ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее раскрытие относится в общем случае к карманным электронным устройствам. Более конкретно, настоящее раскрытие относится к способу выполнения измерения длины пути с использованием одного или большего количества датчиков, интегрированных в карманное электронное устройство, и к карманному электронному устройству, адаптированному для реализации указанного способа.
УРОВЕНЬ ТЕХНИКИ
В контексте Интернет-коммерции определение размеров является давно существующей проблемой и для Интернет-покупателей, и для розничных Интернет-магазинов. Покупки через Интернет предоставляют возможность пользователю просматривать и приобретать товар в реальном времени через Интернет и, в некоторых примерах, через веб-браузер по телефону, персональному компьютеру, телевизору и/или другому подключенному к Интернет устройству, не примеряя товар или не определяя, как хорошо он будет подходить.
Электронная коммерция, мобильная коммерция и другие формы покупок через Интернет и Интернет-коммерции также предоставляют возможность розничным торговцам, дистрибьюторам или другому элементу системы поставок товара расширять свой рынок, продавая товары на рынках, где информация о размере, возможно, не обязательно должна передаваться, учитывая различные результаты измерений или различные средние размеры тела.
Потребители, возможно, не обязательно должны взаимодействовать с розничным Интернет-торговцем. В некоторых примерах потребитель может искать товар через поисковую систему, поисковую систему по товарам и услугам и/или через агрегаторов.
ОБЩЕЕ ОПИСАНИЕ
Мобильные устройства, такие как смартфоны, планшеты, аудиоплееры и т.д., все больше и больше интегрируют акселерометры для обнаружения движения. Такие датчики в общем случае используются для таких приложений, как игры, вращение экрана и управление электропитанием.
Настоящее раскрытие относится к способу выполнения измерения длины пути с помощью карманного электронного устройства, содержащего датчик ускорения. Раскрытый в настоящее время способ может использоваться в контексте Интернет-коммерции, так как он предоставляет возможность Интернет-покупателю измерять часть тела и/или доступную одежду, с помощью, например, своего смартфона.
В настоящей заявке следующие термины и их производные могут истолковываться в свете приведенных ниже объяснений:
Термин «график» может использоваться для обращения к последовательности значений, связанных с указанием времени. График может представляться в двух измерениях в качестве диаграммы.
Термин «интервал» может относиться к набору смежных элементов последовательности упорядоченных элементов. Например, график ускорения может состоять из набора точек дискретизации, связанных с метками времени, и интервал может относиться к набору меток времени, соответствующих смежным точкам дискретизации графика ускорения.
Термин «путь» может относиться к линейному пути, т.е. к пути, вытянутому по существу вдоль одной линии пути. Путь может быть (немного) изогнут, и ошибки, вызванные небольшой кривой линии пути, могут, например, корректироваться с помощью обнаружения компонентов ускорения, перпендикулярных линии пути. Путь/линия пути может обеспечиваться с помощью опорной поверхности объекта. Например, путь может обеспечиваться частью тела или плоской поверхностью. В некоторых вариантах осуществления трение между карманным электронным устройством и опорной поверхностью может также вызывать ошибки, которые могут корректироваться. Внутренняя ошибка может также вызываться мобильными аппаратными средствами.
Термин «перемещение» может пониматься, как относящийся к линейному движению карманного электронного устройства от начальной точки до конечной точки, карманное электронное устройство движется по существу в одном направлении, параллельном линии пути. В некоторых вариантах осуществления карманное электронное устройство может скользить по линии пути от начальной точки до конечной точки. В некоторых вариантах осуществления карманное электронное устройство может совершать колебательные движения вдоль линии пути. В некоторых вариантах осуществления опорная поверхность может вытягиваться перпендикулярно силе тяжести.
Ввиду природы движения перемещения подразумевается, что интересующее обнаруженное ускорение может по существу быть линейным ускорением, которое проецируется на линию пути. Другими словами, интересующее ускорение может быть проекцией вектора ускорения на линию пути. Кроме того, движение перемещения может быть таково, что карманное электронное устройство останавливается в начальной точке и в конечной точке. В некоторых вариантах осуществления начальная точка и конечная точка могут обнаруживаться, например, через ввод данных пользователем через команду нажатия кнопки, голосовую команду и т.д.
Поэтому настоящее раскрытие обеспечивает способ выполнения измерения длины пути с помощью карманного электронного устройства, содержащего датчик ускорения. Способ содержит этапы, на которых: обнаруживают ускорение карманного электронного устройства, когда карманное электронное устройство перемещается по пути, таким образом получая график ускорения карманного устройства; вычисляют набор графиков скорости с помощью интегрирования графика ускорения по набору интервалов интегрирования, причем интервалы интегрирования имеют уменьшающуюся протяженность, и исключается возрастающая начальная часть графика ускорения; вычисляют набор расстояний с помощью интегрирования набора графиков скорости; и оценивают длину пути на основе набора вычисленных расстояний.
В некоторых вариантах осуществления конечная точка каждого интервала интегрирования соответствует последнему обнаруженному ускорению.
В некоторых вариантах осуществления начальная точка интервала интегрирования с самой большой протяженностью определяется с помощью анализа графика ускорения.
В некоторых вариантах осуществления анализ графика ускорения содержит обнаружение существенного изменения ускорения.
В некоторых вариантах осуществления анализ графика ускорения содержит обнаружение шума датчика ускорения.
В некоторых вариантах осуществления начальная точка каждого последующего интервала интегрирования, расположенного после интервала интегрирования с самой большой протяженностью, соответствует ускорению, обнаруженному после начальной точки интервала интегрирования с самой большой протяженностью.
В некоторых вариантах осуществления начальная точка интервала интегрирования с самой большой протяженностью соответствует первому обнаруженному значению.
В некоторых вариантах осуществления начальная точка каждого последующего интервала интегрирования, расположенного после интервала с самой большой протяженностью, определяется рекурсивно и соответствует ускорению, обнаруженному после начальной точки предыдущего интервала интегрирования.
В некоторых вариантах осуществления начальная точка каждого последующего интервала интегрирования, расположенного после интервала с самой большой протяженностью, определяется рекурсивно и соответствует ускорению, обнаруженному сразу после начальной точки предыдущего интервала интегрирования.
В некоторых вариантах осуществления оценка длины пути основана на статистическом анализе набора вычисленных расстояний.
В некоторых вариантах осуществления оценка длины пути вовлекает методы кластеризации. В частности, оценка длины пути может вовлекать одномерную кластеризацию.
В некоторых вариантах осуществления оценка длины содержит исключение несоответствующих расстояний из статистического анализа.
В некоторых вариантах осуществления оценка длины содержит этапы, на которых: округляют каждое вычисленное расстояние до ближайшего целого числа для получения набора округленных расстояний, связанных с набором вычисленных расстояний; определяют самое часто встречающееся округленное расстояние среди округленных расстояний; определяют набор соответствующих расстояний, состоящих из вычисленных расстояний, связанных с округленными расстояниями, удаленными меньше, чем на предопределенное целое число от самого часто встречающегося округленного расстояния; и выполняют статистический анализ по отношению к набору соответствующих расстояний.
В некоторых вариантах осуществления статистический анализ содержит определение среднего значения.
В некоторых вариантах осуществления способ содержит коррекцию по меньшей мере некоторых графиков скорости и вычисление набора расстояний с помощью по меньшей мере некоторых откорректированных графиков скорости.
В некоторых вариантах осуществления коррекция по меньшей мере некоторых графиков скорости выполняется с помощью вычитания полиномиальной функции первой степени из указанных по меньшей мере некоторых графиков скорости так, чтобы результирующие откорректированные начальная и конечная секции по меньшей мере некоторых откорректированных графиков скорости были по существу равны нулю. Термин «по существу равен нулю» может пониматься как «близко к нулевому значению», например, таким образом, что расстояния между нулем и значениями начальной и конечной секций могут быть ниже предопределенного порогового значения.
В другом аспекте настоящее раскрытие обеспечивает одно или большее количество не являющихся временными считываемых компьютером носителей, хранящих считываемые компьютером команды, которые, когда выполняются с помощью карманного электронного устройства, перемещающегося по пути, который будет измеряться, побуждают карманное электронное устройство измерять длину пути: обнаруживать ускорение карманного электронного устройства, когда карманное электронное устройство перемещается по пути, таким образом получая график ускорения карманного устройства; вычислять набор графиков скорости с помощью интегрирования графика ускорения по набору интервалов интегрирования, причем интервалы интегрирования имеют уменьшающуюся протяженность, и исключается возрастающая начальная часть графика ускорения; вычислять набор расстояний с помощью интегрирования набора графиков скорости; и оценивать длину пути на основе набора вычисленных расстояний.
В другом аспекте настоящее раскрытие обеспечивает карманное электронное устройство, адаптированное для выполнения измерения длины пути, данное карманное электронное устройство содержит: датчик ускорения, конфигурируемый для обнаружения ускорения карманного электронного устройства; запоминающее устройство; и процессор, соединенный с возможностью осуществления связи с запоминающим устройством и датчиком ускорения, причем запоминающее устройство включает в себя команды для побуждения процессор выполнять этапы, на которых: обнаруживают ускорение карманного электронного устройства, когда карманное электронное устройство перемещается по пути, таким образом получая график ускорения карманного устройства; вычисляют набор графиков скорости с помощью интегрирования графика ускорения по набору интервалов интегрирования, причем интервалы интегрирования имеют уменьшающуюся протяженность, и исключается возрастающая начальная часть графика ускорения; вычисляют набор расстояний с помощью интегрирования набора графиков скорости; и оценивают длину пути на основе набора вычисленных расстояний.
