ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее раскрытие относится в целом к карманным электронным устройствам и в частности к использованию таких устройств для измерения длины пути.
УРОВЕНЬ ТЕХНИКИ
Осуществление измерений является давней сложной задачей. Измерения конкретного объекта или пространства могут требоваться для сравнения с измерениями другого объекта или пространства, которые могут быть расположены в отдельном местоположении. Например, такой объект, как предмет одежды или предмет мебели, может быть представлен в сети, через Интернет и, в некоторых примерах, через веб-обозреватель на телефоне, персональном компьютере, телевизоре и/или другом подключенном к Интернету устройстве без возможности измерить объект непосредственно, чтобы определить, насколько хорошо объект подойдет, например, человеку или конкретному пространству в комнате, которое также должно быть измерено.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее раскрытие относится к способу измерения длины пути с использованием карманного электронного устройства, содержащего датчик ускорения. В настоящий момент раскрываемый способ может быть полезен, чтобы обеспечить возможность измерения части тела и/или доступной одежды с использованием, например, смартфона.
Согласно одному аспекту в настоящий момент раскрываемого изобретения, обеспечен способ измерения пути на трехмерном (3-D) объекте с использованием карманного электронного устройства, содержащего датчик ускорения. Способ включает в себя процедуры использования процессора для исполнения этапов, на которых получают измерения ускорения карманного электронного устройства, в то время как карманным электронным устройством осуществляют обнос по пути в первом направлении, тем самым получая участки ускорения для трех измерений для первого направления; идентифицируют начальную и конечную точку перемещения; и осуществляют интегрирование между начальной и конечной точками перемещения, чтобы найти длину.
В качестве дополнения к вышеупомянутым признакам, способ согласно этому аспекту в настоящий момент раскрываемого изобретения может опционально содержать один или несколько из признаков (i)-(xxi) ниже в любой желаемой комбинации или перестановке:
i. Способ включает в себя этап, на котором получают измерения ускорения во втором направлении, тем самым получая участки ускорения для трех измерений для второго направления.
ii. Второе направление симметрично противоположно первому направлению.
iii. Второе направление по существу то же самое, что и первое направление.
iii. Способ включает в себя этапы, на которых идентифицируют точку по существу посередине между двумя измерениями и разбивают измерение на две части в средней точке.
iv. Способ включает в себя этап, на котором идентифицируют начальную и конечную точку перемещения для второй части.
v. Способ включает в себя этап, на котором осуществляют интегрирование между начальной и конечной точками перемещения для второй части, чтобы найти длину.
vi. Способ включает в себя этап, на котором вычисляют окончательную длину на основе длины первой части и длины второй части.
vii. Идентификация начальной и конечной точки перемещения выполняется с использованием по меньшей мере одного типа весового типа.
viii. Идентификация начальной и конечной точки перемещения для второго измерения выполняется с использованием по меньшей мере одного типа весового типа.
ix. Весовой тип, используемый для второй части, отличен от весового типа, используемого для первой части.
x. Весовой тип, используемый для второй части, является по существу тем же самым весовым типом, используемым для первой части.
xi. Весовой тип включает в себя любое одно из: среднеквадратического отклонения; углового коэффициента; и полного ускорения.
xii. Вычисление окончательной длины на основе двух длин выполняется путем усреднения.
xiii. Способ включает в себя этап, на котором используют длину первой части и длину второй части для указания измерения качества.
xiv. Способ включает в себя этап, на котором измеряют ориентацию при помощи датчика ориентации.
xv. Способ включает в себя этап, на котором калибруют измерения ускорения, чтобы компенсировать потенциальную неточность ориентации.
xvi. Способ включает в себя этап, на котором измеряют ускорение при помощи датчика ускорения.
xvii. Способ включает в себя этап, на котором калибруют карманное электронное устройство на истинный север или магнитный север.
xviii. Способ включает в себя этап, на котором принимают ввод пользователя, указывающий начало и конец перемещения-обноса, выполняемого карманным электронным устройством, по пути.
xix. Карманное электронное устройство является смартфоном.
xx. Способ включает в себя этап, на котором используют данные углов и данные ориентации, чтобы компенсировать измерения ускорения в отношении эффекта гравитации.
xxi. Способ включает в себя этап, на котором преобразуют данные измерения в двоичные данные, чтобы идентифицировать начальную и конечную точку перемещения.
