Изобретение касается способа и устройства для осуществления управления без обратной связи или с обратной связью креплением кабины водителя автомобиля, в частности автомобиля общего назначения, который может эксплуатироваться в автономном и/или частично-автономном режиме вождения.
При расчете систем регулирования ходовой части всегда необходим компромисс между комфортом и безопасностью вождения. Идеальная ходовая часть должна как можно лучше амортизировать колебания, возбуждаемые неровностями дорожного полотна, и одновременно по возможности можно постоянно поддерживать на заданном значении силы опоры колес, потому что благодаря этому колеса обладают максимальным потенциалом продольного и бокового ведения и ведут транспортное средство с оптимальной надежностью.
Имеющиеся в настоящее время амортизаторные системы в транспортных средствах могут быть разделены на три группы: пассивные, полуактивные и активные амортизаторные системы. У пассивных амортизаторных систем размер и направление создаваемой амортизатором силы, как правило, зависят только от относительной скорости амортизатора. Однако известны также амортизаторы, зависящие от положения, напр., т.н. амортизаторы с пазом. В пассивных амортизаторных системах изменение характеристики силы амортизации в режиме вождения не предусмотрено. Согласование компонентов ходовой части транспортного средства, имеющего пассивные амортизаторы ударов, всегда представляет собой только компромисс, так как различные состояния вождения должны покрываться одной и той же установкой ходовой части.
Решение этого конфликта целей заключается в применении полуактивных ударных амортизаторов, которые позволяют изменять характеристики амортизации в широких пределах путем электронной настройки и таким образом в течение нескольких миллисекунд предоставлять оптимальную установку амортизатора для различных ситуаций вождения. Но и для различных состояний загрузки, которые, в частности, могут создавать в автомобиле общего назначения большие различия в отношении общей массы и положения центра тяжести, могут выбираться надлежащие предварительные установки амортизаторов, которые обладают превосходством перед одним единственным согласованием пассивных амортизаторов.
У полуактивных амортизаторных систем их характеристика во время движения может изменяться быстро и в широких пределах. В частности, такие ударные амортизаторы могут основываться на (пропорциональных) регулировочных клапанах, которые изменяют поток масла, или на магнито- или электрореологических жидкостях, при этом магнитное или электрическое поле влияет на вязкость жидкости и вместе с тем на силу амортизации. Из практики известны также комбинации этих технологий. Таким образом разные регулировочные программы посредством одного исполнительного элемента в могут устанавливать оптимальную силу амортизации зависимости от текущей ситуации вождения.
У активных амортизаторных систем посредством актуатора создается желаемая сила в любом направлении, независимо от относительной скорости амортизатора.
Вышеназванные амортизаторные системы известны не только для крепления ходовой части, но и для амортизирующего крепления кабины водителя (называемой также кабиной управления). Родственные крепления кабины водителя, т.е. устройства подвески для подрессоривающей/амортизирующей подвески кабины управления автомобиля относительно шасси транспортного средства, находят применение, например, однако никоим образом не исключительно, у грузовых автомобилей, сельскохозяйственных транспортных средств или транспортных средств большой грузоподъемности. Примерные крепления кабины водителя известны, например, из выкладных описаний изобретений DE 10 2008 063 475 A1 или DE 10 2012 200 670 A1.
В то время как в ходовой части посредством полуактивных или активных элементов можно влиять как на комфорт вождения, в смысле уменьшения колебаний кузова, так и на безопасность вождения, в смысле равномерных сил опоры колес, в области крепления кабины водителя может осуществляться влияние только на колебания кабины водителя и вместе с тем на комфорт. Но благодаря непосредственному действию это влияние больше, чем влияние амортизации ходовой части.
Вследствие подрессоривающего крепления кабины водителя на раме шасси при торможении или, соответственно, при ускорении транспортного средства возникает нежелательное движение по тангажу в или, соответственно, против направления движения. Кроме того, при езде на поворотах возникают неблагоприятные движения по крену кабины водителя в направлении наружу поворота. Причина видится в относительно высоком центре тяжести кабины водителя на раме шасси. Такие непреднамеренные степени свободы движения, как движения по тангажу или крену, могут целенаправленно и эффективно амортизироваться посредством регулируемых, напр., полуактивных амортизаторов. В частности, вследствие сравнительно малой длины и связанной с этим короткой опорной базой, кабины водителя реагируют на продольные ускорения заметными движениями по тангажу.
Из практики известны крепления кабины водителя автомобилей общего назначения, амортизация которых может адаптироваться к различным ситуациям вождения. Так, например, известна установка силы амортизации регулируемых амортизаторов крепления кабины водителя в целях комфорта на мягкую амортизацию, которая, однако повышение силы амортизации при динамических процессах, таких как смена полосы движения, процессы торможения или переключения.
Из уровня техники известны также автомобили, которые могут эксплуатироваться в автономном или частично-автономном режиме вождения, в котором автомобиль посредством системы помощи водителю автоматически выполняет ведение транспортного средства, включающее в себя как операцию продольного ведения, так и операцию поперечного ведения автомобиля.
Из выкладного описания изобретения DE 10 2013 019 141 A1 известен, например, способ эксплуатации системы помощи водителю автомобиля, причем эта система помощи водителю в автономном режиме вождения автоматически выполняет ведение транспортного средства, включающее в себя как операцию продольного ведения, так и операцию поперечного ведения автомобиля, и при этом принимает сигнал перехода, который предназначен для того, чтобы инициировать в этой системе помощи водителю переход из автономного режима вождения в предопределенный другой режим вождения, в котором по определению водитель автомобиля выполняет по меньшей мере часть ведения транспортного средства.