В другом аспекте настоящее раскрытие обеспечивает компьютерный программный продукт, адаптированный для выполнения ранее описанного способа.
В другом аспекте настоящее раскрытие обеспечивает модуль выполнения измерения для карманного электронного устройства, данный модуль выполнения измерения предоставляет возможность выполнения измерения длины пути и содержит: пользовательский интерфейс, конфигурируемый для приема вводимых пользователем данных, указывающих начало и окончание движения перемещения карманного электронного устройства по пути; блок приемника данных, конфигурируемый для получения из датчика ускорения графика ускорения карманного устройства, график ускорения указывает ускорение карманного электронного устройства, когда карманное электронное устройство перемещается по пути; блок обработки данных, конфигурируемый для: вычисления набора графиков скорости с помощью интегрирования графика ускорения по набору интервалов интегрирования, причем интервалы интегрирования имеют уменьшающуюся протяженность, и исключается возрастающая начальная часть графика ускорения; вычисления набора расстояний с помощью интегрирования набора графиков скорости; и оценки длины пути на основе набора вычисленных расстояний; и устройство вывода, конфигурируемое для вывода оцененной длины пути к пользователю.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания объекта изобретения, которое раскрыто в данной работе, и иллюстрации, как оно может выполняться на практике, далее будут описаны варианты осуществления, только посредством неограничивающего примера, со ссылкой на сопроводительные чертежи, на которых:
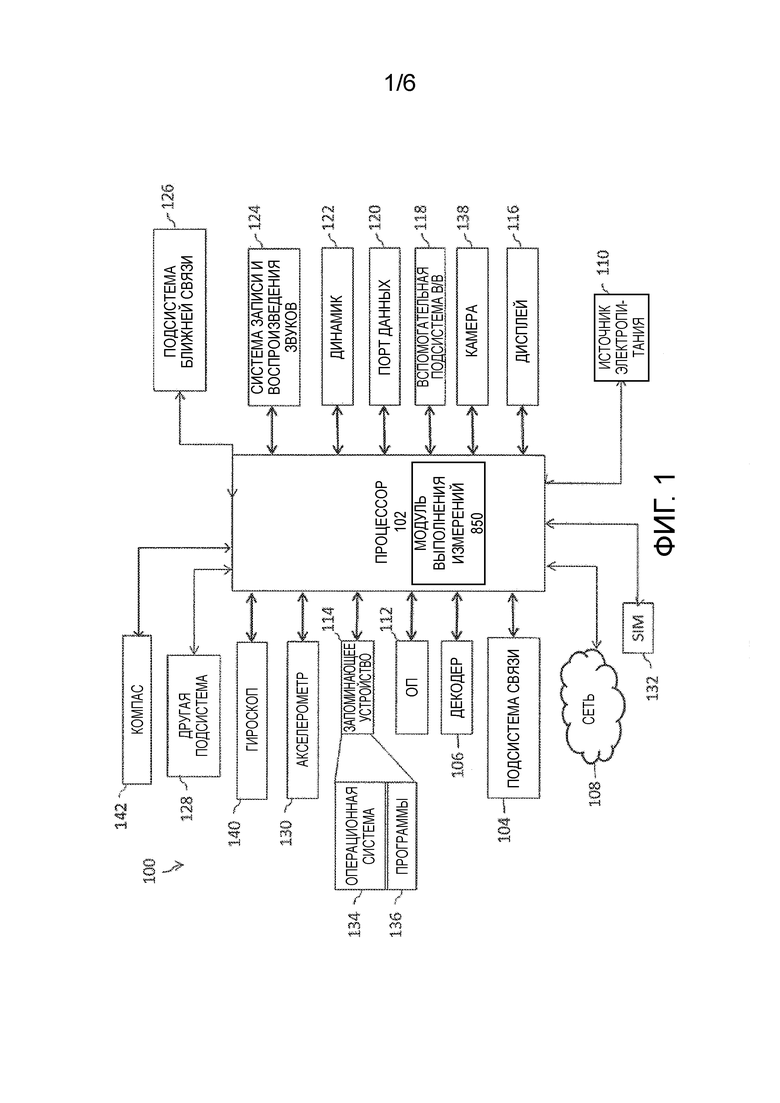
Фиг. 1 является функциональной схемой, показывающей карманное электронное устройство согласно вариантам осуществления настоящего раскрытия.
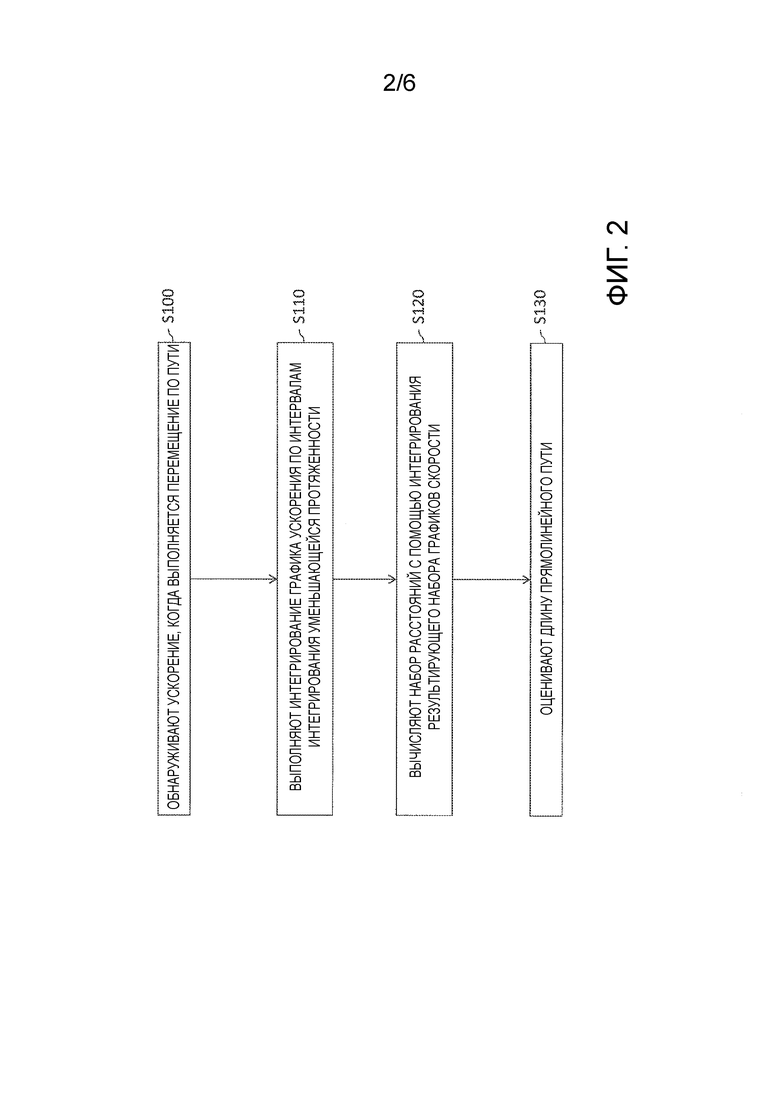
Фиг. 2 является последовательностью операций, показывающей этапы способа оценки длины пути согласно вариантам осуществления настоящего раскрытия.
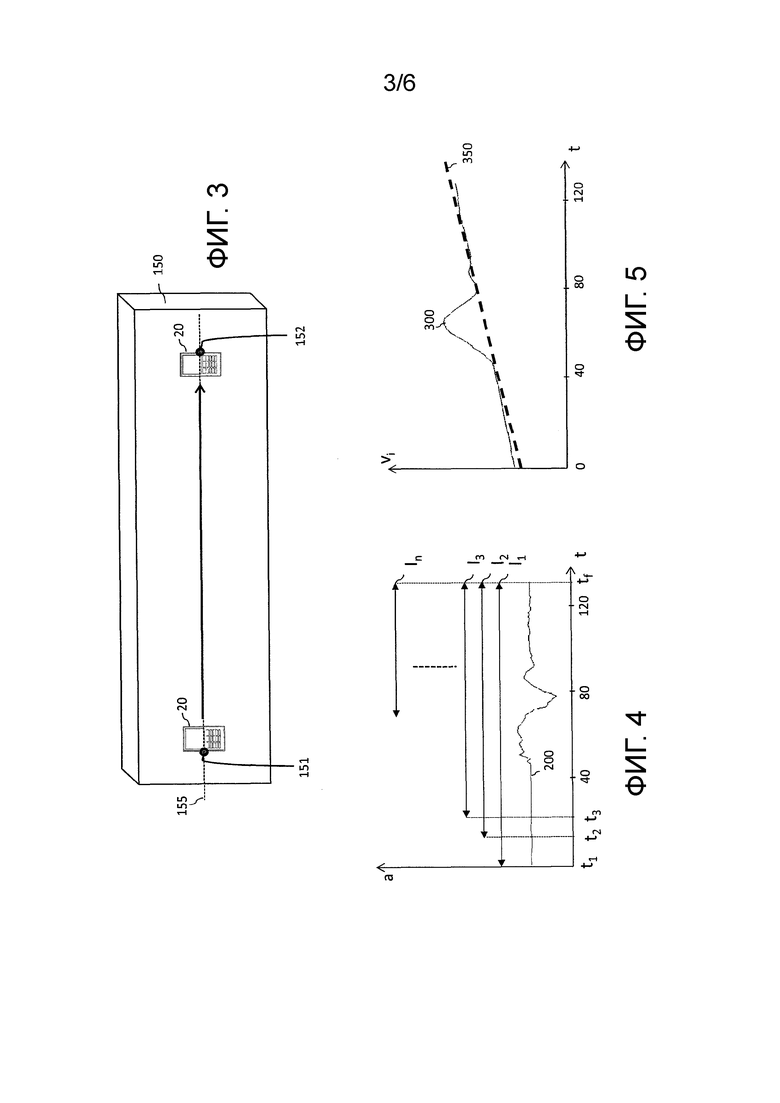
Фиг. 3 показывает движение перемещения карманного электронного устройства в способе оценки длины пути согласно вариантам осуществления настоящего раскрытия.