Согласно другому аспекту в настоящий момент раскрываемого изобретения, обеспечены долговременные машиночитаемые носители, хранящие машиночитаемые инструкции. Долговременные машиночитаемые носители, хранящие машиночитаемые инструкции, при исполнении карманным электронным устройством, для которого осуществляется обнос по пути на трехмерном объекте, который должен быть измерен, побуждают карманное электронное устройство измерять длину пути посредством этапов, на которых: получают измерения ускорения карманного электронного устройства, в то время как карманным электронным устройством осуществляют обнос по пути в первом направлении, тем самым получая участки ускорения для трех измерений для первого направления; идентифицируют начальную и конечную точки перемещения; и осуществляют интегрирование между начальной и конечной точками перемещения, чтобы найти длину.
Согласно другому аспекту в настоящий момент раскрываемого изобретения, обеспечено карманное электронное устройство, сконфигурированное с возможностью измерять путь на трехмерном объекте. Карманное электронное устройство включает в себя: датчик ускорения, сконфигурированный с возможностью обнаруживать ускорение карманного электронного устройства; компьютерную память; и процессор, функционально связанный с памятью и с датчиком ускорения. Память включает в себя инструкции для побуждения процессора получать измерения ускорения карманного электронного устройства, в то время как карманным электронным устройством осуществляют обнос по пути в первом направлении, тем самым получая участки ускорения для трех измерений для первого направления; идентифицировать начальную и конечную точку перемещения; и осуществлять интегрирование между начальной и конечной точками перемещения, чтобы найти длину.
Согласно другому аспекту в настоящий момент раскрываемого изобретения, обеспечен модуль измерения для карманного электронного устройства. Модуль измерения сконфигурирован с возможностью измерять путь на трехмерном объекте и включает в себя: пользовательский интерфейс, сконфигурированный с возможностью принимать ввод пользователя, указывающий начало и конец перемещения-обноса, выполняемого карманным электронным устройством, по пути; блок приемника данных, сконфигурированный с возможностью получать от датчика ускорения участки ускорения карманного устройства, причем участки ускорения указывают ускорение карманного электронного устройства, в то время как карманным электронным устройством осуществляют обнос по пути в первом направлении, тем самым получая участки ускорения для трех измерений для первого направления; блок обработки данных, сконфигурированный с возможностью: идентифицировать начальную и конечную точку перемещения для каждой из двух частей; и осуществлять интегрирование между начальной и конечной точками перемещения, чтобы найти длину. Модуль измерения включает в себя блок вывода, сконфигурированный с возможностью выводить окончательную длину для пользователя.
Долговременные машиночитаемые носители, хранящие машиночитаемые инструкции, карманное электронное устройство и модуль измерения, раскрываемые в соответствии с раскрываемым в настоящий момент изобретением, могут опционально содержать один или несколько из признаков (i)-(xxi), перечисленных выше в отношении способа, с необходимыми изменениями в любой желаемой комбинации или перестановке.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для того чтобы лучше понять изобретение, которое раскрывается здесь, и проиллюстрировать, как оно может осуществляться на практике, далее будут описаны варианты осуществления исключительно в качестве неограничивающего примера со ссылками на сопроводительные чертежи, на которых:
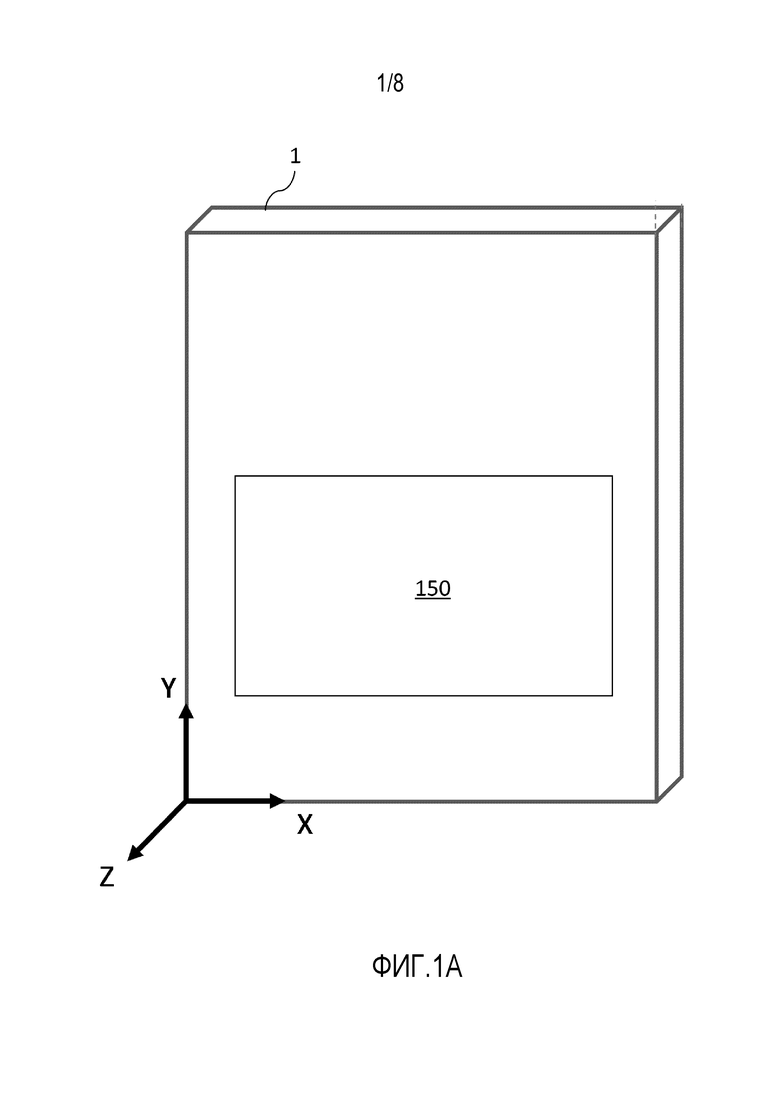
фиг.1A изображает функциональную структурную схему, схематически представляющую карманное электронное устройство, сконфигурированное с возможностью измерять длину пути, согласно вариантам осуществления настоящего раскрытия;
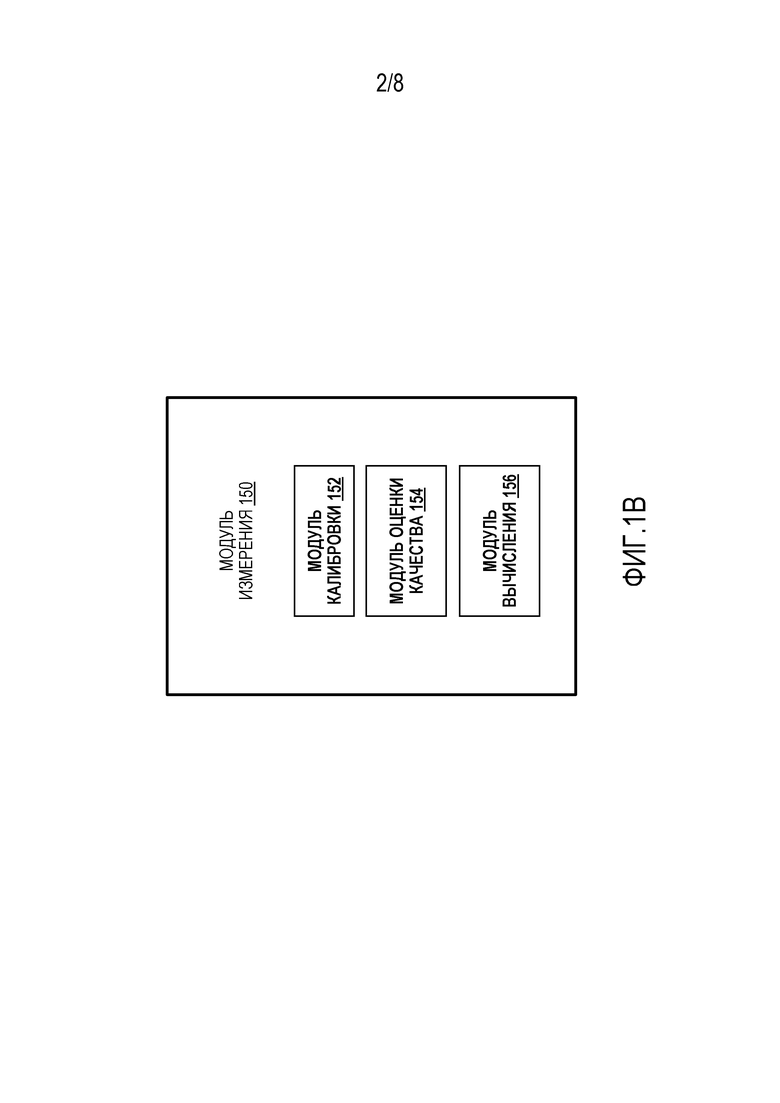
фиг.1B изображает функциональную структурную схему, иллюстрирующую модуль измерения карманного электронного устройства с фиг.1A согласно вариантам осуществления настоящего раскрытия;
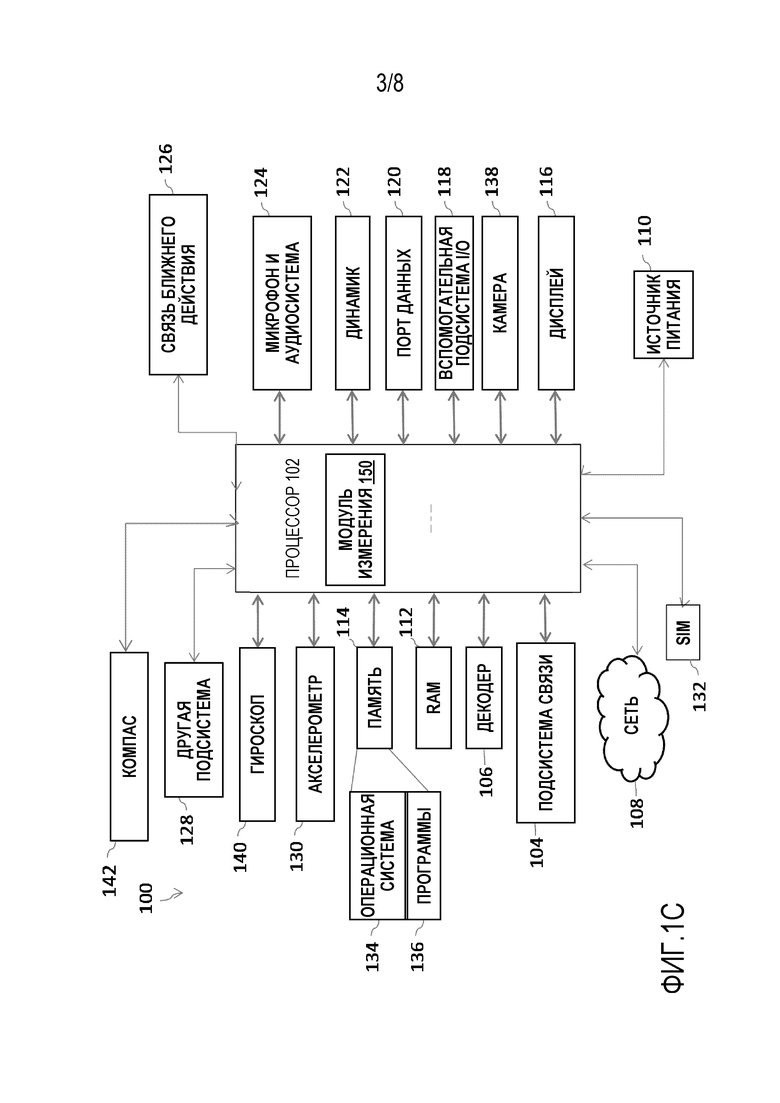
фиг.1C изображает функциональную структурную схему, иллюстрирующую различные блоки и модули карманного электронного устройства с фиг.1A согласно вариантам осуществления настоящего раскрытия;
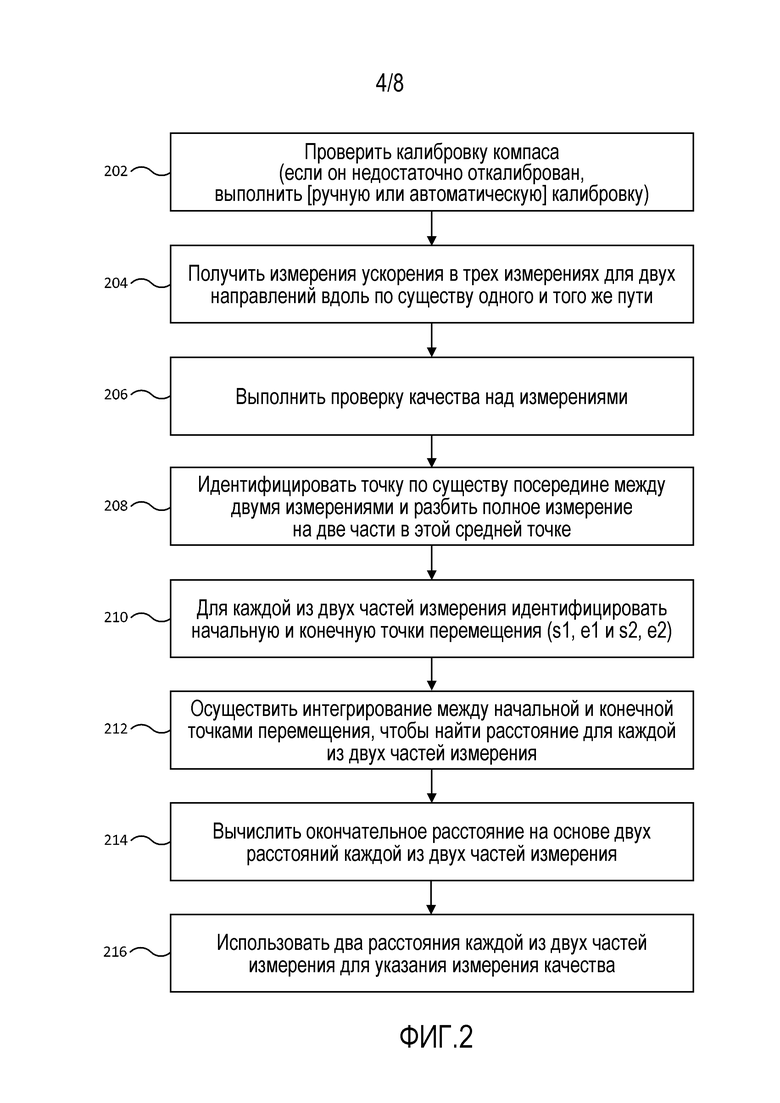
фиг.2 изображает блок-схему, иллюстрирующую способ вычисления длины пути согласно вариантам осуществления настоящего раскрытия;
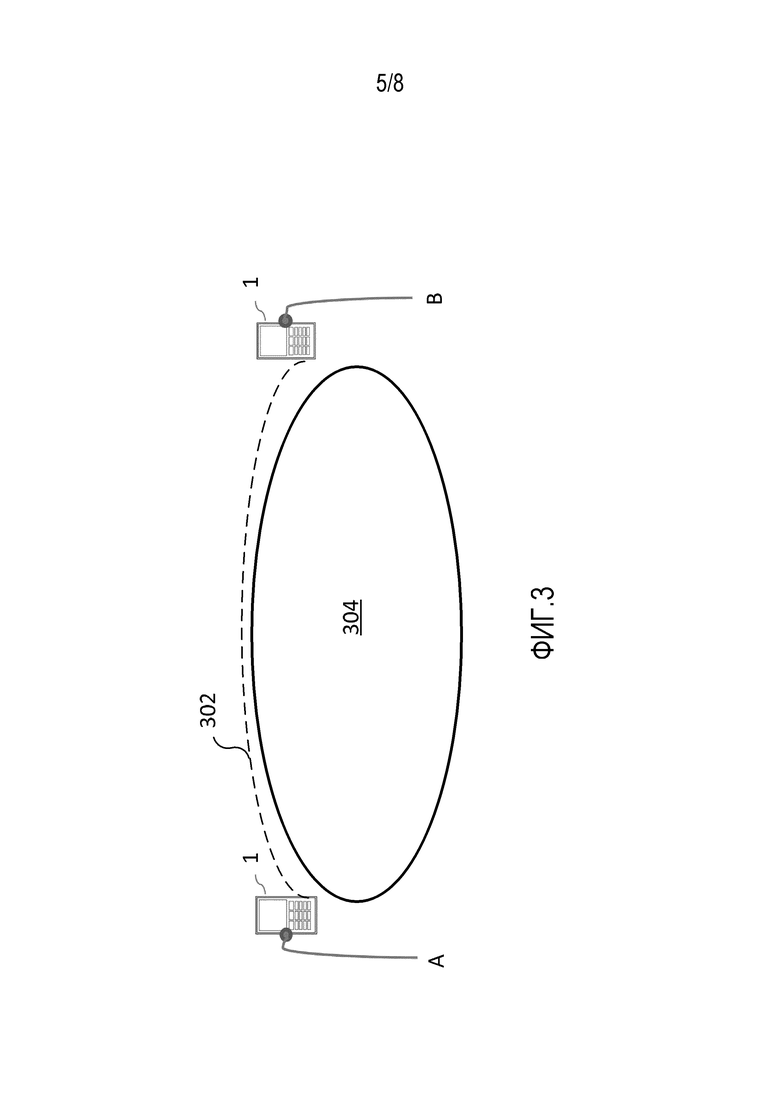
фиг.3 изображает перемещение-обнос, выполняемое карманным электронным устройством, в способе вычисления длины пути согласно вариантам осуществления настоящего раскрытия;
фиг.4 изображает блок-схему, иллюстрирующую способ получения измерений согласно вариантам осуществления настоящего раскрытия;
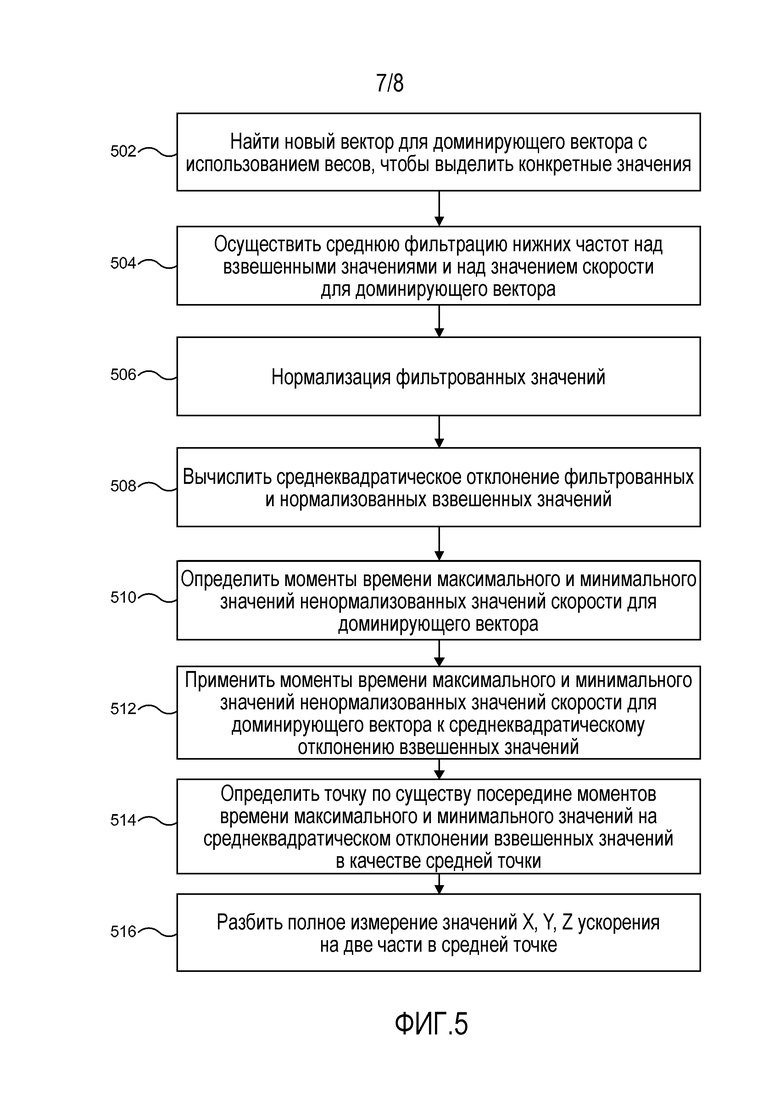
