Настоящее изобретение относится к системе управления грузовым поездом с множеством локомотивов.
В частности, изобретение относится к системе управления, принадлежащей к типу, описание которого приведено во вводной части прилагаемого пункта 1 формулы изобретения.
В контексте Европейских стран грузовой поезд обычно содержит множество вагонов во главе с локомотивом. Максимальная длина поезда этого типа определена Европейским органом, регулирующим стандарты МСЖД (Международный союз железных дорог) на основании функциональных характеристик тормозной системы, которые также регулируются этим органом.
Чтобы облегчить понимание настоящего изобретения будут пересмотрены некоторые основы системы торможения железнодорожного транспорта известного уровня техники.
Локомотив обычно оснащен устройством, а именно тормозным клапаном или краном, с помощью которого машинист может регулировать пневматическое давление в тормозном воздухопроводе, протянутом от локомотива по всему поезду до последнего вагона.
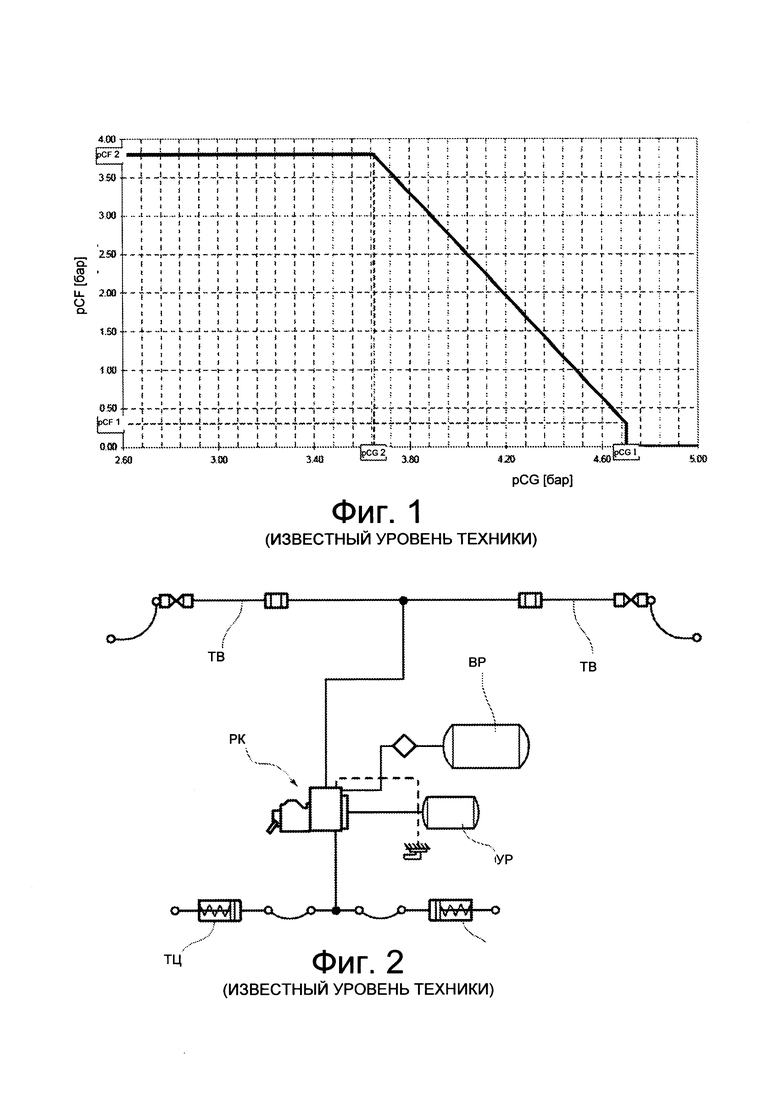
Тормозной воздухопровод служит для снабжения и управления всеми локальными тормозными устройствами в каждом вагоне поезда. В соответствии со стандартами МСЖД для тормозного воздухопровода, как показано на графике на Фиг. 1, демонстрирующем соотношение тормозного давления pCF в тормозных цилиндрах и давления pCG в тормозном воздухопроводе, давление в воздухопроводе может иметь номинальное рабочее значение в диапазоне от 3,5 бар до 5 бар: значение 3,5 бар соответствует полному торможению поезда, 5 бар - нулевому торможения поезда, а промежуточные значения давления (от 3,5 до 5 бар) соответствуют тормозным усилиям поезда, пропорционально уменьшающимся от полного до нулевого торможения.
При первоначальной активации тормозной системы снижение тормозного давления обычно осуществляется посредством первого отрицательного «перепада» давления 0,5 бар при довольно большом приращении времени Δp/Δt по сравнению с последующим изменением упомянутого давления. Этот перепад давления распространяется в тормозном воздухопроводе как звуковая волна со скоростью, близкой к скорости звука в воздухе. Во время распространения в воздухопроводе амплитуда упомянутого отрицательного перепада давления уменьшается из-за фрикционных помех между воздухом и стенками, изгибами воздухопровода.
Дальнейшее снижение давления в воздухопроводе с 3,5 бар до 0 бар соответствует полной откачке воздуха, которая имеет место при экстренном торможении: это условие позволяет осуществить максимально быструю откачку воздуха из воздухопровода, что соответствует наиболее быстрому применению тормозной системы.
Каждый вагон поезда оборудован тормозным устройством, известным как распределительный клапан, выполненным с возможностью осуществления определенных функций, описание которых приводится ниже.
На Фиг. 2 показана пневматическая схема тормозной системы стандартного вагона поезда: распределительный клапан РК, соединенный с тормозным воздухопроводом ТВ и уравнительным резервуаром УР, подает тормозное давление на тормозные цилиндры ТЦ, перегоняющие воздух, хранящийся во вспомогательном резервуаре BP под давлением 5 бар, согласно графику на Фиг. 1.
Распределительный клапан РК имеет следующие три основные функции:
- активация и дезактивация тормозного усилия вагона в соответствии с изменениями давления в тормозном воздухопроводе ТВ и согласно передаточной функции, приведенной на Фиг. 1;
- пополнение вспомогательного резервуара BP: когда после активации тормозной системы давление в этом резервуаре ниже давления в тормозном воздухопроводе ТВ, распределительный клапан РК переходит в режим подачи воздуха из воздухопровода ТВ во вспомогательный резервуар BP пока давление в них не станет равным; поэтому, когда от ведущего локомотива поезда идет команда на полное удаление воздуха из тормозной системы поезда посредством распределительного клапана РК, последний восстанавливает давление в воздухопроводе ТВ до 5 бар, а распределительные клапаны вагонов, в свою очередь, увеличивают давление в соответствующих вспомогательных резервуарах BP до 5 бар, тем самым выравнивая давление в воздухопроводе ТВ; таким образом, время, затрачиваемое на полное удаление воздуха из тормозной системы поезда, по существу, равно времени, затрачиваемому на полное заполнение всех вспомогательных резервуаров BP до достижения давления 5 бар;
- восстановление и распространение первого перепада давления 0,5 бар: распределительный клапан РК обладает способностью обнаруживать наличие в воздухопроводе ТВ градиента Δp/Δt, характерного для первого перепада торможения, даже если его начальная амплитуда 0,5 бар частично ослабляется в результате распространения в тормозном воздухопроводе ТВ; когда обнаружено присутствие этого градиента Δp/Δt, распределительный клапан РК мгновенно удаляет заданное количество воздуха из воздухопровода ТВ, так что перепад давления немедленно восстанавливается до номинального 0,5 бар; таким образом, перепад давления восстанавливается и распространяется по направлению к распределительному клапану следующего вагона поезда; эта последовательность событий протекает быстро, тем самым предотвращая любую общую задержку в распространении упомянутого перепада давления по тормозному воздухопроводу ТВ.
