ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Варианты выполнения, представленные здесь, относятся к способу, контроллеру, компьютерной программе и компьютерному программному продукту для прогнозирования оставшегося полезного срока службы подшипника.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В общих чертах, электрическое азимутальное подруливающее устройство в гондоле представляет собой блок судового движителя, состоящий из воздушного винта с фиксированным шагом, установленного на винторулевой гондоле («гондола»), которая также содержит электродвигатель, приводящий в движение винт. Таким образом, азимутальное подруливающее устройство в гондоле объединяет действие руля, подруливающего устройства и винта в один вращающийся движитель. Электродвигатель в узле азимутального подруливающего устройства в гондоле установлен внутри движителя, а винт соединен непосредственно с валом двигателя. Избегая использования традиционного гребного вала, винт может быть дополнительно ниже кормы судна в чистом потоке воды, тем самым обеспечивая большую гидродинамическую и механическую эффективность. Кроме того, это увеличивает гибкость в общем расположении энергетической установки судна. Электроэнергия для гребного двигателя подается через контактные кольца, которые позволяют азимутальному подруливающему устройству в гондоле поворачиваться на 360 градусов вокруг вертикальной оси. Поскольку узлы азимутальных подруливающих устройств в гондоле используют гребные винты с фиксированным шагом, энергия всегда подается через частотно-регулируемый привод или понижающий преобразователь частоты, который позволяет управлять скоростью и направлением движения гребных двигателей установок.
С точки зрения эксплуатационных качеств движителя, в истории видно, что подшипники линии вала имеют критический показатель важности для незапланированных входов в сухой док. Это означает, что в случае, если судно нуждается в сухом доковании из-за повреждения, связанного с движителем, скорее всего, повреждение, связанное с движителем, вызвано отказом подшипника линии вала. Таким образом, крайне важно поддерживать условия эксплуатации подшипников согласно данным инструкциям по техническому обслуживанию, а также эксплуатировать движитель на основе данных рекомендаций. Кроме того, требуется профилактическое техническое обслуживание для увеличения вероятности сохранения работоспособности движителя до следующего планового сухого докования, особенно в случае повреждения подшипника. Сегодня эту проблему решают с использованием данных из различных источников, которые анализируют в основном на основе экспертных знаний и рекомендаций посредством непрерывного, а также планового мониторинга подшипников несколькими ручными и автоматическими способами. Такой мониторинг может быть трудоемким и, таким образом, может быть трудно точно прогнозировать оставшийся полезный срок службы (RUL) подшипника азимутального подруливающего устройства в гондоле.
Следовательно, все еще существует потребность в улучшенном прогнозе оставшегося полезного срока службы подшипника.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей вариантов выполнения в данном документе является обеспечение эффективного и точного прогнозирования оставшегося полезного срока службы подшипника.
Согласно первому аспекту представлен способ прогнозирования оставшегося полезного срока службы подшипника электрического азимутального подруливающего устройства в гондоле. Способ выполняется контроллером. Способ содержит этап, на котором получают эксплуатационные состояния подшипника. Способ содержит этап, на котором прогнозируют оставшийся полезный срок службы подшипника с использованием эксплуатационных состояний. Срок службы подшипника делят на три отдельных фазы. Оставшийся полезный срок службы подшипника прогнозируют по-разному на трех отдельных фазах.
Согласно второму аспекту представлен контроллер для прогнозирования оставшегося полезного срока службы подшипника электрического азимутального подруливающего устройства в гондоле. Контроллер содержит схему обработки. Схема обработки выполнена с возможностью побуждать контроллер получать эксплуатационные состояния подшипника. Схема обработки выполнена с возможностью заставлять контроллер прогнозировать оставшийся полезный срок службы подшипника с использованием эксплуатационных состояний. Срок службы подшипника делят на три отдельных фазы. Оставшийся полезный срок службы подшипника прогнозируют по-разному на трех отдельных фазах.
Согласно третьему аспекту представлен контроллер для прогнозирования оставшегося полезного срока службы подшипника электрического азимутального подруливающего устройства в гондоле. Контроллер содержит модуль получения, выполненный с возможностью получать эксплуатационные состояния подшипника. Контроллер содержит модель прогнозирования, выполненный с возможностью прогнозировать оставшийся полезный срок службы подшипника с использованием эксплуатационных состояний. Срок службы подшипника делят на три отдельных фазы. Оставшийся полезный срок службы подшипника прогнозируют по-разному на трех отдельных фазах.
Согласно четвертому аспекту представлен контроллер для прогнозирования оставшегося полезного срока службы подшипника электрического азимутального подруливающего устройства в гондоле. Контроллер содержит схему обработки и носитель хранения данных. Носитель хранения данных хранит инструкции, которые при исполнении схемой обработки заставляют контроллер выполнять операции или этапы. Операции или этапы заставляют контроллер получать эксплуатационные состояния подшипника. Операции или этапы заставляют контроллер прогнозировать оставшийся полезный срок службы подшипника с использованием эксплуатационных состояний. Срок службы подшипника делят на три отдельных фазы. Оставшийся полезный срок службы подшипника прогнозируют по-разному на трех отдельных фазах.
Предпочтительно это обеспечивает эффективное прогнозирование оставшегося полезного срока службы подшипника.
Предпочтительно раскрытые в настоящем документе способ и контроллер позволяют эффективно прогнозировать RUL для подшипника азимутального подруливающего устройства в гондоле. Дополнительно, эффективное прогнозирование RUL может быть использовано в качестве входных данных для эффективного прогнозирования технического обслуживания для подшипника азимутального подруливающего устройства в гондоле.
Предпочтительно раскрытые в настоящем документе способ и контроллер позволяют уменьшать затраты на техническое обслуживание и избегать незапланированных остановок путем адаптации эксплуатационных состояний для оптимального планирования технического обслуживания.
Согласно пятому аспекту представлена компьютерная программа для прогнозирования оставшегося полезного срока службы подшипника электрического азимутального подруливающего устройства в гондоле, причем компьютерная программа содержит код компьютерной программы, который при запуске на контроллере заставляет контроллер выполнять способ согласно первому аспекту.
Согласно шестому аспекту представлен компьютерный программный продукт, содержащий компьютерную программу согласно пятому аспекту, и машиночитаемый носитель хранения данных, на котором хранится компьютерная программа. Машиночитаемый носитель хранения данных может быть постоянной машиночитаемым носителем хранения данных для долговременного хранения информации.
Следует отметить, что любой признак первого, второго, третьего, четвертого, пятого и шестого аспектов может быть применен к любому другому аспекту, где это уместно. Аналогичным образом, любое преимущество первого аспекта может в равной степени применяться ко второму, третьему, четвертому, пятому и/или шестому аспекту соответственно и наоборот. Другие цели, признаки и преимущества прилагаемых вариантов выполнения будут очевидны из следующего подробного раскрытия, из приложенной зависимой формулы изобретения, а также из чертежей.