Из выкладного описания изобретения DE 10 2015 214 025 A1 известен, например, способ эксплуатации автомобиля, который эксплуатируется в автономном режиме вождения, причем после включения этого автономного режима вождения устанавливается стратегия вождения автомобиля, уменьшающая расход и/или уменьшающая износ.
Из выкладного описания изобретения DE 10 2009 010 006 A1 известен также способ частично-автономного или автономного вождения автомобиля посредством системы помощи водителю. При этом посредством сенсорики окружающего фона определяются данные окружающего фона автомобиля. Затем по этим данным окружающего фона определяется стратегия вождения для частично автономного или автономного вождения, при этом система помощи водителю берет на себя эти функции вождения водителя транспортного средства, в случае если констатируется, что водитель хочет передать эти функции вождения системе помощи водителю, при этом вмешательство водителя в происходящее вождение во время частично-автономного или автономного вождения перерегулирует систему помощи водителю.
Принимая во внимание возрастающее значение автономно эксплуатируемых транспортных средств, задачей изобретения является усовершенствовать известные способы и устройства с целью адаптации силы амортизации регулируемых амортизаторов крепления кабины водителя автомобиля с учетом применения в транспортном средстве, которое может как активно управляться водителем, так и эксплуатироваться в автономном и/или частично-автономном режиме вождения.
Эти задачи решаются с помощью устройств и способов с признаками независимых пунктов формулы изобретения. Предпочтительные варианты осуществления и применения изобретения следуют из зависимых пунктов формулы изобретения и поясняются подробнее в последующем описании с частичной ссылкой на фигуры.
В соответствии с изобретением предоставляется способ осуществления управления с обратной связью или без обратной связи креплением кабины водителя, причем это крепление кабины водителя имеет амортизаторы, регулируемые по своей силе амортизации. Крепление кабины водителя может, в частности, иметь устройство подвески для амортизирующей и предпочтительно также подрессоривающей подвески кабины водителя (кабины управления) автомобиля относительно шасси транспортного средства. Шасси транспортного средства может представлять собой раму транспортного средства или, соответственно, лестничную раму.
При этом автомобиль может эксплуатироваться в автономном или частично-автономном первом режиме вождения, в котором автомобиль посредством системы помощи водителю автоматически выполняет ведение транспортного средства, включающее в себя как операцию продольного ведения, так и операцию поперечного ведения автомобиля. В первом режиме вождения система помощи водителю для автономного вождения берет на себя функции вождения, необходимые для продольного ведения и поперечного ведения автомобиля, напр., рулевое управление, ускорение, торможение или при необходимости выбор передачи, т.е. система помощи водителю выполнена для автоматического вождения путем вмешательства в управление двигателем, в коробку передач и тормозную систему автомобиля общего назначения. Такие системы помощи водителю собственно известны из уровня техники и поэтому здесь подробнее не описаны.
Далее, автомобиль может эксплуатироваться во втором режиме вождения так, что он может управляться водителем, в этом режиме вождения водитель автомобиля должен сам выполнять по меньшей мере часть ведения транспортного средства. В первом режиме вождения транспортное средство едет, таким образом, (частично-)автономно, а во втором режиме вождения водитель активно ведет транспортное средство.
Автомобиль может, в частности, представлять собой автомобиль общего назначения, напр., грузовой автомобиль (грузовик). Регулируемые амортизаторы могут быть выполнены в виде полуактивных или активных амортизаторов. Регулируемые амортизаторы могут быть также выполнены в виде регулируемых рессорно-амортизаторных устройств. При этом амортизирующие и подрессоривающие элементы могут быть выполнены, будучи конструктивно отделены друг от друга, или в виде комбинированных рессорно-амортизаторных элементов, напр., регулируемая пневматическая рессора, имеющая интегрированный амортизатор.
По общему аспекту изобретения названные задачи решаются таким образом, что, в случае если автомобиль эксплуатируется в первом режиме вождения, регулируемые амортизаторы крепления кабины водителя приводятся в действие или регулируются так, чтобы движения по тангажу и/или крену были уменьшены по сравнению со вторым режимом вождения. Таким образом, если бы транспортное средство дважды поочередно проезжало один и тот же участок движения с одинаковыми характеристиками скорости и ускорения, и причем один раз в (частично-)автономном первом режиме вождения и один раз в активном втором режиме вождения, то движения по тангажу и/или крену при проезде этого участка пути в первом режиме вождения были бы меньше, чем при проезде во втором режиме вождения.
По первому аспекту изобретения предоставляется, таким образом, способ адаптации силы амортизации регулируемых амортизаторов крепления кабины водителя автомобиля, причем этот автомобиль может эксплуатироваться в автономном или частично автономном первом режиме вождения, в котором автомобиль посредством системы помощи водителю автоматически выполняет ведение транспортного средства, включающее в себя как операцию продольного ведения, так и операцию поперечного ведения автомобиля, и во втором режиме вождения автомобиль может эксплуатироваться так, что он может управляться водителем, в этом втором режиме вождения водитель автомобиля должен сам выполнять по меньшей мере часть ведения транспортного средства. Способ отличается тем, что, в случае если автомобиль эксплуатируется в первом режиме вождения, регулируемые амортизаторами крепления кабины водителя приводятся в действие или регулируются так, что движения по тангажу и/или крену уменьшаются по сравнению со вторым режимом вождения.
Способы управления с обратной связью и без обратной связи для уменьшения и/или компенсации движений по крену и движений по тангажу собственно известны из уровня техники и здесь не требуют более подробного описания. Решающим является, что в соответствии с изобретением управление с обратной связью или без обратной связи регулируемыми амортизаторами в первом режиме вождения выполняется так, что движения по тангажу и/или крену подавляются сильнее, чем во втором режиме вождения.
