Изобретение относится к области диагностики состояния оборудования и может быть использовано для повышения эффективности работы диагностических средств путем оптимальной адаптивной фильтрации (выделения) полезного сигнала, характеризующего состояние диагностируемого оборудования, при наличии помехи, создаваемой машинами и механизмами, работа которых характеризуется повторяющимися во времени циклами. К такому цикловому оборудованию относятся роторные машины (насосы, турбины, преобразователи, электродвигатели и т.п.) и машины циклического действия (дизели, дизельгенераторы, компрессоры).
Известен адаптивный компенсатор помех, содержащий первый и второй квадратурные фильтры, выходы которых соединены с входами первого сумматора, а входы - с выходом вычитателя, второй сумматор, отличающийся тем, что в него введены первый - третий нормирующие усилители, третий квадратурный фильтр, усилитель-инвертор и амплитудный ограничитель, причем первый нормирующий усилитель соединен входом с первым входом компенсатора, а выходом через второй сумматор и третий нормирующий усилитель - с опорным входом первого квадратурного фильтра, выход второго сумматора через усилитель-инвертор соединен с входом третьего квадратурного фильтра, выход которого соединен с вторым входом второго сумматора, вход второго нормирующего усилителя является вторым входом компенсатора, а выход соединен с опорными входами второго и третьего квадратурных фильтров, кроме того, выход первого сумматора соединен с входом вычитателя, с выходом компенсатора и с входом амплитудного ограничителя, выход которого соединен с вторым входом вычитателя (Патент РФ №2115233 МПК Н04В 1/10 от 11.07.1994 г.).
Недостатком данного компенсатора является невозможность осуществления адаптивной компенсации помех, создаваемых цикловым оборудованием, т.е. машинами и механизмами, работа которых характеризуется повторяющимися во времени циклами.
Известно так же что вибрационный спектр ротора (см. например Ширман А. и др. Практическая вибродиагностика и мониторинг состояния механического оборудования, Москва, 1996, с 16-18.) представляет сумму гармонических составляющих основной частоты возбуждения, т.е. частоте вращения ротора. Вместе с тем, в этом источнике не приводятся описания технических решений, позволяющих обеспечить подавления помехи, вызванной вибросигналом ротора.
Другим близким по технической сущности и достигаемому результату аналогом к предлагаемому устройству является адаптивный компенсатор помех, содержащий линейный опорный приемник, принимающий сигнал источника помехи, линейный основной приемник, принимающий суммарный сигнал от источника полезного сигнала и источника помехи, адаптивный фильтр, сумматор с инвертирующим и прямым входами, причем опорный приемник соединен с первым входом адаптивного фильтра, выход адаптивного фильтра соединен с инвертирующим входом сумматора, основной приемник соединен с прямым входом сумматора, а выход сумматора, являющийся выходом адаптивного компенсатора помех, соединен со вторым входом адаптивного фильтра (Уидроу и др. «Адаптивные компенсаторы помех. Принципы построения и применения», ТИИЭР, 1975, т. 63, №12).
Данный адаптивный компенсатор помех является реализацией оптимального фильтра Винера. Основной приемник компенсатора принимает смесь s+n0 полезного сигнала s и помехи n0, опорный приемник принимает помеху n1. Оптимальность адаптивного компенсатора, т.е. его способность на практике обеспечивать наилучшую винеровскую фильтрацию (выделение) полезного сигнала, может быть реализована, если соблюдаются следующие необходимые условия:
- опорный приемник принимает только помеху n1, и не чувствителен к действию полезного сигнала;
- полезный сигнал s некоррелирован с помеховыми сигналами n0 и n1;
- помеховые сигналы n0 и n1 коррелированны, однако, априори функция корреляции неизвестна.
При нарушении первого условия оптимальности, т.е. при попадании полезного сигнала в опорный канал, происходит его искажение на выходе компенсатора. При этом, чем выше уровень полезного сигнала в сигнале опорного приемника, тем сильнее полезный сигнал искажается на выходе компенсатора. Поэтому обычно стремятся размещать линейный опорный приемник компенсатора так, чтобы он чувствовал практически только сигнал источника помехи. Это, однако, далеко не всегда удается.
