех из этих амортизационных стоек могут предусматриваться датчики перемещений. Три точки измерения трех сенсоров для определения расстояния задают плоскость и вместе с тем ориентацию кабины водителя относительно шасси. При этом можно обойтись без четвертого сенсора для определения расстояния.
Кроме того, средство управления может быть выполнено так, чтобы регулировать расстояние между кабиной водителя и шасси автомобиля после повторного достижения некоторого условия переключения, например, после опускания ниже некоторого ранее превышенного порогового значения, устанавливая его обратно в предыдущее положение по высоте. Однако предпочтительно управление с установкой обратно в первое или, соответственно, предыдущее положение по высоте осуществляется только тогда, когда после предыдущего переключения прошло некоторое определенное «мертвое» время. Тем самым можно предотвратить, чтобы при колебаниях параметра вокруг условия переключения, например, колебании скорости движения вокруг некоторого определенного предельного значения, происходило изменение положения по высоте подпружиненного опирания и расстояния между кабиной водителя и шасси в одну и другую сторону.
Изобретение касается также способа эксплуатации для регулирования уровня кабины водителя автомобиля промышленного назначения относительно шасси автомобиля, включающего в себя этапы: регистрация относительного движения и/или расстояния между кабиной водителя и шасси автомобиля; установка подпружиненной опоры, которая пружинно опирает кабину водителя на шасси автомобиля, в первое положение по высоте и управление расстоянием между кабиной водителя и шасси автомобиля с установкой его на по меньшей мере одно первое номинальное расстояние, при этом зарегистрированное относительное движение и/или расстояние между кабиной водителя и шасси автомобиля используется для управления с установкой на первое номинальное расстояние. Кроме того, способ включает в себя установку подпружиненной опоры по меньшей мере в одно второе положение по высоте и регулирование расстояния между