В общем, все термины, используемые в формуле изобретения, должны интерпретироваться согласно их обычным значениям в области техники, если в настоящем документе не указано иное. Все ссылки на «элемент, устройство, компонент, средство, этап и т.д.» должны интерпретироваться открыто, как относящиеся к по меньшей мере одному образцу элемента, устройства, компонента, средства, этапа и т.д., если явно не указано иное. Этапы любого способа, раскрытого в данном документе, не должны выполняться в точном раскрытом порядке, если явно не указано иное.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Идея изобретения теперь описана в качестве примера со ссылкой на сопровождающие чертежи, на которых:
Фиг. 1 схематично иллюстрирует азимутальное подруливающее устройство согласно варианту выполнения;
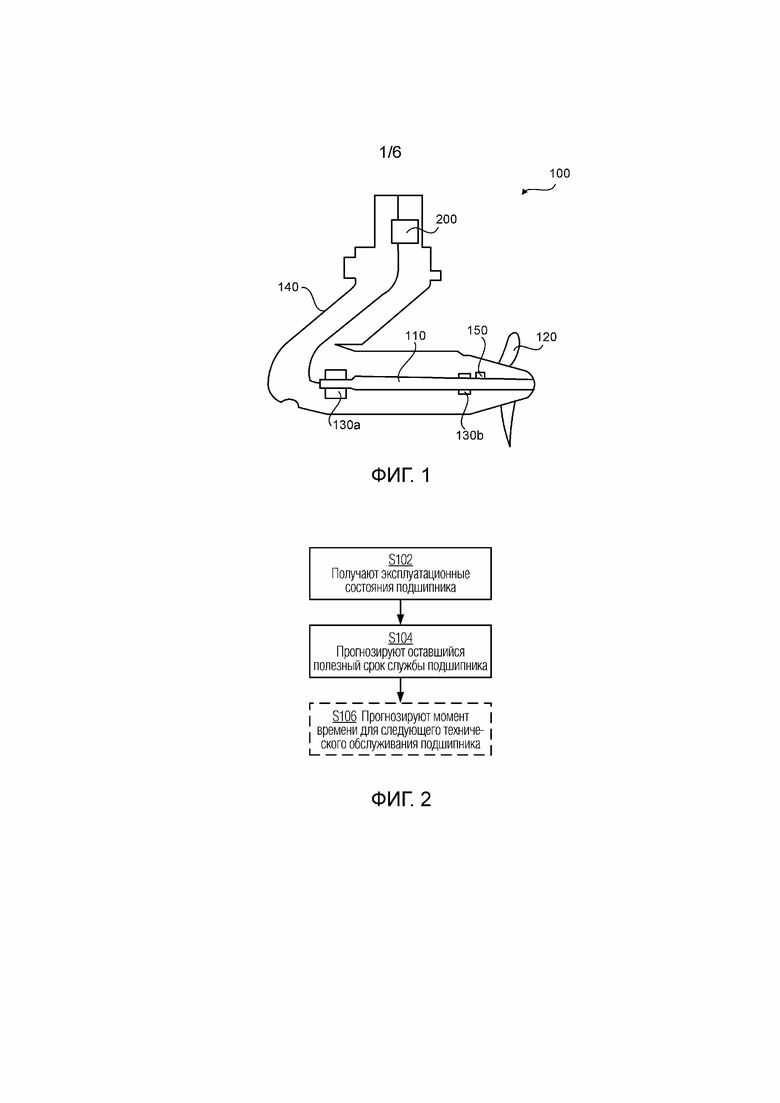
Фиг. 2 представляет собой блок-схему способов согласно вариантам выполнения;
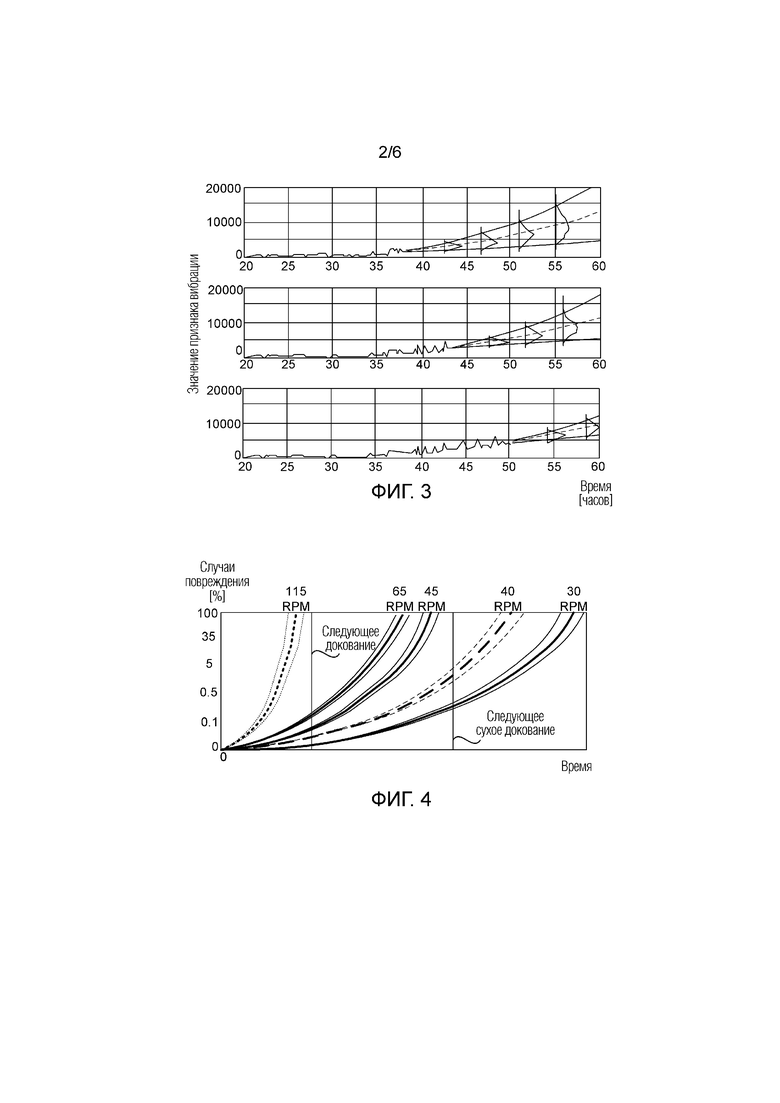
Фиг. 3 схематично иллюстрирует прогнозирование оставшегося полезного срока службы согласно варианту выполнения;
Фиг. 4 схематично иллюстрирует оценку износа подшипника азимутального подруливающего устройства в гондоле согласно варианту выполнения;
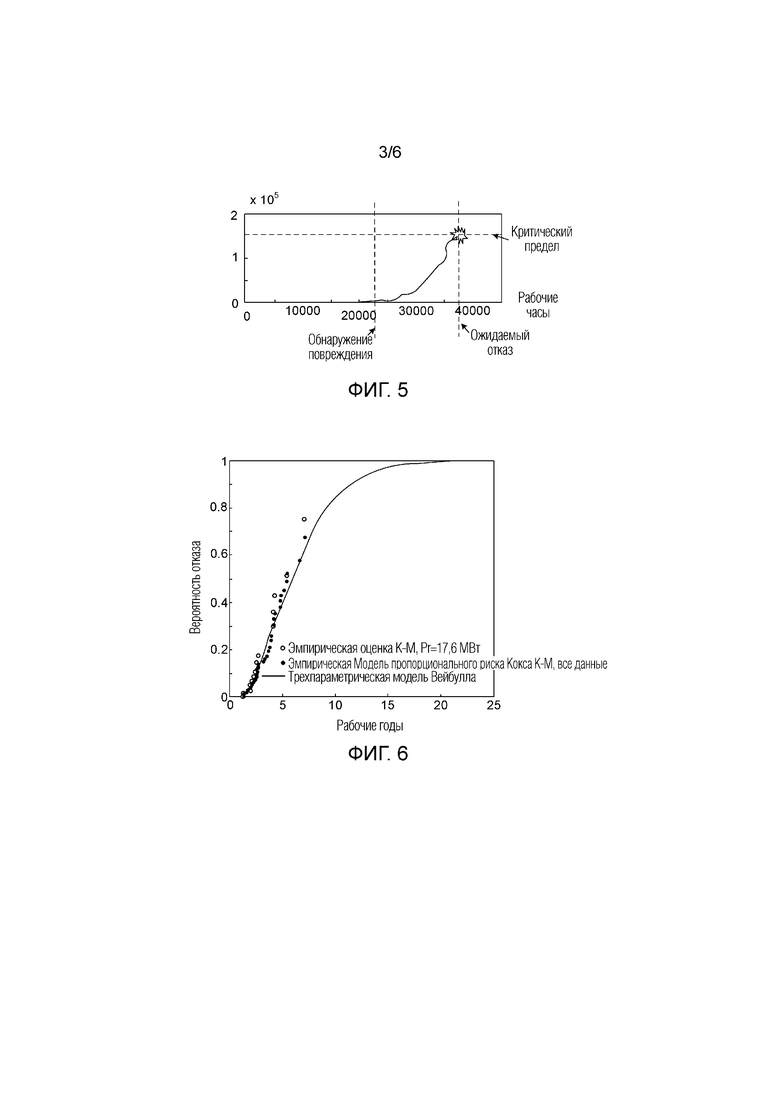