Фиг. 4 является примерным графиком ускорения и показывает набор интервалов интегрирования согласно вариантам осуществления настоящего раскрытия.
Фиг. 5 является примерным графиком скорости и показывает коррекцию первой степени согласно вариантам осуществления настоящего раскрытия.
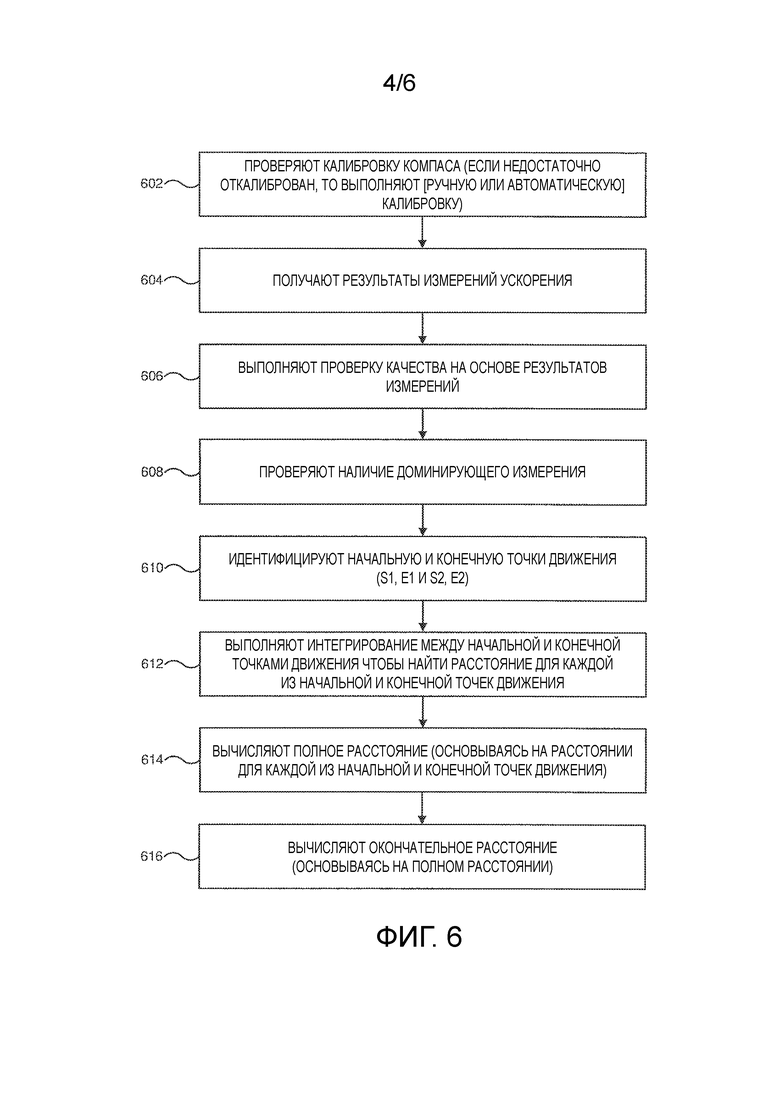
Фиг. 6 является последовательностью операций, показывающей способ вычисления длины пути согласно вариантам осуществления настоящего раскрытия.
Фиг. 7 является последовательностью операций, показывающей способ идентификации начальной и конечной точек движения согласно вариантам осуществления настоящего раскрытия.
Фиг. 8 является функциональной схемой, показывающей модуль выполнения измерения карманного электронного устройства на фиг. 1 согласно вариантам осуществления настоящего раскрытия.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В данной работе описаны некоторые примеры систем и способов, использующихся для выполнения измерения длины пути.
В последующем подробном описании многочисленные конкретные подробности сформулированы для обеспечения полного понимания объекта изобретения. Однако, специалистам будет понятно, что некоторые примеры объекта изобретения могут применяться без этих конкретных подробностей. В других случаях известные способы, процедуры и компоненты не описаны подробно, чтобы не затенять описание.
В данной работе фраза «например», «такой как», «к примеру» и их варианты описывают неограничивающие примеры объекта изобретения.
Ссылка в описании к «одному примеру», «некоторым примерам», «другому примеру», «другим примерам», «одному экземпляру», «некоторым экземплярам», «другому экземпляру», «другим экземплярам», «одному случаю», «некоторым случаям», «другому случаю», «другим случаям» или их вариантам подразумевает, что конкретная описанная особенность, структура или характеристика включает в себя по меньшей мере один пример объекта изобретения, но вид того же термина не обязательно относится к тому же примеру.
Нужно признать, что некоторые особенности, структуры и/или характеристики, раскрытые в данной работе, которые для ясности описаны в контексте отдельных примеров, могут также обеспечиваться в комбинации в одном примере. С другой стороны различные особенности, структуры и/или характеристики, раскрытые данной работе, которые для краткости описаны в контексте одного примера, могут также обеспечиваться отдельно или в любой подходящей подкомбинации.
Если, в частности, не указано иначе, как видно из последующих обсуждений, следует признать, что при обсуждениях описания используемые термины, такие как «генерация», «определение», «обеспечение», «прием», «использование», «передача», «выполнение», «анализ», «вычисление», «оценка» и т.п., могут относиться к действию (ям) и/или процессу (ам) любой комбинации программного обеспечения, аппаратных средств и/или аппаратно-программных средств. Например, эти термины могут относиться в некоторых случаях к действию (ям) и/или процессу (ам) имеющей возможность программирования машины, которая обрабатывает и/или преобразовывает данные, представленные как физические величины, такие как электронные величины, в регистрах и/или запоминающих устройствах имеющей возможность программирования машины, в другие данные, так же представленные в качестве физических величин в запоминающих устройствах, регистрах и/или другом аналогичном элементе (ах) хранения, передачи и/или отображения информации имеющей возможность программирования машины.
Фиг. 1 изображает высокоуровневую функциональную схему электронного блока 100 для работы карманного электронного устройства согласно настоящему раскрытию. Электронный блок 100 может включать в себя множество компонентов, таких как процессор 102, который может управлять всей работой карманного электронного устройства. В некоторых вариантах осуществления функции связи, обеспеченные с помощью карманного электронного устройства, могут включать в себя голосовую связь, передачу данных и команд, которые могут реализовываться с помощью подсистемы 104 связи. Подсистема 104 связи может использоваться для инициации и поддержания активного голосового вызова или сеанса передачи данных. Подсистема 104 связи может включать в себя различные комбинации аппаратных средств, программного обеспечения и аппаратно-программных средств для выполнения различных определяемых функций. Программное обеспечение может функционально или концептуально делиться на программные модули. Программное обеспечение в одном модуле может совместно использовать или вызывать функции в других модулях.
Данные, принятые карманным электронным устройством, могут обрабатываться, что включает в себя разуплотнение и дешифрацию, с помощью декодера 106. Подсистема 104 связи может принимать сообщения и отправлять сообщения в беспроводную сеть 108. Подсистема 104 связи может помогать инициировать и управлять активным вызовом, причем карманное электронное устройство находится в сеансе голосовой связи в реальном времени. Беспроводная сеть 108 может быть беспроводной сетью любого типа, которая включает в себя сотовую сеть, беспроводную сеть передачи данных, беспроводную сеть голосовой связи и сеть, которая поддерживает голосовую связь и передачу данных, но которая не ограничена ими. Беспроводная сеть 108 может использовать множество форматов или протоколов, например, таких, которые определены стандартами, которые включают в себя глобальную систему мобильной связи (GSM), множественный доступ с кодовым разделением каналов (CDMA), беспроводной Ethernet (стандарт института инженеров по электротехнике и электронике 802.11), Wi-Fi и другие подобные стандарты и протоколы беспроводных сетей.
Источник 110 электропитания может обеспечивать электропитание для управления или зарядки карманного электронного устройства, и он может реализовываться с помощью одного или большего количества аккумуляторов или портов для внешнего блока электропитания, причем такой блок электропитания обеспечивает соответствующее электропитание для всех компонентов электронного блока 100.