кабиной водителя и шасси автомобиля с установкой его по меньшей мере на одно второе номинальное расстояние, при этом зарегистрированное относительное движение и/или расстояние между кабиной водителя и шасси автомобиля используется для управления с установкой на второе номинальное расстояние. При этом установка подпружиненной опоры в первое или в указанное по меньшей мере одно второе положение по высоте осуществляется в зависимости от по меньшей мере одного параметра, касающегося участка движения и/или состояния движения автомобиля промышленного назначения. Описанные выше аспекты системы относятся также к предлагаемому изобретением способу эксплуатации и могут комбинироваться с ним без повторного явного упоминания этого.
Предпочтительные варианты осуществления настоящего изобретения ниже в качестве примера и наглядно поясняются подробнее со ссылкой на прилагаемые чертежи.
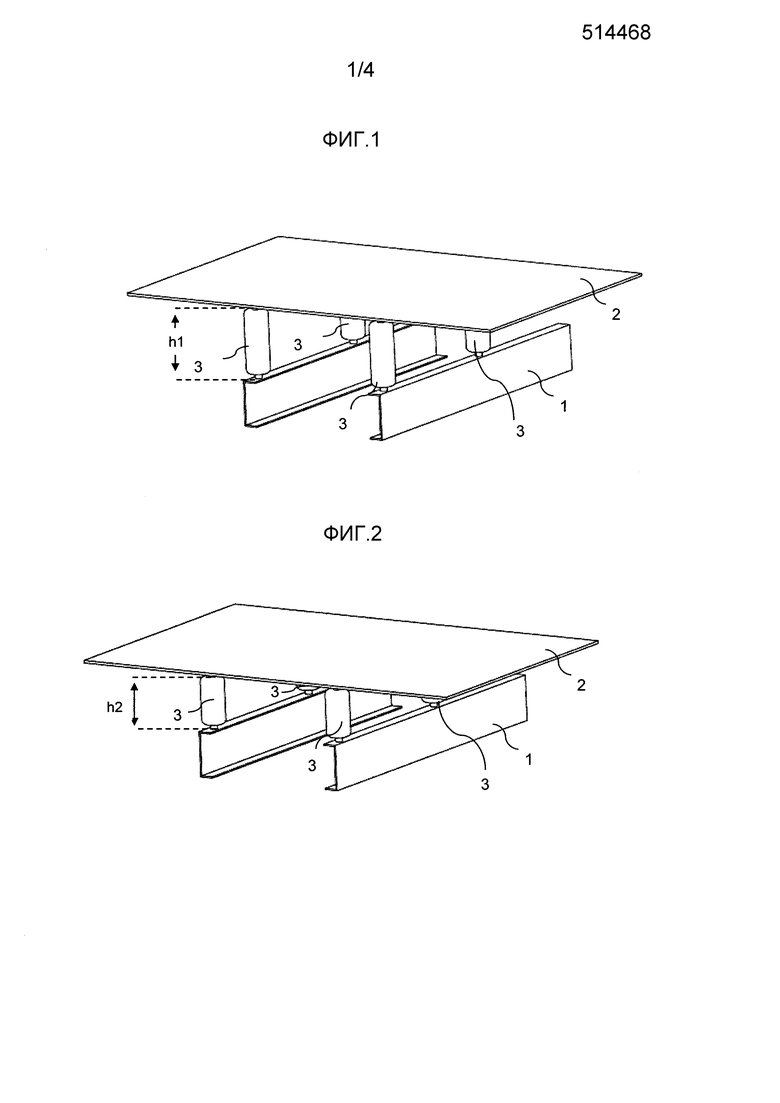
Фиг. 1 иллюстрирует в качестве примера подпружиненную опору кабины водителя на шасси автомобиля в первом положении по высоте;
фиг. 2: изображает подпружиненную опору с фиг. 1 во втором положении по высоте;
фиг. 3: изображает схематичную блок-схему системы регулирования уровня кабины водителя по одному из примеров осуществления;
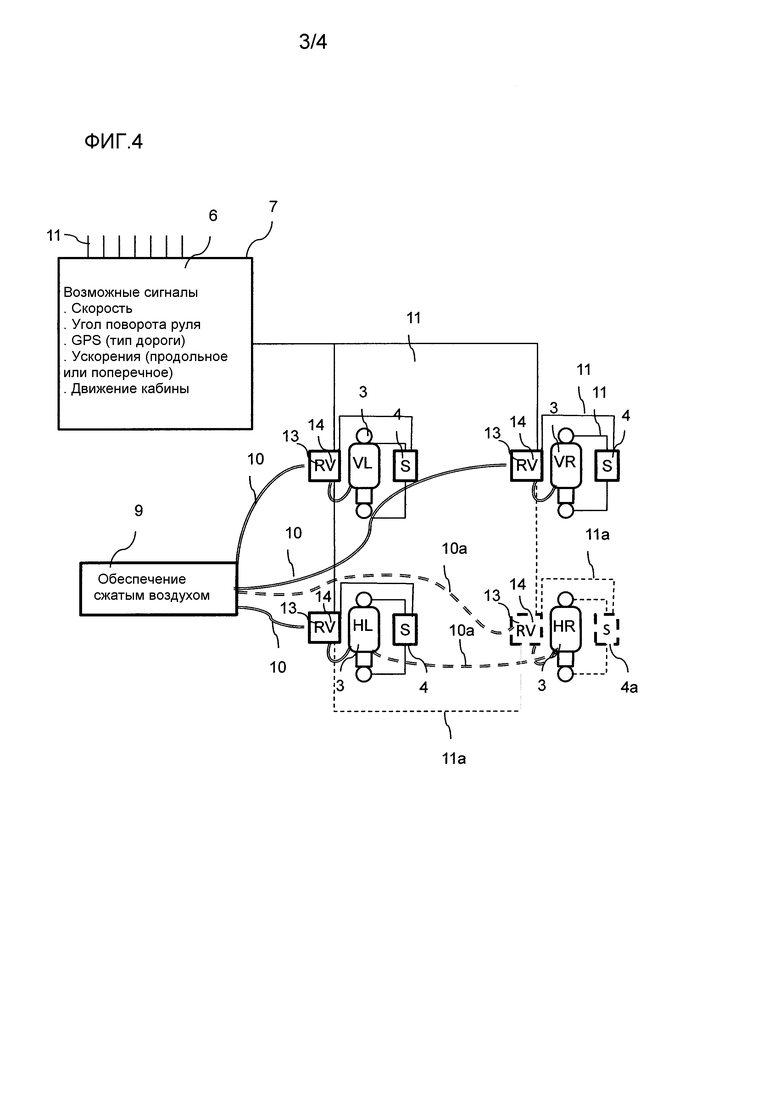
фиг. 4: изображает схематичную блок-схему системы регулирования уровня кабины водителя по другому примеру осуществления; и
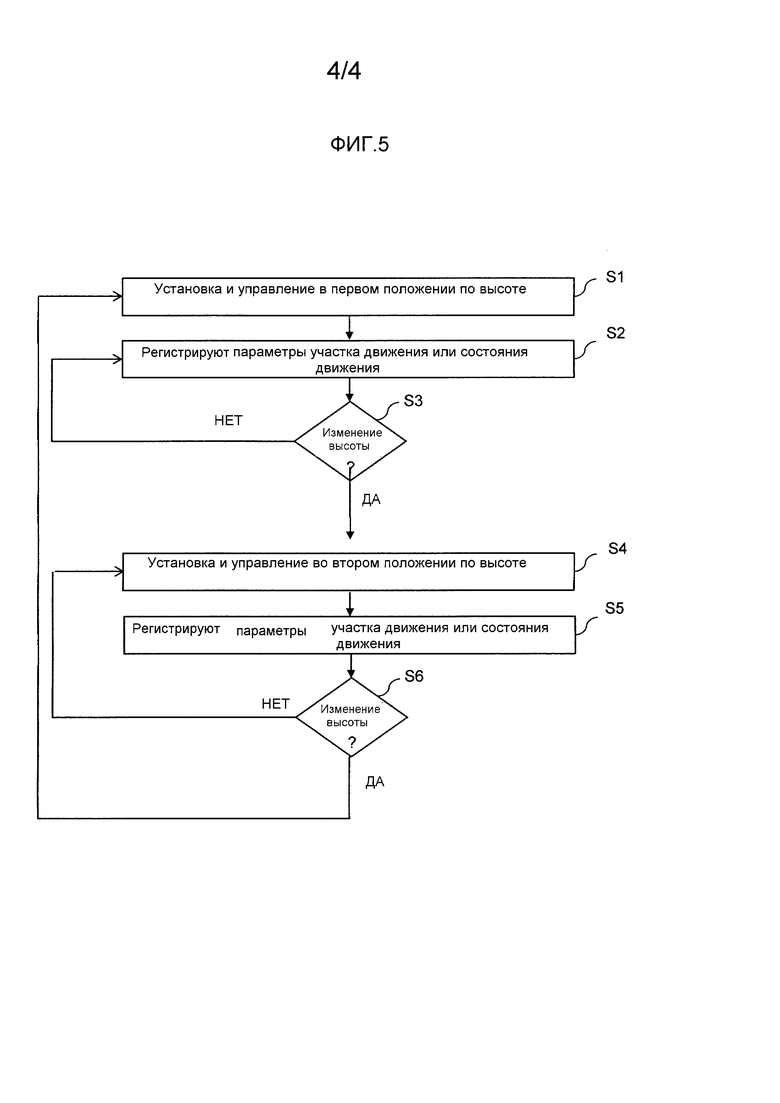
фиг. 5: изображает схему последовательности операций для иллюстрации основных этапов способа эксплуатации для регулирования уровня кабины водителя по одному из примеров осуществления.
Фиг. 1 и фиг. 2 иллюстрируют подпружиненную опору кабины 2 водителя (упрощенно изображенную в виде плоской панели) на шасси 1 автомобиля (упрощенно изображенном в виде двух параллельно расположенных профильных балок). Кабина 2 водителя пружинно установлена через четыре работающих на сжатом воздухе пружинных элемента 3 на шасси 1 с параллельной ориентацией. Пружинные элементы 3 обладают возможностью