фиг.5 изображает блок-схему, иллюстрирующую способ идентификации точки по существу посередине между двумя измерениями и разбиения полного измерения на две части в этой средней точке согласно вариантам осуществления настоящего раскрытия; и
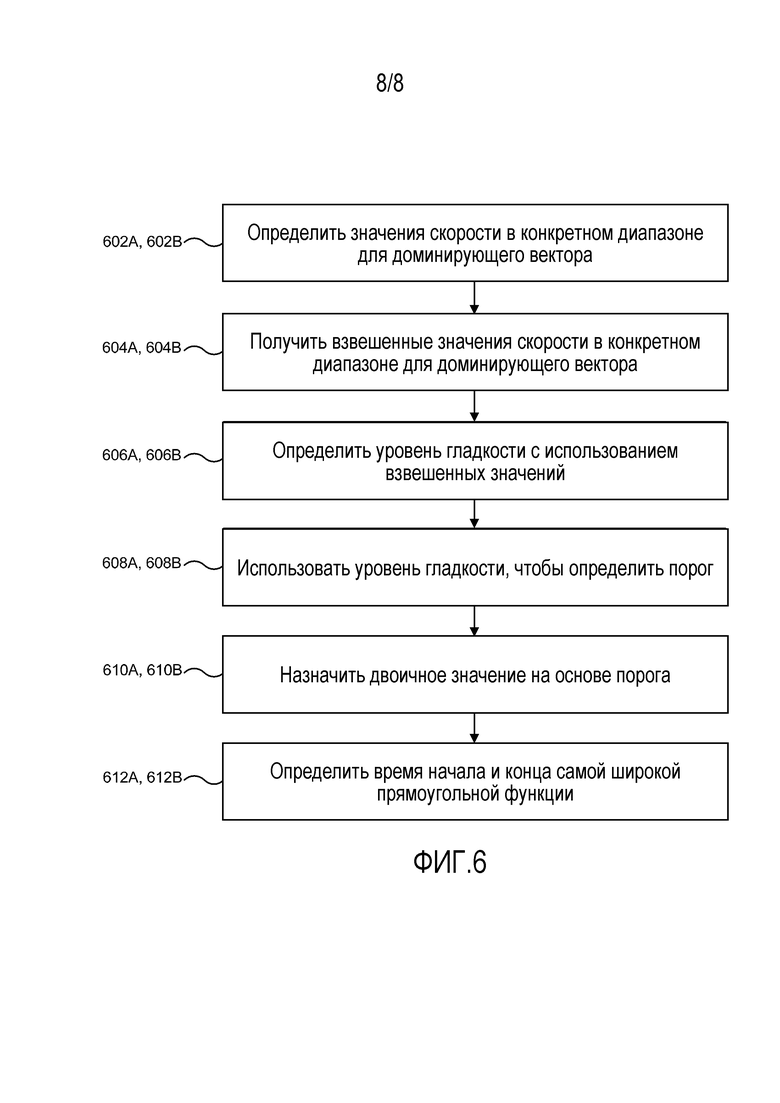
фиг.6 изображает блок-схему, иллюстрирующую способ идентификации начальной и конечной точки перемещения для каждой из двух частей согласно вариантам осуществления настоящего раскрытия.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Здесь описываются некоторые примеры систем и способов, полезных для измерения длины пути на 3-D-объекте.
В настоящей заявке следующие термины и их производные могут пониматься в свете нижеприведенных объяснений:
Термин путь может ссылаться на прямую и/или кривую линию.
Термин обнос можно понимать как ссылающийся на прямолинейное и/или криволинейное перемещение карманного электронного устройства от начальной точки к конечной точке, причем карманное электронное устройство перемещается по существу в одном направлении, параллельном пути. В некоторых примерах карманное электронное устройство может скользить по пути от исходной точки к конечной точке. В некоторых примерах карманное электронное устройство может проноситься над путем. В некоторых примерах карманное электронное устройство может частично проноситься над путем и частично соприкасаться с путем. В некоторых примерах карманным электронным устройством может осуществляться обнос от начальной точки к конечной точке по пути и затем обратно от конечной точки к начальной точке по существу по тому же самому пути в противоположном направлении. В некоторых примерах карманное электронное устройство может скользить по пути от начальной точки к конечной точке и затем снова от начальной точки к конечной точке по этому пути.
Ввиду природы перемещения-обноса следует понимать, что обнаруженное ускорение, представляющее интерес, может по существу быть прямолинейным и/или криволинейным ускорением, проецируемым на путь. Иными словами, ускорение, представляющее интерес, может быть проекцией векторов ускорения на путь. Кроме того, перемещение-обнос может быть таким, чтобы карманное электронное устройство останавливалось в исходной точке и в конечной точке и снова в исходной точке.
В последующем подробном описании множество конкретных подробностей излагается для того, чтобы обеспечить исчерпывающее понимание изобретения. Однако специалистам в данной области техники будет понятно, что некоторые примеры изобретения могут осуществляться на практике без этих конкретных подробностей. В других случаях широко известные способы, процедуры и компоненты не были описаны подробно, чтобы не делать описание менее ясным.
Используемые здесь фразы "например", "такой как", "в качестве примера" и их варианты описывают неограничивающие примеры в настоящий момент раскрываемого изобретения. Ссылка в техническом описании на "один пример", "некоторые примеры", "другой пример", "другие примеры", "один вариант", "некоторые варианты", "другой вариант", "другие варианты", "один случай", "некоторые случаи", "другой случай", "другие случаи" или их варианты означает, что конкретный описанный признак, структура или характеристика, описанная в связи с вариантом(-ами) осуществления, включены в по меньшей мере один пример в настоящий момент раскрываемого изобретения. Таким образом, возникновение одного и того же термина не обязательно ссылается на один и тот же пример.
Следует понимать, что конкретные признаки, структуры и/или характеристики в настоящий момент раскрываемого изобретения, которые для ясности описываются в контексте отдельных примеров, могут также быть обеспечены в комбинации в одном примере. И наоборот, различные признаки, структуры и/или характеристики в настоящий момент раскрываемого изобретения, которые в целях краткости описываются в контексте одного примера, могут также быть обеспечены отдельно или в любой подходящей подкомбинации.
Если конкретным образом не указано обратное, как ясно из последующих рассмотрений, следует понимать, что на протяжении рассмотрений технического описания использование таких терминов, как "измерение", "получение", "идентификация", "разбиение", "интегрирование", "вычисление", "использование", "взятие", "нормализация", "калибровка", "поиск", "прием", "хранение" или подобных, может ссылаться на действие(-я) и/или процесс(ы) любой комбинации программных средств, аппаратных средств и/или программно-аппаратных средств. Например, эти термины могут ссылаться в некоторых случаях на действие(-я) и/или процесс(ы) программируемой машины, которая манипулирует и/или преобразует данные, представленные в качестве физических, таких как электронные, величин внутри реестров и/или средств памяти программируемой машины, в другие данные, подобным образом представленные в качестве физических величин внутри средств памяти, реестров и/или другого такого хранилища информации, элемента(-ов) передачи и/или отображения программируемой машины.