Ситуация, когда применение линейного опорного приемника не позволяет решить на практике задачу оптимальной (наилучшей) винеровской фильтрации возникает, в частности, при диагностике состояния заданного судового механизма в процессе его эксплуатации при движении судна, когда отключение механизма - источника помехи - по той или иной причине невозможно. Если диагностируемый механизм и механизм - источник помехи - жестко установлены на одной раме, то линейный опорный приемник (акселерометр или микрофон), связанный с механизмом - источником помехи, будет воспринимать не только колебания, возбуждаемые механизмом - источником помехи, но и колебания, возбуждаемые диагностируемым механизмом, которые по раме и по воздушной среде распространяются от этого механизма до механизма - источника помехи. Чем выше уровень колебаний, возбуждаемых диагностируемым механизмом в точке установки линейного опорного приемника, тем больше искажается полезный сигнал на выходе адаптивного компенсатора помех, и, соответственно, тем менее точными и достоверными становится результаты диагностики состояния исследуемого судового механизма. В пределе, когда в опорном приемнике уровень колебаний, возбуждаемых диагностируемым механизмом, соизмерим или превышает уровень колебаний, возбуждаемых механизмом - источником помехи, искажения полезного сигнала на выходе адаптивного компенсатора становятся недопустимыми, и диагностика состояния исследуемого судового механизма становится невозможной.
Недостатком данного адаптивного компенсатора помех в подобной ситуации является то, что в качестве опорного приемника в нем используется линейный приемник, который принимает не только сигнал механизма - источника помехи, но и сигнал диагностируемого механизма, что приводит к искажению полезного сигнала на выходе компенсатора, и, как следствие, к потере точности и достоверности результатов диагностики.
Однако, задача оптимальной винеровской фильтрации в ситуации, рассмотренной выше, может быть решена на практике путем использования в адаптивном компенсаторе опорного приемника, который чувствителен только к сигналу механизма - источника помехи, с которым он связан, и нечувствителен к сигналу диагностируемого механизма - источника полезного сигнала. Создание таких приемников, возможно, если источником помех является цикловое оборудование, т.е. такие машины и механизмы, работа которых характеризуется повторяющимися во времени циклами.
В заявке авторов RU №2014122501 предлагался «Адаптивный компенсатор помех», содержащий опорный приемник, выполненный в виде последовательно соединенных датчика оборотов и синтезатора гармоник, контрольный приемник, перестраиваемый фильтр, сумматор с инвертирующим и прямым входами, причем опорный приемник последовательно соединен с входом синтезатора гармоник, выход которого соединен с первым входом перестраиваемого фильтра, причем выход перестраиваемого фильтра соединен с инвертирующим входом сумматора, контрольный приемник соединен с прямым входом сумматора, а выход сумматора параллельно соединен со вторым входом перестраиваемого фильтра. Это решение выбрано авторами в качестве прототипа.
В качестве основного недостатка прототипа является низкая точность датчиков оборотов ротора, применяемых в промышленности. Величина электрического сигнала, снимаемого с подобных датчиков (например, тахогенераторов) должна быть пропорциональна числу оборотов в единицу времени. Однако присутствие в них коллекторно-щеточного узла с конечным размером коллекторов приводит к появлению флуктуаций снимаемого электрического сигнала и снижению точности измерения частоты оборотов.
Этих недостатков лишены индукционные или оптические датчики измерения угла поворота ротора. Электрические сигналы, снимаемые с подобных устройств, представляют собой набор импульсов с периодом следования кратным периоду оборота ротора.
Целью изобретения является повышение точности измерения полезного сигнала, характеризующего состояние диагностируемого оборудования, на фоне помех, создаваемых цикловым оборудованием.
Технический результат достигается за счет того, что адаптивный компенсатор помех, содержащий связанный с цикловым механизмом - источником помехи - нелинейный приемник с синтезатором гармоник для формирования опорного сигнала, коррелированного с сигналом механизма - источника помехи, линейный основной приемник, принимающий суммарный сигнал от диагностируемого механизма - источника полезного сигнала, и механизма - источника помехи, адаптивный фильтр, сумматор с инвертирующим и прямым входами, причем опорный приемник соединен с первым входом адаптивного фильтра, выход адаптивного фильтра соединен с инвертирующим входом сумматора, основной приемник соединен с прямым входом сумматора, а выход сумматора, являющийся выходом адаптивного компенсатора помех, соединен со вторым входом адаптивного фильтра, при этом нелинейный приемник выполнен в виде последовательно соединенных датчика времени цикла работы механизма - источника помехи, а синтезатор гармоник выполнен в виде генератора импульсов с периодом времени цикла работы роторного механизма.