перестановки по высоте. В настоящем примере осуществления элементы 3 могут устанавливаться в двух заданных положения h1 и h2 по высоте, при этом положение h1 по высоте больше, чем положение h2 по высоте, что очевидно при сравнении фиг. 1 с фиг. 2. Измененное положение h1; h2 по высоте подпружиненной опоры изменяет (номинальное) расстояние между кабиной (2) водителя и шасси (1) и вместе с тем определенное нулевое положение, вокруг которого кабина (2) водителя может пружинить относительно шасси (2) при вертикальных толчках. Меньшее положение h2 по высоте подпружиненной опоры на фиг. 2 сокращает имеющийся в распоряжении пружинный ход. Это хотя и уменьшает комфорт амортизации, однако также уменьшает зазор или расстояние между шасси (1) и кабиной (2) водителя.
По сравнению с показанным на фиг. 1 «комфортным положением» с более высоким положением h1 по высоте пружин 3 изображенное на фиг. 2 «аэродинамическое положение», благодаря уменьшенному зазору или, соответственно, расстоянию между кабиной (2) водителя и шасси (1), обеспечивает возможность лучшего аэродинамического режима автомобиля и вместе с тем сниженного расхода топлива.
Фиг. 3 изображает схематичную блок-схему для иллюстрации одного из примеров осуществления настоящего изобретения.
Показанные на фиг. 1 пружинные элементы 3 на фиг. 3 изображены в виде четырех амортизационных стоек 3, посредством которых кабина (2; не показана) водителя пружинно установлена на шасси (1; не показано), при этом по одной амортизационной стойке 3 находится в передней левой (VL), в передней правой (VR), в задней левой (HL) и в задней правой (HR) нижней концевой области кабины (2) водителя.
Амортизационные стойки 3 могут устанавливаться в двух заданных положениях h1 и h2 по высоте. На трех из амортизационных стоек 3 установлен датчик 4 перемещений, который измеряет изменения длины или, соответственно, отклонения пружин 3 от нулевого положения. Определенные датчиками 4 перемещений данные измерений посредством сигнального провода 11 передаются в центральное устройство 7 регистрации.