Таким образом, для ситуаций частично-автономного или автономного вождения реализуется наиболее комфортабельная возможная амортизация крепления кабины водителя, которая в значительной степени избавляет водителя от влияния движений при езде. Благодаря этому должен, например, достигаться комфорт, который известен по современным поездам. Параллельные виды деятельности водителя, которые он выполняет в первом режиме вождения, например, чтение, офисная работа и пр., становятся возможными с уменьшенной минимальной стимуляцией извне и по возможности неутомительным образом.
По одному из особенно предпочтительных вариантов осуществления, в случае если автомобиль эксплуатируется в первом режиме вождения, продольное ускорение, воспринимаемое человеком в кабине водителя при продольном ускорении транспортного средства, по меньшей мере частично уменьшается благодаря тому, что при продольном ускорении транспортного средства кабина водителя наклоняется вперед посредством крепления кабины водителя, напр., посредством амортизаторов и/или посредством рессорных элементов крепления кабины водителя, , а при продольном замедлении наклоняется назад. При этом варианте осуществления крепление кабины водителя имеет активные амортизаторы, высота выдвигания которых может устанавливаться, и/или регулируемые по высоте рессорные элементы.
Под наклоном вперед понимается качательное движение кабины водителя, при котором передняя, если смотреть в направлении движения, сторона кабины водителя качается вниз по сравнению с задней стороной кабины водителя, так что передний конец кабины водителя при продольном ускорении находится ниже, чем задний конец кабины водителя. Под наклоном назад понимается обратное качательное движение, при котором задняя, если смотреть в направлении движения, сторона кабины водителя качнулась вниз по сравнению с передней стороной кабины водителя.
Этот принцип известен также как так называемый «Motion Cueing» (англ. восприятие признаков движения) из области имитаторов движения, для влияния на ускорение, воспринимаемое испытуемым.
Этот вариант осуществления дает то особое преимущество, что комфорт для водителя во время эксплуатации транспортного средства в первом режиме вождения еще больше повышается, так как воспринимаемые продольные ускорения, которые выполняет транспортное средство, могут значительное уменьшаться.
Возможность реализации изобретения предусматривает также, что, в случае если автомобиль эксплуатируется в первом режиме вождения, поперечное ускорение, воспринимаемое человеком в кабине водителя при поперечном ускорении транспортного средства, по меньшей мере частично уменьшается благодаря тому, что при поперечном ускорении транспортного средства кабина водителя наклоняется в сторону посредством крепления кабины водителя. Например, при поперечном ускорении в направлении движения вправо правая сторона кабины водителя может наклоняться вниз по сравнению с левой стороной. Также при поперечном ускорении в направлении движения влево правая сторона кабины водителя может наклоняться вверх по сравнению с левой стороной. При этом варианте осуществления крепление кабины водителя имеет активные амортизаторы и/или регулируемые по высоте рессорные элементы. Таким образом, этот вариант осуществления дает то преимущество, что поперечные ускорения или, соответственно, боковые ускорения больше не воспринимается человеком в кабине водителя или по меньшей мере воспринимаются только лишь в меньшей степени, что дополнительно повышает комфорт в кабине водителя.
Другая возможность реализации изобретения предусматривает также, что, в случае если автомобиль эксплуатируется в первом режиме вождения, создаваемый при движении на подъем наклон кабины водителя автомобиля назад по меньшей мере частично уменьшается благодаря тому, что кабина водителя наклоняется вперед посредством крепления кабины водителя. Другими словами, создаваемый уклоном дорожного полотна наклон кабины водителя назад компенсируется соответствующим противоположным наклоном, причем этот противоположный наклон создается креплением кабины водителя, напр., путем соответствующей регулировки высоты рессорно-амортизаторных элементов крепления кабины водителя. Для этого могут, например, выдвигаться задние амортизаторные и/или рессорные элементы и/или вдвигаться передние амортизаторные и/или рессорные элементы крепления кабины водителя.
Аналогично, в случае если автомобиль эксплуатируется в первом режиме вождения, создаваемый при движении на спуск наклон автомобиля вперед может по меньшей мере частично уменьшаться благодаря тому, что кабина водителя наклоняется назад посредством крепления кабины водителя.
По другому предпочтительному варианту осуществления регулирование силы амортизации регулируемых амортизаторов крепления кабины водителя осуществляется способом «Skyhook» (англ. небесный крюк), в то время как регулирование силы амортизации регулируемого амортизатора крепления ходовой части автомобиля осуществляется способом «Groundhook» (англ. земляной крюк). Способ «Skyhook» и способ «Groundhook» хорошо известны из уровня техники как регулирующие алгоритмы для регулирования регулируемых амортизаторов и здесь не требуют более подробного описания. Применение способа «Skyhook» для крепления кабины водителя при одновременном применении способа «Groundhook» для крепления ходовой части дает особенно хорошее сочетание комфорта для крепления кабины водителя при одновременном ориентированном на безопасность регулировании ходовой части.
По второму аспекту изобретения предоставляется также устройство управления для адаптации силы амортизации регулируемых амортизаторов крепления кабины водителя автомобиля, в частности автомобиля общего назначения. Причем это устройство управления выполнено для выполнения способа, который описан выше.