Процессор 102 может взаимодействовать с другими компонентами, такими как оперативная память (ОП) 112, запоминающее устройство 114, дисплей 116, вспомогательная подсистема 118 ввода/вывода (в/в), порт 120 данных, динамик 122, система 124 записи и воспроизведения звуков, подсистема 126 ближней связи и другие подсистемы 128. Пользователь может вводить данные и управлять функциями карманного электронного устройства с помощью устройства ввода данных, связанного с процессором 102. Устройства ввода данных могут включать в себя кнопки или клавиатуру, или, в некоторых вариантах осуществления, графический интерфейс пользователя, создаваемый на дисплее 116, который может использовать касания и жесты, обнаруженные с помощью сенсорного покрытия на дисплее 116. Процессор 102 может взаимодействовать с клавиатурой и/или сенсорным покрытием через электронный контроллер (представлен на фиг. 3 с помощью элемента «другие подсистемы» 128). Как часть пользовательского интерфейса, информация, такая как текст, буквы и цифры, символы, изображения, значки и другие элементы, которые могут выводиться на экран или обрабатываться на карманном электронном устройстве, может отображаться на дисплее 116.
Для идентификации и аутентификации абонента для получения доступа к беспроводной сети 108 карманное электронное устройство может использовать карту модуля идентификатора абонента (SIM) 132. Также информация идентификатора пользователя может программироваться в запоминающем устройстве 114.
Принятый сигнал, такой как текстовое сообщение, электронное письмо или загруженная веб-страница, может обрабатываться с помощью подсистемы 104 связи и вводиться в процессор 102. Процессор 102 может обрабатывать принятый сигнал для вывода к дисплею 116 и/или к вспомогательной подсистеме 118 в/в. Пользователь беспроводного устройства может генерировать элементы данных, например, электронные письма, содержащие фотографии, которые могут передаваться по беспроводной сети 108 через подсистему 104 связи. Для голосовой связи вся работа карманного электронного устройства может быть аналогичной. Динамик 122 может использоваться для вывода звуковой информации, преобразованной из электрических сигналов, и система 124 записи и воспроизведения звуков может использоваться для преобразования звуковой информации в электрические сигналы для обработки.
Подсистема 138 камеры может включать в себя множество аппаратных, программных и аппаратно-программных модулей, которые необходимы для фиксации данных изображения (например, визуальных данных). Примеры данных изображения включают в себя фотоснимки и видеокадры, которые включают в себя движущиеся изображения файла видеоданных. Например, подсистема 138 камеры может включать в себя линзу 140, датчик 142 изображения и контроллер 144 положения линзы.
Процессор 102 может взаимодействовать с одним или большим количеством акселерометров 130 (также называют датчиком (ами) ускорения), который может использоваться для обнаружения направления гравитационных сил и обеспечиваемых пользователем сил ускорения. Процессор 102 может в общем случае функционировать для осуществления связи с одним или большим количеством акселерометров 130 для предоставления возможности оценивать длину пути согласно способу, описанному в данной работе. Каждый из одного или большего количества акселерометров 130 функционирует для выполнения измерения ускорения и генерации результатов измерения ускорения, соответствующих измеренному ускорению. Результат измерения ускорения может воплощаться в качестве сигнала, предназначенного для использования с помощью процессора 102. В некоторых вариантах осуществления один или большее количество акселерометров 130 может функционировать для вывода аналогового сигнала, соответствующего результату измерения ускорения. Например, каждый акселерометр 130 может выводить аналоговый сигнал напряжения, который пропорционален измеренным ускорениям. В некоторых вариантах осуществления один или большее количество акселерометров могут включать в себя любые цифровые и аналоговые компоненты, предназначенные для генерации сигнала, соответствующего измеренному ускорению. Один или большее количество акселерометров 130 могут быть любым из устройства масса-пружина, сервомеханизма, датчика деформации, резонансного устройства и т.п. В некоторых вариантах осуществления один или большее количество акселерометров 130 могут включать в себя по меньшей мере три акселерометра, адаптированные для выполнения измерения ускорений в трех перпендикулярных направлениях. В некоторых вариантах осуществления гироскоп 140 и/или компас 142 могут дополнительно интегрироваться в карманное электронное устройство. Гироскоп, компас и акселерометры 130 могут соединяться таким образом, чтобы обеспечивать сочетание датчиков. Следует отметить, что термин «обнаружение» и его производные могут относиться в настоящем раскрытии к действию считывания выходного сигнала из акселерометров 130.
Карманное электронное устройство может включать в себя операционную систему 134 и программы 136, причем и операционная система, и программы могут выполняться с помощью процессора 102. Операционная система 134 и программы 136 могут храниться в предназначенном для постоянного хранения данных обновляемом формате, например, в запоминающем устройстве 114. Дополнительные приложения или программы могут загружаться в карманное электронное устройство через беспроводную сеть 108, вспомогательную подсистему 118 в/в, порт 120 данных, подсистему 126 ближней связи или любую другую подсистему 128, подходящую для передачи программных файлов. Программы 136 могут включать в себя программные модули, такие как модуль выполнения измерения длины пути, который может отвечать за реализацию способа оценки длины пути, раскрытого в данной работе. Программы 136 могут также включать в себя графический интерфейс пользователя (GUI) для взаимодействия с пользователем и модулем оценки длины пути. Каждый из этих программных модулей может вызывать различные аппаратные и программные ресурсы в карманном электронном устройстве для выполнения функции. Кроме того, функции, описанные в настоящем раскрытии, могут реализовываться в различных частях электронного блока 100, независимо от того, являются ли такие части программными модулями или специализированными аппаратными и аппаратно-программными модулями. Во многих случаях может быть возможно реализовать ту же самую функцию больше чем в одной части электронного блока 100.
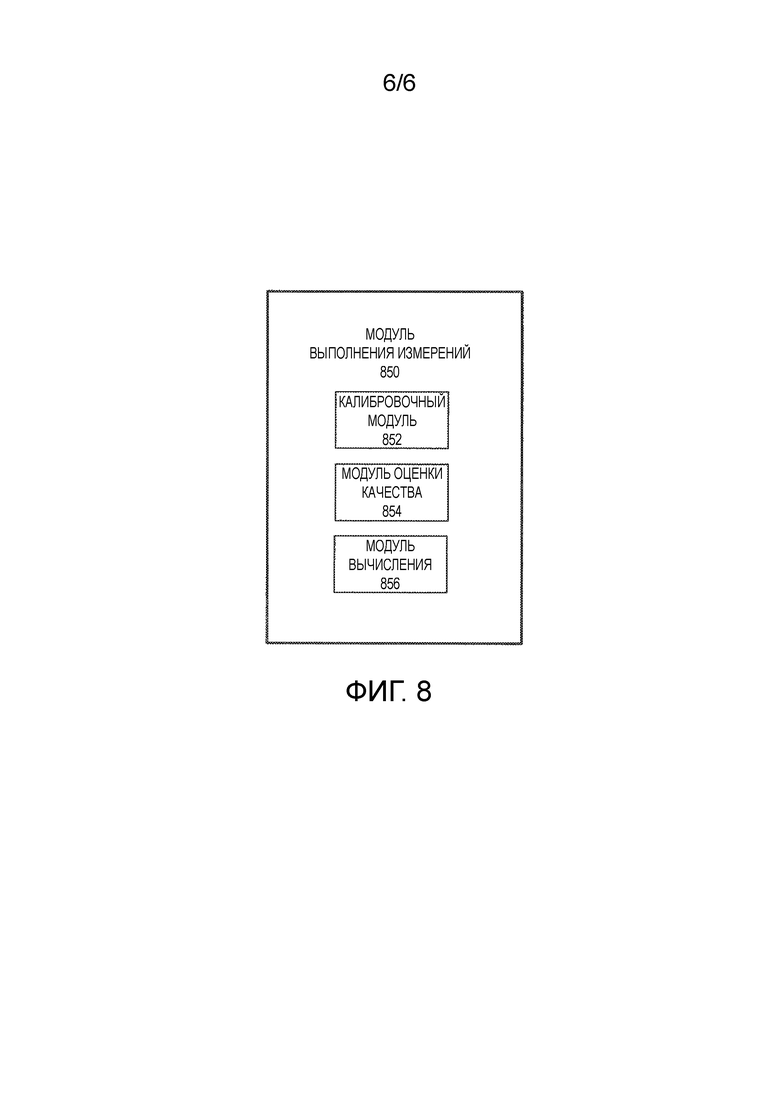
Согласно обучению, раскрытому в данной работе, карманное электронное устройство может содержать модуль 850 выполнения измерений.
Ссылка теперь сделана на фиг. 8. Фиг. 8 является функциональной схемой, показывающей модуль 850 выполнения измерений карманного электронного устройства на фиг. 1 согласно примеру раскрытого в настоящее время объекта изобретения. Модуль 850 выполнения измерений конфигурируется для выполнения процесса измерения, раскрытого в данной работе. Модуль 850 выполнения измерений может дополнительно содержать калибровочный модуль 852; модуль 854 оценки качества; и модуль 856 вычисления.