Устройство 7 приема принимает по сигнальным проводам 11, кроме того, значения измерений одного или нескольких параметров 6, касающихся участка движения в данный момент и/или состояния движения автомобиля. Только в качестве примера на фиг. 3 приведены возможные сигналы, которые собираются в устройстве 7 приема. Эти сигналы включают в себя текущую скорость движения автомобиля, угол поворота руля в данный момент, данные GPS (глобальной навигационной системы), на основании которых может определяться тип дороги, данные ускорения, которые, например, регистрируются посредством сенсоров для регистрации продольного и поперечного ускорения, или данные измерений движения кабины.
Данные 6 параметров передаются в центральное устройство 5 управления, которое осуществляет аналитическую обработку принятых значений 6 параметров.
Центральное устройство 5 управления, кроме того, соединено с центральным блоком 8 клапанов через сигнальный провод 11 для управления блоком 8 клапанов. Блок 8 клапанов через напорный трубопровод 10 снабжается сжатым воздухом из устройства 9 обеспечения сжатым воздухом. Блок 8 клапанов непосредственно соединен по меньшей мере с тремя из амортизационных стоек 3 посредством трубопровода 10 сжатого воздуха, чтобы регулировать уровень сжатого воздуха в этих амортизационных стойках 3 по заданию устройства 5 управления.
Задняя правая амортизационная стойка 3 выборочно через отдельный трубопровод 10 сжатого воздуха снабжается непосредственно от блока 8 клапанов или может альтернативно также только опосредствованно настраиваться через трубопровод 10a сжатого воздуха, который снабжает как заднюю левую, так и заднюю правую амортизационную стойку 3 (проиллюстрировано трубопроводами 10a сжатого воздуха, изображенными штриховой линией). Последнее делает возможным менее точную компенсацию отклонений задней левой и задней правой амортизационной стойки от номинального состояния, однако может реализовываться с меньшими затратами и на практике приводит к достаточно хорошим результатам.
Устройство 5 управления объединяет два разных режима регулирования. При первом режиме регулирования осуществляется аналитическая обработка переданных в устройство 5 управления параметров 6, касающихся участка движения и/или состояния движения автомобиля. Устройство 5 управления определяет или сохраняет в памяти дополнительно текущее положение h1; h2 по высоте пружинных элементов 3. Значения 6 параметров, касающихся участка движения и/или состояния движения, на основании определенных согласований или пороговых значений указывают, будет ли установлено первое (h1) или второе (h2) положение по высоте упругой подвески. Если, например, скорость движения превышает некоторое определенное пороговое значение, то амортизационные стойки 3 переставляются из их первого положения h1 по высоте во второе h2 положение по высоте (сравн. соответственно фиг. 1), в случае если амортизационные стойки 3 в данный момент установлены в первое положение h1 по высоте.
Для этого центральное устройство 6 управления через сигнальный провод 11 настраивает блок 8 клапанов так, чтобы он через трубопроводы 10 сжатого воздуха устанавливал положение h1; h2 по высоте амортизационных стоек 8 в измененное положение h1; h2 по высоте. Если устройство 5 управления констатирует, что скорость движения снова упала ниже порогового значения, то устройство 5 управления управляет центральным блоком 8 клапанов таким образом, что амортизационные стойки снова возвращаются в первое положение h1 по высоте. При этом предварительно проверяется, прошло ли определенное «мертвое» время после последнего изменения высоты амортизационных стоек 3, во избежание постоянного переключения в одну и другую сторону, когда скорость движения колеблется вокруг определенного порогового значения.
Как в первом положении h1 по высоте, так и во втором положении h2 по высоте амортизационных стоек 3 затем осуществляется второй режим регулирования. В этом втором режиме регулирования устройство 5 управления контролирует по полученным выходным сигналам датчиков 4 перемещений, ориентирована ли кабина 2 водителя параллельно шасси 1 и соблюдается ли для каждого положения h1, h2 по высоте заданное номинальное расстояние.
Если, например, передняя левая амортизационная стойка 3 под весом водителя сжимается, это регистрируется датчиком 4 перемещений, который расположен на передней левой амортизационной стойке 3, путем сокращения расстояния между кабиной водителя и шасси 1. После этого устройство 5 управления путем сравнения измеренных значений датчиков 4 перемещений отдельных амортизационных стоек 3 распознает, что возникло слегка наклонное положение кабины 2 водителя относительно шасси 1. Следовательно, устройство 5 управления настраивает блок 11 клапанов так, что он через тот напорный трубопровод 10, который ведет от блока 11 клапанов к передней левой амортизационной стойке 3, корректирует высоту передней левой амортизационной стойки 3 снова на номинальное расстояние установленной в данный момент пружинной высоты.
