Изобретение относится к сервисам, специально предназначенным для беспроводных сетей, а именно к системам, позволяющим осуществлять управление на основании местоположения объектов контроля. Предложенная в заявке система содержит также узлы, относящиеся к устройствам ввода для передачи данных, подлежащих преобразованию в форму, пригодную для обработки в вычислительной машине. В целом система может быть полезна для обеспечения безопасности и контроля над деятельностью и состоянием работников предприятия.
Из уровня техники известна система для оперативного контроля и управления состоянием удаленного объекта (RU 30207U1, МПК G08B 13/22, опубл. 20.06.2003), включающая датчик изменения параметра состояния контролируемого объекта, средства для приема-передачи сигнала по линии сотовой связи к средству для приема этих сигналов.
Недостатком известной системы является ее низкая надежность, вследствие того, что она может функционировать только через операторов сотовой связи GSM.
Наиболее близким техническим решением к заявленному изобретению и выбранным в качестве прототипа признана телемеханическая система контроля и управления удаленными объектами (RU 2455768 C2, МПК Н04Н 60/76, опубл. 10.07.2012). Система контроля содержит удаленные объекты, контроллеры телеуправления с интегрированными модемами GSM GPRS, каналы периферийной связи, антенно-фидерные устройства контроллеров телеуправления, GSM GPRS-каналы приемопередачи данных с использованием программного протокола на основе стека TCP/IP, антенно-фидерные устройства мобильного оператора, GSM GPRS-сервер мобильного оператора связи, сервер сбора данных и управления, выделенный Internet-сервер со статическим IP-адресом и автоматизированные рабочие места.
К основным недостаткам известной системы следует отнести следующие:
• удаленному рабочему месту диспетчера для управления системой необходима сеть Интернет и стабильное подключение к оператору сотовой связи;
• отсутствует возможность интеграции системы с мобильными радиостанциями;
• отсутствует возможность использования собственного центра мониторинга (сервера) контролируемых мобильных объектов;
• отсутствует возможность вывода сигналов «Тревога» на монитор удаленного рабочего места диспетчера.
• не предусмотрена возможность формирования отчетов по событиям контролируемых объектов: прохождение по точкам маршрута, отклонение от маршрута, пребывание в заданных зонах наблюдения, а также других событий, на выбор оператора;
• не предусмотрена рассылка отчетов по выбранным email-адресам ответственных работников.
Технической задачей, на решение которой направлено заявленное изобретение, является расширение функциональных возможностей системы обеспечения безопасности мобильных объектов.
Указанная задача решена тем, что система обеспечения безопасности мобильных контролируемых объектов содержит удаленные мобильные контролируемые объекты, снабженные портативными абонентскими радиостанциями, соединенными посредством каналов цифровой транкинговой радиосвязи с базовой наземной станцией, подключенной с помощью двунаправленного цифрового канала связи стандарта Е1 к центральному коммутатору. Отличает систему безопасности от известных аналогов то, что портативные абонентские радиостанции снабжены гироскопами и тревожными кнопками; базовая станция посредством канала цифровой транкинговой радиосвязи соединена со стационарным приемопередающим устройством, выполненным в виде микропроцессорной системы, снабженной синхронно-асинхронным приемопередатчиком USART; приемо-передающее устройство через упомянутый приемопередатчик посредством интерфейса RS-232 подключено к центральному серверу системы, а к последнему с помощью локальной сети стандарта Ethernet подключено автоматизированное рабочее место оператора системы обеспечения безопасности.
Положительный технический результат, обеспечиваемый раскрытыми выше признаками системы, заключается в обеспечении безопасного передвижения мобильных контролируемых объектов и возможности быстрой передачи сигнала тревоги на автоматизированное рабочее место оператора системы, что в целом обеспечивает непрерывный контроль над деятельностью и состоянием работников, а также оперативное реагирование оператора на возникновение нештатных ситуаций при обслуживании эксплуатационных объектов.
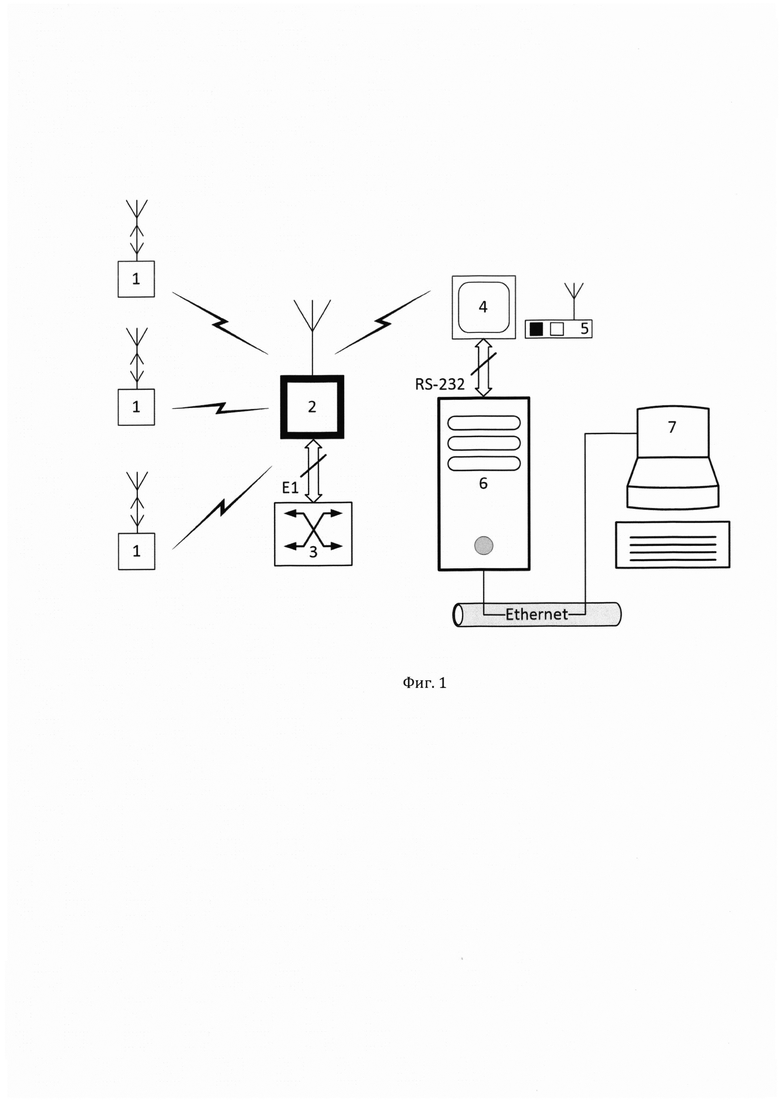
Изобретение поясняется чертежами, где на фиг. 1 показана структурная схема системы безопасности; на фиг. 2 показана структурная схема портативной абонентской радиостанции; на фиг. 3, 4 показана структура пользовательского интерфейса автоматизированного рабочего места оператора «АРМ «Сфера»; на фиг. 5, 6 приведены блок-схемы, иллюстрирующие принципы работы функций «Тревога или падение» и «Тревожная кнопка»; на фиг. 7 приведена схема контроля передвижения контролируемых объектов с фиксацией отклонений от заданного маршрута; на фиг. 8 приведена схема заданной зоны наблюдения.