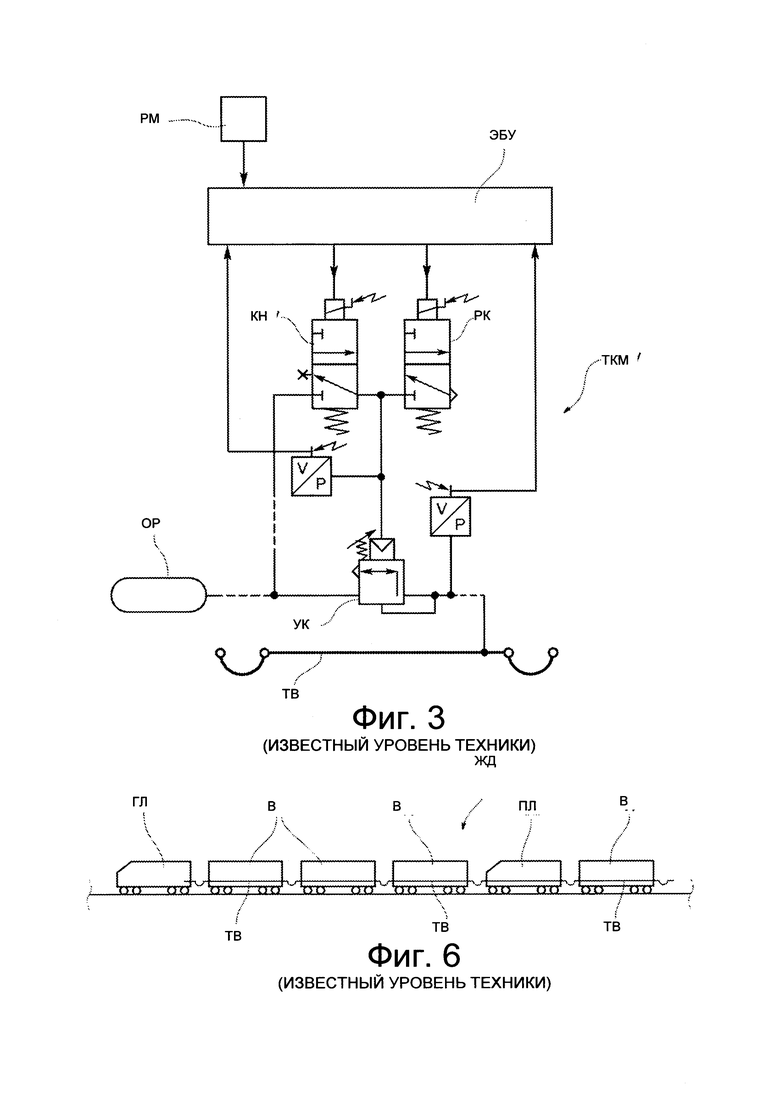
Локомотив поезда оборудован тормозным клапаном машиниста (ТКМ), представляющим собой электропневматическое устройство, схема которого приведена на Фиг. 3. Это устройство обычно имеет в своем составе ускорительный клапан УК, опорное давление которого в контрольной камере, далее по тексту именуемое «уставкой», регулируется с помощью электромагнитного клапана наполнения КН и электромагнитного клапана сброса КС, управляемых электронным блоком ЭБУ, находящемся во взаимодействии с тормозной рукояткой машиниста РМ.
Если требуется частичное или полное удаление воздуха из тормозной системы поезда, ЭБУ обеспечивает давление уставки более 3,5 бар, в соответствии с запросом машиниста, или равное 5 бар, если запрашивается полное удаление воздуха. Затем ускорительный клапан УК начинает подачу воздуха в тормозной воздухопровод ТВ, производя его забор из основного резервуара ОР посредством компрессора (не показан) при давлениях более 5 бар, обычно в пределах от 8 бар до 10 бар, с прерыванием подачи воздуха в воздухопровод ТВ, например, тогда, когда давление в нем станет номинально равно значению уставки за вычетом допусков ускорительного клапана.
Как описано выше, на этом этапе заполнение тормозного воздухопровода ТВ воздухом, подаваемым в него из основного резервуара ОР через ускорительный клапан УК, дополнительно приводит к заполнению вспомогательного резервуара BP каждого вагона поезда.
Если требуется частичная или полная активация тормозной системы поезда, блок управления ЭБУ обеспечивает давление уставки менее 5 бар, в соответствии с тормозным запросом машиниста, с последующим снижением до 3,5 бар, если запрашивается полное торможение. После этого действия ускорительный клапан УК начинает «освобождать» тормозной воздухопровод ТВ путем выпуска воздуха в атмосферу и прерывает этот процесс только тогда, когда давление в воздухопроводе достигает номинального равенства значению уставки за вычетом допусков ускорительного клапана.
При получении запроса на экстренное торможение, уставка давления в воздухопроводе ТВ доводится до 0 бар, а ускорительный клапан УК производит полное удаление воздуха из воздухопровода ТВ. При этом установленный между ускорительным клапаном УК и воздухопроводом ТВ быстродействующий аварийный клапан (не показан на Фиг. 3) немедленно открывается, чтобы безопасно уменьшить давление в воздухопроводе ТВ до нуля, ускорив процесс удаления воздуха.
Несомненно длина поезда существенно влияет на время заполнения воздухопровода ТВ и удаления воздуха из него, поскольку увеличение длины поезда сопровождается увеличением количества воздуха, которое должно вводиться или удаляться через ускорительный клапан УК и аварийный клапан, а также увеличением задерживающего эффекта, связанного с трением воздуха о стенки воздухопровода ТВ.
В частности, из-за этого трения во время динамической фазы процесса активации или дезактивации тормозной системы давление в воздухопроводе ТВ неоднородно по длине поезда в течение относительно длительного периода времени.
График на Фиг. 4 показывает изменение во времени давлений в тормозном воздухопроводе ТВ в поезде длиной 1200 м, состоящем из 50 вагонов, в результате экстренного торможения, причем давление измеряется для каждого вагона: нижняя кривая на Фиг. 4 соответствует изменению давления для ближайшего к локомотиву вагона, тогда как верхняя кривая соответствует изменению давления для последнего вагона. Мы видим, что давление в первом вагоне достигает значения 3,5 бар, что соответствует максимальному значению торможения, примерно через 3 с, а давление в последнем вагоне достигает этого значения примерно через 37 секунд.
Таким образом, как показано на графиках на Фиг. 5, тормозное давление в тормозных цилиндрах последнего вагона поезда, показанное в данном случае кривой, расположенной справа, достигает максимального значения с задержкой на более чем 30 с относительно первого вагона, которому соответствует кривая, расположенная слева.
Аналогичным образом, при отключении тормозной системы, давление в воздухопроводе ТВ в начале поезда сразу же достигает значения уставки, в то время как давление в задней части поезда медленно увеличивается по мере прохождения всего количества воздуха, необходимого для восстановления баланса давления между передней и задней частями и заполнения всех вспомогательных резервуаров (BP), от основного резервуара ОР до воздухопровода ТВ через ускорительный клапан УК. Увеличение производительности ускорительного клапана УК не решает этих проблем, так как пределы производительности системы клапан-тормозной воздухопровод для этих длин определяются, по существу, исключительно гидродинамическим трением воздуха в воздухопроводе ТВ.
Явления переходной неравномерности давления вдоль воздухопровода ТВ, описанное выше, оказывают прямое влияние на динамическое поведение движущегося поезда, создавая вдоль него продольные сжимающие силы, что является условием, благоприятным для схода с рельсов. Стандарты МСЖД допускают наличие этих явлений и, исходя из европейских параметров по максимальному предельному весу на ось, и сил, которые могут быть достигнуты тормозными системами для достижения дистанций торможения, предусмотренных европейскими нормами, определяют 750 м как максимальную безопасную длину поездов.
Длина 750 м для товарных поездов в настоящее время является ограничением, снижающим эффективность грузоперевозок: Европейским железнодорожным операторам требуется иметь возможность работать с более длинными поездами - до 1500 м, то есть в два раза больше существующего безопасного предельного значения, установленного стандартами МСЖД.
Для этого необходимо уменьшить неравномерность и задержки выравнивания давления вдоль воздухопровода ТВ во время переходной стадии торможения посредством снижения до безопасных уровней продольных сжимающих напряжений и связанных с ними рисков схода с рельсов. Следует также иметь в виду, что поезда такой длины, состоящие из особенно тяжелых вагонов, могут потребовать приложение тяговых сил, намного превышающих силы, которые могут быть развиты современным европейским локомотивом.
Известно, что в сфере МСЖД существует решение для увеличения тяговой способности: оно состоит в соединении ведущего локомотива с, по меньшей мере, еще одним локомотивом, управление которого осуществляется ведущим локомотивом через соединительный кабель. Однако это решение имеет ограничения, связанные с тем, что максимальная тяговая сила, которую могут развить два локомотива по отношению к поезду, соответствует предельному напряжению сцепки между вторым локомотивом и остальной частью поезда, а также с тем фактом, что проблема выравнивания давления в воздухопроводе ТВ во время переходных процессов торможения остается нерешенной.