Устройство 5 управления выполнено также так, чтобы с регулярными интервалами проверять, у всех ли амортизационных стоек 3 соблюдается заданное для текущего положения h1; h2 по высоте амортизационных стоек 2 номинальное расстояние или, соответственно, выполняются ли «нормальные» пружинные движения вокруг заданного номинального расстояния. «Нормальные» пружинные движения вокруг заданного номинального расстояния возникают при эксплуатации автомобиля непрерывно вследствие выбоин, неровностей дороги или плохих дорог и пр.
Такого рода отклонения от номинального состояния обычно уменьшаются пружинным механизмом амортизационных стоек 3 автоматически, при этом получившая толчок амортизационная стойка 3 снова качается в нулевое положение. Однако, если это не происходит у одной или нескольких амортизационных стоек 3, это регистрируется устройством 5 управления через принятые сигналы датчика 4 перемещений и, в свою очередь, компенсируется соответствующей настройкой блока 8 клапанов, который повышает или, соответственно, понижает соответствующий уровень сжатого воздуха в упомянутых амортизационных стойках 3, в зависимости от необходимости.
При этом втором «инертном» механизме регулирования не при каждом отклонении от номинального положения происходит ответное управление непосредственно путем подачи или отвода сжатого воздуха, а благодаря наличию средства 5; 13 управления становится возможным «обратный пружинный ход» и только при необходимости снова происходит корректировка на номинальное расстояние. Это позволяет более эффективно управлять сжатым воздухом. Этот второй механизм регулирования наложен на первый режим регулирования для установки пружинной высоты.
На фиг. 3 проиллюстрирован другой вариант одного из примеров осуществления, при котором, как изображено штриховыми линиями, дополнительно четвертый датчик 4a перемещений расположен на задней правой амортизационной стойке 3. Его сигналы измерений, в свою очередь, по проводу 11a передачи данных через устройство 7 приема передаются в устройство 5 управления и там подвергаются аналитической обработке.
На фиг. 4 показан другой пример осуществления, который отличается от примера осуществления, описанного на фиг. 3, по существу тем, что вместо центрального устройства 5 управления в каждом случае локальные комбинации 13, 14 регулирующих клапанов расположены на двух передних (VL, VR) амортизационных стойках 3 и одной из задних (HL) амортизационных стоек 3, благодаря чему можно обойтись без центрального блока 8 клапанов.
Комбинации 13, 14 регулирующих клапанов посредством шлангопроводов 10 снабжаются сжатым воздухом устройства 9 обеспечения сжатым воздухом. Регуляторы 13 принимают описанные выше сигналы 6, касающиеся участка движения и/или состояния движения, а также в каждом случае сигналы датчика 4 перемещений, который выполняет измерение расстояния на амортизационной стойке 3 регулятора 13.
Регуляторы 13 на основании принятых сигналов непосредственно управляют клапаном 14 на каждой амортизационной стойке 3, чтобы снабжать датчик 4 перемещений сжатым воздухом или спускать сжатый воздух из датчика 4 перемещений. Благодаря этому два различных режима регулирования, как описано выше, могут реализовываться каждым регулятором 13 в каждом случае отдельно для одной амортизационной стойки 3. Если аналитическая обработка параметров 6 отдельными регуляторами 13 показывает, что должно быть установлено другое положение h1; h2 по высоте амортизационных стоек 3, путем настройки клапанов 14 устанавливается новое положение h1; h2 по высоте амортизационных стоек 3. Это осуществляется, как правило, всеми регуляторами 13 в один и тот же момент времени, чтобы сохранить параллельную ориентацию кабины 2 водителя относительно шасси 1 при изменении расстояния. Кроме того, регулятор 13 контролирует соответствующее положению h1; h2 по высоте номинальное расстояние амортизационных стоек 3 и корректирует амортизационную стойку 3 при необходимости на заданную высоту номинального расстояния.
Задняя правая амортизационная стойка 3 выборочно (проиллюстрировано трубопроводами 10a сжатого воздуха, изображенными штриховой линией) через отдельный трубопровод 10a сжатого воздуха снабжается непосредственно от устройства 9 обеспечения сжатым воздухом или альтернативно также только опосредствованно может настраиваться через трубопровод 10a сжатого воздуха, который снабжает как заднюю левую (HL), так и заднюю правую (HR) амортизационную стойку 3. При последнем варианте регулятор 14 задней левой (HL) амортизационной стойки 3 управляет также уровнем сжатого воздуха в задней правой (HR) амортизационной стойке 3, так что можно обойтись без отдельного регулятора 14 на задней правой (HR) амортизационной стойке 3.
Фиг. 4 иллюстрирует также другой вариант одного из примеров осуществления, при котором, как проиллюстрировано штриховыми линиями, дополнительно четвертый датчик 4a перемещений расположен на задней правой (HR) амортизационной стойке 3. Его сигналы измерений, в свою очередь, по проводу 11a передачи данных передаются в регулятор 14 этой амортизационной стойки 3 и там подвергаются аналитической обработке.