Система обеспечения безопасности мобильных контролируемых объектов имеет следующие состав и структуру.
Система состоит из удаленных мобильных контролируемых объектов, каждый из которых снабжен портативной абонентской радиостанцией 1, в качестве которых могут применяться мобильные терминалы моделей THR9i, THR9Ex, TH1n1 (1Абонентское оборудование AIRBUS (Cassidian) Tetra // Airbus Cassidian TETRA. URL: https://cassidiantetra.ru/solutions/Abonentskoe-oborudovanie/ (дата обращения: 12.03.2019)). Посредством каналов цифровой транкинговой радиосвязи абонентские радиостанции 1 соединены с базовой наземной станцией 2, в качестве которой может применяться, например, станция EADS TETRA ТВ32 (2ТВ3 полноразмерная (модульная) БС - до 4 приемопередатчиков AIRBUS (Cassidian) Tetra // Airbus Cassidian TETRA. URL: https://cassidiantetra.ru/solutions/cart/Bazovye-stantcii/TB3-i-TB3c/ (дата обращения: 12.03.2019)). Наземная базовая станция 2 с помощью двунаправленного цифрового канала связи стандарта Е1 подключена к центральному коммутатору 3, в качестве которого может быть применен транзитно-оконечный коммутатор модели DXT33 (3DXT3 Коммутатор (320 несущих) AIRBUS (Cassidian) Tetra // Airbus Cassidian TETRA. URL: https://cassidiantetra.ru/solutions/cart/Kommutatory/DXT3/ (дата обращения: 12.03.2019)).
Базовая станция 2 посредством канала цифровой транкинговой радиосвязи соединена со стационарным приемопередающим устройством 4, выполненным в виде микропроцессорной системы, снабженной синхронно-асинхронным приемопередатчиком USART. В качестве такого устройства может выступать персональный компьютер, снабженный радиомодемом TETRA4 (4Встраиваемый радиомодем TETRA для передачи телеметрии // Airbus. Cassidian Tetra. URL: https://cassidiantetra.ru/news/cart/Novosti/Vstraivaemyi-radiomodem-TETRA-dlya-peredachi-telemetrii/ (дата обращения: 14.03.2019)) (5). Приемопередающее устройство 4 через упомянутый приемопередатчик посредством интерфейса RS-232 подключено к центральному серверу 6 системы, а к последнему с помощью локальной сети стандарта Ethernet подключено автоматизированное рабочее место оператора 7 системы обеспечения безопасности.
Центральный сервер 6 представляет собой компьютер с установленными на нем программным обеспечением, необходимым для взаимодействия сервера с автоматизированным рабочим местом оператора 7 и SQL-сервером, обслуживающим базу данных системы обеспечения безопасности. Данные от портативных абонентских радиостанций 1 контролируемых объектов поступают на центральный сервер 6 по радиоканалу и содержат информацию о GPS-координатах, скорости передвижения и азимуте контролируемых объектов, а также об изменении состояния гироскопа радиостанций. Инициирование процесса передачи данных от радиостанций 1 контролируемых объектов на центральный сервер 6 происходит как со стороны радиостанций, так и по запросу от сервера с настраиваемым оператором интервалом времени.
Автоматизированное рабочее место оператора 7 выполнено на основе персонального компьютера, с установленным на нем программным обеспечением «АРМ «Сфера», представляющим собой специализированную автоматизированную систему мониторинга, реализованную в виде оконного приложения, работающего под управлением операционной системы MS Windows. Количество автоматизированных рабочих мест 7 определяется количеством имеющихся аппаратных ключей доступа. Оператор рабочего места 7 осуществляет запуск системы мониторинга под своей учетной записью, что позволяет настроить возможности и ограничения приложения индивидуально для каждого пользователя. Все действия оператора за последний месяц протоколируются на центральном сервере 6 для обеспечения возможности восстановления утраченной информации при возможных ошибочных действиях.
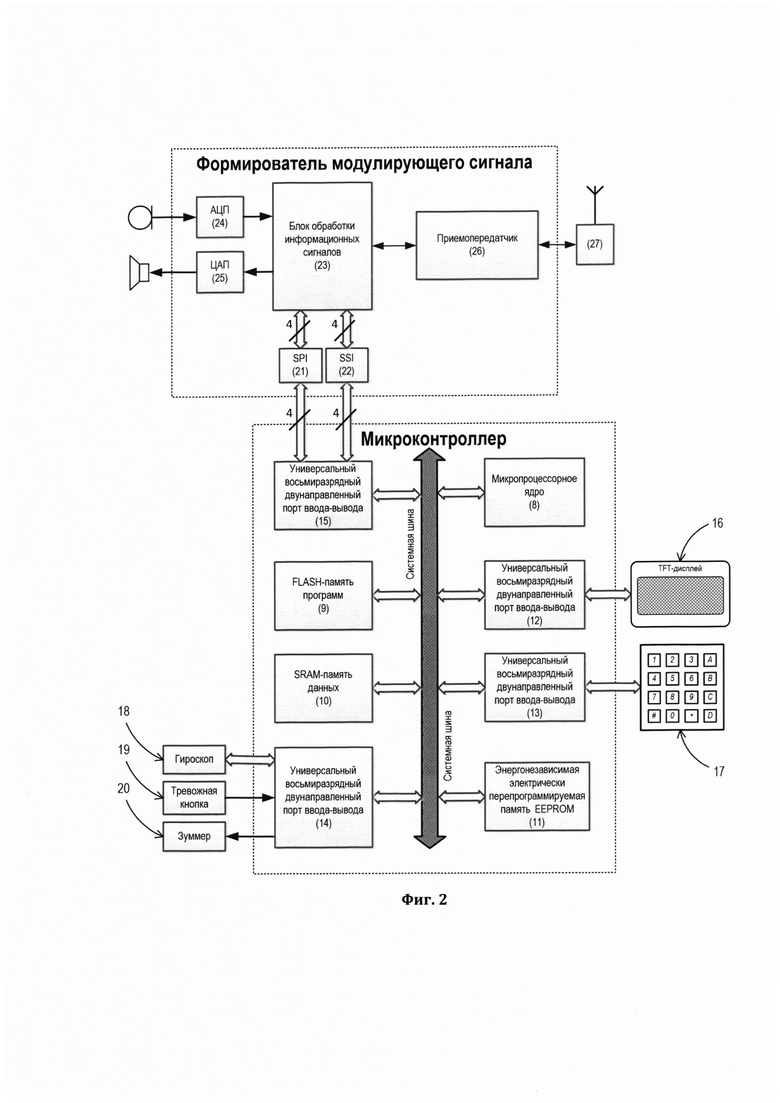
Каждая из портативных абонентских радиостанций 1, кроме варианта использования известных мобильных терминалов упомянутых выше, для обеспечения выполнения уникальных и необходимых для конкретного вида производственной деятельности функций может быть изготовлена индивидуально из известных электронных узлов и компонентов. В этом случае абонентская радиостанция может быть построена на базе тридцатидвухразрядного микроконтроллера, основанного на архитектуре STM325 (5NUCLEO-F411RE, Отладочная плата на базе MCU STM32F411RET6 // Чип и Дип. URL: https://www.chipdip.ru/product/nucleo-f411re-2 (дата обращения: 14.03.2019)) и иметь обобщенную структуру, описанную ниже (фиг. 2).