Если конкретным образом не указано обратное, как ясно из последующих рассмотрений, следует понимать, что на протяжении рассмотрений технического описания использование таких терминов, как "измерение", "получение", "идентификация", "разбиение", "интегрирование", "вычисление", "использование", "взятие", "нормализация", "калибровка", "поиск", "прием", "хранение" или подобных, включает в себя действия и/или процессы компьютера, которые манипулируют и/или преобразуют данные в другие данные, причем упомянутые данные представлены в виде физических величин, например таких, как электронные величины, и/или упомянутые данные представляют физические объекты.
На чертежах и в описаниях, излагаемых здесь, идентичные ссылочные позиции указывают те компоненты, которые являются общими для различных вариантов осуществления или конфигураций. Элементы на чертежах не обязательно нарисованы в масштабе.
Как карманное электронное устройство 1, так и модуль 150 измерения являются компьютеризованными устройствами, содержащими или иным образом операционно соединенными с по меньшей мере одним компьютерным обрабатывающим блоком, сконфигурированным для исполнения различных операций, как описано ниже. Термины "обрабатывающий блок", "компьютер", "обрабатывающее устройство" или их вариации должны широко толковаться, чтобы покрывать любые виды электронных устройств с возможностями обработки данных, включающие в себя, в качестве неограничивающего примера, персональный компьютер, сервер, вычислительную систему, устройство связи, процессор (например, процессор цифровых сигналов (DSP), микроконтроллер, программируемую пользователем вентильную матрицу (FPGA), специализированную интегральную цепь (ASIC) и т. д.), любое другое электронное вычислительное устройство и/или любую их комбинацию.
В вариантах осуществления в настоящий момент раскрываемого изобретения меньше, больше и/или другие этапы относительно изображенных на фиг.2, 4, 5 и 6 могут исполняться. В вариантах осуществления в настоящий момент раскрываемого изобретения один или несколько этапов, иллюстрируемых фиг.2, 4, 5 и 6, могут исполняться в другом порядке, и/или одна или несколько групп этапов могут исполняться одновременно.
Фиг.1A, 1B и 1C изображают общую схему архитектуры системы в соответствии с вариантом осуществления в настоящий момент раскрываемого изобретения. Функциональные элементы на фиг.1A, 1B и 1C могут быть централизованы в одном местоположении или распределены по более чем одному местоположению. В других вариантах осуществления в настоящий момент раскрываемого изобретения система может содержать меньше, больше и/или другие (например, распределенные другим образом) функциональные элементы относительно изображенных на фиг.1A, 1B и 1C. Например, деление в карманном электронном устройстве 1 и модуле 150 измерения на определенные функциональные элементы выполняется только в качестве примера и не должно трактоваться как ограничивающее каким-либо образом. Например, функциональные элементы, нарисованные как вложенные в другие функциональные элементы, могут в других случаях быть спроектированы как независимые функциональные блоки. В конкретном примере модуль 150 измерения может быть изготовлен согласно различным проектированиям, включающим в себя: в качестве независимого блока, операционно соединяемого с различными другими функциональными блоками; в качестве неотъемлемой части карманного электронного устройства 1; и в качестве неотъемлемой части процессора 102.
Ссылка теперь будет сделана на фиг.1A. Фиг.1A изображает схематическое представление карманного электронного устройства 1, сконфигурированного с возможностью измерять длину пути, согласно в настоящий момент раскрываемому изобретению. В некоторых примерах карманное электронное устройство 1 может иметь по существу форму прямоугольного параллелепипеда. Ребра карманного электронного устройства 1 могут по существу определять ортогональный базис, содержащий три ортогональных оси X, Y, Z карманного электронного устройства 1. Согласно идее, раскрываемой здесь, карманное электронное устройство 1 может содержать модуль 150 измерения.
Ссылка теперь будет сделана на фиг.1B. Фиг.1B изображает функциональную структурную схему, иллюстрирующую модуль 150 измерения карманного электронного устройства 1 с фиг.1A согласно одному примеру в настоящий момент раскрываемого изобретения. Модуль 150 измерения сконфигурирован с возможностью выполнять процесс измерения, раскрываемый здесь. Модуль 150 измерения может дополнительно содержать модуль 152 калибровки; модуль 154 оценки качества; и модуль 156 вычисления.
Модуль 152 калибровки сконфигурирован с возможностью выполнять калибровки, как раскрывается здесь. Модуль 154 оценки качества сконфигурирован с возможностью выполнять оценки качества, как раскрывается здесь. Модуль 156 вычисления сконфигурирован с возможностью вычисления длины пути, как раскрывается здесь. Модуль 150 измерения, модуль 152 калибровки, модуль 154 оценки качества и модуль 156 вычисления могут быть интегрированы в составе процессора (например, процессора 102, описанного ниже со ссылками на фиг.1C) и/или памяти. В качестве альтернативы, модуль 150 измерения, модуль 152 калибровки, модуль 154 оценки качества и модуль 156 вычисления могут быть внешними по отношению к процессору и операционно соединенными с ним. Модули на фиг.1B могут быть централизованы в одном местоположении или распределены по более чем одному местоположению. Более подробное описание различных операций различных модулей обеспечено ниже.
Ссылка теперь будет сделана на фиг.1C. Фиг.1C изображает функциональную структурную схему карманного электронного устройства 1 с фиг.1A согласно примерам в настоящий момент раскрываемого изобретения. Фиг.1C изображает высокоуровневую функциональную структурную схему электронной сборки 100 для оперирования карманным электронным устройством 1 согласно настоящему раскрытию. В некоторых примерах карманное электронное устройство 1 может быть смартфоном, компьютерным планшетом или умными часами. Электронная сборка 100 может содержать процессор 102, который может управлять общей операцией карманного электронного устройства 1. В некоторых примерах функции связи, обеспечиваемые карманным электронным устройством 1, могут включать в себя передачу голоса, данных и команд, которая может осуществляться подсистемой 104 связи. Подсистема 104 связи может быть использована, например, чтобы инициировать и поддерживать активный голосовой вызов или сеанс передачи данных. Подсистема 104 связи может включать в себя различные комбинации аппаратных средств, программных средств и программно-аппаратных средств, чтобы выполнять различные специализированные функции.
Данные, принятые карманным электронным устройством 1, могут обрабатываться, что включает в себя распаковку и дешифрование посредством декодера 106. Подсистема 104 связи может принимать сообщения от и посылать сообщения по беспроводной сети 108.
Источник 110 питания может обеспечивать питание для операции и/или зарядки карманного электронного устройства 1 и может осуществляться, например, одним или несколькими перезаряжаемыми аккумуляторами или портом к внешнему источнику питания, причем такой источник питания обеспечивает надлежащее питание всем компонентам электронной сборки 100.
Процессор 102 может взаимодействовать с другими компонентами, такими как оперативная память (RAM) 112, энергостойкая память 114, дисплей 116, вспомогательная подсистема 118 ввода/вывода (I/O), порт 120 данных, динамик 122, микрофон и аудиосистема 124, подсистема 126 связи ближнего действия и другие подсистемы 128. В некоторых примерах модуль 150 измерения интегрирован с процессором 102 или операционно соединен с ним. Пользователь может вводить данные и оперировать функциями карманного электронного устройства 1 посредством устройства ввода данных, объединенного с процессором 102. Устройства ввода данных могут включать в себя, например, одно или несколько из: кнопок, клавиатуры, сенсорного экрана или чувствительного к жестам пользовательского интерфейса. Устройства ввода данных могут дополнительно включать в себя графический пользовательский интерфейс, воспроизводимый на дисплее 116, который может использовать прикосновения и жесты, обнаруженные чувствительным к прикосновению верхним слоем на дисплее 116. Процессор 102 может быть сконфигурирован с возможностью взаимодействовать с клавиатурой и/или чувствительным к прикосновению верхним слоем посредством электронного средства управления (представленного на фиг.1C элементом других подсистем 128). В составе пользовательского интерфейса информация, такая как текст, знаки, символы, изображения, пиктограммы и другие элементы, которые могут отображаться или визуализироваться на карманном электронном устройстве 1, могут отображаться на дисплее 116. Процессор 102 и память 104 могут быть либо отделены друг от друга в отдельных блоках, либо интегрированы друг с другом в одном блоке, например печатной плате, напечатанной с инструкциями.
Чтобы идентифицировать и аутентифицировать абонента для получения доступа к беспроводной сети 108, карманное электронное устройство 1 может использовать карту 132 модуля идентификации абонента (SIM). В качестве альтернативы, информация идентификации пользователя может быть запрограммирована в память 114.
Принятый сигнал, такой как текстовое сообщение, сообщение электронной почты или загрузка веб-страницы, может обрабатываться подсистемой 104 связи и вводиться в процессор 102. Процессор 102 может обрабатывать принятый сигнал для вывода на дисплей 116 и/или к вспомогательной подсистеме 118 I/O. Пользователь беспроводного устройства может генерировать элементы данных, например сообщения электронной почты, содержащие фотографию, которые могут передаваться по беспроводной сети 108 через подсистему 104 связи. Для голосовой связи общая операция карманного электронного устройства 1 может быть подобной. Динамик 122 может быть использован, чтобы выводить звуковую информацию, преобразованную из электрических сигналов, и микрофон и аудиосистема 124 могут быть использованы, чтобы преобразовывать звуковую информацию в электрические сигналы для обработки.
Подсистема 138 камеры может включать в себя множество аппаратных, программных и программно-аппаратных модулей, которые необходимы, чтобы захватывать данные изображения (например, визуальные данные). Примеры данных изображения включают в себя неподвижные фотографии и видеокадры, включенные в подвижные изображения файла видеоданных. Например, подсистема 138 камеры может включать в себя объектив 140, датчик 142 изображений и средство 144 управления позицией объектива. В конкретных примерах датчик 142 изображений может быть камерой или 3-D-камерой.
Карманное электронное устройство 1 может дополнительно содержать один или несколько акселерометров 130 (также называемых датчиком(-ами) ускорения). Процессор 102 может быть операционно соединен с акселерометрами 130, которые могут быть использованы, чтобы обнаруживать направление гравитационных сил и вводимых пользователем сил ускорения.