Фиг. 5 иллюстрирует в качестве примера способ эксплуатации по одному из примеров осуществления. На этапе S1 подпружиненная опора между кабиной 2 водителя и шасси 1 устанавливается в первое положение по высоте. В этом первом положении h1 по высоте кабина 2 водителя находится на заданном первом номинальном расстоянии от шасси 1 автомобиля. С помощью описанного выше инертного регулирования средство 5; 13 управления с регулярными интервалами проверяет, соблюдается ли первое номинальное расстояние всеми пружинными элементами 3 с учетом нормального обратного пружинного хода, и при отклонениях отдельных пружинных элементов 3 управляет установкой снова на заданное номинальное расстояние.
Этап S2 иллюстрирует, что непрерывно регистрируются текущие значения измерений параметров 6, касающихся участка движения и/или состояния движения. На этапе S3 путем аналитической обработки значений 6 параметров проверяется, достигнуто ли заданное пороговое значение или определенное условие переключения. Если НЕТ, продолжается определение и контроль значений 6 параметров. Если ДА, это означает, что текущая пружинная высота пружинных элементов 3 должна быть изменена. Следовательно, на этапе S4 пружинная высота устанавливается на второе положение h2 по высоте, так что между кабиной 2 водителя и шасси 1 задается второе номинальное расстояние. На этапе S5, как и на этапе S2, непрерывно регистрируются текущие значения измерений параметров 6, касающихся участка движения и/или состояния движения, а на этапе S6 затем на основании значений измерений параметров 6 состояния движения и участка движения решается, должно ли сохраниться второе положение h2 по высоте пружинных элементов 3 или произойдет ли снова возврат в первое положение h1 по высоте. В этом случае цикл регулирования начинается повторно, снова с этапа S1.
Отдельные признаки изобретения, разумеется, не ограничены описанными комбинациями признаков в рамках представленных примеров осуществления. Это касается, в частности, комбинаций параметров, касающихся участка движения и/или состояния движения автомобиля промышленного назначения, которые, в зависимости от имеющейся сенсорики автомобиля, могут также применяться в разных комбинациях для определения некоторой функциональной величины, по которой можно сделать вывод, повышена или снижена ли в данный момент потребность в амортизации вследствие текущих условий движения или, соответственно, является ли особенно предпочтительным в связи с текущей ситуацией движения, например, высокой скорости, понижение пружинной высоты для снижения коэффициента cW.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Шасси автомобиля
2 Кабина водителя
3 Пружина
4, 4a Датчик перемещений
5 Устройство управления
6 Параметры, касающиеся участка движения и/или состояния движения автомобиля промышленного назначения
7 Устройство регистрации
8 Блок клапанов
9 Устройство обеспечения сжатым воздухом
10, 10a Трубопровод сжатого воздуха
11, 11a Сигнальный провод
13 Регулятор
14 Клапан
h1 Первое положение по высоте
h2 Второе положение по высоте

Группа изобретений относится к области транспортного машиностроения. Система регулирования уровня кабины автомобиля промышленного назначения относительно шасси содержит подпружиненную опору, сенсорное средство для определения расстояния между кабиной и шасси автомобиля, средство управления. Средство управления устанавливает подпружиненную опору в первое или во второе положение по высоте в зависимости от параметра, касающегося участка движения и/или состояния движения автомобиля промышленного назначения. Автомобиль промышленного назначения содержит упомянутую систему регулирования уровня кабины водителя. Способ эксплуатации для регулирования уровня кабины водителя автомобиля промышленного назначения относительно шасси автомобиля включает в себя этапы: - регистрация относительного движения и/или расстояния между кабиной водителя и шасси автомобиля; - установка подпружиненной опоры в первое или во второе положение по высоте и управление расстоянием между кабиной водителя и шасси автомобиля. Достигается улучшение демпфирования кабины водителя транспортного средства. 3 н. и 16 з.п. ф-лы, 5 ил.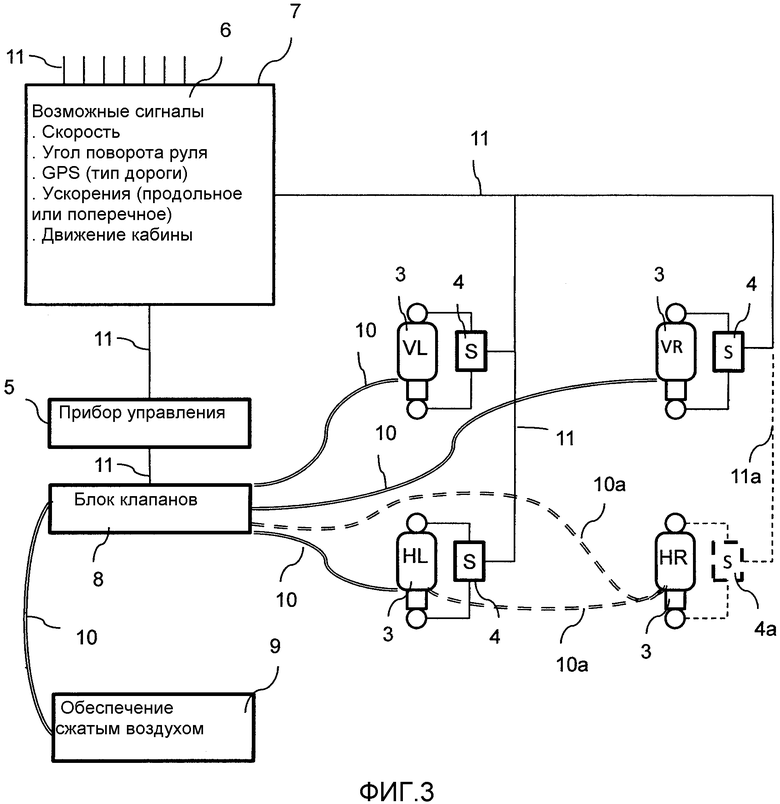