Радиостанция содержит микроконтроллер, включающий в себя микропроцессорное ядро 8, соединенное с помощью системной шины с FLASH-памятью программ 9, SRAM-памятью данных 10, энергонезависимой электрически перепрограммируемой памятью EEPROM 11 и четырьмя универсальными восьмиразрядными двунаправленными портами ввода-вывода 12, 13, 14 и 15. К первому порту ввода-вывода 12 подключен TFT-дисплей 16, ко второму порту ввода-вывода 13 подключена кнопочная клавиатура 17, к третьему порту ввода-вывода 14 подключены гироскоп 18, выполненный, например, на основе микросхемы ADXL345 GY2916 (6Гироскоп ADXL345 GY291 // AliExpress. URL: https://ru.aliexpress.com/item/ADXL345-GY291-Digital-3Axis-Tiple-Gravity-Accelerometer-Sensor-Detector-ADXL345-GY-291-Electronic-DIY-5v-13Bit/32619439512 (дата обращения: 14.03.2019)), тревожная кнопка 19 и зуммер 20, а к четвертому порту ввода-вывода 15, подключены четырехбитные последовательные интерфейсы программирования управляющих регистров (SPI) 21 и передачи данных (SSI) 22 формирователя модулирующего сигнала, который может быть построен на основе отечественной микросхемы 1321ХД2У7 (71321ХД2У. Описание и параметры // Миландр URL: https://ic.milandr.ru/products/radiochastotnye_mikroskhemy/1321khd2u/ (дата обращения: 14.03.2019)). Упомянутые четырехбитные последовательные интерфейсы 21 и 22 соединены с блоком обработки информационных сигналов 23, к которому подключены аналого-цифровой и цифро-аналоговый преобразовали 24 и 25, а также приемопередатчик 26, соединенный с внешней антенной 27. К входу аналого-цифрового и выходу цифро-аналогового преобразователей 24 и 25 подключены, соответственно, микрофон и динамик.
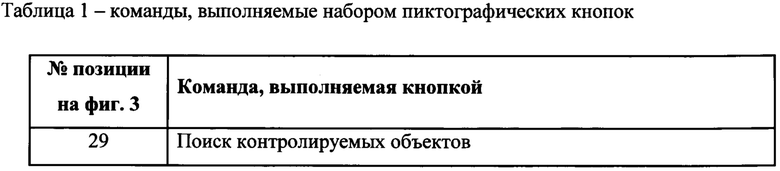
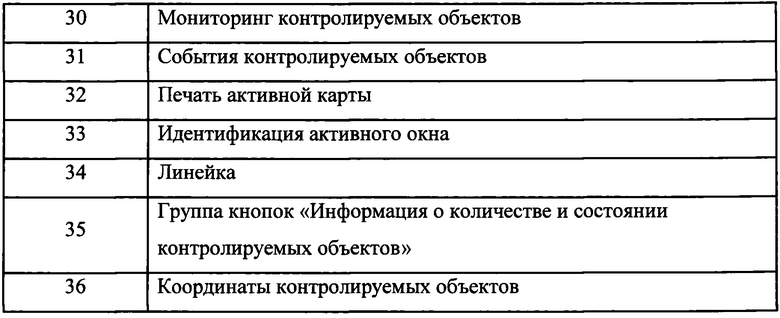
Далее рассмотрим оконный пользовательский интерфейс приложения «АРМ «Сфера», установленного на автоматизированном рабочем месте оператора 7, позволяющий эффективно выполнять задачи мониторинга контролируемых объектов. Его структура и назначение основных элементов управления приведены ниже.