Калибровочный модуль 852 конфигурируется для выполнения калибровок, которые раскрыты в данной работе. Модуль 854 оценки качества конфигурируется для выполнения оценки качества, которое раскрыто в данной работе. Модуль 856 вычисления конфигурируется для вычисления длины пути, которое раскрыто в данной работе. Модуль 850 выполнения измерений, калибровочный модуль 852, модуль 854 оценки качества и модуль 856 вычисления могут интегрироваться, как часть процессора (например, процессора 102, описанного выше со ссылкой на фиг. 1) и/или запоминающего устройства. Также модуль 850 выполнения измерений, калибровочный модуль 852, модуль 854 оценки качества и модуль 856 вычисления могут быть внешними и функционально подключаться к процессору. Модули на фиг. 8 могут сосредотачиваться в одном месте или распределяться больше чем по одному месту. Более подробное описание различных операций различных модулей предоставлено ниже
Карманное электронное устройство и модуль 850 выполнения измерений оба являются компьютеризированным устройством, содержащим или иначе функционально подключенным по меньшей мере к одному компьютерному блоку обработки, конфигурируемому для выполнения различных операций, которые описаны ниже. Термины «блок обработки», «компьютер», «обрабатывающее устройство» или их разновидности должны расширенным образом истолковываться для охвата любого вида электронного устройства с возможностями обработки данных, которое включает в себя посредством неограничивающего примера персональный компьютер, сервер, вычислительную систему, устройство связи, процессор (например, процессор цифровой обработки сигналов (DSP), микроконтроллер, программируемая пользователем вентильная матрица (FPGA), специализированная интегральная схема (ASIC) и т.д.), любое другое электронное вычислительное устройство и/или любую их комбинацию. В некоторых примерах карманное электронное устройство может быть смартфоном, компьютерным планшетом или интеллектуальными часами.
В вариантах осуществления раскрытого в настоящее время объекта изобретения, меньшее количество, большее количество этапов и/или другие этапы, чем показано на фиг. 2, 6 и 7, могут выполняться. В вариантах осуществления раскрытого в настоящее время объекта изобретения один или несколько этапов, показанных на фиг. 2, 6 и 7, могут выполняться в другом порядке, и/или одна или большее количество групп этапов могут выполняться одновременно.
Фиг. 2 показывает в общем случае этапы способа выполнения измерения длины пути с помощью процедуры интегрирования согласно вариантам осуществления настоящего раскрытия. Способ выполнения измерения длины пути может воплощаться на карманном электронном устройстве, которое описано выше. На этапе S100 может обнаруживаться ускорение карманного электронного устройства, когда карманное электронное устройство перемещается по пути, который будет измеряться. Движение перемещения может выполняться в соответствии с линией пути. Обнаруженное ускорение может относиться к линейному ускорению, которое проецируется на линию пути. Как показано на фиг. 3, путь может обеспечиваться с помощью линии пути 155 на поверхности объекта 150. В некоторых вариантах осуществления опорная поверхность линии пути может вытягиваться перпендикулярно силе тяжести. Карманное электронное устройство 20 можно двигаться по поверхности объекта от начальной точки 151 к конечной точке 152 линии пути 155. Могут существовать различные конфигурации начальной позиции в зависимости от положения карманного электронного устройства в начальной и конечной точках 151, 152. В некоторых вариантах осуществления в начальной позиции край карманного электронного устройства 20 может быть перпендикулярен направлению пути, в котором вытянут путь, который будет измеряться. В некоторых вариантах осуществления начальная конфигурация может быть такой, что карманное электронное устройство 20 охватывает часть пути, который измеряется (как показано на фиг. 3). В некоторых вариантах осуществления (не показано) начальная конфигурация может быть такова, что карманное электронное устройство 20 не охватывает путь, который будет измеряться. Карманное электронное устройство 20 может конфигурироваться так, чтобы его информировали о конфигурации начальной позиции для надлежащего вычисления длины пути, например, через меню в GUI. Это предоставляет возможность компенсации начальной конфигурации и, в частности, результатов измерений карманного электронного устройства при выполнении измерения длины.
Этап S100 может, таким образом, обеспечивать график ускорения, содержащий последовательность точек дискретизации с временными метками, указывающих ускорение карманного электронного устройства между начальной точкой 151 и конечной точкой 152. Таймер может обеспечиваться и присоединяться к датчику ускорения так, чтобы ускорение обнаруживалось датчиком (ами) ускорения, когда таймер активируется. В некоторых вариантах осуществления таймер может активироваться пользователем в начальной точке 151, например, с помощью нажатия кнопки активации, и деактивироваться в конечной точке 152, например, с помощью отпускания кнопки активации. В некоторых вариантах осуществления движение перемещения может начинаться после истечения предопределенного периода после того, как таймер был активирован. В некоторых вариантах осуществления таймер может останавливаться после того, как предопределенный период истек после окончания движения перемещения. Это предоставляет возможность анализа обнаруженного ускорения без движения для обнаружения собственного шума датчика ускорения до фактического движения перемещения. Как объяснено выше, интересующее ускорение может быть проекцией ускорения на линию пути. Это может выполняться с помощью информации о положении, предоставленной с помощью карманного электронного устройства.
На этапе S110 график ускорения может интегрироваться по набору интервалов интегрирования. Интервалы интегрирования могут иметь уменьшающуюся протяженность, и исключается возрастающая начальная часть графика ускорения. Другими словами, интервалы интегрирования могут упорядочиваться от первого интервала интегрирования с самой большой протяженностью к последнему интервалу интегрирования самой маленькой протяженности, интервалы интегрирования постепенно исключают начальную фазу графика ускорения. Поэтому набор интегралов графика ускорения вычисляется по временным интервалам с уменьшающейся протяженностью и в большей степени исключая точки дискретизации начальной части графика ускорения. В некоторых вариантах осуществления интервалы интегрирования определяются рекурсивно с помощью первого интервала интегрирования (который может в некоторых вариантах осуществления соответствовать всем точкам дискретизации графика ускорения), и каждый последующий интервал интегрирования получается, удаляя самую раннюю точку дискретизации предыдущего интервала интегрирования. В некоторых вариантах осуществления начальная точка первого интервала интегрирования может определяться на основе обнаружения резкого изменения на графике ускорения. В некотором варианте осуществления количество интервалов интегрирования может составлять, например, половину количества точек дискретизации. Заявитель обнаружил, что это предоставляет возможность обеспечения удовлетворительной точности при ограничении вычислительной нагрузки. Фиг. 4 показывает примерный вариант осуществления, в котором набор интервалов интегрирования I1, I2, I3..., In представлен выше измеренного графика 200 ускорения. Следует отметить, что интервалы интегрирования таким образом произвольно индексируются на основе их протяженности для упрощения описания. Однако это, как считают, не ограничивает объем настоящего раскрытия. Как видно, I1 включает в себя все точки дискретизации графика 200 ускорения, т.е. тянется от времени t1, в котором начинается обнаружение ускорения, до времени tf, в котором заканчивается обнаружение ускорения. Дополнительно, I2 имеет протяженность короче, чем I1, и исключается начальная часть графика ускорения, т.е. тянется от времени t2, более позднего, чем t1, до времени tf, в котором останавливается обнаружение. Точно так же, I3 имеет протяженность короче, чем I2, и исключается начальная часть графика ускорения, больше чем в I2, потому что I3 тянется со времени t3, более позднего, чем t2, и до времени tf, в котором останавливается обнаружение. Этап S110 может поэтому обеспечивать набор графиков скорости, вычисленных с помощью интегрирования обнаруженного ускорения по набору интервалов интегрирования.
На этапе S120 набор расстояний может вычисляться с помощью интегрирования набора графиков скорости, полученных на этапе S110. В некоторых вариантах осуществления этап S120 может содержать коррекцию линейного смещения по меньшей мере на некоторых графиках скорости и интегрирование откорректированных графиков скорости. В некоторых вариантах осуществления линейное смещение может, например, корректироваться с помощью аппроксимации указанных по меньшей мере некоторых графиков скорости с помощью методов наименьшего квадрата и вычитания результирующих аппроксимированных линейных функций из соответствующих графиков скорости. Фиг. 5 показывает график 300 скорости и аппроксимированную линейную функцию 350, которая может вычисляться методами наименьшего квадрата, как объяснено выше. Также, как объяснено выше, вычитание аппроксимированной линейной функции 350 из графика 300 скорости может обеспечивать откорректированный график скорости. Откорректированный график скорости может использоваться вместо графика скорости на этапе S120 для вычислений соответствующего расстояния с помощью выполнения интегрирования. В некоторых вариантах осуществления коррекция по меньшей мере некоторых графиков скорости может выполняться с помощью вычитания полиномиальной функции первой степени, так, чтобы начальная и конечная секции по меньшей мере некоторых откорректированных графиков скорости были по существу равны нулю (т.е. расстояние между значениями начальной и конечной секций и нулевой осью было ниже предопределенного порогового значения).
На этапе S130 длина пути может оцениваться на основе набора вычисленных расстояний, полученных на этапе S120. Оценка длины пути может вовлекать статистический анализ набора вычисленных расстояний. Например, статистический анализ может включать в себя вычисление среднего значения по меньшей мере для некоторых (или всех) вычисленных расстояний, полученных из этапа S120. В некоторых вариантах осуществления статистический анализ может вовлекать методы кластеризации, например, одномерную кластеризацию вычисленных расстояний и поиск центра одномерного кластера. В некоторых вариантах осуществления могут обнаруживаться данные ускорения по трем осям. В этих вариантах осуществления вычисленные расстояния могут содержать три компоненты, и статистический анализ может вовлекать многомерную кластеризацию. Например, в одномерном подходе оценка длины может содержать округление каждого вычисленного расстояния до самого близкого целого числа для получения набора округленных расстояний, связанных с набором вычисленных расстояний; определение самого часто встречающегося округленного расстояния среди округленных расстояний, например, с помощью создания столбчатой гистограммы и определения набора соответствующих расстояний, состоящего из вычисленных расстояний, связанных с округленными расстояниями, удаленными меньше, чем на предопределенное целое число от самого часто встречающегося округленного расстояния. Например, предопределенное целое число может быть равно 1, 2 или 3 см. После этого статистический анализ может выполняться по отношению к набору соответствующих расстояний.