В частности, устройство управления выполнено с возможностью обнаруживать, эксплуатируется ли автомобиль в автономном или частично автономном первом режиме вождения, в котором автомобиль посредством системы помощи водителю автоматически выполняет ведение транспортного средства, включающее в себя как операцию продольного ведения, так и операцию поперечного ведения автомобиля, или эксплуатируется во втором режиме вождения, в котором водитель автомобиля сам выполняет по меньшей мере часть ведения транспортного средства. Устройство управления выполнено также, чтобы приводить в действие или регулировать регулируемые амортизаторы крепления кабины водителя так, чтобы движения по тангажу и/или крену уменьшались по сравнению со вторым режимом вождения, в случае если автомобиль эксплуатируется в первом режиме вождения.
Во избежание повторов признаки, раскрытые чисто в связи со способом, должны считаться также раскрытыми в связи с устройством и являться предметом заявки, и наоборот. Вышеназванные аспекты и признаки изобретения, в частности применительно к наклону кабины водителя с целью уменьшения воспринимаемых продольных и/или поперечных ускорений в кабине водителя, относятся при этом также к устройству управления.
Изобретение касается также автомобиля, в частности автомобиля общего назначения, имеющего такое устройство управления. Автомобиль включает в себя также кабину водителя и крепление кабины водителя, имеющее регулируемые амортизаторы. Автомобиль включает в себя также систему помощи водителю, посредством которой автомобиль может эксплуатироваться в автономном или частично-автономном первом режиме вождения, в котором автомобиль посредством системы помощи водителю автоматически выполняет ведение транспортного средства, включающее в себя как операцию продольного ведения, так и операцию поперечного ведения автомобиля. Автомобиль может также эксплуатироваться во втором режиме вождения так, что может управляться самим водителем , в этом режиме вождения водитель автомобиля должен сам активно выполнять по меньшей мере часть ведения транспортного средства.
Описанные выше предпочтительные варианты осуществления и признаки изобретения могут комбинироваться друг с другом любым образом. Другие подробности и преимущества изобретения описываются ниже со ссылкой на прилагаемые чертежи. Показано:
фиг.1: схематичная блок-схема для иллюстрации известного способа регулирования регулируемых амортизаторов крепления кабины водителя;
фиг.2: схематичная блок-схема для иллюстрации одного из способов адаптации силы амортизации регулируемых амортизаторов крепления кабины водителя по одному из примеров осуществления изобретения;
фиг.3: схематичная блок-схема для иллюстрации одного из способов адаптации силы амортизации регулируемых амортизаторов крепления кабины водителя по одному из примеров осуществления изобретения; и
фиг.4A-C: компенсирующие движения кабины водителя по другому примеру осуществления изобретения.
Одинаковые или функционально эквивалентные элементы на всех фигурах обозначены одними и теми же ссылочными обозначениями и в отдельных случаях особо не описываются.
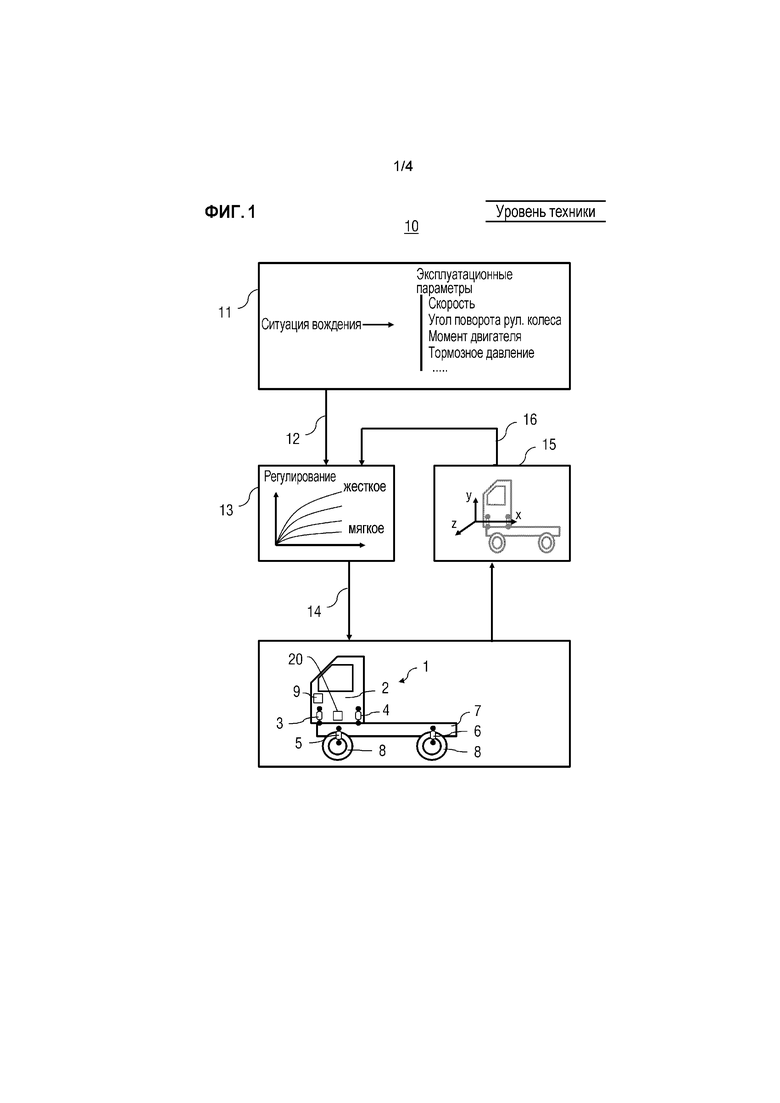
На фиг.1 показана схематичная блок-схема 10 для иллюстрации собственно известного способа регулирования для регулирования силы амортизации регулируемых амортизаторов крепления кабины водителя автомобиля общего назначения. На фиг.1 на нижнем рисунке в сильно схематизированном изображении показан автомобиль 1 общего назначения. Рама 7 транспортного средства посредством собственного крепления (крепление ходовой части) подрессоренным и амортизированным образом соединена с колесами 8 транспортного средства, причем здесь, в свою очередь, находят применение несколько рессорно-амортизаторных элементов 5, 6.