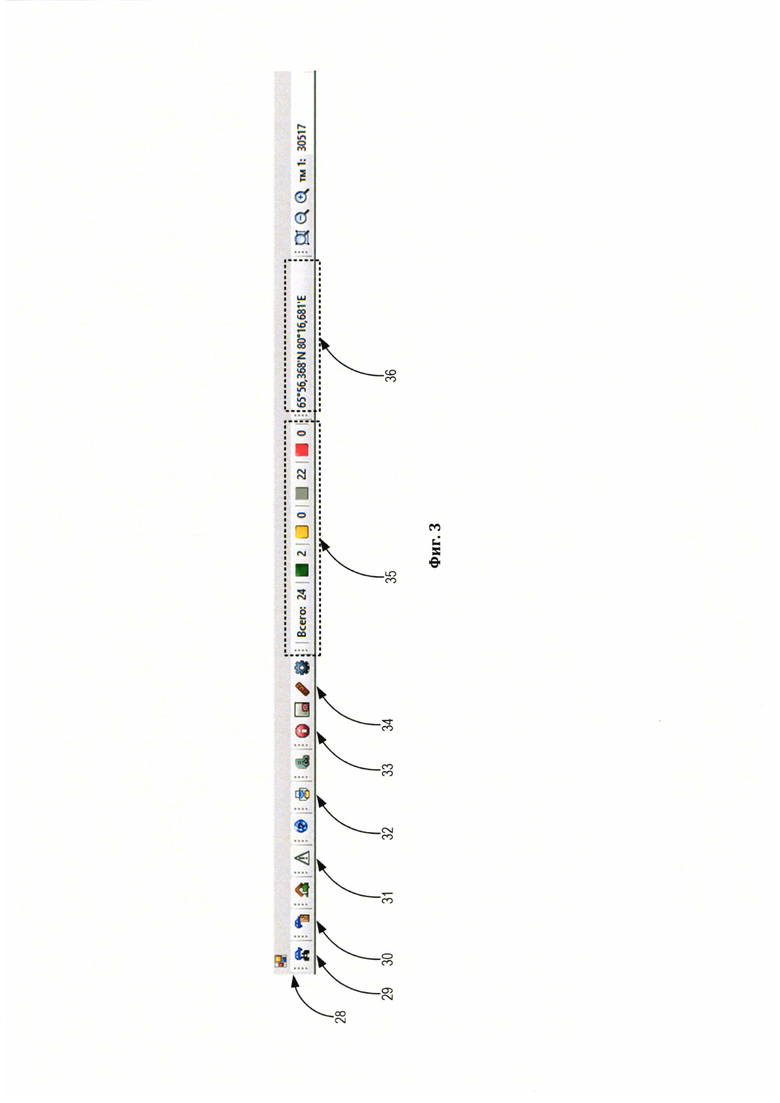
Главная экранная форма программы содержит панель 28, содержащую набор пиктографических кнопок и основную рабочую область, отображающую карту, на которой находятся контролируемые объекты и дополнительные элементы управления (фиг. 3, 4).
В следующей таблице кратко описаны команды, выполняемые набором пиктографических кнопок панели 28.
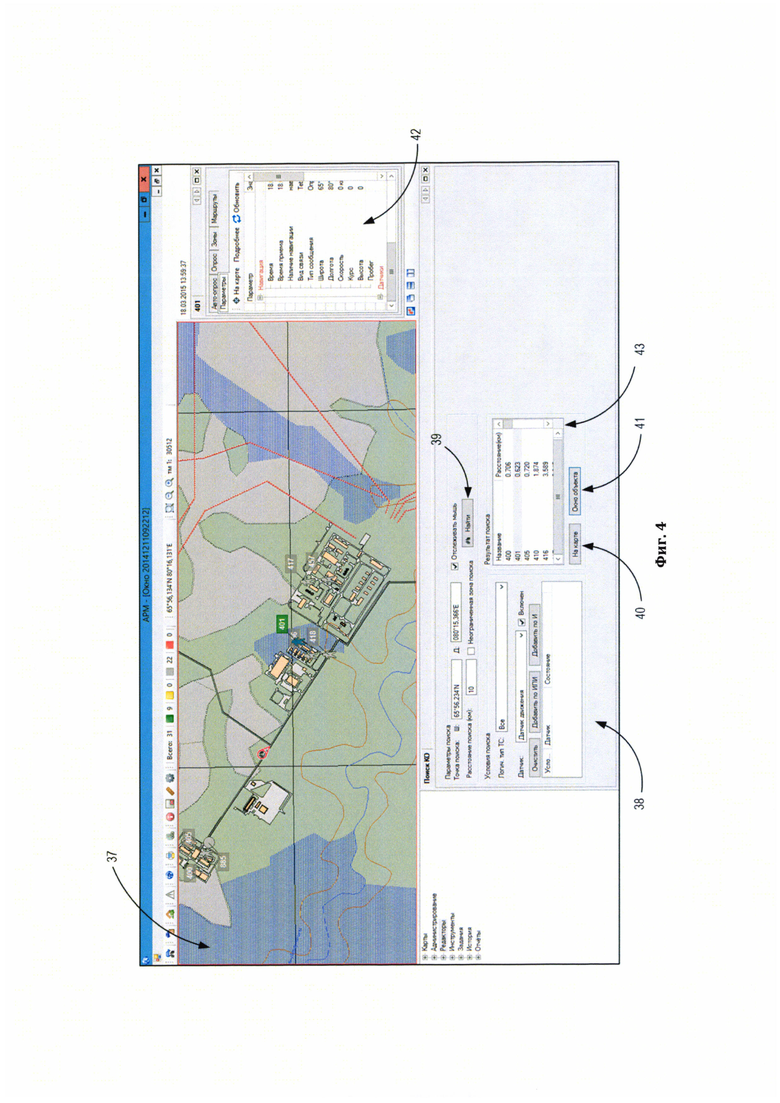
Основная рабочая область включает в себя панель для работы с картами 37, отображающая одну или несколько карт, рабочую панель 38, предназначенную для работы с различными режимами работы системы, при этом каждая из вкладок панели имеет собственный набор элементов управления. Так, например, на фиг. 4 рабочая панель 38 представлена в режиме поиска контролируемых объектов и содержит следующие управляющие элементы:
• кнопка «Найти» 39 - позволяет выполнить поиск объектов по ряду условий, заданных оператором;
• кнопка «На карте» 40 - позволяет показать контролируемые объекты в центре панели для работы с картами;
• кнопка «Окно объекта» 41 - позволяет отобразить на боковой панели свойств 42 дополнительные сведения об объектах контроля (скорость, местоположение, состояние и другие);
• поле со списком (listbox) 43 - позволяет просмотреть перечень найденных контролируемых объектов.
Для облегчения идентификации контролируемых объектов предусмотрено несколько вариантов их отображения на карте. Контролируемый объект изображается в виде значка-пиктограммы, представляющего собой стилизованное изображение человека, соединенного соединительной линией с плашкой, содержащей наименование объекта. Предусмотрено разделение контролируемых объектов на логические типы по категориям: руководство, инженерно-технический состав, рабочие. Цвет и форма значков могут быть изменены оператором.
Для оперативного реагирования оператора на сигналы тревоги в интерфейсе пользователя предусмотрено визуальное и звуковое оповещение. При возникновении нештатной ситуации кнопка 31 «События контролируемых объектов» активируется, на рабочей панели 38 открывается вкладка «События», где появляется сообщение о происшествии, сопровождающееся большим мигающим треугольником с восклицательным знаком «!» в центре экрана и звуковым оповещением. Вкладка «События» отображает текущую информацию о состоянии контролируемого объекта, вид сигнала тревоги (тревога или падение), времени возникновения нештатной ситуации и номера телефона радиостанции. Оператор при обнаружении сигнала тревоги обязан для подтверждения исключения ложного срабатывания, осуществить дозвон на радиостанцию контролируемого объекта, от которой поступил тревожный сигнал, убедится в достоверности сигнала тревоги и принять оперативное решение по оказанию первой помощи пострадавшему.