Процессор 102 может в общем случае иметь возможность операции, чтобы объединяться с одним или несколькими акселерометрами 130, чтобы обеспечить возможность вычисления или оценки длины пути согласно идеям, раскрываемым здесь. Каждый из одного или нескольких акселерометров 130 имеет возможность операции, чтобы измерять ускорение и обеспечивать данные, указывающие измеренное ускорение. Согласно некоторым примерам, один или несколько из акселерометров 130 могут иметь возможность операции, чтобы выводить аналоговый сигнал, соответствующий измерению ускорения. Например, каждый акселерометр 130 может выводить аналоговый сигнал напряжения, который пропорционален измеренным ускорениям. В некоторых примерах один или несколько акселерометров 130 могут включать в себя любые цифровые и аналоговые компоненты с возможностью операции, чтобы генерировать сигнал, соответствующий измеренному ускорению. Один или несколько акселерометров 130 могут быть любым из пружинного устройства, устройства с сервоприводом, тензометрического устройства, резонансного устройства и т. п. В некоторых примерах один или несколько акселерометров 130 могут быть сконфигурированы с возможностью измерять ускорения в трех перпендикулярных направлениях, для каждой из ортогональных осей X, Y, Z карманного электронного устройства 1.
Карманное электронное устройство 1 дополнительно содержит один или несколько гироскопов 140 (также называемых датчиком(-ами) ориентации) и компас 142, такой как магнитометр, который может быть использован, чтобы обнаруживать ориентацию карманного электронного устройства.
Согласно некоторым примерам, карманное электронное устройство 1 может включать в себя операционную систему 134 и программные продукты 136, которые могут исполняться процессором 102. Операционная система 134 и программные продукты 136 могут храниться, например, в энергостойком, обновляемом формате, таком как память 114. Дополнительные приложения или программы могут загружаться в карманное электронное устройство 1 через беспроводную сеть 108, вспомогательную подсистему 118 I/O, порт 120 данных, подсистему 126 связи ближнего действия или любую другую подсистему 128, подходящую для переноса программных файлов.
Программные продукты 136 могут также включать в себя графический интерфейс пользователя (GUI) для взаимодействия с пользователем и модуль для вычисления длины пути. Каждый из этих программных модулей может побуждать различные аппаратные и программные ресурсы внутри карманного электронного устройства 1 исполнять функцию. Дополнительно, функции, описанные в настоящем раскрытии, могут осуществляться в различных частях электронной сборки 100 независимо от того, являются ли такие части программными модулями или же специализированными аппаратными средствами и программно-аппаратными модулями. Во многих случаях может быть возможно осуществить одну и ту же функцию в более чем одной части электронной сборки 100.
В конкретных примерах карманное электронное устройство 1 может иметь возможность осуществления связи по линии связи с другими компьютерными обрабатывающими устройствами (не показаны), выполненными с возможностью помогать обрабатывать данные. Например, умные часы могут быть использованы в качестве устройства измерения, в то время как вычисления будут выполняться на смартфоне или планшете, который соединяется с умными часами по линии связи. Некоторые операции могут выполняться удаленным образом этими обрабатывающими устройствами. Модули на фиг.1C могут быть централизованными в одном местоположении или распределенными по более чем одному местоположению. В некоторых примерах операции различных модулей могут осуществляться удаленным образом, например, на удаленном сервере. Например, в настоящий момент раскрываемое изобретение дополнительно предполагает сервер, соединенный с устройством измерения (например, смартфоном) посредством линии удаленной связи, такой как Интернет, и сконфигурированный с возможностью принимать от устройства измерения информацию измерения и выполнять различные вычисления, раскрываемые здесь. Результаты вычислений могут быть посланы сервером обратно к устройству измерения для отображения и просмотра пользователем.
Ссылка теперь будет сделана на фиг.2. Фиг.2 изображает блок-схему, иллюстрирующую операции, осуществляемые для вычисления расстояния длины пути на (поверх) трехмерном (3-D) объекте, согласно примерам в настоящий момент раскрываемого изобретения. Операции, описанные со ссылками на фиг.2, могут исполняться карманным электронным устройством 1, описанным выше со ссылками на фиг.1A, 1B и 1C. Однако следует заметить, что конкретное проектирование, показанное на этих чертежах, предназначено только для примера, и его не следует трактовать как ограничивающее.
На блоке 202 компас карманного электронного устройства проверяется на калибровку в отношении истинного севера или магнитного севера. Согласно одному примеру, магнит или магнитометр вместе с гироскопом внутри карманного электронного устройства 1 используются в качестве компаса 142, чтобы определять ориентацию карманного электронного устройства 1 относительно земли.
Процедура предварительной калибровки может осуществляться модулем 152 калибровки, чтобы проверить компас 142 в карманном электронном устройстве 1 и определить, достаточно ли компас 142 откалиброван на истинный север или магнитный север. В качестве дополнения к определению текущего уровня калибровки, в течение процедуры предварительной калибровки может проверяться, когда предыдущая калибровка была выполнена на карманном электронном устройстве 1. Если уровень калибровки недостаточен и/или время с момента, когда предыдущая калибровка была выполнена, больше конкретного предварительно определенного периода времени, то у пользователя может быть запрошено выполнить ручную калибровку. Пользователю может быть обеспечена подсказка и инструкция, как выполнить калибровку. В конкретных примерах карманное электронное устройство 1 может автоматически калиброваться, чтобы установить компас 142 на карманном электронном устройстве 1 на истинный север или магнитный север с использованием модуля 152 калибровки, который сконфигурирован для связи со средствами управления компаса карманного электронного устройства 1.
На блоке 204 измерения ускорения карманного электронного устройства 1 получаются для трех измерений (X, Y, Z) в то время как карманным электронным устройством 1 осуществляют обнос по пути. В следующем примере описан случай, когда карманным электронным устройством 1 осуществляют обнос по пути туда и обратно. Однако в некоторых примерах карманным электронным устройством 1 осуществляют обнос по пути только в одном направлении. И в некоторых примерах карманным электронным устройством 1 осуществляют обнос по пути в первом направлении и затем снова в том же самом направлении.
На блоке 204 карманным электронным устройством 1 осуществляют обнос в первом направлении вдоль пути (из точки A в точку B) и затем во втором противоположном направлении назад вдоль пути (из точки B обратно в точку A). Второе направление (из точки B в точку A) симметрично противоположно первому направлению (из точки A в точку B). Согласно некоторым примерам, датчики 130 ускорения и гироскоп 140 могут быть сконфигурированы с возможностью получать измерения, и модуль 150 измерения может быть сконфигурирован с возможностью принимать измерения от датчиков. Карманное электронное устройство 1 может принимать ввод пользователя, указывающий начало и конец перемещения-обноса, выполняемого карманным электронным устройством 1, по пути, с использованием средства 128 ввода пользователя, описанного более подробно ниже.
Ссылка теперь будет сделана на фиг.3; описание фиг.2 продолжается ниже. Фиг.3 изображает перемещение-обнос, выполняемое карманным электронным устройством 1, в способе вычисления расстояния пути 302 на или над поверхностью 3-D-объекта 304. Объект 304 может быть, например, частью тела или предметом одежды. Карманное электронное устройство 1 может скользить по объекту 304 (при этом соприкасаясь с ним) или проноситься над поверхностью объекта 304 от исходной точки A до конечной точки B линии 302 пути.
Могут существовать различные конфигурации начальной позиции, в зависимости от позиции карманного электронного устройства 1 в начальной и конечной точках A, B. Начальная позиция может зависеть от того, какое из измерений (X, Y или Z) определено в качестве доминирующего измерения для измерения.
Ссылка теперь будет сделана на фиг.4. Фиг.4 изображает блок-схему, иллюстрирующую способ получения измерений (который может входить в состав блока 204, блока получения измерений). В опциональной процедуре 402 пользователь может в некоторых примерах осуществлять вход, например, путем обеспечения имени пользователя и пароля. В опциональной процедуре 404 пользователь может инструктироваться вручную ввести один или несколько элементов персональных данных, например рост или вес. Введенные персональные данные могут быть измерениями путей, которые пользователь уже знает, и, таким образом, эти пути не обязательно будет измерять. В некоторых примерах проверка валидности может выполняться (например, модулем 154 оценки качества) над персональными данными, введенными пользователем, либо до, либо после того, как окончательное расстояние вычисляется (например, модулем измерения 152). Среди трех векторов (X, Y, Z) один из трех векторов устанавливается в качестве предварительно определенного доминирующего вектора (например, X).
В процедуре 406 пользователь информируется (например, модулем 150 измерения) о доминирующем векторе (например, X) и инструктируется, как держать и располагать карманное электронное устройство 1, с использованием звуковых и/или визуальных инструкций на дисплее 116. Пользователь может инструктироваться о том, какую часть объекта 304 измерять, например, для руки пользователь может инструктироваться осуществлять измерение от плечевого сустава до кончика пальца, или для предмета одежды пользователь может инструктироваться осуществлять измерение вдоль линии талии.
В процедуре 408 пользователю обеспечивается подсказка (например, модулем 150 измерения) инициировать процесс измерения путем обеспечения ввода пользователя (например, путем нажатия кнопки) с использованием средства 128 ввода пользователя. Пользователь затем инструктируется ожидать предварительно определенный период времени (например, конкретное количество секунд) перед началом перемещения карманного электронного устройства 1 из точки A (т. е. перед измерением пути 302 из точки A в точку B). Пользователь также инструктируется указать прибытие карманного электронного устройства 1 в точку B (например, путем нажатия кнопки или снова той же самой кнопки) и затем ожидать и оставаться неподвижным в точке B в течение предварительно определенного периода времени. В процедуре 408 в конце периода времени ожидания указание (например, визуальное и/или звуковое, например звук гудка) обеспечивается пользователю, чтобы информировать пользователя начать измерение и перемещать карманное электронное устройство 1 из точки A в точку B.
Затем в процедуре 410 пользователь выполняет измерение пути 302 путем обноса карманным электронным устройством 1 в первом направлении (из точки A в точку B) и затем указывает прибытие карманного электронного устройства 1 в точку B путем обеспечения ввода пользователя (например, путем нажатия кнопки).
В течение перемещения из точки A в точку B по меньшей мере один датчик (например, акселерометр 130) используется, чтобы измерить ускорение для трех измерений X, Y, Z вдоль пути 302 из точки A в точку B вдоль объекта 304. По меньшей мере один датчик (например, гироскоп 140) может быть использован, чтобы измерять ориентацию карманного электронного устройства 1 для трех измерений X, Y, Z вдоль пути 302 из точки A в точку B вдоль объекта 304. Элементы выборки ускорения и ориентации берутся для каждого измерения (X, Y, Z) с некоторым установленным интервалом или частотой получения выборки в течение времени перемещения карманного электронного устройства 1 и принимаются (например, модулем 150 измерения).