Фиг. 5 схематично иллюстрирует разделение моделирования срока службы на два периода согласно варианту выполнения;
Фиг. 6 схематично иллюстрирует сравнение между кумулятивным распределением вероятности на основе данных истории по сравнению с прогнозируемой моделью согласно варианту выполнения;
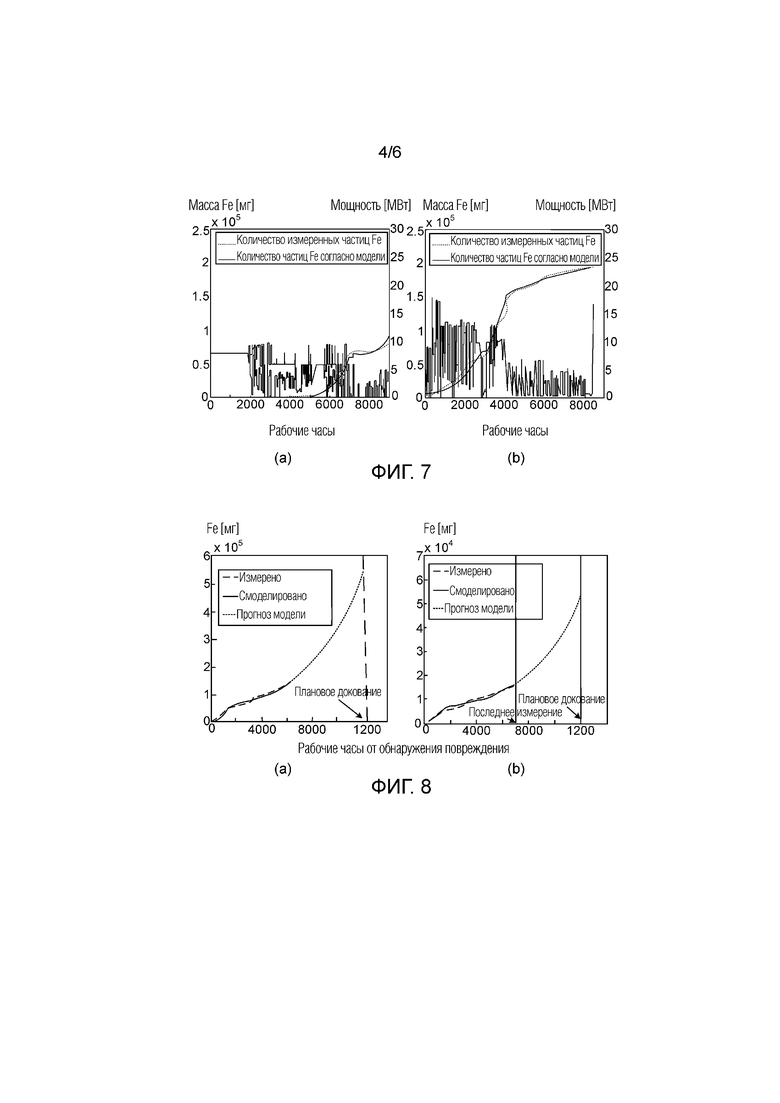
Фиг. 7 схематично иллюстрирует измеренную и оцененную массу Fe как функцию рабочего времени и состояний согласно варианту выполнения;
Фиг. 8 схематично иллюстрирует прогнозирование распространения повреждения на основе результатов подсчета частиц Fe из текущих случаев повреждения согласно варианту выполнения;
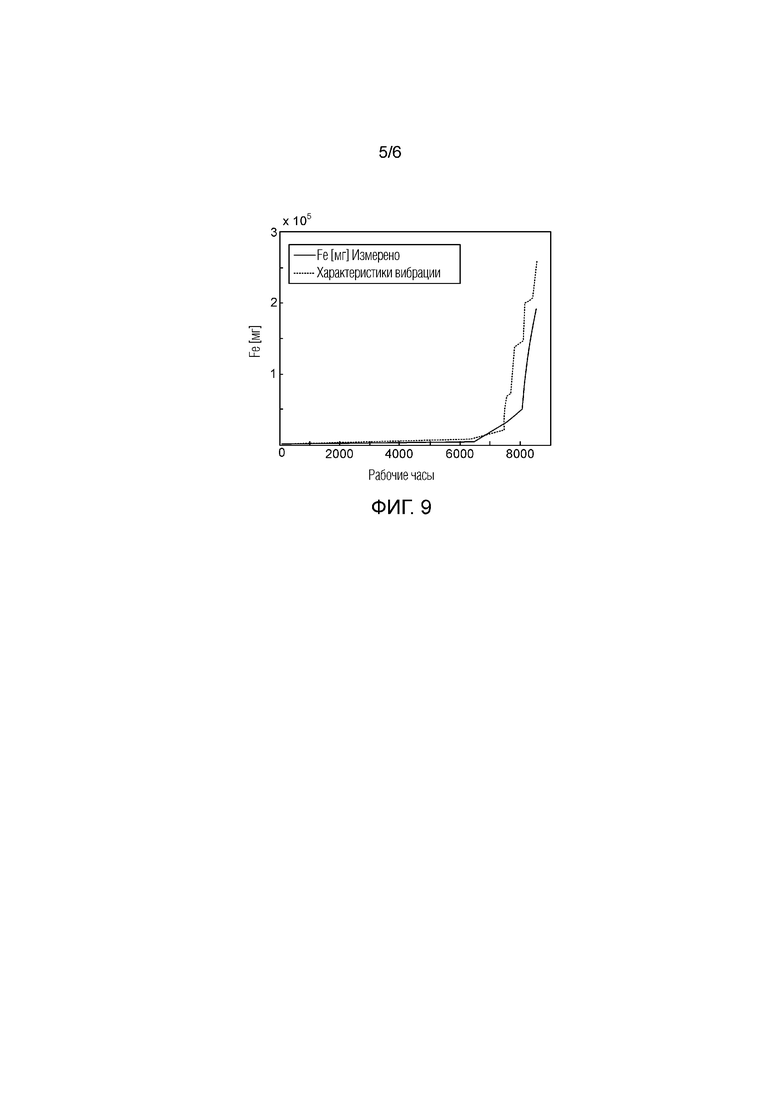
Фиг. 9 схематически иллюстрирует корреляцию между прогнозированием распространения повреждения на основе вибрации, а также модели подсчета частиц согласно варианту выполнения;
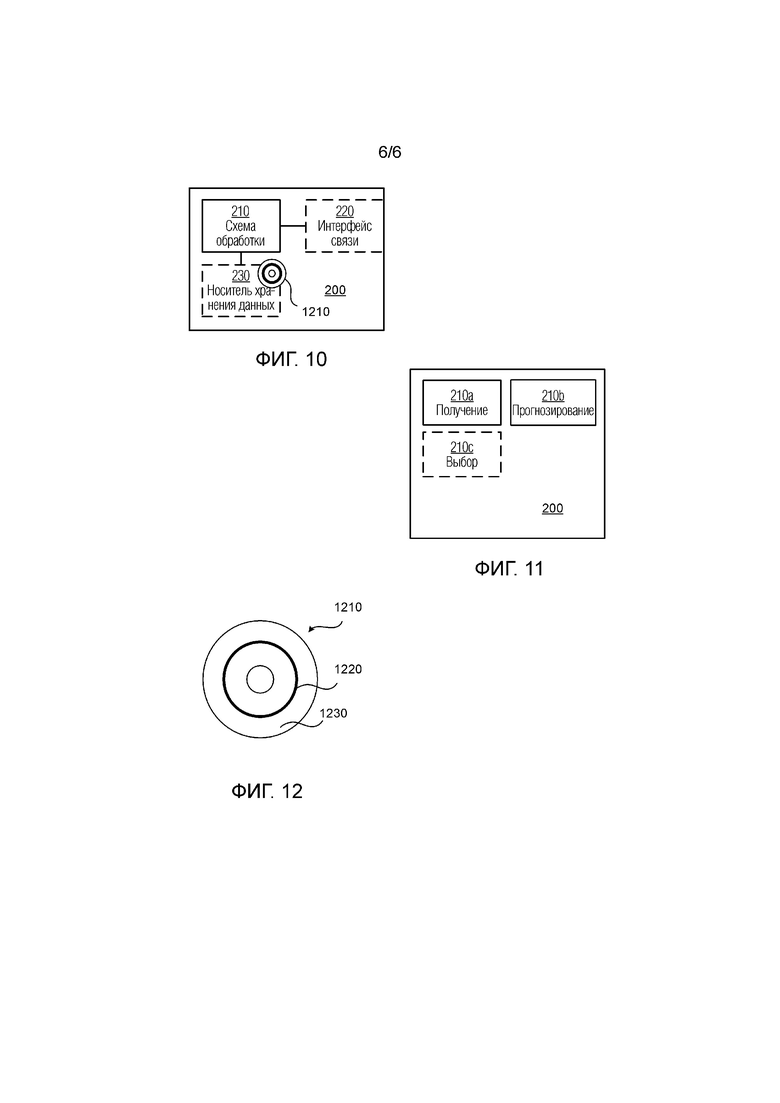
Фиг. 10 представляет собой блок-схему, показывающую функциональные блоки контроллера согласно варианту выполнения;
Фиг. 11 представляет собой блок-схему, показывающую функциональные модули контроллера согласно варианту выполнения; и
Фиг. 12 показывает один пример компьютерного программного продукта, содержащего машиночитаемый носитель хранения данных согласно варианту выполнения.
ПОДРОБНОЕ ОПИСАНИЕ
Идея изобретения теперь будет описана более полно со ссылкой на сопровождающие чертежи, на которых показаны определенные варианты выполнения идеи изобретения. Эта идея изобретения, однако, может быть воплощена во многих различных формах и не должна рассматриваться как ограниченная вариантами выполнения, изложенными здесь; скорее, эти варианты выполнения приведены в качестве примера, так что это раскрытие будет тщательным и полным и полностью передаст объем идеи изобретения специалистам в данной области техники. Подобные ссылочные позиции относятся к подобным элементам во всем описании. Любой этап или признак, проиллюстрированный пунктирными линиями, следует рассматривать как возможный.
На практике истинный срок службы компонента, вероятно, будет стохастическим по своей природе. В результате для разработки надлежащих способов прогнозирования может потребоваться большое количество натурных данных. Во многих случаях такие данные не доступны. Раскрытые выше азимутальные подруливающие устройства являются исключением из этого наблюдения; системы были хорошо оснащены оборудованием для мониторинга состояний и дополнительно для анализа доступен большой объем данных о надежности. Это позволяет разрабатывать передовые способы прогнозирования для оценки оставшегося срока службы подшипников.