1. Система регулирования уровня кабины (2) водителя автомобиля промышленного назначения относительно шасси (1) автомобиля, включающая в себя подпружиненную опору для пружинного опирания кабины (2) водителя на шасси (1) автомобиля, сенсорное средство для определения расстояния, которое выполнено, чтобы регистрировать относительные движения и/или расстояние между кабиной (2) водителя и шасси (1) автомобиля, средство (5; 13) управления, которое выполнено для изменяемой настройки подпружиненной опоры, при этом для настройки подпружиненной опоры используются сигналы сенсорного средства для определения расстояния, при этом подпружиненная опора может устанавливаться в первое положение (h1) по высоте так, что средство (5; 13) управления управляет расстоянием между кабиной (2) водителя и шасси (1) автомобиля, устанавливая его на первое номинальное расстояние, отличающаяся тем, что подпружиненная опора может устанавливаться по меньшей мере в одно второе положение (h2) по высоте так, что средство (5; 13) управления управляет расстоянием между кабиной (2) водителя и шасси (1) автомобиля, устанавливая его на второе номинальное расстояние, при этом средство (5; 13) управления устанавливает подпружиненную опору в первое (h1) или по меньшей мере в одно второе положение (h2) по высоте в зависимости от по меньшей мере одного параметра (6), касающегося участка движения и/или состояния движения автомобиля промышленного назначения.
2. Система по п.1, отличающаяся тем, что указанный по меньшей мере один параметр (6), касающийся состояния движения автомобиля промышленного назначения, включает в себя по меньшей мере одну скорость движения.
3. Система по п.2, отличающаяся тем, что средство (5; 13) управления выполнено, чтобы регулировать расстояние между кабиной (2) водителя и шасси (1) автомобиля после превышения некоторого определенного порогового значения скорости движения, устанавливая его на второе номинальное расстояние таким образом, чтобы второе номинальное расстояние было меньше, чем первое номинальное расстояние, и пружинный ход подпружиненной опоры во втором положении (h2) по высоте был меньше, чем пружинный ход в первом положении (h1) по высоте.
4. Система по п.1, отличающаяся тем, что указанный по меньшей мере один параметр (6), касающийся состояния движения автомобиля промышленного назначения, включает в себя действия водителя при управлении, поперечное ускорение, продольное ускорение автомобиля промышленного назначения и/или движение кабины (2) водителя.
5. Система по п.2, отличающаяся тем, что указанный по меньшей мере один параметр (6), касающийся состояния движения автомобиля промышленного назначения, включает в себя действия водителя при управлении, поперечное ускорение, продольное ускорение автомобиля промышленного назначения и/или движение кабины (2) водителя.
6. Система по п.3, отличающаяся тем, что указанный по меньшей мере один параметр (6), касающийся состояния движения автомобиля промышленного назначения, включает в себя действия водителя при управлении, поперечное ускорение, продольное ускорение автомобиля промышленного назначения и/или движение кабины (2) водителя.
7. Система по п.1, отличающаяся тем, что указанный по меньшей мере один параметр (6), касающийся участка движения, включает в себя тип дороги.
8. Система по п.2, отличающаяся тем, что указанный по меньшей мере один параметр (6), касающийся участка движения, включает в себя тип дороги.
9. Система по п.3, отличающаяся тем, что указанный по меньшей мере один параметр (6), касающийся участка движения, включает в себя тип дороги.
10. Система по п.4, отличающаяся тем, что указанный по меньшей мере один параметр (6), касающийся участка движения, включает в себя тип дороги.