Согласно некоторым примерам, в процедуре 412 пользователь затем инструктируется (например, модулем 150 измерения) ожидать предварительно определенный период времени (например, конкретное количество секунд) перед измерением обратного пути из точки B в точку A. Пользователь также инструктируется (например, модулем 150 измерения) указать прибытие карманного электронного устройства 1 в точку A путем обеспечения ввода пользователя (например, путем нажатия кнопки или снова той же самой кнопки) и затем ожидать и оставаться неподвижным в точке A в течение предварительно определенного периода времени. В процедуре 412 в конце периода времени ожидания указание (например, визуальное и/или звуковое, например звук гудка) обеспечивается (например, модулем 150 измерения) пользователю, чтобы информировать пользователя начать измерение и перемещать карманное электронное устройство 1 из точки B в точку A.
Затем в процедуре 414 пользователь выполняет измерение пути 302 путем обноса карманным электронным устройством 1 во втором, обратном направлении (из точки B в точку A) симметрично противоположном первому направлению (из точки A в точку B). Затем пользователь указывает прибытие карманного электронного устройства 1 в точку A путем обеспечения ввода пользователя (например, путем нажатия кнопки). По меньшей мере один датчик (например, акселерометр 130) используется, чтобы измерять ускорение для трех измерений X, Y, Z вдоль пути 302 из точки B в точку A вдоль объекта 304. По меньшей мере один датчик (например, гироскоп 140) может быть использован, чтобы измерять ориентацию карманного электронного устройства 1 для трех измерений X, Y, Z вдоль пути 302 из точки A в точку B вдоль объекта 304. Элементы выборки ускорения берутся для каждого измерения (X, Y, Z) с некоторым установленным интервалом или частотой получения выборки в течение времени перемещения карманного электронного устройства 1 и принимаются (например, модулем 150 измерения).
Затем в процедуре 416 пользователь инструктируется (например, модулем 150 измерения) ожидать предварительно определенный период времени (например, конкретное количество секунд), при этом оставаясь неподвижным в точке A. В процедуре 416 в конце периода времени ожидания указание (например, визуальное и/или звуковое, например звук гудка) обеспечивается (например, модулем 150 измерения) пользователю, чтобы информировать пользователя, что ему больше не требуется оставаться неподвижным в точке A, тем самым завершая процесс измерения и получая участки ускорения для трех измерений (Xуск, Yуск, Zуск) для первого направления (из точки A в точку B) и второго направления (из точки B в точку A) вдоль пути 302 на объекте 304 (например, в модуле 150 измерения).
В качестве дополнения к измерению значений X, Y, Z ускорения перемещения (Xуск, Yуск, Zуск), датчик(и) (например, магнитометр) может также обнаруживать перемещение ускорения X, Y, Z ввиду гравитации (Xg, Yg, Zg). В некоторых примерах датчик(и) может также обнаруживать отклонение, угол крена и высоту карманного электронного устройства 1. Новые значения X, Y, Z ускорения (Xуск, Yуск, Zуск) могут быть вычислены (например, модулем 156 вычисления) на основе перемещения ускорения X, Y, Z ввиду гравитации (Xg, Yg, Zg), чтобы обеспечить компенсированные значения ускорения.
Возвращаясь теперь к фиг.2, блок 204 может тем самым обеспечивать три участка ускорения (Xуск, Yуск, Zуск), причем каждый участок ускорения содержит последовательность точек взятия элементов выборки, помеченных временными метками, указывающих ускорение карманного электронного устройства между исходной точкой A и конечной точкой B для каждого из трех измерений (X, Y, Z).
На блоке 204 дополнительная калибровка может опционально выполняться над значениями X, Y, Z ускорения. В качестве дополнения к компенсации значений X, Y, Z ускорения для эффекта гравитации, значения X, Y, Z ускорения могут быть нормализованы. Далее термин "компенсированный" будет ссылаться на значения после того, как эффект гравитации был удален и нормализация была выполнена. Согласно некоторым примерам, модуль 152 калибровки может быть сконфигурирован с возможностью осуществлять эту калибровку.
Опционально, на блоке 206 проверка качества может выполняться. Для значений X, Y, Z ускорения (Xуск, Yуск, Zуск) значения X, Y, Z скорости вычисляются путем выполнения интегрирования над значениями X, Y, Z ускорения (Xуск, Yуск, Zуск). Максимальное значение скорости вычисляется с использованием максимальных значений для значений X, Y, Z скорости. Максимальное значение скорости используется в качестве указания меры качества. Если максимальное значение скорости меньше конкретного предварительно определенного порога, например меньше некоторого предварительно определенного значения, то перемещение пользователя карманного электронного устройства 1 в течение процесса измерения может быть определено как слишком медленное. Соответственно, в таком случае пользователю может быть обеспечена подсказка и инструкция выполнять процесс измерения снова от начала и с более высокой скоростью. Согласно некоторым примерам, модуль 154 оценки качества может выполнять эту проверку качества.
На блоке 208 точка по существу посередине между двумя этапами измерения (точка между измерением от точки A до точки B и от точки B до точки A) идентифицируется, и полное измерение для каждого измерения (X, Y, Z) разбивается на две части в этой средней точке. Согласно некоторым примерам, модуль 156 вычисления может быть сконфигурирован с возможностью идентифицировать среднюю точку и разбивать измерение на две части.
Ссылка теперь будет сделана на фиг.5; описание фиг.2 продолжается ниже. Фиг.5 изображает блок-схему, иллюстрирующую способ идентификации точки по существу посередине между двумя измерениями и разбиения полного измерения на две части в этой средней точке (что может входить в состав блока 208). На блоке 502, согласно некоторым примерам, новый вектор для доминирующего вектора (например, X) вычисляется (например, модулем 156 вычисления) с использованием весов, чтобы выделить конкретные значения для значений X ускорения (Xуск).
Возвращаясь теперь к блоку 502 с фиг.5, взвешивание значений X ускорения (Xуск) может быть осуществлено (например, модулем 156 вычисления) с использованием любого надлежащего взвешивания. Согласно одному примеру, взвешивание значений X ускорения (Xуск) может быть осуществлено путем умножения компенсированных значений X ускорения (Xуск) на абсолютное значение X скорости (ABS|Xск|), чтобы получить взвешенные значения X (Xуск*|ск|). В качестве альтернативы, другие веса могут быть использованы, такие как умножение значений X ускорения (Xуск) на варьирующиеся веса вдоль графа или графика значений X ускорения (Xуск) (например, низкие числа у начала и более высокие числа у средней точки).
На блоке 504 средний фильтр нижних частот используется (например, модулем 156 вычисления) над взвешенными значениями X (Xуск*|ск|) и над значениями X скорости (Xск).
Средний фильтр нижних частот может осуществляться, например, посредством скользящего окна предварительно определенного периода времени (например, предварительно определенного количества секунд). Средний фильтр нижних частот определяет среднее для векторов путем перемещения окна фильтра на один элемент выборки графа за раз. Фильтрованные результаты менее зашумлены.
На блоке 506 после фильтрации нормализация выполняется (например, модулем 156 вычисления) над обоими из фильтрованных векторов, взвешенными значениями X (Xуск*|ск|) и значениями X скорости (Xск).
Затем на блоке 508 скользящее окно среднеквадратического отклонения предварительно определенного периода времени используется (например, модулем 156 вычисления) над нормализованным, фильтрованным вектором взвешенных значений X (Xуск*|ск|), чтобы вычислить значения среднеквадратического отклонения (Xср_отк). Там, где изменения являются резкими во взвешенных значениях X (Xуск*|ск|), результатом являются очень высокие значения, т. е. там, где производная взвешенного значения X (Xуск*|ск|) высока.
На блоке 510 моменты времени максимального и минимального значений (tмакс и tмин) ненормализованных значений X скорости (Xск) определяются (например, модулем 156 вычисления).
На блоке 512 моменты времени максимального и минимального значений (tмакс и tмин) ненормализованных значений X скорости (Xск), определенные на блоке 510, применяются (например, модулем 156 вычисления) к среднеквадратическому отклонению взвешенных значений X (Xср_отк), полученному на блоке 508.
На блоке 514 точка по существу посередине времени максимального и минимального значений (tмакс и tмин) на графе среднеквадратического отклонения взвешенных значений X (Xср_отк) определяется в качестве средней точки (S0) (например, модулем 156 вычисления).
Затем на блоке 516 полное измерение значений X, Y, Z ускорения (Xуск, Yуск, Zуск) разбивается на две части в средней точке (S0) (например, модулем 156 вычисления).
Возвращаясь теперь к фиг.2, на блоке 210 начальная и конечная точки перемещения для каждой из двух частей, найденных из разбиения полного измерения на блоке 208, идентифицируются. Согласно некоторым примерам, модуль 156 вычисления может быть сконфигурирован с возможностью идентифицировать начальную и конечную точки перемещения. В конкретных примерах идентификация начальной и конечной точки перемещения (s1, e1 и s2, e2) для каждой из двух частей выполняется с использованием различных весов для каждой из двух частей. С этой целью различные типы весов могут быть использованы, включающие в себя, например: среднеквадратическое отклонение, угловой коэффициент и полное ускорение.
Ссылка теперь будет сделана на фиг.6; описание фиг.2 продолжается ниже. Фиг.6 изображает блок-схему, иллюстрирующую способ идентификации начальной и конечной точек перемещения для каждой из двух частей (что может входить в состав блока 210). На блоке 602A, согласно некоторым примерам, для первой части, от начала до средней точки (S0), определяются компенсированные абсолютные значения X скорости (Xск) в конкретном диапазоне.
На блоке 604A скользящее окно среднеквадратического отклонения предварительно определенного периода времени (например, предварительно определенного количества секунд) используется (например, модулем 156 вычисления) над значениями X скорости (Xск), чтобы вычислить среднеквадратическое отклонение (Сркв). Окно среднеквадратического отклонения вычисляет разницу между элементами выборки. Там, где изменения резки (т. е. там, где производная высока), результат будет относительно высоким значением. Вместо скользящего окна среднеквадратического отклонения другие способы, такие как угловой коэффициент, могут быть использованы. Среднеквадратическое отклонение (Сркв) умножается на значения X скорости (Xск), полученные на блоке 602A, чтобы вычислить взвешенный граф значений X (Xск*сркв). Веса используются, чтобы выделить низкие значения, которые близки к нулю, поскольку обычно большая часть измерения находится в этих зонах.