Фиг. 1 представляет собой схематичную иллюстрацию азимутального подруливающего устройства 100 согласно варианту выполнения. Азимутальное подруливающее устройство 100 является электрическим азимутальным подруливающим устройством 100 в гондоле и содержит гребной вал 110, на котором обеспечены лопатки 120 винта. Гребной вал 110 поддерживается по меньшей мере одним подшипником 130a, 130b. Внутренняя часть азимутального подруливающего устройства 100 заключена в водонепроницаемую обшивку или корпус 140. Контроллер 200 обеспечен для прогнозирования оставшегося полезного срока службы подшипника 130a, 130b и получает эксплуатационные состояния подшипника 130a, 130b, как обеспечено датчиками 150.
Раскрытые здесь варианты выполнения особенно касаются механизмов для прогнозирования оставшегося полезного срока службы подшипника 130a, 130b электрического азимутального подруливающего устройства 100 в гондоле. Для получения таких механизмов обеспечен контроллер 200, способ, выполняемый контроллером 200, компьютерный программный продукт, содержащий код, например, в форме компьютерной программы, которая при запуске на контроллере 200 заставляет контроллер 200 выполнять способ.
Фиг. 2 представляет собой блок-схему, иллюстрирующую варианты выполнения способов прогнозирования оставшегося полезного срока службы подшипника 130a, 130b электрического азимутального подруливающего устройства 100 в гондоле. Способы выполняются контроллером 200. Способы предпочтительно обеспечены в виде компьютерных программ 1220.
Раскрытые здесь варианты выполнения позволяют интегрировать данные, собранные из разных источников вокруг подшипника 130a, 130b, для прогнозирования оставшегося полезного срока службы подшипника 130a, 130b. Следовательно, контроллер 200 выполнен с возможностью выполнять этап S102:
S102: Контроллер 200 получает эксплуатационные состояния подшипника 130a, 130b.
Могут потребоваться различные типы моделей срока службы в зависимости от этапа жизненного цикла подшипника 130a, 130b, а также могут потребоваться различные способы диагностики для обнаружения изменения одного этапа жизненного цикла на другой. По меньшей мере некоторые из раскрытых здесь вариантов выполнения основаны на том, что до обнаружения повреждения сигналы мониторинга состояний и способы не обеспечивают никакой информации, которая может использоваться для моделирования срока службы подшипника 130a, 130b, тогда как после обнаружения повреждения информация мониторинга может быть использована для получения более точных прогнозов. Поэтому варианты выполнения, раскрытые в данном документе, основаны на делении срока службы подшипника 130a, 130b на три отдельные фазы. Отдельные модели затем используют на каждой фазе для прогнозирования оставшегося полезного срока службы подшипника 130a, 130b. Следовательно, контроллер 200 выполнен с возможностью выполнять этап S104:
S104: Контроллер 200 прогнозирует оставшийся полезный срок службы подшипника 130a, 130b с использованием эксплуатационных состояний. Срок службы подшипника 130a, 130b делят на три отдельных фазы. Оставшийся полезный срок службы подшипника 130a, 130b прогнозируют по-разному на трех отдельных фазах.
Это позволяет использовать самоадаптирующуюся и/или самосовершенствующуюся модель, точность которой непрерывно улучшается по мере получения большего количества данных и информации для использования при прогнозировании оставшегося полезного срока службы, см. Фиг. 3, которая схематично иллюстрирует прогнозирование оставшегося полезного срока службы, в котором точность оценок улучшается со временем.
Теперь будут раскрыты варианты выполнения, относящиеся к дополнительным деталям прогнозирования оставшегося полезного срока службы подшипника 130a, 130b электрического азимутального подруливающего устройства 100 в гондоле, которые выполняются контроллером 200.
Оставшийся полезный срок службы подшипника 130a, 130b можно прогнозировать с использованием эксплуатационных данных и сигналов мониторинга состояний. Следовательно, согласно варианту выполнения, оставшийся полезный срок службы подшипника 130a, 130b прогнозируют с использованием сигналов мониторинга состояний. Существуют различные примеры сигналов мониторинга состояний. Согласно варианту выполнения, сигналы мониторинга состояний относятся к по меньшей мере одному из следующего: к металлическим частицам в смазочном материале подшипника, к вибрации, к акустической эмиссии и к температуре.
Могут иметься различные примеры трех отдельных фаз. Согласно варианту выполнения, три отдельные фазы включают в себя фазу предыстории, фазу обнаружения момента повреждения и фазу поврежденного подшипника. Фаза предыстории возникает до обнаружения повреждения. Фаза повреждения подшипника возникает после обнаружения повреждения.
Таким образом, период до обнаружения повреждения начинается с момента, когда подшипник установлен и заканчивается при обнаружении повреждения. Данные предыстории могут быть смоделированы на основе подхода функции пропорционального риска Кокса, примененного к трехпараметрической модели Вейбулла. То есть, согласно варианту выполнения, данные предыстории используются во время фазы предыстории для прогнозирования оставшегося полезного срока службы подшипника 130a, 130b согласно модели, основанной на подходе функции пропорционального риска Кокса, примененного к трехпараметрической модели Вейбулла.
Период после обнаружения повреждения начинается естественным образом от обнаружения повреждения и заканчивается при отказе подшипника. Прогноз оставшегося полезного срока службы во время этого периода может основываться на признаках, извлеченных из нескольких показательных сигналов, таких как сигналы вибрации и результаты анализа масла. Иными словами, согласно варианту выполнения, прогноз оставшегося полезного срока службы подшипника во время фазы поврежденного подшипника основан на признаках, извлеченных из нескольких показательных сигналов, таких как сигналы вибрации и результаты анализа масла.
Прогнозируемое техническое обслуживание может быть использовано для повышения вероятности сохранения работоспособности до следующего запланированного сухого докования, особенно в случае возникновения повреждения подшипника. Сегодня эту проблему решают с использованием данных из разных источников, которые анализируют в основном на основе экспертных знаний и рекомендаций. Согласно вариантам выполнения, раскрытым в данном документе, точную оценку оставшегося полезного срока службы в зависимости от эксплуатационных состояний, как описано выше, используют в качестве входных данных для оптимизации технического обслуживания и планирования сухого докования, включающих в себя рекомендацию оптимальных эксплуатационных состояний для уменьшения риска незапланированных остановок с минимальным влиянием на запланированную работу и расписание, см. Фиг. 4. Фиг. 4 показывает иллюстрацию сценария, в котором на наклон распространения повреждения можно влиять путем изменения скорости вращения (измеряемой в кругах в минуту; RPM) винта электрического азимутального подруливающего устройства 100 в гондоле. Для каждого значения RPM задают допустимый предел для случаев повреждения. Для каждого значения RPM допустимый предел увеличивается с увеличением времени.