В Америке железнодорожная отрасль регулируется положениями ААЖД (Ассоциации американских железных дорог), в соответствии с которыми известно решение, более эффективно решающее данную проблему; оно заключается в использовании метода «распределенной мощности», схематически проиллюстрированного на Фиг. 6, в соответствии с которым в железнодорожном поезде ЖДП используются два или большее количество локомотивов, а именно главный локомотив ГЛ, расположенный в голове поезда ЖДП, и один или несколько подчиненных локомотивов ПЛ, расположенных между вагонами В поезда. Этот поезд работает под управлением системы, известной под названием Locotrol (зарегистрированный товарный знак), основные характеристики которой будут кратко описаны для достижения большего понимания настоящего изобретения.
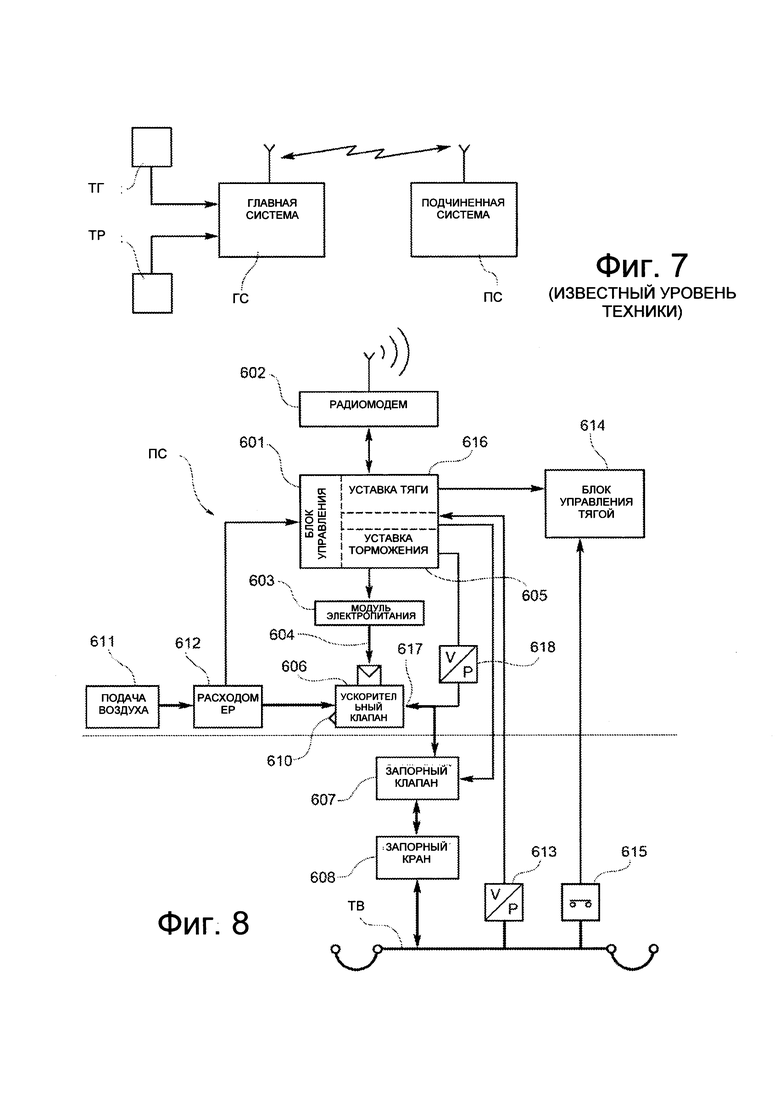
Как схематично показано на Фиг. 7, эта система управления содержит главную систему ГС, расположенную на главном локомотиве ГЛ, и одну или несколько подчиненных систем ПС, каждая из которых расположена на подчиненном локомотиве ПЛ. Главная система ГС связывается с подчиненной системой (системами) ПС по выделенному радиоканалу, работающему на частотах около 450 МГц, при поддержке определенного заранее протокола передачи данных. В режиме реального времени главная система ГС регистрирует команды машиниста по активации тяги ТГ и торможения TP, отправляемых им посредством управляющих устройств, и передает соответствующие данные в подчиненную систему(-ы) ПС, функцией которой(-ых) является локальное «повторение» команд машиниста для тяговых и тормозных систем подчиненных локомотивов ПЛ.
В фазе тяги наличие множества локомотивов, распределенных по длине поезда и получающих синхронизированные команды по активации тяги, позволяет лучше использовать имеющуюся тяговую силу, поскольку пиковое растягивающее напряжение не сконцентрировано на сцеплении после ведущего(-их) локомотива(-ов), что характерно для европейских решений с двумя ведущими локомотивами, а распределяется по всем сцеплениям между локомотивами, распределенными вдоль поезда, и следующими за ними вагонами. Результат эквивалентен разделению поезда на два или большее количество поездов, по-отдельности буксируемых распределенными локомотивами.
Во время активации тормозной системы, наличие множества локомотивов, распределенных вдоль поезда, с синхронизированным получением команд активации торможения, означает наличие распределенных вдоль поезда точек удаления воздуха из тормозного воздухопровода ТВ. Результат эквивалентен разделению поезда на поезда с границами, определяемыми положением подчиненного(-ых) локомотива(-ов), при котором воздух из каждого сегмента тормозного воздухопровода ТВ каждого поезда откачивается независимо через его концы. Это позволяет существенно уменьшить неравномерность распределения давления в воздухопроводе ТВ и пиковые продольные напряжения вдоль поезда, возникающие во время переходного процесса торможения. Кроме того, на торможение тратится гораздо меньше времени, что означает сокращение времени откачки воздуха из воздухопровода ТВ.
Аналогично, во время дезактивации тормозной системы, наличие множества локомотивов, распределенных вдоль поезда, с синхронизированным получением команд дезактивации торможения, означает наличие распределенных вдоль поезда точек подачи воздуха в тормозной воздухопровод ТВ. В этом случае результат эквивалентен разделению поезда на поезда с границами, определяемыми положением подчиненных локомотивов, при котором воздух в каждый сегмент воздухопровода ТВ каждого поезда закачивается независимо через его концы, сопровождаясь существенным сокращением времени дезактивации тормозной системы.
При потере радиосвязи между главной системой ГС и подчиненными системами ПС система реагирует в соответствии с процедурой, известной как «Comm Loss Idle Down», описание которой можно легко найти в доступной в Интернете литературе по железнодорожному оборудованию. В соответствии с этой процедурой подчиненные системы ПС начинают постепенно уменьшать тяговые усилия, присутствующие на подчиненных локомотивах ПЛ, до нулевого значения и одновременно блокируют управление воздухопроводом ТВ на подчиненных локомотивах ПЛ, оставляя задачу откачки воздуха из тормозного воздухопровода ТВ, если запрос на торможение поступает от машиниста, только на главном локомотиве ГЛ. Однако этот режим работы с ухудшенными характеристиками не считается опасной ситуацией в области ответственности ААЖД, поскольку требования ААЖД к тормозным системам и дистанциям торможения намного ниже, чем эквивалентные требования МСЖД, и, следовательно, приостановка откачки воздуха и неравномерность давления в тормозном воздухопроводе ТВ во время переходных процессов торможения считаются допустимыми.
Кроме того, обжимная муфта между вагонами, соответствующая требованиям ААЖД, обеспечивает большую стабильность поезда и большее сопротивление продольным напряжениям по сравнению с обжимными муфтами, использующими буферы в соответствии с требованиями МСЖД, особенно в случаях, когда поезд должен преодолевать изгиб. В общих чертах, торможение поезда, конструкция которого соответствует требованиям ААЖД, а длина в два или три раза превышает длину поезда по МСЖД, выполняемое путем откачки воздуха из воздухопровода ТВ только через клапан в главном локомотиве ГЛ, не приводит к рискам схода с рельсов.
Машинисты в зоне ответственности ААЖД по существу делятся на машинистов пассажирских поездов и машинистов грузовых поездов. Соответственно, существует четкое разделение между железнодорожными сетями для пассажирских и грузовых перевозок, и отсутствует необходимость обеспечения единых эксплуатационных требований для этих двух видов.
В области ответственности ААЖД мощность радиосигнала между главной системой ГС и подчиненными системами ПС достигает значений, близких к 30 Вт.
И наоборот, в европейской среде (область ответственности МСЖД) пассажирский транспорт должен делить железнодорожную сеть с грузовой сетью, и для обоих типов поездов должны соблюдаться единые правила и одинаковые дистанции торможения.