Так как у таких транспортных средств, вследствие значительных весов транспортного средства, а также вследствие высоких неподрессоренных масс в ходовой части, должны выбираться сравнительно высокие степени подрессоривания или, соответственно, амортизации рессорно-амортизаторных элементов 5, 6 ходовой части, неровности дорожного полотна или же колебания от осей и трансмиссии сначала еще в значительной части передаются через подрессоривание оси на раму 7 транспортного средства. По этой причине требуется еще раз, отдельно от шасси 7 транспортного средства, изолировать кабину 2 водителя посредством собственного надлежащего крепления кабины водителя. Поэтому кабина 2 водителя оперта на раму 7 транспортного средства посредством крепления кабины водителя. Крепление кабины водителя включает в себя для этого несколько регулируемых рессорно-амортизаторных узлов 3, 4, сила амортизации которых может устанавливаться посредством устройства 20 управления. Рессорно-амортизаторные узлы 3, 4 крепления кабины водителя могут представлять собой только в качестве примера регулируемые по давлению пневматические рессоры.
Итак, блок-схема 10 фиг.1 иллюстрирует известное регулирование амортизации кабины водителя, которое решает конфликт целей между комфортом и устойчивостью, и которое, в частности, находит применение для движения во втором режиме вождения. При активном движении должна осуществляться стратегия эксплуатации, которая предоставляет высокий комфорт подрессоривания и амортизации, одновременно кабина водителя должна быть хорошо присоединена при реакциях на изменение нагрузки и динамических состояниях движения (таких как, напр., разгон, торможение, ускорение или езда на повороте). Также реализуется компенсация кивания при процессах разгона, переключения и торможения.
Для этого непрерывно в шаге 11 на основе разных эксплуатационных параметров выясняется ситуация вождения в данный момент. Примерами надлежащих эксплуатационных параметров являются скорость движения автомобиля общего назначения, угол поворота рулевого колеса, момент двигателя, тормозное давление и пр. Эти эксплуатационные параметры могут находиться посредством сенсорики транспортного средства. Текущие значения этих эксплуатационных параметров в шаге 12 непрерывно передаются в устройство 20 управления, в котором заложены разные регулировочные характеристики 13. Устройство 20 управления по эксплуатационным параметрам распознает определенную ситуацию вождения и соответственно этому выбирает заранее присвоенную этой ситуации вождения характеристику, которая затем берется за основу для крепления кабины водителя.
При этом при нормальной эксплуатации транспортного средства кабина 2 водителя регулируется на высокий комфорт, т.е. выбирается характеристика, которая способствует как можно более мягкой амортизации кабины 2 водителя. Если распознается ситуация вождения, которая соответствует высокодинамичному маневру движения, напр., разгону, торможению, езде на повороте и пр., напротив, выбирается более жесткая характеристика.
Затем в зависимости от каждой текущей выбранной характеристики устройство 20 управления регулирует силу амортизации регулируемых амортизаторов 3, 4, что изображено шагом 14. Как часть контура регулирования, непрерывно контролируются реакции кабины 2 водителя, например, ее движение в направлении x, y и z, что схематично изображено шагом 15. Эти отклонения в качестве регулирующей величины возвращаются в устройство 20 управления, которое затем, в зависимости от значения этой регулирующей величины, находит соответственно адаптированные управляющие величины для контура регулирования.
Таким образом, контур регулирования выполнен так, что в целях комфорта, как правило, пытаются реализовать как можно более мягкую амортизацию кабины водителя, но при этом при динамических процессах, таких как смена полосы движения, процессы торможения или переключения, сила амортизации временно увеличивается.
На фиг.2 показана теперь схематичная блок-схема способа адаптации силы амортизации регулируемых амортизаторов крепления кабины водителя автомобиля по одному из вариантов осуществления изобретения.
При этом автомобиль 1 общего назначения может эксплуатироваться, в частности, в автономном или частично-автономном режиме вождения, в котором автомобиль 1 общего назначения посредством системы 9 помощи водителю автоматически выполняет ведение транспортного средства, включающее в себя как операцию продольного ведения, так и операцию поперечного ведения автомобиля 1 общего назначения. Однако автомобиль 1 общего назначения может также эксплуатироваться во втором режиме вождения так, что может управляться водителем, , в этом режиме вождения водитель автомобиля 1 общего назначения должен сам выполнять по меньшей мере часть ведения транспортного средства. То есть водитель может сам решать, даст ли он автомобилю общего назначения ехать автономно, напр., пилотируемым образом, или он хотел бы сам активно управлять им.
В (частично-)автономном режиме вождения нет необходимости в беспрестанном контроле водителем ведения транспортного средства, так что он может посвятить себя другим видам деятельности, таким как, напр., чтение или работа. Чтобы водитель мог выполнять эти параллельные виды деятельности с наименьшей возможной стимуляцией извне и по возможности не утомляясь, регулируемые амортизаторы 3, 4 крепления кабины водителя приводятся в действие или регулируются так, что движения по тангажу и/или крену в первом режиме вождения уменьшаются по сравнению со вторым режимом вождения. Для этого в шаге S1 непрерывно контролируется текущий режим вождения транспортного средства.