Работу системы обеспечения безопасности мобильных контролируемых объектов рассмотрим на примерах.
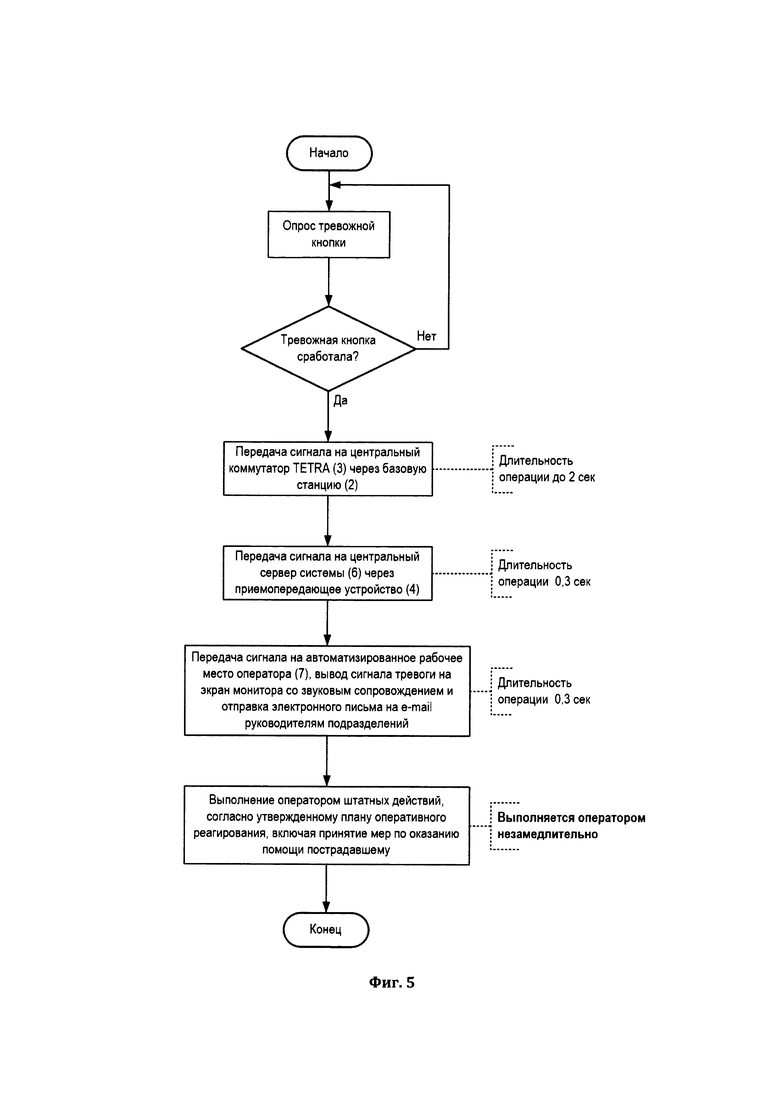
Пример 1. Ручная активация сигнала тревоги.
При возникновении опасной ситуации работник нажимает на портативной абонентской радиостанции 1 тревожную кнопку 19. Микропроцессорное ядро 8 микроконтроллера в соответствии с инструкциями управляющей программы, записанной во FLASH-памяти программ, производя постоянный опрос порта ввода-вывода 14, фиксирует нажатие кнопки, активирует зуммер 20 и передает в автоматическом режиме тревожный сигнал и текущее состояния контролируемого объекта с помощью формирователя модулирующего сигнала на центральный коммутатор 3 через базовую станцию 2 посредством радиоканала. Центральный коммутатор 3, обработав информацию, возвращает ее на базовую станцию 2, которая в свою очередь, передает состояние контролируемого объекта на центральный сервер мониторинга 6 по радиоканалу через приемопередающее устройство 4. На центральном сервере 6 сигнал состояния контролируемого объекта фиксируется, обрабатывается, и отправляется на автоматизированное рабочее место оператора 7. Далее оператор для подтверждения исключения ложного срабатывания, осуществляет дозвон на радиостанцию контролируемого объекта, от которой поступил тревожный сигнал, и принимает оперативное решение по оказанию первой помощи пострадавшему. Параллельно, центральный сервер 6 отправляет электронное письмо руководителю структурного подразделения, к работнику которого принадлежит радиостанция вызвавшая сигнал тревоги, с фиксацией состояния контролируемого объекта в отчете. Блок-схема операций, выполняемых системой безопасности, приведена на фиг. 5. Время от нажатия тревожной кнопки до появления сигнала тревоги на мониторе автоматизированного рабочего места оператора 7 составляет 2,6 сек (фиг. 5).
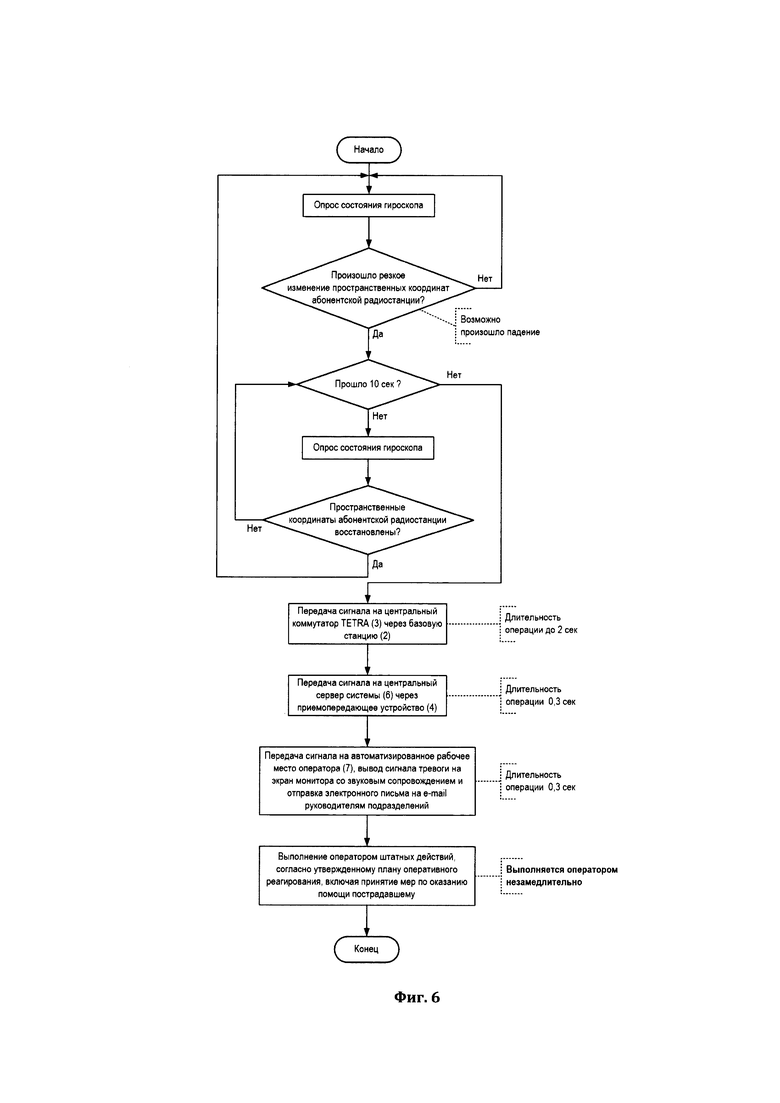
Пример 2. Автоматическая передача тревожного сигнала.