Ссылка теперь сделана на фиг. 6. Фиг. 6 является последовательностью операций, иллюстрирующей операции, выполняемые для вычисления расстояния длины пути с помощью процедуры интегрирования, согласно примерам раскрытого в настоящее время объекта изобретения. Операции, описанные со ссылкой на фиг. 6, могут выполняться с помощью карманного электронного устройства 20, описанного выше со ссылкой на фиг. 1 и 3.
На этапе 602 проверяется калибровки компаса карманного электронного устройства на истинный север или магнитный север. Согласно одному примеру магнит или магнитометр вместе с гироскопом в карманном электронном устройстве 20 используется в качестве компаса для определения направленности карманного электронного устройства 20 относительно земли.
Предварительная калибровочная процедура может выполняться (например, с помощью калибровочного модуля 852) для проверки компаса в карманном электронном устройстве 20 и определения, откалиброван ли компас достаточно на истинный север или магнитный север. В дополнение к определению текущего уровня калибровки во время предварительной калибровочной процедуры может проверяться, когда предыдущая калибровка выполнялась на карманном электронном устройстве 20. Если уровень калибровки недостаточен и/или время, прошедшее с выполнения предыдущей калибровки, больше, чем некоторый предопределенный период времени, то от пользователя может потребоваться выполнить ручную калибровку. Пользователю можно предлагать и инструктировать его, как выполнить калибровку. В некоторых примерах карманное электронное устройство 20 может автоматически выполнять калибровку для установки компаса в карманном электронном устройстве 20 по направлению на истинный север или магнитный север, используя калибровочный модуль 852, который конфигурируется для осуществления связи со средствами управления компасом карманного электронного устройства 20.
На этапе 604 получают результаты измерений ускорения карманного электронного устройства 20 для двух измерений (X, Y), когда карманное электронное устройство 20 проходит или перемещается по пути 155 (от точки 151 до точки 152). Согласно некоторым примерам датчики 130 ускорения и гироскоп 140 могут конфигурироваться для получения результатов измерений, и модуль 850 выполнения измерений может конфигурироваться для приема результатов измерений от датчиков. Карманное электронное устройство 20 может принимать вводимые пользователем данные, указывающие начало и окончание движения прохождения или перемещения карманного электронного устройства 20 по пути 155, из вводимых данных пользователем 128.
Этап 604 может таким образом обеспечивать два графика ускорения (Xacc, Yacc), каждый график ускорения содержит последовательность точек дискретизации с временными метками, указывающих ускорение карманного электронного устройства 20 между начальной точкой 151 и конечной точкой 152 для каждого из этих двух измерений (X, Y).
В дополнение к выполнению измерений этих X, Y значений ускорения движения (Xacc, Yacc), датчик (и), например, компас/магнитометр, может также обнаруживать ускорение движения из-за силы тяжести. Новые X, Y значения ускорения (Xacc, Yacc) могут вычисляться на основе ускорения движения из-за сила тяжести, например, в случае, когда путь не параллелен земле.
На этапе 604 дополнительная калибровка может дополнительно выполняться по отношению к этим X, Y значениям ускорения. В дополнение к компенсации этих X, Y значений ускорения для учета влияния силы тяжести эти X, Y значения ускорения могут нормализовываться. В дальнейшем термин «компенсированный» относиться к значениям после того, как устранено влияние силы тяжести и выполнена нормализация. Согласно некоторым примерам калибровочный модуль 852 может конфигурироваться для выполнения этой калибровки.
Дополнительно, на этапе 606 может также выполняться проверка качества. Для этих X, Y значений ускорения (Xacc, Yacc) эти X, Y значения скорости вычисляются с помощью выполнения интегрирования по отношению к этим X, Y значениям ускорения (Xacc, Yacc). Максимальное значение вычисляется с помощью максимальных значений полной скорости. Максимальное значение скорости используется в качестве указателя показателя качества. В некоторых примерах максимальное значение скорости может использоваться в качестве порогового значения для показателя качества. Соответственно, в таком случае пользователю может быть предложено и его можно проинструктировать выполнить процесс измерения снова с начала и на более высокой скорости. Согласно некоторым примерам модуль 854 оценки качества может конфигурироваться для выполнения этой проверки качества.
Дополнительно, на этапе 608 может выполняться проверка (например, с помощью модуля 856 вычисления), чтобы выяснить, определяется ли одно из измерений (X или Y) в качестве доминирующего измерения. Отношение между максимальными значениями этих X, Y значений скорости может проверяться, сравнивая с некоторым пороговым значением. Например, если одно из максимальных значений этих X, Y значений скорости (MaxXvel или MaxYvel) является предопределенной величиной, которая больше другого максимального значения (MaxYvel или MaxXvel), тогда это измерение (X или Y) может определяться в качестве доминирующего измерения. Если одно из измерений (X или Y) определяется в качестве доминирующего измерения, тогда один или большее количество последующих этапов может выполняться только по отношению к доминирующему измерению (X или Y) или может не использоваться. Если ни одно из измерений не определяется в качестве доминирующего измерения, то последующие этапы могут выполняться для обоих измерений (X и Y). Последующие этапы описывают случай, когда ни одно из измерений не определяется в качестве доминирующего измерения.
На этапе 610 идентифицируют начальную и конечную точки движения для обоих измерений X, Y. Согласно некоторым примерам модуль 856 вычисления может идентифицировать начальную и конечную точки движения. В некоторых примерах идентификация начальной и конечной точек движения (s1, e1 и s2, e2) выполняется с помощью различных весов. С этой целью могут использоваться различные типы весов, которые включают в себя, например: стандартное отклонение или наклон.
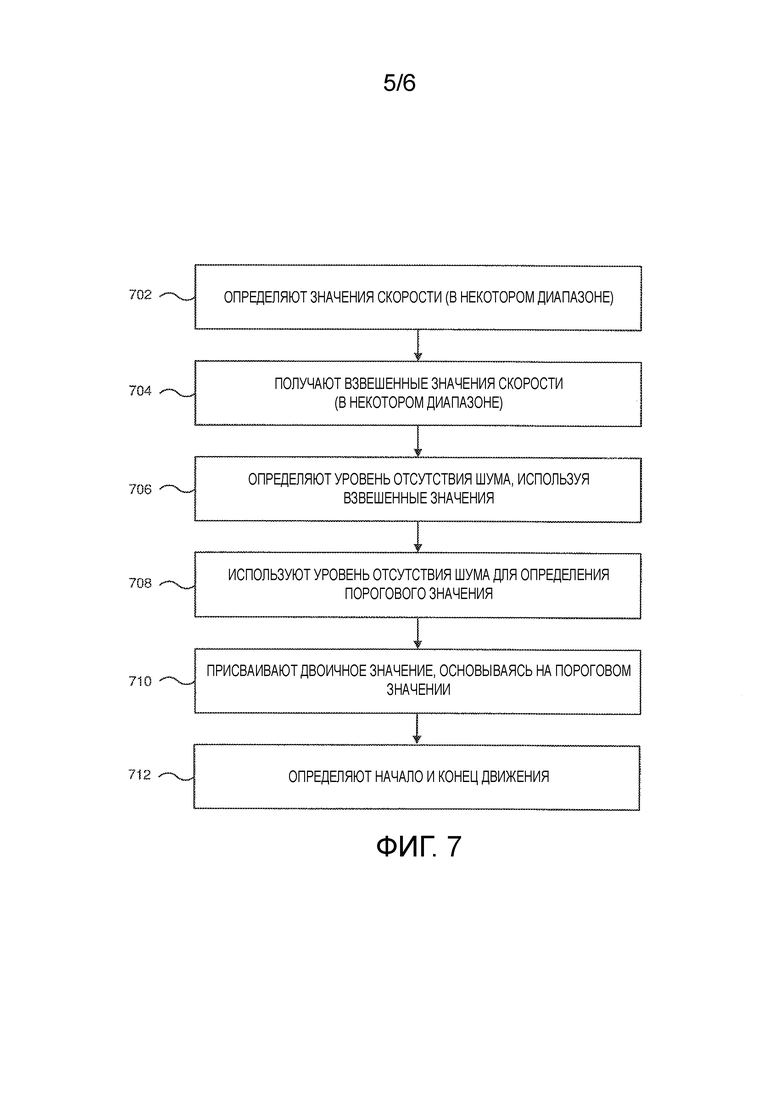
Ссылка теперь сделана на фиг. 7, описание фиг. 6 продолжено ниже. Фиг. 7 является последовательностью операций, показывающей способ идентификации начальной и конечной точек движения для обоих измерений X, Y (который может быть частью этапа 610). На этапе 702 согласно некоторым примерам определяются компенсированные абсолютные X, Y значения скорости (Xvel, Yvel) в некотором диапазоне.
На этапе 704 получают взвешенное значение скорости. В некоторых примерах скользящее окно стандартного отклонения предопределенного периода времени используется с помощью модуля 856 вычисления по отношению к этим X, Y значениям скорости (Xvel, Yvel) для вычисления стандартного отклонения (Std). Окно стандартного отклонения вычисляет различие между выборками. Когда изменения являются резкими (т.е. когда производная имеет высокое значение), результатом будут относительно высокие значения. Стандартное отклонение используется для усиления влияния и ослабления влияния некоторых диапазонов графика скорости. В некоторых примерах веса используются для усиления влияния низких значений, которые близки к нулю, так как обычно большая часть результатов измерений находится в этих областях. Также могут использоваться другие веса, такие как вычисление наклона.