Если при этом констатируется (шаг S2), что транспортное средство в данный момент находится не в автономном режиме вождения, а во втором режиме вождения, при котором водитель сам активно управляет автомобилем общего назначения, в шаге S4 выполняется собственно известное регулирование крепления кабины водителя, например, регулирование, которое было описано выше в связи с фиг.1.
Однако если в шаге S2 констатируется, что автомобиль 1 общего назначения в данный момент эксплуатируется в (частично-)автономном режиме вождения, управление с обратной связью или без обратной связи регулируемыми амортизаторами 3, 4 крепления кабины водителя в шаге S3 адаптируется так, что движения по тангажу и/или крену кабины 2 водителя уменьшаются по сравнению со вторым режимом движения. Благодаря этому производится как можно более комфортабельная амортизация крепления кабины водителя, которая в значительной избавляет водителя от влияния движений при езде. При этом могут применяться известные методы уменьшения движений по тангажу и/или крену, причем, однако, в частично-автономном или автономном режиме вождения движении по тангажу и/или крену компенсируются или, соответственно, уменьшаются сильнее, чем при активном режиме вождения. Для уменьшения движений по тангажу и/или крену может, например, устанавливаться временно более жесткая установка амортизатора. В то время как водитель в активном режиме вождения получает от транспортного средства соответствующие обратные сигналы в ответ на желания рулевого управления, торможения или ускорения, которые подаются ожидаемым образом и при этом способствуют безопасности вождения, в (частично-)автономном режиме водитель должен в значительной степени освобождаться от движений транспортного средства, так как он не влияет на происходящую езду.
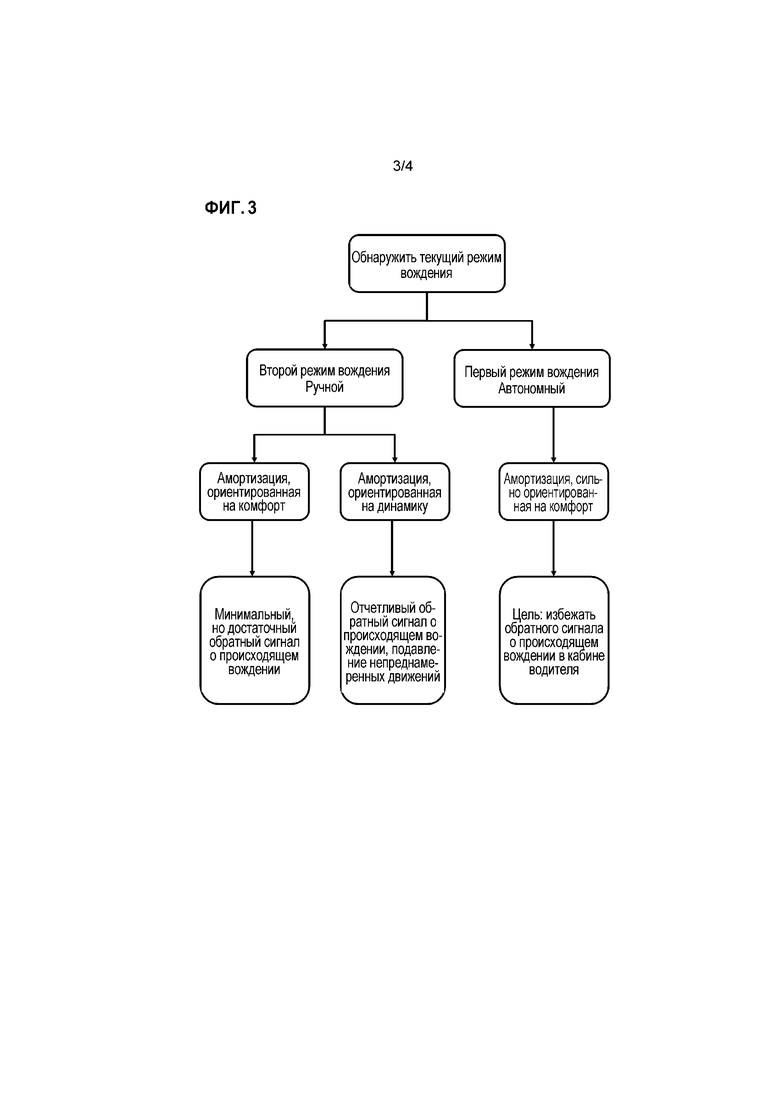
На фиг.3 показана схематичная блок-схема реализации способа адаптации силы амортизации регулируемых амортизаторов по другому варианту осуществления изобретения, который совершенствует собственно известный из фиг.1 способ регулирования, для случая, когда водитель переключается в первый режим вождения, в котором транспортное средство эксплуатируется (частично-)автономно.
При этом в свою очередь, сначала обнаруживается действующий текущий режим вождения, т.е. определяется, находится ли автомобиль 1 общего назначения в первом режиме вождения, при котором автомобиль общего назначения эксплуатируется автономно или по меньшей мере полуавтономно, или автомобиль общего назначения находится во втором режиме вождения, в котором управление им осуществляется водителем вручную.
Однако если автомобиль общего назначения находится во втором режиме вождения, при котором управление автомобилем общего назначения активно осуществляется водителем, выполняется регулирование крепления кабины водителя в соответствии со способом регулирования фиг.1. При этом для нормальных состояний вождения выбирается амортизация, по возможности ориентированная на комфорт, чтобы обеспечить возможность минимального, но по меньшей мере достаточного обратного сигнала о происходящем вождении в кабину водителя. Однако при динамических ситуациях вождения, таких как смена полосы движения, процессы торможения или переключения, происходит переход к амортизации, ориентированной на динамику, т.е. при этом временно увеличивается сила амортизации и выбирается более жесткая характеристика амортизатора, чтобы таким образом подавать в кабину водителя отчетливый обратный сигнал о происходящем вождении и одновременно подавлять непреднамеренные движения.