Следовательно, согласно варианту выполнения, контроллер 200 выполнен с возможностью выполнять этап S106:
S106: Контроллер 200 выбирает момент времени для следующего технического обслуживания подшипника 130a, 130b, используя прогнозируемый оставшийся полезный срок службы подшипника 130a, 130b. Это возможно благодаря такой адаптации рабочей скорости, которая оптимизирует оставшийся полезный срок службы подшипника 130a, 130b таким образом, чтобы всегда можно было достигать следующего возможного/запланированного сухого докования/планового технического обслуживания.
Теперь будут раскрыты дополнительные аспекты, применимые к вышеупомянутым вариантам выполнения для прогнозирования оставшегося полезного срока службы подшипника 130a, 130b электрического азимутального подруливающего устройства 100 в гондоле, которые выполняются контроллером 200.
Обнаружение повреждения делит моделирование срока службы на два периода. Фиг. 5 представляет собой иллюстрацию такого подхода. Первая модель разработана для прогнозирования оставшегося полезного срока службы подшипника 130a, 130b во время периода нормального состояния (до обнаружения повреждения) на основе истории неисправности, когда способы мониторинга состояния (CM) не указывают на повреждение. Вторая модель разработана для прогнозирования оставшегося полезного срока службы подшипника 130a, 130b на основе различных измерений и анализа, такого как результаты анализа масла, измерения вибрации, акустическая эмиссия и т.д. во время периода, когда способы мониторинга состояния указывают на повреждение. Первую модель и вторую модель затем объединяют. Перед обнаружением повреждения модель калибруют на основании истории отказа.
Теперь будут раскрыты аспекты модели, основанные на истории отказов. Согласно примеру обеспечена трехпараметрическая модель пропорциональной степени риска, содержащая базовую степень риска  и функциональный срок
и функциональный срок  , который включает вектор ковариатов (номинальная мощность).
, который включает вектор ковариатов (номинальная мощность).
Режим степени риска определяют следующим образом:

Соответствующая функция плотности вероятности:
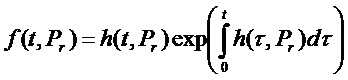
где функциональный срок определяют, как функцию от рабочего параметра номинальной мощности  , и где
, и где

Фиг. 6 показывает сравнение между кумулятивным распределением вероятности на основе данных истории и моделью прогнозируемого риска.
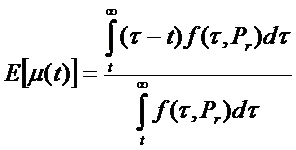
Затем эту модель используют для оценки оставшегося полезного срока службы с целью оптимизации общего планирования технического обслуживания или других целей.
Тогда RUL в момент времени t вычисляют как:
Теперь будут представлены аспекты прогнозирования RUL на основе анализа масла. Рассмотрим тип пространства состояний модели:
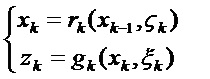
Где  это функция k-того состояния и
это функция k-того состояния и  - это функция измерения. Согласно варианту выполнения функция состояния представляет собой функцию
- это функция измерения. Согласно варианту выполнения функция состояния представляет собой функцию  кумулятивного повреждения, которая зависит от эксплуатационных данных и определяется как:
кумулятивного повреждения, которая зависит от эксплуатационных данных и определяется как:
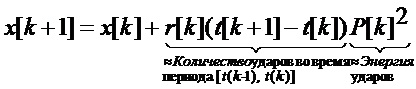
где r - это скорость вращения, где t - это количество рабочих часов, и где P - это мощность.
Функция измерения соответствует подсчитанному количеству частиц Fe в масле, которое описывается как экспоненциальная функция кумулятивного повреждения; 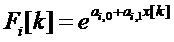 , где
, где  и
и  являются стохастическими параметрами.
являются стохастическими параметрами.
Два примера на Фиг. 7 (а) и (б) показывают, насколько хорошо модель собирает данные о влиянии эксплуатационных состояний. Третья ось на Фиг. 7 (а) и (б) изображает фактическую потребляемую мощность. Распространение повреждения уменьшается с уменьшением потребления мощности.
Таким образом, оставшийся полезный срок службы оценивают с использованием прогнозируемых эксплуатационных данных и уравнения состояния. Чтобы количественно оценивать ограничение наклона кривой распространения повреждения, используют время до следующего предстоящего технического обслуживания в зависимости от максимального размера частицы Fe, см. Фиг. 8. Фиг. 8 иллюстрирует прогнозирование распространения повреждения на основе результатов подсчета частиц Fe из текущих случаев повреждения. В этом случае соответствующая масса максимально допустимого количества подсчитанных частиц составляет около 150 000 мг. Фиг. 8 включает в себя доверительный интервал прогнозирования.
Теперь будут раскрыты аспекты сигнала вибрации. Как видно из описанного подхода, обнаружение самого момента повреждения имеет важное значение для точности рассматриваемой модели. Использование сигнала вибрации повышает надежность модели благодаря более раннему обнаружению появления повреждения, чем использование подсчета частиц в масле.
Кроме того, использование вибрационного сигнала может улучшать модель RUL, основанную на подсчете частиц. Хотя подсчет частиц является одним из наиболее надежных путей оценки серьезности повреждения, во многих сценариях подсчет частиц недоступен или слишком дорог, и поэтому модель калиброванного RUL, основанная на различных сигналах, повысит точность моделей оставшегося полезного срока службы.
Фиг. 9 показывает корреляцию между прогнозированием распространения повреждения на основе вибрации, а также подсчет частиц согласно иллюстративному примеру; В этом иллюстративном примере повреждение было обнаружено с помощью сигналов вибрации за один месяц до образования металлических частиц из-за повреждения в смазочном материале. Изменения наклона функции распространения собирают намного раньше с использованием вибрационных характеристик.
Вибрационные характеристики в этом иллюстративном примере извлекают с использованием энергии импульсов, генерируемых повреждением в подшипнике, причем импульсы должным образом масштабируют и интегрируют. Таким образом, чтобы иметь надежный способ RUL, было бы полезно объединять различные показатели; подсчет частиц для ее способности оценивать серьезность повреждения и вибрацию для сбора данных о различных фазах роста на ранней стадии. Добавление дополнительных сигналов к уже разработанной модели может еще больше повысить надежность прогноза. Здесь могут быть использованы способы, основанные на машинном обучении (ML).
Фиг. 10 схематично иллюстрирует, выраженные в количестве функциональных блоков, компоненты контроллера 200 согласно варианту выполнения. Схему 210 обработки обеспечивают, используя любую совокупность одного или нескольких подходящих центральных процессоров (CPU), мультипроцессора, микроконтроллера, процессора цифровых сигналов (DSP) и т.д., способных исполнять программные инструкции, хранящиеся в компьютерном программном продукте 1210 (как на Фиг. 12), например, в виде носителя 230 хранения данных. Схема 210 обработки может быть дополнительно обеспечена как по меньшей мере одна специализированная интегральная схема (ASIC) или перепрограммируемая пользователем компонента массива (FPGA).