Максимальная мощность радиопередачи, разрешенная стандартами ETSI (Европейский институт стандартизации в области телекоммуникации) на частотах около 450 МГц, в настоящее время составляет 500 мВт, и маловероятно, что в будущем будет получено разрешение на увеличение мощности передачи до значений выше 1 Вт для железнодорожного оборудования, хотя даже этот уровень намного ниже мощности, разрешенной правилами ААЖД.
Кроме того, европейские железнодорожные сети имеют больше туннелей, чем сети американских грузовых перевозок. Из теории распространения известно, что в туннелях происходит сильное затухание частот около 450 МГц, и в ситуации, когда передающая система и принимающая система находятся за пределами противоположных концов туннеля, связь может быть полностью заблокирована. Поэтому вероятность потери радиосвязи при применении методов МСЖД значительно выше, чем в случае ААЖД.
Вышеприведенное описание дает понять, что в соответствии со спецификациями ААЖД распределенная энергосистема при ее использовании в соответствии с европейскими стандартами и условиями, обеспечивает значительно более низкий уровень доступности и влечет за собой более высокий риск возникновения препятствий для осуществления пассажирских перевозок. Кроме того, способ Comm Loss Idle Down, применяемый в области действия ААЖД, не может быть применен к поезду МСЖД длиной более 750 м.
В патенте US 8190311 В2 описывается решение, частично предвосхищенное в ЕР 0983920, которое может быть реализовано, например, с помощью системы Locotrol (зарегистрированная торговая марка), таким образом, что в отличие от положений способа Comm Loss Idle Down, при отсутствии радиосвязи и снижении генерируемого главной системой ГС давления в тормозном воздухопроводе ТВ, обнаруженном подчиненными системами ПС на борту подчиненных локомотивов ПЛ, где это снижение давления больше заданного значения, например, 0,5 бар (около 7 фунтов на квадратный дюйм), подчиненные системы ПС на борту подчиненных локомотивов ПЛ, в свою очередь, осуществляют постоянное понижение давления на 0,7 бар (около 12 фунтов на квадратный дюйм) или больше, что способствует дальнейшей откачке воздуха из тормозного воздухопровода ТВ в точках расположения локомотива ПЛ, что сокращает время торможения и, что наиболее важно, ограничивает продольные напряжения. Снижение давления, выполняемое подчиненными локомотивами ПЛ, прекращается только после восстановления радиосвязи.
Однако это решение лишь частично решает проблемы применимости методов распределенной мощности, используемых в области действия ААЖД. Это связано с тем, что хотя проведение процедуры согласно US 8190311 В2 частично уменьшает продольные напряжения и риски схода с рельсов, но оно не предоставляет необходимую возможность продолжения маневрирования поездом даже в режиме работы с ухудшенными характеристиками в случае, если радиосвязь не восстанавливается.
Таким образом, одна из задачей настоящего изобретения заключается в том, чтобы предложить усовершенствованную систему для управления грузовым поездом типа распределенной мощности и, в частности, систему для управления подчиненным локомотивом(-ами), которая в случае потери радиосвязи позволяет машинисту управлять поездом в режиме тяги и торможения без ограничений по времени, а, при необходимости, в ограниченных рабочих условиях и при пониженной скорости.
В соответствии с настоящим изобретением эта и другие задачи достигаются с помощью системы типа, определенного в начале этого документа, основные характеристики которой приведены в прилагаемом пункте 1 формулы изобретения. Зависимые пункты формулы изобретения определяют подходящие варианты осуществления системы управления в соответствии с настоящим изобретением.
Дополнительные характеристики и преимущества изобретения будут очевидны из следующего подробного описания, которое дается исключительно в виде неограничивающего примера со ссылкой на прилагаемые чертежи, на которых:
Фиг. 1 (описанный выше) представляет собой график, иллюстрирующий связь между давлением, приложенным к тормозным цилиндрам, и давлением в тормозном воздухопроводе при приложении и отключении тормозного усилия в вагоне поезда;
На Фиг. 2 (описанный выше) приводится пневматическая схема тормозной системы стандартного вагона поезда;
На Фиг. 3 показана принципиальная электропневматическая схема тормозного крана машиниста;
Фиг. 4 (описанный выше) представляет собой набор графиков, иллюстрирующих распределение давления в тормозном воздухопроводе в различных вагонах поезда длиной 1200 м;
Фиг. 5 (описанный выше) представляет собой набор графиков, иллюстрирующих задержку активации давления торможения по отношению к тормозным цилиндрам в различных вагонах поезда;
Фиг. 6 (описанный выше) представляет собой схематическое изображение железнодорожного поезда, состоящего из главного локомотива и, по меньшей мере, одного подчиненного локомотива;
Фиг. 7 (описанный выше) представляет собой схематическое изображение главной и подчиненной систем, используемых в поездах, состоящих из главного локомотива и, по меньшей мере, одного подчиненного локомотива;
На Фиг. 8 представлена блок-схема подчиненной системы ПС для реализации настоящего изобретения; и
На Фиг. 9 и 10 приведены блок-схемы, иллюстрирующие процессы торможения и тяги, соответственно, выполняемые подчиненной системой в системе управления в соответствии с настоящим изобретением.
Настоящее изобретение предлагает систему управления для поезда, состоящего из главного локомотива и, по меньшей мере, одного подчиненного локомотива в промежуточном положении в поезде, то есть поезда, схематично показанного на Фиг. 6. Система, в частности, осуществляет процедуру управления подчиненным локомотивом(-ами) в случае потери радиосвязи с главным локомотивом.
Для этой цели, в части контроля давления в тормозном воздухопроводе ТВ, в отличие от системы Locotrol (зарегистрированная торговая марка) и положений способа Idle Down Comm Loss Down, применяются следующие принципы:
- когда главный локомотив ГЛ активирует торможение, тем самым уменьшая давление в воздухопроводе ТВ, подчиненные системы ПС на борту подчиненных локомотивов ПЛ, наблюдая изменение давления в воздухопроводе ТВ, должны идентифицировать данное событие и способствовать уменьшению давления, максимально точно следуя команде торможения, полученной от главного локомотива ГЛ, что во всех случаях способствует сокращению дистанций торможения и делает процесс торможения максимально равномерным по длине поезда, что позволяет избежать возникновения чрезмерных продольных напряжений; это достигается, как описано более подробно ниже, путем локальной активации множества отрицательных перепадов давления в соответствии с алгоритмом, описанным ниже; практические испытания показали, что достаточно двух или трех этапов снижения давления в диапазоне от 5 до 3,5 бар для достижения требуемого давления в воздухопроводе ТВ;
- если главный локомотив ГЛ после снижения давления в воздухопроводе ТВ до заданного значения регистрирует, что давление в воздухопроводе ТВ стабильно имеет это указанное значение, подчиненные системы ПС на борту подчиненных локомотивов ПЛ должны распознать произошедшую стабилизацию давления и, следовательно, должны блокировать доступ своего устройства ТКМ для управления воздухопроводом ТВ от самого воздухопровода, что позволяет полностью стабилизировать воздухопровод при заданном значении давления, при условии, что воздухопровод ТВ контролируется исключительно главным локомотивом ГЛ; эта процедура обеспечивает полное и когерентное выравнивание всех распределительных клапанов РК по всему поезду;
- если главный локомотив ГЛ инициирует обратный процесс увеличения давления в воздухопроводе ТВ для уменьшения торможения поезда, подчиненные системы ПС на борту подчиненных локомотивов ПЛ должны распознать это событие и, если их собственные устройства для управления давлением в воздухопроводе ТВ еще не были заблокированы, должны немедленно выполнить блокировку или обеспечить изоляцию от воздухопровода ТВ, что позволяет осуществлять заполнение данного воздухопровода исключительно от главного локомотива ГЛ; эта процедура позволяет главному локомотиву ГЛ продолжать поддерживать полное и когерентное выравнивание всех распределительных клапанов РК по всему поезду.