Однако в случае если автомобиль общего назначения находится в первом режиме вождения, выбирается амортизация, сильно ориентированная на комфорт, при которой движения по тангажу и крену уменьшаются сильнее, чем во втором режиме вождения, с целью, в максимальной степени избежать обратных сигналов о происходящей езде обратно в кабину водителя.
С помощью отдельных фиг.A-C фиг.4 иллюстрируется другой вариант осуществления изобретения. По этому варианту осуществления амортизирующие элементы 3, 4 крепления кабины водителя выполнены в виде активных амортизаторов, которые, в зависимости от настройки, могут также создавать активное движение тангажа или движение качания.
На фиг.4A показано состояние автомобиля 1 общего назначения, в котором автомобиль общего назначения движется вперед с равномерной скоростью. В отличие от этого, на фиг.4B изображен процесс ускорения автомобиля общего назначения, а на фиг.4C - процесс торможения автомобиля общего назначения.
Как изображено на фиг.4B, шасси 7 при процессе ускорения на передней стороне слегка наклоняется вверх, в то время как при процессе торможения, как изображено на фиг.4C, получается точно обратный эффект, так что передняя сторона шасси 7 наклоняется вниз. Эти эффекты утрированно изображены на фиг.4B и 4C.
Следующие варианты осуществления касаются исключительно первого режима вождения, т.е. ситуации, в которой автомобиль общего назначения эксплуатируется автономно или по меньшей мере частично-автономно.
Если в первом режиме вождения констатируется, что автомобиль 1 общего назначения выполняет положительное продольное ускорение, как схематично изображено на фиг.4B, то кабина 2 водителя посредством активных амортизаторов 3, 4 в передней области активно наклоняется вниз, напр., таким образом, что выдвигаются задние активные амортизаторы (и/или вдвигаются передние амортизаторы). Это имеет тот эффект, что продольное ускорение, воспринимаемое человеком в кабине 2 водителя, частично уменьшается, или предпочтительно предельно уменьшается, так что человек в кабине 2 водителя совсем не воспринимает это продольное ускорение. Аналогичным образом при продольном замедлении (отрицательное продольное ускорение) автомобиля 1 общего назначения, как изображено на фиг.4C, кабина 2 водителя наклоняется назад, напр., таким образом, что выдвигаются передние активные амортизаторы (и/или вдвигаются задние амортизаторы). Подчеркивается, что эффекты качания на фиг.4B и 4C сильно утрированы и изображены без соблюдения масштаба. Описанная система компенсации продольных ускорений представима также с только двумя активными амортизаторными элементами (спереди или сзади).
Равным образом могут также компенсироваться эффекты поперечных ускорений, так чтобы люди в кабине водителя не воспринимали возникновение поперечных ускорений. При этом кабина водителя, в зависимости от направления поперечного ускорения, наклоняется в направлении либо одной, либо другой стороны, таким образом, что активные амортизаторы соответственно вдвигаются или выдвигаются только на одной стороне кабины водителя.
Хотя изобретение было описано со ссылкой на определенные примеры осуществления, для специалиста является очевидным, что могут выполняться разные изменения и в качестве замены могут использоваться эквиваленты, без выхода из объема изобретения. Дополнительно могут выполняться многие модификации, без выхода из соответствующего объема. Следовательно, изобретение должно не быть ограничено раскрытыми примерами осуществления, а включать в себя все примеры осуществления, которые попадают в объем прилагаемых пунктов формулы изобретения. В частности, изобретение претендует также на охрану предмета изобретении признаков зависимых пунктов формулы изобретения, независимо от пунктов формулы изобретения, на которые делалась ссылка.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Автомобиль общего назначения
2 Кабина водителя
3, 4 Регулируемые амортизаторы крепления кабины водителя
5, 6 Регулируемые амортизаторы ходовой части
7 Рама транспортного средства (шасси)
8 Шины
9 Система помощи водителю для автономного ведения транспортного средства
10 Блок-схема
11-16 Шаги регулирования способа регулирования для обнаружения силы амортизации крепления кабины водителя
20 Устройство управления


Группа изобретений относится к устройству для осуществления управления с обратной связью или без обратной связи креплением кабины водителя автомобиля. Автомобиль включает в себя кабину водителя, крепление кабины водителя, имеющее регулируемые амортизаторы. Автомобиль может эксплуатироваться в автономном или частично автономном первом режиме вождения, в котором автомобиль посредством системы помощи водителю автоматически выполняет ведение автомобиля, включающее в себя как операцию продольного ведения, так и операцию поперечного ведения автомобиля, и может эксплуатироваться во втором режиме вождения так, что может управляться водителем, и в этом режиме вождения водитель автомобиля должен сам выполнять часть ведения автомобиля. Автомобиль имеет устройство управления для адаптации силы амортизации регулируемых амортизаторов крепления кабины водителя автомобиля. Достигается адаптация силы амортизации регулируемых амортизаторов крепления кабины водителя автомобиля. 3 н. и 5 з.п. ф-лы, 4 ил.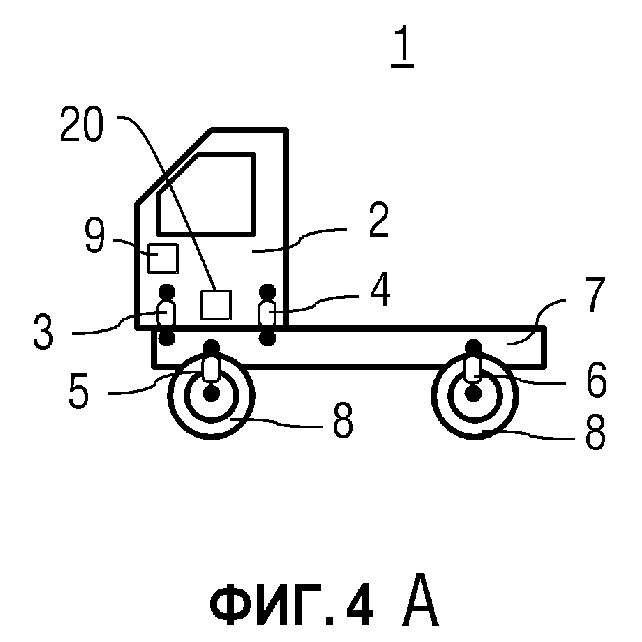