В частности, схема 210 обработки выполнена с возможностью заставлять контроллер 200 выполнять набор операций или этапов S102-S106, как раскрыто выше. Например, носитель 230 хранения данных может хранить набор операций, и схема 210 обработки может быть выполнена с возможностью извлекать набор операций из носителя 230 хранения данных, чтобы заставить контроллер 200 выполнять набор операций. Набор операций может быть обеспечен в виде набора исполняемых инструкций.
Таким образом, схема 210 обработки, при этом выполнена с возможностью исполнять способы, как раскрыто в данном документе. Носитель 230 хранения данных может также содержать постоянное хранилище, которое, например, может быть любой единичной или совокупностью магнитной памяти, оптической памяти, твердотельной памяти или даже удаленно установленной памяти. Контроллер 200 может дополнительно содержать интерфейс 220 связи по меньшей мере выполненный с возможностью связываться с датчиками 150. По существу, интерфейс 220 связи может содержать один или несколько передатчиков и приемников, содержащих аналоговые и цифровые компоненты. Схема 210 обработки управляет общей работой контроллера 200, например, отправкой данных и сигналов управления на интерфейс 220 связи и носитель 230 хранения данных приемом данных и отчетов из интерфейса 220 связи и извлечением данных и инструкций из носителя 230 хранения данных. Другие компоненты, а также соответствующие функциональные возможности контроллера 200 опущены, чтобы не затруднять понимание представленных здесь идей.
Фиг. 11 схематично иллюстрирует, выраженные в количестве функциональных модулей, компоненты контроллера 200 согласно варианту выполнения. Контроллер 200 по Фиг. 11 содержит несколько функциональных модулей; причем модуль 210a получения выполнен с возможностью выполнять этап S102, а модуль 210b прогнозирования выполнен с возможностью выполнять этап S104. Контроллер 200 по Фиг. 11 может дополнительно содержать ряд возможных функциональных модулей, таких как модуль 210c выбора, выполненный с возможностью выполнять этап S106. В общих чертах, каждый функциональный модуль 210a-210c может в одном варианте выполнения быть реализован только аппаратно или в другом варианте выполнения с помощью программного обеспечения, т.е. последний вариант выполнения имеет инструкции компьютерной программы, хранящиеся на носителе 230 хранения данных, которые при запуске на схеме обработки заставляет контроллер 200 выполнять соответствующие этапы, упомянутые выше в связи с Фиг. 2. Следует также отметить, что, хотя модули соответствуют частям компьютерной программы, здесь они не обязательно должны быть отдельными модулями, но способ их реализации в программном обеспечении зависит от используемого языка программирования. Предпочтительно один или несколько или все функциональные модули 210a-210c могут быть реализованы схемой 210 обработки, возможно, во взаимодействии с функциональными блоками 220 и/или 230. Схема 210 обработки, таким образом, может быть выполнена с возможностью извлекать инструкции из носителя 230 хранения данных, обеспеченные функциональным модулем 210a-210c, и исполнять эти инструкции, тем самым выполняя любые этапы, как раскрыто в данном документе.
Контроллер 200 может быть обеспечен в виде отдельного устройства или как часть по меньшей мере одного дополнительного устройства. Например, контроллер 200 может быть обеспечен в азимутальном подруливающем устройстве 100. Таким образом, первый участок инструкций, выполняемых контроллером 200, может быть исполнен в первом устройстве, а второй участок инструкций, выполняемых контроллером 200, может быть исполнен во втором устройстве; раскрытые здесь варианты выполнения не ограничены каким-либо особым количеством устройств, на которых могут исполняться инструкции, выполняемые контроллером 200. Следовательно, способы согласно раскрытым в данном документе вариантам выполнения пригодны для выполнения контроллером 200, находящимся в облачной вычислительной среде. Следовательно, хотя единственная схема 210 обработки проиллюстрирована на Фиг. 10, схема 210 обработки может быть распределена среди множества устройств или узлов. То же самое применяется к функциональным модулям 210a-210c по Фиг. 11 и компьютерной программе 1220 по Фиг. 12.
Фиг. 12 показывает один пример компьютерного программного продукта 1210, содержащего машиночитаемый носитель 1230 хранения данных. На этом машиночитаемом носителе 1230 хранения данных может быть сохранена компьютерная программа 1220, причем эта компьютерная программа 1220 может заставлять схему 210 обработки и функционально связанные объекты и устройства, такие как интерфейс 220 связи и носитель 230 хранения данных, исполнять способы согласно вариантам выполнения, описанным здесь. Таким образом, компьютерная программа 1220 и/или компьютерный программный продукт 1210 могут обеспечивать средства для выполнения любых этапов, как раскрыто в данном документе.
В примере на Фиг. 12 компьютерный программный продукт 1210 проиллюстрирован в виде оптического диска, такого как CD (компакт-диск) или DVD (цифровой универсальный диск) или Blu-Ray-диск. Компьютерный программный продукт 1210 также может быть выполнен в виде памяти, такой как запоминающее устройство с произвольной выборкой (RAM), постоянное запоминающее устройство (ROM), стираемое программируемое постоянное запоминающее устройство (EPROM) или электрически стираемое программируемое постоянное запоминающее устройство (EEPROM) и, более конкретно, как энергонезависимый носитель хранения данных устройства во внешней памяти, такой как USB (Универсальная Последовательная Шина) или флэш-память, такая как компактная флэш-память. Таким образом, хотя компьютерная программа 1220 здесь схематично показана в виде дорожки на изображенном оптическом диске, компьютерная программа 1220 может быть сохранена любым способом, который подходит для компьютерного программного продукта 1210.
Идея изобретения была в основном описана выше со ссылкой на несколько вариантов выполнения. Тем не менее, как понятно специалисту в данной области техники, другие варианты выполнения, помимо раскрытых выше, в равной степени возможны в рамках идеи изобретения, как определено в прилагаемой формуле изобретения.