Для активации автоматической передачи тревожного сигнала предварительно активируют функцию «Тревога или падение» путем включения гироскопа 18 радиостанции 1. Для этого работник перед началом производимых работ нажимает и удерживает клавишу «#» (решетка) на клавиатуре 17 радиостанции 1. После включения функции «Тревога или падение», в верхней строке TFT-дисплея 16 появляется информационный значок  подтверждающий ее активацию. Далее работник приступает к выполнению своих производственных обязанностей, при этом микропроцессорное ядро 8 микроконтроллера в соответствии с инструкциями управляющей программы, записанной во FLASH-памяти программ 9, постоянно производит опрос гироскопа 18. В случае, если радиостанция 1 не находится в вертикальном положении более определенного наперед заданного интервала времени (по умолчанию он составляет 5 сек), радиостанцией автоматически генерируется звуковой сигнал тревоги с помощью зуммера 20. Если работник услышал звуковой сигнал и при этом он является ложным срабатыванием (например, выполняются какие-либо работы, при которых радиостанция не может находиться в вертикальном положении), то для отключения зуммера 20 и отмены передачи сигнала тревоги системе безопасности, работник должен нажать на клавиатуре 17 радиостанции 1 соответствующую кнопку отмены вызова. При игнорировании звукового сигнала тревоги работником в течение 5 сек, сигнал тревоги через базовую станцию 2 отправляется на сервер системы 6 и далее поступает на автоматизированное рабочее место оператора 7 с параллельной записью времени события в энергонезависимой электрически перепрограммируемой памяти EEPROM 11 и отправкой электронного письма руководителю структурного подразделения, к которому принадлежит радиостанция, с фиксацией состояния контролируемого объекта в отчете. После срабатывания сигнала тревоги функция «Тревога или падение» автоматически отключается. Время от срабатывания сигнала тревоги до его появления на мониторе автоматизированного рабочего места оператора 7 составляет 12,6 сек (фиг. 6).
подтверждающий ее активацию. Далее работник приступает к выполнению своих производственных обязанностей, при этом микропроцессорное ядро 8 микроконтроллера в соответствии с инструкциями управляющей программы, записанной во FLASH-памяти программ 9, постоянно производит опрос гироскопа 18. В случае, если радиостанция 1 не находится в вертикальном положении более определенного наперед заданного интервала времени (по умолчанию он составляет 5 сек), радиостанцией автоматически генерируется звуковой сигнал тревоги с помощью зуммера 20. Если работник услышал звуковой сигнал и при этом он является ложным срабатыванием (например, выполняются какие-либо работы, при которых радиостанция не может находиться в вертикальном положении), то для отключения зуммера 20 и отмены передачи сигнала тревоги системе безопасности, работник должен нажать на клавиатуре 17 радиостанции 1 соответствующую кнопку отмены вызова. При игнорировании звукового сигнала тревоги работником в течение 5 сек, сигнал тревоги через базовую станцию 2 отправляется на сервер системы 6 и далее поступает на автоматизированное рабочее место оператора 7 с параллельной записью времени события в энергонезависимой электрически перепрограммируемой памяти EEPROM 11 и отправкой электронного письма руководителю структурного подразделения, к которому принадлежит радиостанция, с фиксацией состояния контролируемого объекта в отчете. После срабатывания сигнала тревоги функция «Тревога или падение» автоматически отключается. Время от срабатывания сигнала тревоги до его появления на мониторе автоматизированного рабочего места оператора 7 составляет 12,6 сек (фиг. 6).
В случае ложного срабатывания для дальнейшего продолжения работы работнику необходимо повторно активировать функцию «Тревога или падение» способом, описанным выше. Для принудительного отключения функции необходимо нажать и удерживать клавишу «#» (решетка) на клавиатуре 17 радиостанции 1. После отключения функции «Тревога или падение», в верхней строке дисплея значок  исчезнет. Функция «Тревога или падение» работает независимо от сигнала спутниковой навигационной системы GPS. Последняя позволяет добавить определение текущего местоположения контролируемого объекта с привязкой к картографической подложке. Если при отправке тревожного сигнала на автоматизированное рабочее место оператора 7 радиостанция контролируемого объекта не получает сигнал GPS, то на мониторе оператора отображается последнее известное местоположение контролируемого объекта на карте.
исчезнет. Функция «Тревога или падение» работает независимо от сигнала спутниковой навигационной системы GPS. Последняя позволяет добавить определение текущего местоположения контролируемого объекта с привязкой к картографической подложке. Если при отправке тревожного сигнала на автоматизированное рабочее место оператора 7 радиостанция контролируемого объекта не получает сигнал GPS, то на мониторе оператора отображается последнее известное местоположение контролируемого объекта на карте.
Пример 3. Отслеживание передвижения контролируемых объектов вдоль заданного маршрута и в заданных зонах наблюдения.