1. Способ осуществления управления с обратной связью или без обратной связи креплением кабины водителя автомобиля, причем крепление кабины водителя имеет амортизаторы, регулируемые по своей силе амортизации, причем автомобиль
может эксплуатироваться в автономном и/или частично автономном первом режиме вождения, в котором автомобиль посредством системы помощи водителю автоматически выполняет ведение автомобиля, включающее в себя как операцию продольного ведения, так и поперечного ведения автомобиля; и
может эксплуатироваться во втором режиме вождения так, что он может управляться водителем, и в этом режиме вождения водитель автомобиля должен сам выполнять по меньшей мере часть ведения автомобиля,
и при этом, если автомобиль эксплуатируется в первом режиме вождения, регулируемые амортизаторы крепления кабины водителя приводят в действие или регулируют так, что движения по тангажу и/или крену уменьшаются по сравнению со вторым режимом вождения, отличающийся
a) регулированием силы амортизации регулируемых амортизаторов крепления кабины водителя способом «skyhook»; и
b) регулированием силы амортизации регулируемого амортизатора крепления ходовой части автомобиля способом «groundhook».
2. Способ по п.1, отличающийся тем, что, если автомобиль эксплуатируется в первом режиме вождения, продольное ускорение, воспринимаемое человеком в кабине водителя при продольном ускорении автомобиля, по меньшей мере частично уменьшают благодаря тому, что при продольном ускорении автомобиля кабина водителя наклоняется вперед посредством крепления кабины водителя, а при продольном замедлении наклоняется назад.
3. Способ по любому из предыдущих пунктов, отличающийся тем, что, если автомобиль эксплуатируется в первом режиме вождения, поперечное ускорение, воспринимаемое человеком в кабине водителя при поперечном ускорении автомобиля, по меньшей мере частично уменьшают благодаря тому, что при поперечном ускорении автомобиля кабина водителя наклоняется в сторону посредством крепления кабины водителя.
4. Способ по любому из предыдущих пунктов, отличающийся тем, что, если автомобиль эксплуатируется в первом режиме вождения,
a) создаваемый при движении на подъем наклон кабины водителя автомобиля назад по меньшей мере частично уменьшают благодаря тому, что кабина водителя наклоняется вперед посредством крепления кабины водителя; и/или
b) создаваемый при движении на спуск наклон автомобиля вперед по меньшей мере частично уменьшают благодаря тому, что кабина водителя наклоняется назад посредством крепления кабины водителя.
5. Устройство управления для адаптации силы амортизации регулируемых амортизаторов крепления кабины водителя автомобиля, выполненное с возможностью
a) обнаруживать, эксплуатируется ли автомобиль в автономном или частично автономном первом режиме вождения, в котором автомобиль посредством системы помощи водителю автоматически выполняет ведение автомобиля, включающее в себя как операцию продольного ведения, так и операцию поперечного ведения автомобиля, или эксплуатируется во втором режиме вождения так, что может управляться водителем, или эксплуатируется во втором режиме вождения, в котором водитель автомобиля сам выполняет по меньшей мере часть ведения автомобиля, и
b) если автомобиль эксплуатируется в первом режиме вождения, приводить в действие или регулировать регулируемые амортизаторы крепления кабины водителя так, чтобы движения по тангажу и/или крену уменьшались по сравнению со вторым режимом вождения, отличающееся
регулированием силы амортизации регулируемых амортизаторов крепления кабины водителя способом «skyhook»; и
регулированием силы амортизации регулируемого амортизатора крепления ходовой части автомобиля способом «groundhook».
6. Устройство управления по п.5, отличающееся тем, что оно предназначено для адаптации силы амортизации регулируемых амортизаторов крепления кабины водителя автомобиля общего назначения.
7. Автомобиль, включающий в себя кабину водителя, крепление кабины водителя, имеющее регулируемые амортизаторы, причем автомобиль может эксплуатироваться в автономном или частично автономном первом режиме вождения, в котором автомобиль посредством системы помощи водителю автоматически выполняет ведение автомобиля, включающее в себя как операцию продольного ведения, так и операцию поперечного ведения автомобиля, и может эксплуатироваться во втором режиме вождения так, что может управляться водителем, и в этом режиме вождения водитель автомобиля должен сам выполнять по меньшей мере часть ведения автомобиля, при этом автомобиль имеет устройство управления по п.5 или 6.
8. Автомобиль по п.7, отличающийся тем, что он является автомобилем общего назначения.
| DE 102013204024 A1, 11.09.2014 | |||
| US 2013218414 A1, 22.08.2013 | |||
| US 2014246820 A1, 04.09.2014 | |||
| US 6273203 B1, 14.08.2001 | |||
| US 2008319609 A1, 25.12.2008. |