В то же время, все еще в условиях отсутствия радиосвязи, для контроля тяги, в отличие от системы Locotrol (зарегистрированная торговая марка) и положений способа Comm Loss Idle Down, соблюдаются следующие принципы:
- если прерывание радиосвязи обнаружено при полностью отключенной тормозной системе поезда, то есть при номинальном давлении в воздухопроводе ТВ - 5 бар (в системе МСЖД), подчиненные системы ПС на борту подчиненных локомотивов ПЛ должны инициировать процедуру постепенного уменьшения тяги до достижения заданного значения тягового усилия γ с заданным градиентом γ1, причем значение γ может быть равно нулю; стабилизация тягового усилия в значении γ, отличном от нуля, позволяет главному локомотиву ГЛ продолжать движение поезда при поддержке подчиненных локомотивов ПЛ. В качестве примера, тяговое усилие подчиненных локомотивов γ может быть отрегулировано таким образом, чтобы главный локомотив ГЛ мог тянуть поезд в условиях ограниченной скорости при указанном максимальном градиенте маршрута: фактически, если усилие подчиненных локомотивов γ равно нулю, то в случае максимального уклона будет возникать риск получения тягового усилия от главного локомотива ГЛ, недостаточного даже для передвижения поезда, что приведет к остановке поезда на путях; упомянутые значения γ и γ1 могут быть предварительно определены оператором до начала миссии в соответствии с требованиями соответствующего маршрута; в соответствии с другим вариантом осуществления изобретения, карта значений γ и γ1 может быть загружена в память каждой подчиненной системы ПС, а также может быть использована систем определения местоположения, такая как система GPS, подключенная к каждой подчиненной системе ПС, которая позволит изменять значения γ и γ1 в соответствии с географическим положением поезда;
- если главный локомотив ГЛ активирует тормозную систему, уменьшая давление в воздухопроводе ТВ, то подчиненные системы ПС, обнаружив снижение давления в воздухопроводе ТВ, должны немедленно уменьшить тяговое усилие до нуля; это действие выполняется автоматически независимыми от подчиненных систем ПС устройствами, известными специалистам в данной области техники как устройства «отцепления»;
- если давление в воздухопроводе ТВ доведено до 5 бар ном. (МСЖД) в результате процедуры дезактивации тормозной системы, описанной выше, подчиненные системы ПС на борту локомотивов ПЛ начинают процедуру постепенного увеличения тяги до тех пор, пока не будет достигнуто упомянутое заданное значение γ, с уклоном γ2, который не обязательно равен γ1; уклон γ2 также может быть предварительно определен оператором до начала миссии или может быть загружен в память подчиненных систем ПС и выбран на основе географического положения поезда с помощью системы определения местоположения.
На Фиг. 8 приведена блок-схема, иллюстрирующая архитектуру подчиненной системы ПС.
На этой фигуре тонкими линиями обозначены электрические соединения, а толстыми - пневматические соединения.
Электронный блок управления 601 соединен с радиомодемом 602, используемым для связи с другими главными системами ГС или подчиненными системами ПС того же поезда.
Также блок управления 601 соединен с электропневматическим модулем 603, который отвечает за создание пневматического управляющего давления 604, соответствующего уставке 605, причем уставка 605 генерируется блоком управления 601. Пневматическое рабочее давление 604 подается в камеру управления высокопроизводительного пневматического ускорительного клапана 606, входное отверстие 617 которого соединено с воздухопроводом ТВ посредством запорного клапана 607 и крана блокировки 608. Ускорительный клапан 606 устанавливает давление в воздухопроводе ТВ на том же значении, что и в его камере управления. Если давление в воздухопроводе ТВ ниже давления, присутствующего в камере управления, то ускорительный клапан 606 увеличивает давление в воздухопроводе ТВ, вытягивая сжатый воздух из устройств подачи 611, которые обычно находятся под давлением выше, чем максимально допустимое рабочее давление в воздухопроводе ТВ, причем упомянутые значения обычно находятся в диапазоне от 8 до 10 бар.
Во время подачи давления в воздухопровод ТВ подаваемый поток воздуха измеряется датчиком расхода 612, расположенным между устройствами подачи 611 и ускорительным клапаном 606, и значение этого потока непрерывно отправляется в блок управления 601. Когда давление в воздухопроводе ТВ достигает давления, установленного в камере управления ускорительного клапана 606, этот клапан 606 прерывает подачу давления в воздухопровод ТВ.
Если давление в воздухопроводе ТВ становится выше, чем значение давления, присутствующее в камере управления, ускорительный клапан 606 уменьшает давление в воздухопроводе ТВ, отводя из него сжатый воздух и сбрасывая его в атмосферу через выпускное отверстие 610. Во время откачки воздуха из воздухопровода ТВ расходомер 612 будет по-прежнему измерять нулевой поток. Когда давление в воздухопроводе ТВ достигает давления, установленного в камере управления ускорительного клапана 606, упомянутый клапан 606 прерывает откачку воздуха из упомянутого воздухопровода.
Запорный клапан 607, управляемый блоком управления 601, предназначен для предотвращения срабатывания ускорительного клапана 606 или откачки давления из воздухопровода ТВ.
Датчик давления 613 измеряет давление в воздухопроводе ТВ, и это измерение в режиме реального времени отправляется на блок управления 601. Поскольку датчик давления 613 расположен на определенном расстоянии от ускорительного клапана 606, и во всех случаях ниже по потоку от запорного клапана 607 и крана блокировки 608, то в случае наличия воздушного потока из воздухопровода ТВ в атмосферу через выпускное отверстие 610 ускорительного клапана 606, датчик создаст перепад давления между положением, в котором датчик давления 613 производит измерение, и отверстием 617 ускорительного клапана 606. Поэтому блок управления 601 может вычислить наличие или отсутствие потока воздуха из воздухопровода ТВ в выпускное отверстие 610 путем оценки разницы между давлением, измеренным датчиком давления 613, и значением давления 604, установленным электропневматическим модулем 603 для камеры управления ускорительного клапана 606.
Альтернативным решением является установка дополнительного датчика давления 618, подключение пневматического отверстия которого находится вблизи отверстия 617 ускорительного клапана 606 и электрический сигнал которого отправляется в блок управления 601. Таким образом, блок управления 601 может проверять наличие воздушного потока путем измерения дифференциального давления с использованием значений, определяемых датчиками давления 613 и 618.
Блок управления тягой 614, предназначенный для обеспечения управления скоростью и крутящим моментом тяговой системы, получает уставку тягового усилия 616 от блока 601 управления.
Устройство 615, представляющее собой, как правило, датчик для определения давления в воздухопроводе ТВ, соединено с блоком управления тягой 614 и сконструировано таким образом, чтобы можно было отключить тяговый момент, если давление в воздухопроводе ТВ начинает уменьшаться относительно номинального значения 5 бар.
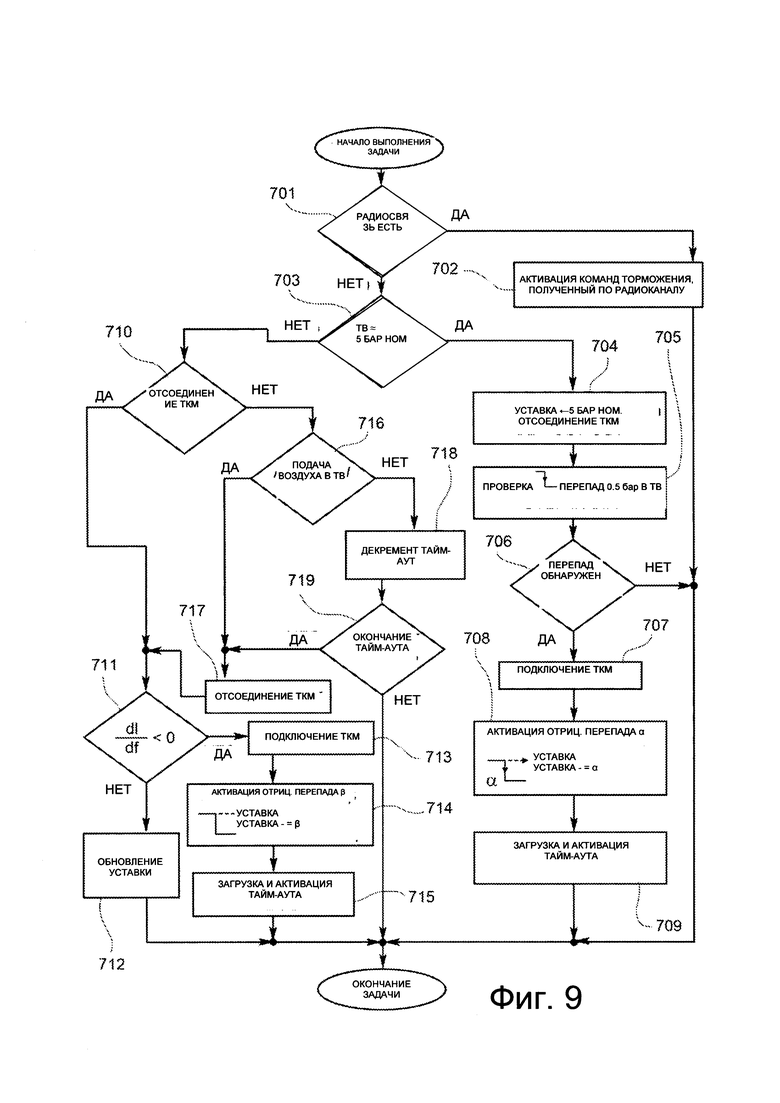
Блок-схема на Фиг. 9 описывает процесс торможения в подчиненной системе ПС. Эта схема описывает, в частности, задачу, являющуюся периодически выполняемой, например, каждые 100 мс.