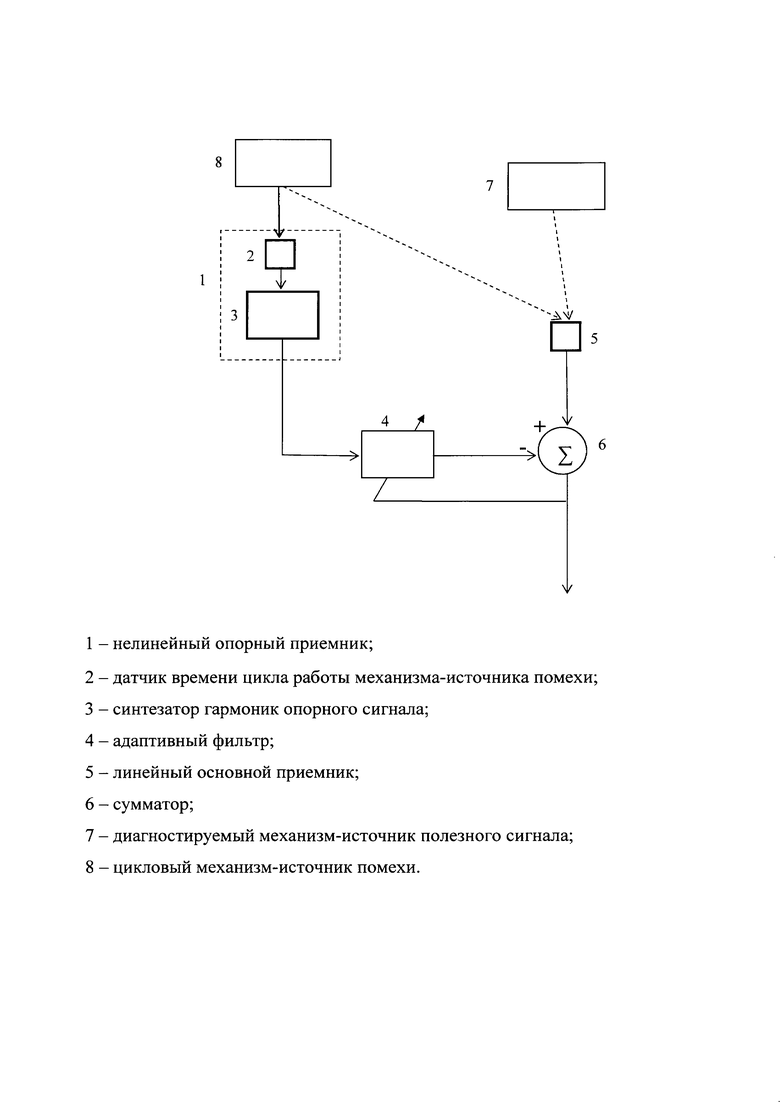
На рисунке приведена схема предложенного устройства.
Адаптивный компенсатор помех содержит связанный с цикловым механизмом 8 - источником помехи, нелинейный опорный приемник 1, выполненный в виде последовательно соединенных датчика 2 времени цикла работы механизма 8 и формирователя 3 опорного сигнала, в котором синтезируется сигнал, коррелированный с сигналом механизма 8, линейный основной приемник 5, принимающий суммарный сигнал от диагностируемого механизма 7 и механизма 8 - источника помехи, адаптивный фильтр 4, сумматор 6 с инвертирующим и прямым входами, причем выход формирователя 3 опорного сигнала соединен с первым входом адаптивного фильтра 4, выход адаптивного фильтра соединен с инвертирующим входом сумматора 6, основной приемник 5 соединен с прямым входом сумматора 6, а выход сумматора, являющийся выходом адаптивного компенсатора помех, соединен со вторым входом адаптивного фильтра 4.
Устройство работает следующим образом.
Основной приемник 5 принимает смесь s+n0 полезного сигнала s и помехи n0, возбуждаемых соответственно диагностируемым механизмом 7 и механизмом 8 - источником помехи. Предполагается, что полезный сигнал s и помеха n0 некоррелированы. Если источником помехи является роторный механизм, то помеха n0 представляет собой периодический сигнал, период которого равен времени Т цикла работы этого механизма. Положим, что периодическая помеха n0 является взвешенной суммой М первых гармоник основной частоты ω0=2π/Т, т.е. частоты вращения вала роторного механизма 8. Веса (амплитуды) гармоник при этом зависят от формы помехи.