На этапе 706 окно средних значений предопределенного периода времени, который равен или короче предопределенного промежутка времени, который определяется пользователю для ожидания перед выполнением измерения, используется (например, с помощью модуля 856 вычисления) по отношению к взвешенным значениям, полученным на этапе 704, для определения уровня отсутствия шума.
На этапе 708 некоторое процентное отношение выше или ниже уровня отсутствия шума определяется (например, с помощью модуля 856 вычисления) в качестве порогового значения, например, определяется в качестве предопределенного процентного отношения выше уровня отсутствия шума.
На этапе 710 двоичное значение (0 или 1) присваивают (например, с помощью модуля 856 вычисления) этим X, Y значениям скорости (Xvel, Yvel) на основе порогового значения, полученного на этапе 708. Если данное значение ниже порогового значения, то ему присваивают значение 0, а если данное значение выше порогового значения, то ему присваивают значение 1. Результатом является вектор для каждого измерения X, Y с одной или большим количеством прямоугольных функций.
На этапе 712 время начала и конца самой широкой прямоугольной функции для каждого измерения X, Y определяется (например, с помощью модуля 856 вычисления) в качестве начальной и конечной точек движения (s1, e1). В некоторых случаях будет существовать больше одной прямоугольной формы, что приводит к больше чем одной паре потенциальных начальной и конечной точек. В этом случае все пары проверяются, и одна или большее количество самых находящихся далеко друг от друга пар могут определяться в качестве начальной и конечной точек движения. Например, в случае, когда определяются две самые находящиеся далеко друг от друга пары, будет существовать два набора начальной и конечной точек движения (s1, e1 и s2, e2). Кроме того, проверка возможности работы может выполняться (например, с помощью модуля 854 оценки качества) по отношению к каждой из пар, чтобы выяснить, нужно ли эту пару вообще рассматривать. Время начала и окончания определенной самой находящейся далеко друг от друга пары (пар) будут применяться к компенсированным X, Y значениям скорости (Xvel, Yvel). Область этих X, Y значений скорости (Xvel, Yvel) между определенными начальной и конечной точками является длиной этого измерения X, Y. Последующие этапы описывают случай, когда существует больше одной прямоугольной функции.
Возвращаясь теперь к фиг. 6, на этапе 612 область между определенными начальной и конечной точками движения, полученными на этапе 610, интегрируется для каждого из измерений X, Y для вычисления длины в этом измерении (например, distX1, distX2 и distY1, distY2). Согласно некоторым примерам модуль 856 вычисления может конфигурироваться для выполнения интегрирования этих областей и вычисления этих длин.
Начальная и конечная точки движения для каждого из этих двух измерений X, Y, полученные на этапе 610, применяются (например, с помощью модуля 856 вычисления) к (X, Y значениям скорости Xvel, Yvel) для подходящего соответствующего каждого из этих двух измерений X, Y. Нормализованные X, Y значения скорости (Xvel, Yvel) интегрируются (например, с помощью модуля 856 вычисления) между начальной и конечной точками движения (между s1 и e1 и между s2 и e2) для вычисления длин для каждого измерения (distX1, distX2, и distY1, distY2).
На этапе 614 вычисляется полная длина для каждого измерения X, Y (например, с помощью модуля 856 вычисления) на основе вычисленных расстояний для каждой начальной и конечной точек движения, полученных на этапе 612.
На этапе 616 вычисляется окончательная длина на основе этих двух длин (totaldistX, totaldistY), полученных на этапе 614. В предыдущей процедуре были определены два скалярных числа, длина для X и длина для Y (totaldistX, totaldistY). В некоторых примерах процедура вычисления окончательной длины на основе этих двух длин выполняется (например, с помощью модуля 856 вычисления), используя уравнение Пифагора по отношению к вычисленным расстояниям для каждого измерения X, Y для вычисления квадратного корня из totaldistX^2+totaldistY^2 для вычисления окончательной длины (окончательной полной величины). Согласно некоторым примерам модуль 856 вычисления может конфигурироваться для выполнения этого вычисления, дисплей 116 может конфигурироваться для отображения результатов пользователю, запоминающее устройство 114 может конфигурироваться для хранения результатов, а подсистема 104 связи может конфигурироваться для передачи результатов к другому компьютерному устройству обработки, такому как сервер.
В случаях, когда существует доминирующее измерение, полная длина в доминирующем измерении, полученная на этапе 614, может быть окончательной длиной (нет никакой необходимости в дополнительном вычислении на этапе 616).
В случаях, когда существует только одна прямоугольная функция, длины для каждого измерения (distX1 и distY1), полученные на этапе 612, могут быть полными длинами для каждого измерения X, Y (totaldistX и totaldistY) (нет никакой необходимости в этапе 614, и процесс может идти от этапа 612 к этапу 616).
В некоторых случаях, например, когда измерение выполняется больше чем по одному измерению, используется проекция расстояния по необходимому измеренному пути.
Хотя некоторые особенности изобретения показаны и описаны в данной работе, множество модификаций, замен, изменений и их эквивалентов будут реализовываться в настоящее время специалистами. Нужно, поэтому, подразумевать, что прилагаемая формула изобретения предназначается для покрытия всех таких модификаций и изменений, которые находятся в пределах подлинного объема изобретения.
Следует признать, что описанные выше варианты осуществления упоминаются в качестве примера, и различные их особенности и комбинации этих особенностей могут варьироваться и изменяться.
Хотя показаны и описаны различные варианты осуществления, будет подразумеваться, что нет никакого намерения ограничивать изобретение таким раскрытием, а вместо этого оно предназначено для покрытия всех модификаций и альтернативных конструкций, находящихся в пределах формы изобретения, которая определена в прилагаемой формуле изобретения.
Будет также подразумеваться, что система согласно раскрытому в настоящее время объекту изобретения может реализовываться, по меньшей мере частично, как соответственно запрограммированный компьютер. Аналогично, раскрытый в настоящее время объект изобретения рассматривает считываемую компьютером компьютерную программу для выполнения раскрытого способа. Раскрытый в настоящее время объект изобретения дополнительно рассматривает машиночитаемое запоминающее устройство, реально осуществляющее программу из команд, выполняемых с помощью машины, для выполнения раскрытого способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ С ИСПОЛЬЗОВАНИЕМ КАРМАННОГО ЭЛЕКТРОННОГО УСТРОЙСТВА | 2016 |
|
RU2722057C2 |
| ВЫСОКОЭФФЕКТИВНОЕ МУЛЬТИПЛЕКСИРОВАНИЕ | 2018 |
|
RU2758202C2 |
| СТЫКОВКА С УПРАВЛЕНИЕМ ПО ИЗОБРАЖЕНИЯМ ДЛЯ ОФТАЛЬМОЛОГИЧЕСКИХ ХИРУРГИЧЕСКИХ СИСТЕМ | 2011 |
|
RU2574576C2 |
| СПОСОБ ВЫРАВНИВАНИЯ ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ С РАСШИРЕННЫМ ДИНАМИЧЕСКИМ ДИАПАЗОНОМ | 2017 |
|
RU2694148C2 |
| СПОСОБ И АППАРАТУРА МОНИТОРИНГА ДАННЫХ ДВИЖЕНИЯ | 2020 |
|
RU2785948C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, СПОСОБ ОЦЕНИВАНИЯ ВОДИТЕЛЯ И СЕРВЕР ХАРАКТЕРИСТИК ВОДИТЕЛЯ | 2016 |
|
RU2686387C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ТРЕХМЕРНОГО ТЕЛА | 2011 |
|
RU2553796C2 |
| ОПРЕДЕЛЕНИЕ СКОРОСТИ МНОГОМЕРНОГО ПЕРЕМЕЩЕНИЯ В ГЛОБАЛЬНОЙ СИСТЕМЕ КООРДИНАТ | 2013 |
|
RU2629551C2 |
| СПОСОБ ОЦЕНКИ СТРУКТУРНЫХ ИЗМЕНЕНИЙ ОБРАЗЦА МАТЕРИАЛА В РЕЗУЛЬТАТЕ ВОЗДЕЙСТВИЯ НА ОБРАЗЕЦ | 2014 |
|
RU2673774C2 |
| ИЗМЕРЕНИЕ ВЛАЖНОГО ГАЗА | 2007 |
|
RU2453816C2 |
Группа изобретений относится к карманным электронным устройствам. Способ измерения длины пути с использованием карманного электронного устройства содержит этапы, на которых: обнаруживают ускорение карманного электронного устройства, когда карманное электронное устройство перемещается по пути, таким образом получая график ускорения карманного устройства; и вычисляют длину пути из графика ускорения с помощью процедуры интегрирования. В некоторых случаях используется проекция расстояния по необходимому измеренному пути. Технический результат – повышение точности измерения длины пути. 4 н. и 29 з.п. ф-лы, 8 ил.