Специалисту в данной области техники известно, что упомянутая блок-схема также может выполняться в бесконечном цикле при условии, что она может обеспечить стабильную периодичность выполнения, например, каждые 100 мс.
Схема на Фиг. 9 использует определение «5 бар ном.» применительно к значению давления, хранящемуся в блоке управления 601. Это значение представляет локальное значение давления в воздухопроводе ТВ во время торможения поезда, сохраненное во время этапа его инициализации.
Специалист в области железнодорожных тормозных систем знает, что необходимо использовать именно это значение, а не абсолютное значение 5 бар, поскольку в очень длинном поезде давление в воздухопроводе ТВ в точках, удаленных от главного локомотива ГЛ, может иметь несколько более низкие значения из-за потерь вдоль воздухопровода ТВ, и в этом случае использование абсолютного значения 5 бар может привести к неправильной работе алгоритма.
На основании блок-схемы на Фиг. 9,
• если на этапе 701 подтверждается наличие радиосвязи, происходит переход к этапу 702, на котором подчиненная система ПС выполняет любые команды по активации или отключению тормозной системы, полученные от главной системы ГС, после чего происходит выход из задачи;
• если на этапе 702 обнаруживается отсутствие радиосвязи, то происходит переход к этапу 703, на котором блок управления 601 проверяет по сигналам от датчика давления 613, является ли давление в воздухопроводе ТВ приблизительно равным номиналу 5 бар ном., то есть, находится ли тормозная система в процессе отключения, чтобы поезд мог продолжать движение, или оно меньше 5 бар ном., то есть тормозная система частично или полностью применяются; если давление в воздухопроводе ТВ приблизительно равно 5 бар ном., происходит переход к этапу 704; в противном случае - переход к этапу 710; выражение «приблизительно равно» означает, что во время проведения теста на этапе 703 была использована область допустимых значений, которая предусматривает возможность наличия помех при измерениях и микроколебаний давления;
• на этапе 704 подтверждается значение уставки, используемое блоком управления при давлении 5 бар ном.: блок управления 601 активирует запорный клапан 607 (Фиг. 8), который изолирует ускорительный клапан 606 от воздухопровода ТВ и предотвращает влияние этого клапана 606 на давление в воздухопроводе; таким образом, блок управления подчиненной системы ПС полностью передает управление давлением в воздухопроводе ТВ главной системе ГС;
• затем происходит переход к этапу 705, на котором блок управления 601 проверяет, считывая сигнал от датчика давления 613, проходит ли отрицательный перепад давления 0,5 бар ном. по воздухопроводу ТВ, то есть, инициировала ли главная система ГС активацию цикла торможения;
• на этапе 706 принимается решение на основании результата проверки, проведенной на этапе 705: если не было обнаружено отрицательное давление, это означает, что воздухопровод ТВ стабильно находится в состоянии отключения тормозной системы, других этапов не предусмотрено, и задача завершается; однако, если обнаружен отрицательный перепад давления, говорящий о начале активации торможения главной системой ГС, происходит переход к этапу 707, на котором блок управления 601 отключает запорный клапан 607, позволяя подчиненной системе ПС изменять давление в воздухопроводе ТВ посредством соответствующего управления ускорительным клапаном 606; затем происходит переход к этапу 708, на котором уставка давления уменьшается на величину α>0,5 бар, например 1 бар; в результате этого действия электропневматический блок или модуль 603 (Фиг. 8) устанавливает номинальное значение давления (5 бар - α) в камере управления ускорительного клапана 606 или, например, 4 бар; таким образом, ускорительный клапан 606 начинает локальную откачку воздуха из воздухопровода ТВ, ускоряя снижение давления в нем до 4 бар, помогая главной системе ГС осуществить торможение более равномерно вдоль поезда;
• на этапе 709 задается предопределенное значение тайм-аут и запускается; этот тайм-аут будет уменьшаться в течение этапов, описанных ниже; как подробно объясняется ниже, его целью является информирование подчиненной системы ПС о том, когда прерывать откачку воздуха из воздухопровода; после начала тайм-аута задача считается завершенной;
• если на этапе 703 обнаружено давление в воздухопроводе ТВ ниже 5 бар ном., то есть тормозная система частично или полностью активирована, то происходит переход к этапу 710, на котором выполняется проверка, находится подчиненная система ПС в активном или отключенном состоянии, то есть контролирует эта система воздухопровод ТВ или изолирована от него;
• если на этапе 710 обнаруживается, что подчиненная система ПС находится в отключенном состоянии, то есть ускорительный клапан 606 не влияет на давление в воздухопроводе ТВ, то происходит переход к этапу 711, на котором выполняется проверка того, на наблюдаются ли в воздухопроводе ТВ отрицательные колебания давления, характерные для возможного продолжения поступления запроса на торможение от главной системы ГС;
• если на этапе 711 обнаруживается, что в воздухопроводе ТВ происходят нулевые или положительные колебания давления, то происходит переход к этапу 712, на котором блок управления 601 добавляет свою уставку к текущему значению давления в воздухопроводе ТВ, чтобы произвести точное измерение момента возврата к этапу 711 при следующем выполнении задачи; последовательность 711-712 важна для настоящего изобретения, поскольку, как можно увидеть, на этой фазе подчиненная система ПС позволяет главной системе ГС производить заполнение воздухопровода ТВ, таким образом останавливая торможение, даже в отсутствие радиосигнала, хотя и намного медленнее, чем в случае помощи со стороны подчиненной системы ПС при наличии радиосвязи; в этом режиме поезд может продолжать движение, но с увеличенным временем реакции и, возможно, с уменьшенной скоростью; в другом случае подчиненная система ПС, работающая в соответствии с настоящим изобретением, продолжает работать в безопасном режиме, то есть никогда не отключает торможение независимо от того, есть радиосвязь или нет, но все же допускает медленную откачку воздуха из тормозной системы посредством главной системы ГС, если от машиниста приходит такая команда;
• если на этапе 711 обнаруживается, что давление в воздухопроводе ТВ имеет отрицательные колебания, что указывает на то, что в главной системе ГС продолжается запрос на снижение давления в воздухопроводе ТВ, то происходит переход к этапу 713, на котором блок управления 601, действуя посредством запорного клапана 607, повторно соединяет ускорительный клапан 606 с воздухопроводом ТВ; сразу после этого на этапе 714 отрицательный перепад давления β, не обязательно равный α, вычитается из текущего значения уставки: это новое значение становится опорным давлением в камере управления ускорительного клапана 606, который продолжает заполнение воздухопровода ТВ до достижения указанного нового значения уставки; на этапе 715 устанавливается и активируется такой же тайм-аут, что описан для этапа 709, с заранее заданным значением;
• если на этапе 710 обнаруживается, что ускорительный клапан 606 соединен с воздухопроводом ТВ, то есть, если упомянутый ускорительный клапан может влиять на величину давления в воздухопроводе, происходит переход к этапу 716, на котором блок управления 601, получая сигналы от расходомера 612, проверяет, может ли ускорительный клапан 606 переносить воздух из устройств подачи 611 в воздухопровод ТВ; если это так, то это значит, что давление в воздухопроводе ТВ ниже текущей уставки, то есть, что главная система ГС управляет давлением ниже текущей уставки подчиненной системы ПС, и происходит переход к этапу 717, на котором блок управления 601 немедленно блокирует ускоряющий клапан от воздухопровода ТВ, предотвращая повторный доступ воздуха; это важный аспект настоящего изобретения, поскольку он показывает, как в отсутствие радиосвязи подчиненная система ПС автоматически предотвращает доступ воздуха в воздухопровод ТВ, то есть она предотвращает откачку воздуха, выполняемую главной системой ГС, то есть упомянутую откачку воздуха, указывающую на решение увеличить уровень торможения до значения, большего, чем значение, соответствующее текущему значению уставки, принятому в главной системе ГС; затем происходит переход к этапу 711, описанному выше: на практике, в результате этапа 717 будет снижаться давление в воздухопроводе, что приведет к срабатыванию ускоряющего клапана при более низком значении, равном β бар, и тем самым к повторному запуску откачки воздуха из воздухопровода ТВ, действующему в том же направлении, в котором действует главная система ГС;
• если на этапе 716 блок управления 601 определяет по сигналу расходомера 612, что от устройств подачи 611 нет потока воздуха в воздухопровод ТВ 609, это значит, что ускорительный клапан 606 достиг значения давления, заданного командой главной системы ГС, или все еще откачивает воздух из воздухопровода ТВ. Второй вариант может быть вызван двумя разными ситуациями, а именно: первой ситуацией, которую мы назовем С1, при которой из воздухопровода ТВ все еще идет откачка воздуха как главной системой ГС, так и подчиненной системой ПС; или второй ситуацией, которую мы назовем С2, при которой к уставке давления применяется отрицательный декремент (независимо от того, является ли это α или следующий декремент β или далее идущие декременты n*β в соответствии с дальнейшими итерациями по блок-схеме), в результате которой уставка подчиненной системы ПС приведена к значению ниже установленного в главной системе ГС; во второй ситуации (С2) две уставки находятся в конфликте, поскольку ускоряющий клапан главной системы ГС продолжает заполнять воздухопровод ТВ, пытаясь противостоять ускоряющему клапану подчиненной системы ПС, которая, в свою очередь, пытается противодействовать ускоряющему клапану главной системы ГС путем откачки воздуха из воздухопровода ТВ со своей стороны; в этой ситуации используется тайм-аут, описанный на этапах 709 и 715: тайм-аут уменьшается на этапе 718, а на этапе 719 выполняется проверка того, был ли этот тайм-аут сброшен до нуля, и если это не так, то задача считается завершенной; если тайм-аут достиг нулевого значения, осуществляется переход к этапу 717, описанному выше; в случае, если на этапе 711 обнаруживается положительный (или нулевой) градиент давления в воздухопроводе ТВ, это означает, что система находится в ситуации С2 и, следовательно, главная система ГС может начать заполнение воздухопровода ТВ до тех пор, пока значение не станет равномерным по всей его длине; наоборот, если на этапе 711 обнаруживается отрицательное значение, это означает, что система находится в ситуации С1, и затем, переходя к этапу 713, подчиненная система ПС возобновит откачку воздуха из воздухопровода ТВ, помогая главной системе.