11. Система по п.5, отличающаяся тем, что указанный по меньшей мере один параметр (6), касающийся участка движения, включает в себя тип дороги.
12. Система по п.6, отличающаяся тем, что указанный по меньшей мере один параметр (6), касающийся участка движения, включает в себя тип дороги.
13. Система по одному из пп.1-12, отличающаяся тем, что первое номинальное расстояние первого положения (h1) по высоте больше, чем второе номинальное расстояние второго положения (h2) по высоте, и пружинный ход подпружиненной опоры в первом положении (h1) по высоте больше, чем пружинный ход во втором положении (h2) по высоте.
14. Система по одному из пп.1-12, отличающаяся тем, что подпружиненная опора включает в себя: несколько пневматических и/или гидравлических пружинных элементов (3), центральный блок (8) клапанов для изменяемого снабжения пружинных элементов (3) средой, создающей давление, и устройство (9) обеспечения, которое обеспечивает блок (8) клапанов средой, создающей давление; при этом средство управления выполнено в виде центрального устройства (5) управления и выполнено, чтобы регулировать уровень давления одного из пружинных элементов (3), который не сокращается до установленного номинального расстояния, через центральный блок (8) клапанов таким образом, чтобы этот пружинный элемент (3) сокращался до установленного номинального расстояния.
15. Система по одному из пп.1-12, отличающаяся тем, что подпружиненная опора включает в себя: несколько пневматических и/или гидравлических пружинных элементов (3), снабженных каждый клапаном (14) для изменяемого снабжения пружинных элементов (3) средой, создающей давление, и устройство (9) обеспечения, которое обеспечивает пружинные элементы средой, создающей давление; при этом средство управления выполнено в виде децентрализованного средства управления, имеющего расположенные на клапанах регуляторы (13), причем в случае, если один из пружинных элементов (3) не сокращается до установленного номинального расстояния, регулятор (13) этого пружинного элемента (3) через расположенный на регуляторе (13) клапан (14) управляет уровнем рабочей среды пружинного элемента (3) так, что этот пружинный элемент (3) снова сокращается до установленного номинального расстояния.
16. Система по одному из пп.1-12, отличающаяся тем, что сенсорное средство для определения расстояния включает в себя три датчика (4) перемещений, а подпружиненная опора - четыре работающих на сжатом воздухе амортизационные стойки (3), при этом каждый из трех датчиков (4) перемещений расположен на одной из трех амортизационных стоек (3) для измерения расстояния.
17. Система по одному из пп.3-12, отличающаяся тем, что средство (5; 13) управления выполнено, чтобы регулировать расстояние между кабиной (2) водителя и шасси (1) автомобиля после опускания ниже определенного порогового значения скорости движения, возвращая его на первое номинальное расстояние, при этом управление с возвратом на первое номинальное расстояние происходит только тогда, когда после предшествующего превышения порогового значения или регулирования с установкой на второе номинальное расстояние прошло некоторое определенное «мертвое» время.
18. Автомобиль промышленного назначения, включающий в себя систему по одному из предыдущих пунктов.
19. Способ эксплуатации для регулирования уровня кабины (2) водителя автомобиля промышленного назначения относительно шасси (1) автомобиля, включающий в себя этапы: регистрация относительного движения и/или расстояния между кабиной (2) водителя и шасси (1) автомобиля; установка подпружиненной опоры, которая пружинно опирает кабину (2) водителя на шасси (1) автомобиля, в первое положение (h1) по высоте и управление расстоянием между кабиной (2) водителя и шасси (1) автомобиля с установкой его на по меньшей мере одно первое номинальное расстояние, при этом зарегистрированное относительное движение и/или расстояние между кабиной (2) водителя и шасси (1) автомобиля используют для управления с установкой на первое номинальное расстояние; установка подпружиненной опоры по меньшей мере в одно второе положение (h2) по высоте и регулирование расстояния между кабиной (2) водителя и шасси (1) автомобиля с установкой его по меньшей мере на одно второе номинальное расстояние, при этом зарегистрированное относительное движение и/или расстояние между кабиной (2) водителя и шасси (1) автомобиля используется для управления с установкой на второе номинальное расстояние; при этом установка подпружиненной опоры в первое (h1) или в указанное по меньшей мере одно второе положение (h2) по высоте осуществляется в зависимости от по меньшей мере одного параметра (6), касающегося участка движения и/или состояния движения автомобиля промышленного назначения.
| Способ химического оксидирования алюминиевой пудры | 1956 |
|
SU109085A1 |
| СИСТЕМА ПОДВЕСКИ КАБИНЫ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2415045C2 |
| WO 2009136005 A1, 12.11.2009 | |||
| Устройство для определения синхронизации физиологических процессов | 1989 |
|
SU1661796A1 |