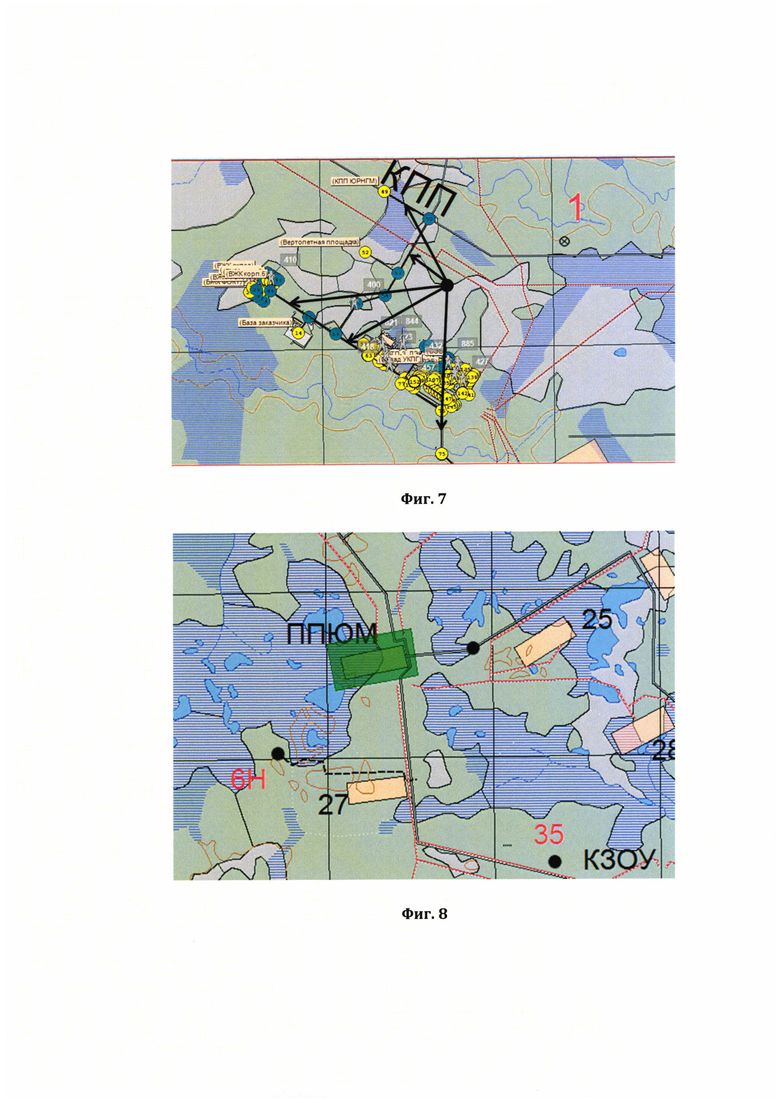
Для обеспечения безопасности мобильных объектов и контроля исполнительной дисциплины работников в системе предусмотрена возможность отслеживания передвижения контролируемых объектов с фиксацией отклонений от заданного маршрута (фиг. 7) и контроля пребывания объектов в заданных зонах наблюдения (фиг. 8). Система позволяет создавать различные маршруты для контроля передвижений объектов, например, при выполнении работником обхода территории. Маршрут движения контролируемого объекта определяется совместно с руководителем структурного подразделения, к которому принадлежит радиостанция. При отклонении контролируемого объекта от маршрута, соответствующий сигнал предупреждения автоматически отправляется на автоматизированное рабочее место оператора 7 с параллельной отправкой электронного письма руководителю структурного подразделения, к которому принадлежит радиостанция, с фиксацией отклонения объекта от маршрута движения в отчете.
Контроль пребывания контролируемых объектов в заданных зонах наблюдения (фиг. 8) способствует повышению исполнительной дисциплины работников при выполнении производственных работ на объектах. Система позволяет создавать различные зоны наблюдения для контроля работников при производстве работ на объектах. Под зоной наблюдения понимается открытый участок территории, на котором расположены удаленные производственные площадки, где производятся работы. К зонами наблюдения относятся также и зоны повышенного внимания. Зоны наблюдения контролируемых объектов определяются совместно с руководителем структурного подразделения, к которому принадлежит радиостанция. При выходе контролируемого объекта из зоны наблюдения соответствующий сигнал предупреждения отправляется на автоматизированное рабочее место оператора 7 с параллельной отправкой электронного письма руководителю структурного подразделения, к которому принадлежит радиостанция, с фиксацией отклонения объекта от маршрута движения в отчете.
Таким образом, рассмотренная в настоящей заявке система обеспечения безопасности мобильных контролируемых объектов обеспечивает наблюдение и получение достоверной информации от контролируемых мобильных объектов в непрерывном режиме. Это позволяет сократить время реагирования оператора на возникновение нештатных ситуаций при обслуживании эксплуатационных объектов, в результате чего кратно повышается безопасность и административный контроль работников на производственных объектах. Появляется возможность гибкого формирования отчетов о событиях, происходящих с объектами, например, прохождение по точкам маршрута, отклонение от маршрута, добавление/редактирование локальных зон наблюдения, пребывание в заданных зонах наблюдения и других. Дополнительно система обеспечивает возможность рассылки отчетов по выбранным e-mail адресам посредством корпоративной электронной почты. Также, в результате эксплуатации системы, оператор имеет возможность моделировать нештатные ситуации с отработкой сценариев реагирования на тревожный сигнал, по результатам отработки которых, проводится анализ мероприятий с принятием корректирующих действий по каждой смоделированной ситуации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ УЗЕЛ СПУТНИКОВОЙ СВЯЗИ | 2007 |
|
RU2342787C1 |
| МОБИЛЬНАЯ СТАНЦИЯ ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2398353C2 |
| МОБИЛЬНЫЙ УЗЕЛ ПОДВИЖНОЙ СВЯЗИ | 2005 |
|
RU2293442C1 |
| КОМПЛЕКС СРЕДСТВ ВИДЕОНАБЛЮДЕНИЯ И СВЯЗИ МОБИЛЬНОГО ПУНКТА УПРАВЛЕНИЯ | 2011 |
|
RU2468522C1 |
| Система оповещения работников на железнодорожных путях при производстве ремонтно-путевых работ | 2018 |
|
RU2701267C1 |
| МОБИЛЬНЫЙ ПУНКТ СБОРА, УЧЕТА И ОБРАБОТКИ ДАННЫХ О ГРАЖДАНАХ МИГРАЦИОННОЙ СЛУЖБЫ | 2008 |
|
RU2365985C1 |
| СИСТЕМА ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2387080C1 |
| МОБИЛЬНАЯ СТАНЦИЯ НАЗЕМНОЙ ПОДВИЖНОЙ СЛУЖБЫ | 2008 |
|
RU2371850C1 |
| СИГНАЛИЗАТОР ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРЕВОЖНЫХ И КРИТИЧЕСКИХ СИТУАЦИЙ | 2016 |
|
RU2631102C2 |
| ПОДВИЖНЫЙ УЗЕЛ СВЯЗИ МНОГОФУНКЦИОНАЛЬНОГО НАЗНАЧЕНИЯ | 2009 |
|
RU2407150C1 |