Кроме того, в отличие от положений US 8190311 В2, настоящее изобретение допускает потерю радиосвязи во время фазы торможения. Фактически, самой сложной ситуацией является та, что возникает, когда торможение уже было активировано и выполнено системой посредством радиокоманды, то есть во время этапов 701, 702, а в воздухопроводе ТВ уже достигнуто стабильное значение давления: если связь потеряна на этом этапе, система больше не может делать выводы, исходя из информации, представленной отрицательным перепадом 0,5 бар; на диаграмме это состояние представлено последовательностью этапов 701, 703, 710, 711, где на этапе 711 подчиненная система ПС проверяет наличие дополнительных отрицательных изменений, которые указывают на продолжение откачки воздуха из воздухопровода ТВ главной системой ГЛ; из-за длины воздухопровода ТВ между главным и подчиненными локомотивами, в случае, если блок управления 601 работает в режиме поддержки ускорительного клапана 606 в состоянии соединения с воздухопроводом ТВ путем постоянной активации запорного клапана 607, то ускорительный клапан 606 будет активно устанавливать значение давления, соответствующее значению уставки 605 (Фиг. 8): в этом состоянии локальное значение давления в воздухопроводе ТВ будет минимально подвержено колебаниям, даже большим, заданным главной системой ГС: иначе для блока управления 601 подчиненной системы ПС было бы невозможно обнаружить колебания давления в воздухопроводе ТВ посредством непрерывного измерения, выполняемого с помощью датчика 613, имеющие симптоматику изменения давления, заданного главной системой ГС, по меньшей мере, в течение времени, достаточного для предотвращения чрезмерной неравномерности давления в воздухопроводе ТВ; чтобы преодолеть этот недостаток, даже при наличия радиосвязи блок управления 601 поддерживает запорный клапан 607, и, следовательно, ускорительный клапан 606, в состоянии соединения с воздухопроводом ТВ, активируясь только во время быстрого изменения давления, то есть только тогда, когда требуется дублирование динамических действий, выполняемых главной системой ГС; когда блок управления 601 удостоверился посредством процессов, эквивалентных тем, что описаны со ссылкой на блок-схему на Фиг. 9, что воздухопровод стабилизировался в значении, заданном главной системой ГС, он будет поддерживать запорный клапан 607 в отключенном состоянии, тем самым изолируя ускорительный клапан 606 от воздухопровода ТВ и, следовательно, позволяя давлению в нем меняться локально в кратчайшие возможные сроки в соответствии с изменениями давления, заданными главной системой ГС.
Блок-схема на Фиг. 10 описывает процесс управления тягой, выполняемый подчиненной системой ПС. Аналогично блок-схеме, изображенной на Фиг. 9, блок-схема на Фиг. 10 показывает, в частности, задачу, которая назначается периодически, например, каждые 100 мс. Специалисту в данной области техники известно, что эта блок-схема также может выполняться в бесконечном цикле при условии, что она может обеспечить стабильную периодичность выполнения, например, каждые 100 мс.
Таким образом, на основании блок-схемы на Фиг. 10 мы видим следующее:
• если на этапе 801 подтверждается наличие радиосвязи, происходит переход к этапу 802, на котором подчиненная система ПС выполняет любые команды по активации или отключению тяги, полученные от главной системы ГС, после чего происходит выход из задачи;
• если на этапе 801 обнаруживается отсутствие радиосвязи, то происходит переход к этапу 803, на котором осуществляется проверка, превышает ли давление в воздухопроводе ТВ заданное значение (5 бар ном. - ε), где ε может иметь значение, например, 0,5 бар: если давление меньше (5 бар ном. - ε), происходит переход к этапу 804, на котором блок управления 601 сбрасывает запрос на тягу для блока управления тягой 614 на ноль; и то, и другое действие выполняется в любом случае устройством 615, гарантируя, что при поступлении запроса на торможение система тяги немедленно прекратит создавать тяговое усилие;
• если на этапе 803 давление в воздухопроводе ТВ превышает заданное значение (номинальное значение 5 бар - ε), происходит переход к этапу 805, на котором проверяется, превышает ли запрашиваемое значение тяги значение  , причем, если не происходит активация тормозной системы, то в случае потери радиосигнала должна быть достигнута запрашиваемая тяга; если это так, то происходит переход к этапу 806, на котором запрашиваемое значение тяги, которое должно быть отправлено в блок управления тягой 614, уменьшается на такое значение, что создается градиент δ1, после чего задача завершается;
, причем, если не происходит активация тормозной системы, то в случае потери радиосигнала должна быть достигнута запрашиваемая тяга; если это так, то происходит переход к этапу 806, на котором запрашиваемое значение тяги, которое должно быть отправлено в блок управления тягой 614, уменьшается на такое значение, что создается градиент δ1, после чего задача завершается;
• если на этапе 805 обнаруживается, что запрашиваемое значение тяги не превышает значение , происходит переход к этапу 807, где проверяется, меньше ли запрашиваемое значение тяги, чем значение : если это так, то происходит переход к этапу 808, где запрашиваемое значение тяги, которое должно быть отправлено в блок управления тягой, увеличивается на такое значение, что создается градиент δ2, после чего задача завершается;
• если на этапе 807 значение запроса на тягу окажется меньше, чем значение , это означает, что значение запроса на тягу равно ; то есть подчиненный локомотив ПЛ обеспечивает тягу заданного значения на случай потери радиосигнала.