На блоке 606A среднее окно предварительно определенного периода времени (например, предварительно определенное количество секунд), меньшего либо равного предварительно определенному периоду времени до измерения, используется (например, модулем 156 вычисления) над взвешенными значениями, полученными на блоке 604A, чтобы определить уровень гладкости для первой части.
На блоке 608A конкретное процентное значение выше или ниже уровня гладкости определяется (например, модулем 156 вычисления) в качестве порога, например, определяемое как предварительно определенное процентное значение выше уровня гладкости.
На блоке 610A двоичное значение (0 или 1) назначается (например, модулем 156 вычисления) значениям X скорости (Xск) первой части на основе порога. Если заданное значение ниже порога, ему назначается значение 0, а если заданное значение выше порога, ему назначается значение 1. Результатом является вектор для первой части с одной или несколькими прямоугольными функциями.
На блоке 612A время начала и конца самой широкой прямоугольной функции определяется (например, модулем 156 вычисления) в качестве начальной и конечной точек перемещения первой части (s1, e1). В некоторых случаях будет более одной прямоугольной формы, в результате чего получается более одной пары потенциальных начальной и конечной точек. Более одной прямоугольной формы может быть ввиду шума и/или остановок в перемещении пользователем, когда пользователю не следует останавливаться. В этом случае все пары изучаются, и самая широкая пара определяется в качестве начальной и конечной точек перемещения первой части (s1 и e1). Дополнительно, проверки валидности могут выполняться (например, модулем 154 оценки качества) над каждой из пар, чтобы понять, должна ли эта пара вообще учитываться. Время начала и конца самой широкой пары (s1 и e1) будет применяться к компенсированным значениям X скорости (Xск) для первой части. Зона значений X скорости (Xск) между s1 и e1 является расстоянием в направлении доминирующего измерения X для первой части.
Различные веса могут быть использованы над второй частью разбитого измерения, чтобы идентифицировать начальную и конечную точки перемещения второй части (s2, e2). Использование тех же самых весов, использованных над первым сегментом, для второго сегмента может производить несостоятельные результаты.
На блоке 602B, согласно некоторым примерам, для второй части, от средней точки (S0) до конца, компенсированные абсолютные значения X скорости (Xск) в конкретном диапазоне определяются (например, модулем 156 вычисления).
На блоке 604B для второй части полное ускорение (Уск) вычисляется (например, модулем 156 вычисления) с использованием значений X, Y, Z ускорения (Xуск, Yуск, Zуск). Полное ускорение (Уск) умножается на значения X скорости (Xск), полученные на блоке 602B, чтобы вычислить взвешенный граф значений X (Xск*Уск). Этот взвешенный вектор значений X (Xск*Уск) для второй из разбитых частей отличен от взвешенного вектора значений X (Xск*сркв) для первой из разбитых частей, поскольку вес является полным ускорением (Уск), а не среднеквадратическим отклонением скорости (Сркв).
На блоке 606B среднее окно предварительно определенного периода времени (например, предварительно определенного количества секунд), меньшего или равного предварительно определенному периоду времени до измерения, используется (например, модулем 156 вычисления) над взвешенными значениями, полученными на блоке 604B, чтобы определить уровень гладкости для второй части.
На блоке 608B конкретное процентное значение выше или ниже уровня гладкости определяется (например, модулем 156 вычисления) в качестве порога, например, определяемое как предварительно определенное процентное значение выше уровня гладкости.
На блоке 610B двоичное значение (0 или 1) назначается (например, модулем 156 вычисления) значениям X скорости (Xск) второй части на основе порога. Если заданное значение ниже порога, ему назначается значение 0, а если заданное значение выше порога, ему назначается значение 1. Результатом является вектор для второй части с одной или несколькими прямоугольными функциями.
На блоке 612B время начала и конца самой широкой прямоугольной функции определяется (например, модулем 156 вычисления) в качестве начальной и конечной точек перемещения второй части (s2, e2). В некоторых случаях будет более одной прямоугольной формы, в результате чего получится более одной пары потенциальных начальной и конечной точек. Более одной прямоугольной формы может быть ввиду шума и/или остановок в перемещении пользователем, когда пользователю не следует останавливаться. В этом случае все пары изучаются, и самая широкая пара определяется в качестве начальной и конечной точек перемещения второй части (s2 и e2). Дополнительно, проверки валидности могут выполняться (например, модулем 154 оценки качества) над каждой из пар, чтобы понять, должна ли эта пара вообще учитываться. Время начала и конца самой широкой пары (s2 и e2) будут применяться к компенсированным значениям X скорости (Xск) для второй части. Зона значений X скорости (Xск) между s2 и e2 является расстоянием в направлении доминирующего измерения X для второй части.
Возвращаясь теперь к фиг.2, на блоке 212 зона между начальной и конечной точками перемещения для каждой из двух частей (s2, e1 и s2, e2), полученных на блоке 210, интегрируется, чтобы вычислить длину для каждой из двух частей. Согласно некоторым примерам, модуль 156 вычисления может интегрировать эти зоны и вычислять эти длины.
Начальная и конечная точки перемещения для каждой из двух частей, разделенных на блоке 210 для доминирующего измерения (X), применяются (например, модулем 156 вычисления) к другим измерениям (Y и Z). Для первой части нормализованные значения X, Y, Z скорости (Xск, Yск, Zск) интегрируются (например, модулем 156 вычисления) между начальной и конечной точкой перемещения первой части (между s1 и e1), чтобы вычислить длину для каждого измерения (dx1, dy1, dz1) для первой части. В некоторых примерах вычисленные длины для каждого измерения могут быть использованы (например, модулем 156 вычисления), чтобы вычислить длину для первой части (расстAB). Для второй части нормализованные значения X, Y, Z скорости (Xск, Yск, Zск) интегрируются (например, модулем 156 вычисления) между начальной и конечной точкой перемещения второй части (между s2 и e2), чтобы вычислить длину для каждого измерения (dx2, dy2, dz2) для второй части. В некоторых примерах вычисленные длины для каждого измерения могут быть использованы (например, модулем 156 вычисления), чтобы вычислить длину для второй части (расстBA).
На блоке 214 окончательная длина на основе двух длин (расстAB, расстBA), полученных на блоке 212, вычисляется. В предыдущей процедуре два скалярных числа, расстояние между A-B и расстояние между B-A (расстAB, расстBA), были определены. В некоторых примерах процедура вычисления окончательной длины на основе двух длин выполняется (например, модулем 156 вычисления) путем получения среднего для двух определенных длин.
Среднее может быть определено в качестве окончательного измерения длины пути 302 на 3-D-объекте 304. В некоторых примерах иным образом взвешенное среднее может быть использовано (например, модулем 156 вычисления), чтобы вычислить окончательное измерение длины пути 302 на/над 3-D-объектом 304. Согласно некоторым примерам, модуль 156 вычисления может быть сконфигурирован с возможностью выполнять это вычисление, дисплей 116 может быть сконфигурирован с возможностью отображать результаты пользователю, память 114 может быть сконфигурирована с возможностью сохранять результаты, и подсистема 104 связи может быть сконфигурирована с возможностью передавать результаты другому компьютерному обрабатывающему устройству, такому как сервер.
На опциональном блоке 216 два расстояния (расстAB, расстBA) используются для указания измерения качества. Например, разница между двумя расстояниями (расстAB, расстBA) используется для указания измерения качества. Предварительно определенный порог может быть установлен, и если разница между двумя расстояниями, вычисленными для каждой части (расстAB, расстBA), слишком высока и превосходит порог, то может быть определено, что выполненное измерение было несостоятельным, и пользователю необходимо снова выполнить измерение. Согласно некоторым примерам, модуль 154 оценки качества может быть сконфигурирован с возможностью выполнять эту оценку качества.
Хотя здесь были проиллюстрированы и описаны конкретные признаки изобретения, множество модификаций, замещений, изменений и эквивалентов теперь придет в голову обычным специалистам в данной области техники. Таким образом, следует понимать, что прилагаемая формула изобретения предназначена для покрытия всех таких модификаций и изменений как находящихся в пределах истинной сущности изобретения.
Следует понимать, что варианты осуществления, описанные выше, излагаются в качестве примера, и различные их признаки и комбинации этих признаков могут варьироваться и модифицироваться.
Хотя были показаны и описаны различные варианты осуществления, следует понимать, что нет никакого намерения ограничить изобретение таким раскрытием, а скорее предполагается покрыть все модификации и альтернативные конструкции, попадающие в объем изобретения, определенный в прилагаемой формуле изобретения.
Также будет понятно, что система согласно в настоящий момент раскрываемому изобретению может осуществляться, по меньшей мере частично, в виде надлежащим образом запрограммированного компьютера. Схожим образом, в настоящий момент раскрываемое изобретение предполагает компьютерную программу, читаемую компьютером, для исполнения раскрываемого способа. В настоящий момент раскрываемое изобретение дополнительно предполагает машиночитаемую память (включающую в себя долговременную память), материально осуществляющую программу инструкций, исполняемых машиной для исполнения раскрываемого способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ВЫПОЛНЕНИЯ ИЗМЕРЕНИЯ ДЛИНЫ ПУТИ С ИСПОЛЬЗОВАНИЕМ КАРМАННОГО ЭЛЕКТРОННОГО УСТРОЙСТВА | 2016 |
|
RU2719310C2 |
| СПОСОБ, УСТРОЙСТВО И ТЕРМИНАЛ ДЛЯ ПЕРЕНАСТРОЙКИ ИЗОБРАЖЕНИЯ | 2014 |
|
RU2614541C2 |
| ЭЛЕКТРОННОЕ МОБИЛЬНОЕ УСТРОЙСТВО | 2016 |
|
RU2711468C2 |
| УСТРОЙСТВО ДЛЯ ИГР | 2011 |
|
RU2475290C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ПОЛУЧЕНИЯ И ПРЕДСТАВЛЕНИЯ ДАННЫХ О ТУРБУЛЕНТНОСТИ ПОСРЕДСТВОМ УСТРОЙСТВ СВЯЗИ, РАСПОЛОЖЕННЫХ НА САМОЛЕТАХ | 2016 |
|
RU2651430C1 |
| СПОСОБ И СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО ПРЕДОХРАНЕНИЯ ОТ СТОЛКНОВЕНИЙ И СОХРАНЕНИЯ КОМПОЗИЦИИ КАМЕРЫ | 2018 |
|
RU2745828C1 |
| ИДЕНТИФИКАЦИЯ ПЛОСКОСТЕЙ РАЗРЫВА ИЗ МИКРОСЕЙСМИЧЕСКИХ ДАННЫХ | 2013 |
|
RU2594369C1 |
| ФОТОКАМЕРА ДЛЯ ЭЛЕКТРОННОГО УСТРОЙСТВА | 2006 |
|
RU2417545C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПРОТЯЖЕННЫХ КОНТУРОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2016 |
|
RU2628172C1 |
| ОБРАБОТКА ИНФОРМАЦИИ ДАТЧИКА | 2014 |
|
RU2622880C2 |

Настоящее изобретение относится в целом к карманным электронным устройствам и, в частности, к использованию таких устройств для измерения длины пути. Изобретение обеспечивает способ измерения пути на трехмерном объекте с использованием карманного электронного устройства, содержащего датчик ускорения. Способ содержит использование процессора для исполнения этапов, на которых получают измерения ускорения карманного электронного устройства, в то время как карманным электронным устройством осуществляют обнос по пути в первом направлении, тем самым получая участки ускорения для трех измерений для первого направления, идентифицируют начальную и конечную точки перемещения и осуществляют интегрирование между начальной и конечной точками перемещения, чтобы найти длину. Затем получают измерения ускорения во втором направлении, тем самым получая участки ускорения для трех измерений для второго направления, идентифицируют среднюю точку по существу в середине между двумя замерами и разбивают измерения ускорения на две части в этой средней точке, при этом идентификация средней точки содержит взвешивание значений ускорения, соответствующих доминирующему вектору, тем самым получая новый вектор, содержащий взвешенные значения. 4 н. и 29 з.п. ф-лы, 8 ил.