1. Способ измерения длины пути с использованием карманного электронного устройства, содержащего множество датчиков ускорения, причем способ содержит использование процессора для выполнения этапов, на которых:
обнаруживают ускорение карманного электронного устройства для первого измерения и ускорение карманного электронного устройства для второго измерения, когда карманное электронное устройство перемещается по пути, таким образом получая первый график ускорения карманного устройства для первого измерения и второй график ускорения карманного устройства для второго измерения;
вычисляют первую длину пути из первого графика ускорения, используя первую процедуру интегрирования;
вычисляют вторую длину пути из второго графика ускорения, используя вторую процедуру интегрирования; и
вычисляют окончательную длину пути на основе первой длины пути и второй длины пути.
2. Способ по п. 1, причем указанные первая и вторая процедуры интегрирования включают в себя этапы, на которых:
вычисляют набор графиков скорости с помощью интегрирования графика ускорения по набору интервалов интегрирования, причем интервалы интегрирования имеют уменьшающуюся протяженность и исключается возрастающая начальная часть графика ускорения;
вычисляют набор расстояний с помощью интегрирования набора графиков скорости; и
оценивают длину пути на основе набора вычисленных расстояний.
3. Способ по п. 2, в котором конечная точка каждого интервала интегрирования соответствует последнему обнаруженному ускорению.
4. Способ по п. 2, в котором начальная точка интервала интегрирования с самой большой протяженностью определяется с помощью анализа графика ускорения.
5. Способ по п. 1, содержащий анализ графика ускорения для обнаружения существенного изменения ускорения.
6. Способ по п. 1, содержащий анализ графика ускорения для обнаружения шума датчика ускорения.
7. Способ по п. 2, в котором начальная точка каждого последующего интервала интегрирования, расположенного после интервала интегрирования с самой большой протяженностью, соответствует ускорению, обнаруженному после начальной точки интервала интегрирования с самой большой протяженностью.
8. Способ по п. 2, в котором начальная точка интервала интегрирования с самой большой протяженностью соответствует первому обнаруженному значению.
9. Способ по п. 2, в котором вычисление длины пути основано на статистическом анализе вычисленного расстояния.
10. Способ по п. 2, содержащий коррекцию по меньшей мере некоторых графиков скорости и вычисление набора расстояний с помощью по меньшей мере некоторых откорректированных графиков скорости.
11. Способ по п. 1, в котором указанные первая и вторая процедуры интегрирования включают в себя этапы, на которых:
идентифицируют начальную и конечную точки движения; и
выполняют интегрирование между начальной и конечной точками движения для нахождения длины пути.
12. Способ по п. 11, содержащий идентификацию начальной и конечной точек движения, используя по меньшей мере один тип взвешивания.
13. Способ по п. 11, содержащий вычисление максимальной скорости и использование этой максимальной скорости для указания качества выполнения измерения.
14. Способ по п. 11, содержащий проверку доминирующего измерения.
15. Способ по п. 1, содержащий проецирование расстояния движения по необходимому измеренному пути.
16. Способ по п. 1, содержащий выполнение измерения направленности с помощью датчика гироскопа.
17. Способ по п. 16, содержащий калибровку результатов измерений ускорения для компенсации потенциальной неточности направленности.
18. Способ по п. 1, содержащий выполнение измерения ускорения с помощью датчика ускорения.
19. Способ по п. 1, содержащий калибровку карманного электронного устройства на истинный север или магнитный север.
20. Способ по п. 1, в котором указанная процедура получения результатов измерений ускорения карманного электронного устройства дополнительно содержит прием вводимых пользователем данных, указывающих начало и окончание движения прохождения карманного электронного устройства по пути.
21. Способ по любому из предыдущих пунктов, в котором указанное карманное электронное устройство является смартфоном.
22. Компьютерно-читаемый носитель, хранящий считываемые компьютером команды, которые, когда выполняются с помощью карманного электронного устройства, перемещающегося по пути, который должен измеряться, побуждают карманное электронное устройство измерять длину пути посредством:
обнаружения ускорения карманного электронного устройства для первого измерения и ускорения карманного электронного устройства для второго измерения, когда карманное электронное устройство перемещается по пути, таким образом получая первый график ускорения карманного устройства для первого измерения и второй график ускорения карманного устройства для второго измерения; и
вычисления первой длины пути из первого графика ускорения, с использованием первой процедуры интегрирования;
вычисления второй длины пути из второго графика ускорения с использованием второй процедуры интегрирования; и
вычисления окончательной длины пути на основе первой длины пути и второй длины пути.
23. Компьютерно-читаемый носитель, хранящий считываемые компьютером команды по п. 22, причем указанные первая и вторая процедуры интегрирования содержат этапы, на которых:
вычисляют набор графиков скорости с помощью интегрирования графика ускорения по набору интервалов интегрирования, причем интервалы интегрирования имеют уменьшающуюся протяженность и исключается возрастающая начальная часть графика ускорения;
вычисляют набор расстояний с помощью интегрирования набора графиков скорости; и
оценивают длину пути на основе набора вычисленных расстояний.
24. Компьютерно-читаемый носитель, хранящий считываемые компьютером команды по п. 22, в котором указанные первая и вторая процедуры интегрирования содержат этапы, на которых:
идентифицируют начальную и конечную точки движения; и
выполняют интегрирование между начальной и конечной точками движения для нахождения длины пути.
25. Карманное электронное устройство, выполненное с возможностью измерения длины пути, причем карманное электронное устройство содержит:
первый датчик ускорения, выполненный с возможностью обнаружения ускорения карманного электронного устройства для первого измерения;
второй датчик ускорения, выполненный с возможностью обнаружения ускорения карманного электронного устройства для второго измерения;
компьютерное запоминающее устройство; и
процессор, функционально связанный с запоминающим устройством и с датчиком ускорения, причем запоминающее устройство включает в себя команды для побуждения процессора:
обнаруживать ускорение карманного электронного устройства для первого измерения и ускорение карманного электронного устройства для второго измерения, когда карманное электронное устройство перемещается по пути, таким образом получая первый график ускорения карманного устройства для первого измерения и второй график ускорения карманного устройства для второго измерения;
вычислять первую длину пути из первого графика ускорения, используя первую процедуру интегрирования;
вычислять вторую длину пути из второго графика ускорения, используя вторую процедуру интегрирования; и
вычислять окончательную длину пути на основе первой длины пути и второй длины пути.
26. Карманное электронное устройство по п. 25, причем указанные первая и вторая процедуры интегрирования побуждают процессор:
вычислять набор графиков скорости с помощью интегрирования графика ускорения по набору интервалов интегрирования, причем интервалы интегрирования имеют уменьшающуюся протяженность и исключается возрастающая начальная часть графика ускорения;
вычислять набор расстояний с помощью интегрирования набора графиков скорости; и
оценивать длину пути на основе набора вычисленных расстояний.
27. Карманное электронное устройство по п. 25, указанные первая и вторая процедуры интегрирования побуждают процессор:
идентифицировать начальную и конечную точки движения; и
выполнять интегрирование между начальной и конечной точками движения для нахождения длины пути.
28. Модуль выполнения измерений для карманного электронного устройства, причем модуль выполнения измерений выполнен с возможностью измерения длины пути и содержит:
пользовательский интерфейс для приема вводимых пользователем данных, указывающих начало и окончание движения перемещения карманного электронного устройства по пути;
блок приемника данных, выполненный с возможностью получения из множества датчиков ускорения первого графика ускорения карманного устройства для первого измерения и второго графика ускорения карманного устройства для второго измерения, причем графики ускорения указывают ускорение карманного электронного устройства, когда карманное электронное устройство перемещается по пути для первого измерения, и ускорение карманного электронного устройства для второго измерения;
блок обработки данных, выполненный с возможностью:
вычисления первой длины пути из первого графика ускорения с использованием первой процедуры интегрирования;
вычисления второй длины пути из второго графика ускорения с использованием второй процедуры интегрирования; и
вычисления окончательной длины пути на основе первой длины пути и второй длины пути; и
устройство вывода, выполненное с возможностью вывода вычисленной окончательной длины пути к пользователю.
29. Модуль выполнения измерений по п. 28, причем указанные первая и вторая процедуры интегрирования побуждают блок обработки данных:
вычислять набор графиков скорости с помощью интегрирования графика ускорения по набору интервалов интегрирования, причем интервалы интегрирования имеют уменьшающуюся протяженность и исключается возрастающая начальная часть графика ускорения;
вычислять набор расстояний с помощью интегрирования набора графиков скорости; и
оценивать длину пути на основе набора вычисленных расстояний.
30. Модуль выполнения измерений по п. 28, указанные первая и вторая процедуры интегрирования побуждают блок обработки данных:
идентифицировать начальную и конечную точки движения; и
выполнять интегрирование между начальной и конечной точками движения для нахождения длины пути.
31. Способ по п. 1, в котором первая процедура интегрирования и вторая процедура интегрирования являются одинаковыми процедурами интегрирования.
32. Компьютерно-читаемый носитель, хранящий считываемые компьютером команды по п. 22, в котором первая процедура интегрирования и вторая процедура интегрирования являются одинаковыми процедурами интегрирования.
33. Карманное электронное устройство по п. 25, в котором первая процедура интегрирования и вторая процедура интегрирования являются одинаковыми процедурами интегрирования.
| WO 2004018971 A1, 04.03.2004 | |||
| WO 2014203433 A1, 24.12.2014 | |||
| CN 103383253 A, 06.11.2013 | |||
| РЕДУЦИРНАЯ МАШИНА | 1950 |
|
SU87540A1 |