Разумеется, не изменяя принцип настоящего изобретения, можно значительно изменить описанные и изображенные варианты осуществления изобретения и детали конструкции, приведенные исключительно в виде неограничивающего примера, не выходя за пределы объема изобретения, описанного в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРМОЗНАЯ СИСТЕМА ЛОКОМОТИВА | 1998 |
|
RU2198810C2 |
| Двухтрубная тормозная система железнодорожного подвижного состава | 2020 |
|
RU2740624C1 |
| ВОЗДУХОРАСПРЕДЕЛИТЕЛЬ ДЛЯ КОСВЕННО ДЕЙСТВУЮЩИХ ПНЕВМАТИЧЕСКИХ ТОРМОЗОВ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 1994 |
|
RU2141416C1 |
| Одномерный воздушный тормоз | 1925 |
|
SU26720A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА УЧАСТКАХ С ЭЛЕКТРИЧЕСКОЙ ТЯГОЙ | 2020 |
|
RU2738487C1 |
| Тормозной вспомогательный кран локомотива | 1954 |
|
SU99496A1 |
| ВОЗДУХОРАСПРЕДЕЛИТЕЛЬ ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2248284C1 |
| Способ опробирования автотормозов в грузовых поездах и устройство для его реализации | 2019 |
|
RU2744643C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДОВ КОМПЛЕКСНАЯ | 2019 |
|
RU2732495C1 |
| Система управления автотормозами соединенных поездов | 1980 |
|
SU931544A1 |


Изобретение относится к тормозной автоматике на железнодорожном транспорте. Система управляет грузовым поездом (ЖДП), содержащим множество вагонов (В), главный локомотив (ГЛ), расположенный в головной части поезда (ЖДП), и один или несколько подчиненных локомотивов (ПЛ), распределенных по длине поезда (ЖДП). Поезд (ЖДП) оснащен пневматическим тормозным воздухопроводом ТВ, протянутым вдоль всего поезда (ЖДП). Главный локомотив (ГЛ) оборудован главной системой управления (ГС) для управления поездами (ЖДП) и по меньшей мере одним подчиненным локомотивом (ПЛ), оборудованным подчиненной системой управления (ПС), подконтрольной главной системе управления (ГС). Главная и подчиненные системы (ГС, ПС) могут взаимодействовать друг с другом по радиоканалу. Каждая подчиненная система (ПС) предназначена для управления тяговыми устройствами (614), устройствами для управления давлением в тормозном воздухопроводе (BP) (606-608) и устройствами для активации аварийного тормоза соответствующего подчиненного локомотива (ПЛ) и повторной передачи сигналов, описывающих состояние этих устройств подчиненного локомотива (ПЛ), в главную систему (ГС). Главная система (ГС) может интерпретировать команды тяги и команды торможения, отправляемые машинистом главного локомотива (ГЛ), и может передавать соответствующие команды подчиненным системам (ПС) в виде значений уставки тяги и значений уставки давления в тормозном воздухопроводе (ТВ) для их локального осуществления. Достигается возможность обеспечения ручного управления поездом в случае потери радиосвязи в режиме тяги и торможения без ограничений по времени, в ограниченных рабочих условиях и при пониженной скорости. 6 з.п. ф-лы, 10 ил.
1. Система управления грузовым железнодорожным поездом (ЖДП), содержащим множество вагонов (В), главный локомотив (ГЛ), расположенный в голове поезда (ЖДП), и один или несколько подчиненных локомотивов (ПЛ), распределенных по длине поезда (ЖДП), поезд (ЖДП) снабжен пневматическим тормозным воздухопроводом (ТВ), протянутым по всей длине поезда (ЖДП), причем главный локомотив (ГЛ) оборудован главной системой управления (ГС) для управления поезда (ЖДП), а, по меньшей мере, один подчиненный локомотив (ПЛ) оборудован подчиненной системой управления (ПС), получающей команды от главной системы управления (ГС) для управления поездом (ЖДП), упомянутые главная и подчиненные системы управления (ГС, ПС) выполнены с возможностью связи друг с другом по радиоканалу, причем подчиненная система (ПС) или каждая из подчиненных систем выполнена с возможностью управления тяговым устройством (614), система также включает в себя устройство управления (606-608) давлением в тормозном воздухопроводе (ТВ) и устройства аварийного тормоза для соответствующих подчиненных локомотивов (ПЛ), устройство для повторной передачи сигналов главной системы (ГС) о состоянии упомянутых устройств подчиненного локомотива (ПЛ), главная система (ГС) выполнена с возможностью интерпретации команд тяги и команд торможения, переданных машинистом главного локомотива (ГЛ), и для передачи соответствующих команд подчиненной системе (ПС) в случае, когда значения уставки тяги и значения уставки давления в тормозном воздухопроводе (ТВ) должны быть реализованы локально, причем упомянутая главная система (ГС) дополнительно может осуществлять интерпретацию команд аварийного торможения, передаваемых машинистом главного локомотива (ГЛ) или бортовыми системами главного локомотива (ГЛ), и передавать соответствующие команды на локальную активацию аварийного тормоза подчиненным системам (ПС);
система управления, отличающаяся тем, что в случае потери радиосвязи между главной системой (ГС) и подчиненной системой(-ами) (ПС) каждая подчиненная система управления (ПС) способна выполнять следующие операции:
- производить анализ колебаний давления в тормозном воздухопроводе (ТВ) и потока подаваемого в него воздуха;
- при наличии отрицательного градиента давления в тормозном воздухопроводе (ТВ), подключать к нему устройство управления (606), обеспечивающее возможность активного регулирования давления в упомянутом воздухопроводе (ТВ), и использовать упомянутое устройство (606) для того, чтобы создать один или несколько последовательных отрицательных перепадов заданного значения давления в тормозном воздухопроводе (ТВ);
- после активации каждой отрицательной уставки давления в тормозном воздухопроводе (ТВ) контролировать поток воздуха, подаваемый в тормозной воздухопровод (ТВ), и изолировать упомянутое устройство управления (606) от воздухопровода (ТВ) при обнаружении локальной подачи воздуха в него (ТВ) с помощью упомянутого устройства управления (606);
- после активации каждого отрицательного перепада значения уставки тормозного давления в отсутствии локальной подачи воздуха в тормозной воздухопровод (ТВ) посредством упомянутого устройства управления (606) изолировать указанное устройство (606) от тормозного воздухопровода (ТВ) по истечении тайм-аута, начатого, когда устройство управления (606) было соединено с воздухопроводом (ТВ), и
- при наличии положительного градиента давления в тормозном воздухопроводе (ТВ) удерживать упомянутое устройство управления (606) изолированным от тормозного воздухопровода (ТВ).
2. Система по п. 1, в которой амплитуды отрицательных перепадов значений уставки давления в тормозном воздухопроводе зависят от абсолютного значения и градиента упомянутого давления в тормозном воздухопроводе (ТВ) и значения амплитуд заранее сохранены в соответствующей подчиненной системе (ПС).
3. Система по п. 2, в которой опорное значение давления в тормозном воздухопроводе (ТВ), соответствующее условию отключения тормозной системы, определяется заранее, а затем обновляется.
4. Система по п. 1, в которой каждая подчиненная подсистема (ПС) предназначена для дополнительного соединения упомянутого устройства управления (606) с тормозным воздухопроводом (ТВ) при наличии радиосвязи между главной системой (ГС) и подчиненной системой (ПС) и при получении главной системой (ГС) запроса на изменение давления; подчиненная система (ПС), выполняющая изменение давления путем соответствующего изменения значения уставки давления тормозного воздухопровода, обнаружение завершения действия, возникающего в результате изменения значения уставки давления в тормозном воздухопроводе, и изоляцию устройства управления (606) от тормозного воздухопровода (ТВ).
5. Система по одному из предшествующих пунктов, в которой, когда значение уставки тяги превышает заданное значение (γ) в диапазоне от нуля до заданного максимально допустимого значения, то каждая подчиненная система (ПС) уменьшает указанное значение уставки тяги до упомянутого указанного заранее значения (γ) с заданным градиентом (Δ1);
в которой, когда значение уставки тяги ниже, чем указанное заданное значение (γ), каждая подчиненная система (ПС) увеличивает значение уставки тяги до упомянутого указанного заранее значения (γ) со вторым заранее заданным градиентом (Δ2); а также
в которой, когда одна из подчиненных систем (ПС) обнаруживает условие торможения поезда (ЖДП), то она сбрасывается до нуля и сохраняет нулевое значение заданной величины тяги до тех пор, пока операция торможения не прекратится.
6. Система по п. 5, в которой заданное значение (γ) уставки тяги и значения упомянутых первого и второго градиентов (Δ1, Δ2) сохраняются в памяти каждой подчиненной системы (ПС).
7. Система по п. 5, в которой заданное значение (γ) уставки тяги и значения упомянутых первого и второго градиентов (Δ1, Δ2) отображаются в каждой подчиненной системе (ПС) в соответствии с характеристиками программ миссий и выбираются на основании географического положения поезда (ЖДП), определенного системой определения местоположения.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| 0 |
|
SU153536A1 |