1. Способ измерения пути на трехмерном объекте с использованием карманного электронного устройства, содержащего датчик ускорения, причем способ содержит использование процессора для исполнения этапов, на которых:
получают измерения ускорения карманного электронного устройства, в то время как карманным электронным устройством осуществляют обнос по пути в первом направлении, тем самым получая участки ускорения для трех измерений для первого направления;
идентифицируют начальную и конечную точки перемещения;
осуществляют интегрирование между начальной и конечной точками перемещения, чтобы найти длину;
получают измерения ускорения во втором направлении, тем самым получая участки ускорения для трех измерений для второго направления;
идентифицируют среднюю точку по существу в середине между двумя замерами; и
разбивают измерения ускорения на две части в этой средней точке,
при этом идентификация средней точки содержит:
a) взвешивание значений ускорения, соответствующих доминирующему вектору, тем самым получая новый вектор, содержащий взвешенные значения.
2. Способ по п.1, в котором упомянутое второе направление симметрично противоположно упомянутому первому направлению.
3. Способ по п.1, в котором упомянутое второе направление по существу то же самое, что и упомянутое первое направление.
4. Способ по п.1, содержащий этап, на котором идентифицируют начальную и конечную точки перемещения для упомянутой второй части.
5. Способ по п.4, содержащий этап, на котором осуществляют интегрирование между начальной и конечной точками перемещения для упомянутой второй части, чтобы найти длину.
6. Способ по п.5, содержащий этап, на котором вычисляют окончательную длину на основе длины упомянутой первой части и длины упомянутой второй части.
7. Способ по п.1, в котором упомянутая идентификация начальной и конечной точек перемещения выполняется с использованием по меньшей мере одного типа весового типа.
8. Способ по п.4, в котором упомянутая идентификация начальной и конечной точек перемещения для упомянутого второго измерения выполняется с использованием по меньшей мере одного типа весового типа.
9. Способ по п.8, в котором упомянутый весовой тип, используемый для упомянутой второй части, отличен от весового типа, используемого для упомянутой первой части.
10. Способ по п.8, в котором упомянутый весовой тип, используемый для упомянутой второй части, является по существу тем же самым весовым типом, используемым для упомянутой первой части.
11. Способ по п.1, в котором весовой тип включает в себя любое одно из среднеквадратического отклонения, углового коэффициента и полного ускорения.
12. Способ по п.6, в котором упомянутое вычисление окончательной длины на основе двух длин выполняется путем усреднения.
13. Способ по п.5, содержащий этап, на котором используют длину упомянутой первой части и длину упомянутой второй части для указания измерения качества.
14. Способ по п.1, содержащий этап, на котором измеряют ориентацию при помощи датчика ориентации.
15. Способ по п.5, содержащий этап, на котором калибруют измерения ускорения, чтобы компенсировать потенциальную неточность ориентации.
16. Способ по п.1, содержащий этап, на котором измеряют ускорение при помощи датчика ускорения.
17. Способ по п.1, содержащий этап, на котором калибруют карманное электронное устройство на истинный север или магнитный север.
18. Способ по п.1, содержащий этап, на котором принимают ввод пользователя, указывающий начало и конец перемещения-обноса, выполняемого карманным электронным устройством, по пути.
19. Способ по п.1, в котором упомянутое карманное электронное устройство является смартфоном.
20. Способ по п.1, содержащий этап, на котором используют данные углов и данные ориентации, чтобы компенсировать измерения ускорения в отношении эффекта гравитации.
21. Способ по п.1, содержащий этап, на котором преобразуют упомянутые данные измерения в двоичные данные, чтобы идентифицировать начальную и конечную точки перемещения.
22. Способ по п. 1, в котором взвешивание содержит по меньшей мере одно из следующего: умножение значений ускорения на абсолютные значения скорости, соответствующие доминирующему вектору; умножение значений ускорения на изменяющиеся веса вдоль графика значений ускорения.
23. Способ по п. 1, в котором идентификация средней точки дополнительно содержит:
b) применение усредняющего фильтра нижних частот к взвешенным значениям и значениям скорости, соответствующим доминирующему вектору.
24. Способ по п. 23, в котором применение фильтра усреднения нижних частот основано на скользящем окне определенного периода времени.
25. Способ по п. 1, в котором идентификация средней точки дополнительно содержит:
c) выполнение нормализации над взвешенными значениями и над значениями скорости, соответствующими доминирующему вектору, тем самым генерируя по меньшей мере нормализованные взвешенные значения и нормализованные значения скорости.
26. Способ по п. 1, в котором идентификация средней точки дополнительно содержит:
d) вычисление значений среднеквадратического отклонения.
27. Способ по п. 26, в котором вычисление значений среднеквадратического отклонения содержит применение скользящего окна среднеквадратического отклонения определенного периода времени к отфильтрованным взвешенным значениям.
28. Способ по п. 26, в котором идентификация средней точки дополнительно содержит:
e) определение моментов времени максимальных значений и моментов времени минимальных значений ненормализованных значений скорости, соответствующих доминирующему вектору.
29. Способ по п. 28, в котором идентификация средней точки дополнительно содержит:
f) применение моментов времени максимальных значений и моментов времени минимальных значений к значениям среднеквадратического отклонения.
30. Способ по п. 29, в котором идентификация средней точки дополнительно содержит:
g) определение, в качестве средней точки, точки на графике значений среднеквадратического отклонения, причем эта точка находится по существу в середине моментов времени максимальных значений и моментов времени минимальных значений.
31. Долговременный машиночитаемый носитель, хранящий машиночитаемые инструкции, которые, при исполнении карманным электронным устройством, перемещаемым по пути на трехмерном объекте, который должен быть измерен, побуждают карманное электронное устройство измерять длину пути посредством операций, на которых
получают измерения ускорения карманного электронного устройства, в то время как карманным электронным устройством осуществляют обнос по пути в первом направлении, тем самым получая участки ускорения для трех измерений для первого направления;
идентифицируют начальную и конечную точки перемещения;
осуществляют интегрирование между начальной и конечной точками перемещения, чтобы найти длину;
получают измерения ускорения во втором направлении, тем самым получая участки ускорения для трех измерений для второго направления;
идентифицируют среднюю точку по существу в середине между двумя замерами; и
разбивают измерения ускорения на две части в этой средней точке,
при этом идентификация средней точки содержит:
a) взвешивание значений ускорения, соответствующих доминирующему вектору, тем самым получая новый вектор, содержащий взвешенные значения.
32. Карманное электронное устройство, сконфигурированное с возможностью измерять путь на трехмерном объекте, причем карманное электронное устройство содержит:
датчик ускорения, сконфигурированный с возможностью обнаруживать ускорение карманного электронного устройства;
компьютерную память; и
процессор, функционально связанный с памятью и с датчиком ускорения, причем память включает в себя инструкции для побуждения процессора:
получать измерения ускорения карманного электронного устройства, в то время как карманным электронным устройством осуществляют обнос по пути в первом направлении, тем самым получая участки ускорения для трех измерений для первого направления;
идентифицировать начальную и конечную точку перемещения;
осуществлять интегрирование между начальной и конечной точками перемещения, чтобы найти длину;
получать измерения ускорения во втором направлении, тем самым получая участки ускорения для трех измерений для второго направления;
идентифицировать среднюю точку по существу в середине между двумя замерами; и
разбивать измерения ускорения на две части в этой средней точке,
при этом идентификация средней точки содержит:
a) взвешивание значений ускорения, соответствующих доминирующему вектору, тем самым получая новый вектор, содержащий взвешенные значения.
33. Модуль измерения для карманного электронного устройства, причем модуль измерения сконфигурирован с возможностью измерять путь на трехмерном объекте и содержит:
пользовательский интерфейс, сконфигурированный с возможностью принимать ввод пользователя, указывающий начало и конец перемещения-обноса, выполняемого карманным электронным устройством, по пути;
блок приемника данных, сконфигурированный с возможностью получать от датчика ускорения участки ускорения карманного устройства, причем участки ускорения указывают ускорение карманного электронного устройства, в то время как карманным электронным устройством осуществляют обнос по пути в первом направлении, тем самым получая участки ускорения для трех измерений для первого направления;
блок обработки данных, сконфигурированный с возможностью
идентифицировать начальную и конечную точки перемещения для каждой из двух частей;
осуществлять интегрирование между начальной и конечной точками перемещения, чтобы найти длину; и
получать измерения ускорения во втором направлении, тем самым получая участки ускорения для трех измерений для второго направления;
идентифицировать среднюю точку по существу в середине между двумя замерами; и
разбивать измерения ускорения на две части в этой средней точке,
при этом идентификация средней точки содержит:
a) взвешивание значений ускорения, соответствующих доминирующему вектору, тем самым получая новый вектор, содержащий взвешенные значения; и
блок вывода, сконфигурированный с возможностью выводить окончательную длину для пользователя.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| DE 4222373 А1, 13.01.1994. | |||