Изобретение относится к беспроводным сетям, а именно к системам, позволяющим осуществлять управление на основании местоположения объектов контроля. Техническим результатом является расширение функциональных возможностей системы обеспечения безопасности мобильных объектов. Система содержит удаленные мобильные контролируемые объекты, снабженные портативными абонентскими радиостанциями, соединенными посредством каналов цифровой транкинговой радиосвязи с базовой наземной станцией, подключенной с помощью двунаправленного цифрового канала связи стандарта Е1 к центральному коммутатору. Портативные абонентские радиостанции снабжены гироскопами и тревожными кнопками; базовая станция посредством канала цифровой транкинговой радиосвязи соединена со стационарным приемопередающим устройством, выполненным в виде микропроцессорной системы, снабженной синхронно-асинхронным приемопередатчиком USART; приемо-передающее устройство через упомянутый приемопередатчик посредством интерфейса RS-232 подключено к центральному серверу системы, а к последнему с помощью локальной сети стандарта Ethernet подключено автоматизированное рабочее место оператора системы. 3 з.п. ф-лы, 8 ил., 1 табл.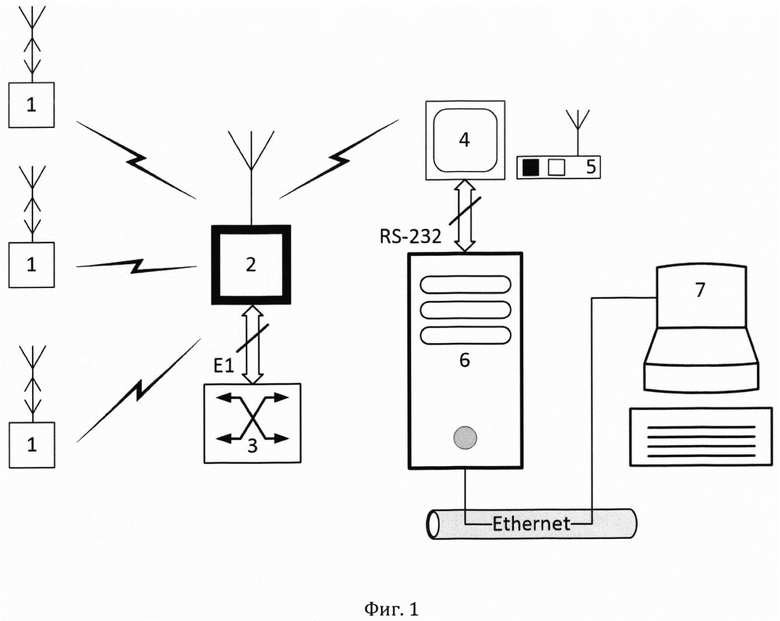
1. Система обеспечения безопасности мобильных контролируемых объектов, содержащая удаленные мобильные контролируемые объекты, снабженные портативными абонентскими радиостанциями, соединенными посредством каналов цифровой транкинговой радиосвязи с базовой станцией, подключенной с помощью двунаправленного цифрового канала связи стандарта Е1 к центральному коммутатору, отличающаяся тем, что портативные абонентские радиостанции снабжены гироскопами и тревожными кнопками; базовая станция посредством канала цифровой транкинговой радиосвязи соединена со стационарным приемопередающим устройством, выполненным в виде микропроцессорной системы, снабженной синхронно-асинхронным приемопередатчиком USART; приемо-передающее устройство через упомянутый приемопередатчик посредством интерфейса RS-232 подключено к центральному серверу системы, а к последнему с помощью локальной сети стандарта Ethernet подключено автоматизированное рабочее место оператора системы обеспечения безопасности.
2. Система обеспечения безопасности мобильных контролируемых объектов по п. 1, отличающаяся тем, что каждая портативная абонентская радиостанция представляет собой терминал THR9Ex.
3. Система обеспечения безопасности мобильных контролируемых объектов по п. 1, отличающаяся тем, что в качестве базовой станции применяется станция EADS TETRA ТВ3.
4. Система обеспечения безопасности мобильных контролируемых объектов по п. 1, отличающаяся тем, что каждая портативная абонентская радиостанция содержит микроконтроллер, включающий в себя микропроцессорное ядро, соединенное с помощью системной шины с FLASH-памятью программ, SRAM-памятью данных, энергонезависимой электрически перепрограммируемой памятью EEPROM и четырьмя универсальными восьмиразрядными двунаправленными портами ввода-вывода; к первому порту ввода-вывода подключен TFT-дисплей, ко второму порту ввода-вывода подключена кнопочная клавиатура, к третьему порту ввода-вывода подключены гироскоп, тревожная кнопка и зуммер, а к четвертому порту ввода-вывода подключены четырехбитные последовательные интерфейсы программирования управляющих регистров и передачи данных формирователя модулирующего сигнала.
| ЦЕНТРАЛИЗОВАННАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМИРОВАНИЯ ПАССАЖИРОВ, ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ И СТАНЦИОННОЙ ПАРКОВОЙ СВЯЗИ | 2012 |
|
RU2497176C1 |
| Способ щипки слюды и устройство для осуществления этого способа | 1955 |
|
SU105776A1 |
| УСТРОЙСТВО ДЛЯ УДАЛЕННОГО МОНИТОРИНГА И АНАЛИЗА РАБОТЫ ТЕХНИЧЕСКИХ СРЕДСТВ ПЕРЕДВИЖНОГО ВЫСТАВОЧНО-ЛЕКЦИОННОГО КОМПЛЕКСА | 2013 |
|
RU2554524C1 |
| Система двухсторонней станционной парковой связи | 2017 |
|
RU2658652C1 |
| АВТОМАТИЗИРОВАННЫЙ РАДИОПЕРЕДАЮЩИЙ УЗЕЛ | 2015 |
|
RU2604817C1 |
| МОБИЛЬНАЯ МНОГОКАНАЛЬНАЯ РАДИОПРИЕМНАЯ АППАРАТНАЯ | 2015 |
|
RU2582993C1 |
| Способ получения несимметричных карбо- и поликарбоцианинов | 1947 |
|
SU72594A1 |
| Способ телемеханического контроля и управления удаленными объектами | 2016 |
|
RU2642365C1 |
| US 20140368643 A1, 18.12.2014 | |||
| US 20140257889 A1, 11.09.2014. | |||