Изобретение относится к измерительной технике и может быть использовано для прогнозирования оставшегося полезного срока службы подшипника. Обеспечен механизм прогнозирования оставшегося полезного срока службы подшипника электрического азимутального подруливающего устройства в гондоле. Способ выполняется контроллером. Способ содержит этап, на котором получают эксплуатационные состояния подшипника. Способ содержит этап, на котором прогнозируют оставшийся полезный срок службы подшипника с использованием эксплуатационных состояний. Срок службы подшипника делят на три отдельных фазы. Оставшийся полезный срок службы подшипника прогнозируют по-разному на трех отдельных фазах. Технический результат заключается в обеспечении эффективного и точного прогнозирования оставшегося полезного срока службы подшипника. 4 н. и 10 з.п. ф-лы, 12 ил.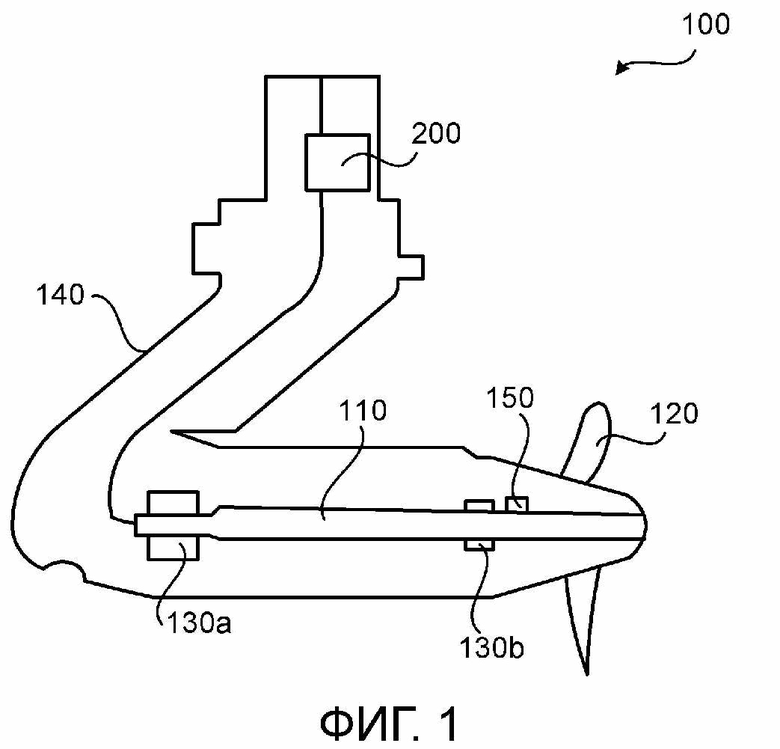
1. Способ прогнозирования оставшегося полезного срока службы подшипника (130a, 130b) электрического азимутального подруливающего устройства (100) в гондоле, причем способ выполняется контроллером (200), причем способ содержит этапы, на которых:
получают (S102) эксплуатационные состояния подшипника (130a, 130b); и
прогнозируют (S104) оставшийся полезный срок службы подшипника (130a, 130b) с использованием эксплуатационных состояний, при этом срок службы подшипника (130a, 130b) делят на три отдельные фазы, и при этом оставшийся полезный срок службы подшипника (130a, 130b) прогнозируют по-разному на трех отдельных фазах.
2. Способ по п. 1, в котором оставшийся полезный срок службы подшипника (130a, 130b) прогнозируют с использованием сигналов мониторинга состояний.
3. Способ по п. 1, в котором сигналы мониторинга состояний относят к по меньшей мере одному из следующего: к числу металлических частиц в смазочном материале подшипника, к вибрации, к акустической эмиссии и к температуре.
4. Способ по п. 1, в котором три отдельные фазы включают в себя фазу предыстории, фазу обнаружения момента повреждения и фазу поврежденного подшипника.
5. Способ по п. 4, в котором фаза предыстории возникает до обнаружения повреждения.
6. Способ по п. 4, в котором фаза повреждения подшипника возникает после обнаружения повреждения.
7. Способ по п. 4, в котором данные предыстории используют во время фазы предыстории для прогнозирования оставшегося полезного срока службы подшипника (130a, 130b) согласно модели, основанной на подходе функции пропорционального риска Кокса, примененного к трехпараметрической модели Вейбулла.
8. Способ по п. 4, в котором во время фазы повреждения подшипника прогноз оставшегося полезного срока службы подшипника (130а, 130b) основывают на признаках, извлеченных из сигналов вибрации и/или результатов анализа масла.
9. Способ по п. 1, дополнительно содержащий этап, на котором:
выбирают (S106) момент времени для следующего технического обслуживания подшипника (130a, 130b), используя прогнозируемый оставшийся полезный срок службы подшипника (130a, 130b).
10. Контроллер (200) для прогнозирования оставшегося полезного срока службы подшипника (130a, 130b) электрического азимутального подруливающего устройства (100) в гондоле, причем контроллер (200) содержит схему (210) обработки, причем схема обработки выполнена с возможностью побуждать контроллер (200):
получать эксплуатационные состояния подшипника (130a, 130b); и
прогнозировать оставшийся полезный срок службы подшипника (130a, 130b) с использованием эксплуатационных состояний, при этом срок службы подшипника (130a, 130b) делят на три отдельные фазы, и при этом оставшийся полезный срок службы подшипника (130a, 130b) прогнозируют по-разному на трех отдельных фазах.
11. Контроллер (200) по п. 10, в котором схема обработки выполнена с возможностью побуждать контроллер (200):
прогнозировать момент времени для следующего технического обслуживания подшипника (130a, 130b), используя прогнозируемый оставшийся полезный срок службы подшипника (130a, 130b).
12. Контроллер (200) для прогнозирования оставшегося полезного срока службы подшипника (130a, 130b) электрического азимутального подруливающего устройства (100) в гондоле, причем контроллер (200) содержит:
модуль (210a) получения, выполненный с возможностью получать эксплуатационные состояния подшипника (130a, 130b); и
модуль (210b) прогнозирования оставшегося полезного срока службы подшипника (130a, 130b) с использованием эксплуатационных состояний, при этом срок службы подшипника (130a, 130b) делят на три отдельные фазы, и при этом оставшийся полезный срок службы подшипника (130a, 130b) прогнозируют по-разному на трех отдельных фазах.
13. Контролер (200) по п. 12, дополнительно содержащий:
модуль (210c) прогнозирования, выполненный с возможностью прогнозировать момент времени для следующего технического обслуживания подшипника (130a, 130b), используя прогнозируемый оставшийся полезный срок службы подшипника (130a, 130b).
14. Машиночитаемый носитель (1230) хранения данных, на котором хранится компьютерная программа (1220) для прогнозирования оставшегося полезного срока службы подшипника (130a, 130b) электрического азимутального подруливающего устройства (100) в гондоле, причем компьютерная программа содержит компьютерный код, который при запуске на схеме (210) обработки контроллера (200), побуждает контроллер (200):
получать (S102) эксплуатационные состояния подшипника (130a, 130b); и
прогнозировать (S104) оставшийся полезный срок службы подшипника (130a, 130b) с использованием эксплуатационных состояний, при этом срок службы подшипника (130a, 130b) делят на три отдельные фазы, и при этом оставшийся полезный срок службы подшипника (130a, 130b) прогнозируют по-разному на трех отдельных фазах.
| US 2011040495 A1 17.02.2011 | |||
| US 2016195453 A1 07.07.2016 | |||
| US 2007277613 A1 06.12.2007 | |||
| Устройство для виброакустической диагностики подшипников качения | 1985 |
|
SU1295261A1 |