Опорный сигнал n1, несущий информацию о помехе, возбуждаемой роторным механизмом 8, формируется на выходе нелинейного опорного приемника 1 следующим образом. С помощью датчика 2, связанного с валом роторного механизма 8, непрерывно на каждом обороте вала измеряется время Т цикла работы этого механизма, т.е. период вращения вала механизма. Затем в формирователе 3 опорного сигнала синтезируется периодический опорный сигнал n1 в виде суммы М первых гармоник частоты ω0=2π/Т вращения вала роторного механизма 8. Поскольку амплитуды этих гармоник равны, постоянны во времени и не зависят от формы сигнала роторного механизма - источника помехи, опорный приемник является нелинейным. Очевидно, что нелинейный опорный приемник 1 не чувствителен к действию полезного сигнала, возбуждаемого диагностируемым механизмом 7, а помеховые сигналы n0 и n1 в основном и опорном каналах предложенного устройства коррелированны.
Таким образом, если полезный сигнал s и помеха n0 некоррелированы, выполняются все, перечисленные выше, неоходимые условия оптимальности предложенного адаптивного компенсатора, т.е. он способен на практике обеспечивать наилучшую винеровскую фильтрацию (выделение) полезного сигнала s, характеризующего состояние диагностируемого механизма 7, на фоне помехи, создаваемой роторным механизмом 8.
Последовательность преобразований сигналов основного и опорного приемников в предложенном компенсаторе происходит точно так же, как и в устройстве - прототипе. Эти преобразования происходят следующим образом. Проходя через адаптивный фильтр 4, опорный сигнал n1 образует на его выходе сигнал у. Импульсная характеристика фильтра автоматически регулируется таким образом, чтобы сигнал у как можно меньше отличался от сигнала помехи n0. Затем сигнал s+n0 основного приемника и выходной сигнал у адаптивного фильтра подаются на сумматор 6, работающий как вычитающее устройство. В результате на выходе сумматора, который является выходом компенсатора, формируется сигнал z=s+n0-у.
Выходной сигнал у является наилучшей, в смысле минимума СКО (среднеквадратичной ошибки), оценкой помехи n0 в основном канале компенсатора. Следовательно, практически точно выполняется равенство у=n0. Это означает, что выходной сигнал компенсатора z является наилучшей оценкой полезного сигнала s, характеризующего состояние диагностируемого механизма 7, т.е. имеет место равенство z=s.
Важным фактором успешной работы компенсатора помех является реализация нелинейного опорного приемника 1 в виде последовательно соединенных датчика 2 времени цикла работы роторного механизма 8 -источника помехи, и формирователя 3 опорного сигнала. С помощью датчика 2, связанного с валом роторного механизма 8, измеряется время цикла его работы, т.е. период вращения вала механизма. Затем в формирователе опорного сигнала синтезируется, как сумма заданного числа гармоник частоты вращения вала роторного механизма 8, периодический опорный сигнал, период которого равен измеренному периоду вращения вала роторного механизма 8 - источника помехи.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР | 2012 |
|
RU2506692C1 |
| СИНТЕЗАТОР ЧАСТОТ ФАЗОМЕТРИЧЕСКИХ УСТРОЙСТВ | 1989 |
|
RU2030110C1 |
| УСТРОЙСТВО ПОИСКА ПО ЗАДЕРЖКЕ СИГНАЛОВ СО СКАЧКООБРАЗНЫМ ИЗМЕНЕНИЕМ ЧАСТОТЫ | 2001 |
|
RU2205505C2 |
| Цифровой синтезатор частот с частотной модуляцией | 1988 |
|
SU1589388A1 |
| УСТРОЙСТВО ПОИСКА ПО ЗАДЕРЖКЕ СИГНАЛОВ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2001 |
|
RU2208295C2 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ ПАКЕТАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2411651C2 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ ПОМЕХ | 2003 |
|
RU2269200C2 |
| МНОГОКАНАЛЬНОЕ КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ ПРИЕМНОЕ УСТРОЙСТВО | 2002 |
|
RU2205422C1 |
| УСТРОЙСТВО И СПОСОБ КОМПЕНСАЦИИ УЗКОПОЛОСНЫХ ПОМЕХ В ЦИФРОВЫХ РАДИОСИСТЕМАХ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2013 |
|
RU2552850C2 |
| УСТРОЙСТВО ДЛЯ ВЫДЕЛЕНИЯ И ПРЕОБРАЗОВАНИЯ ПОЛЕЗНОЙ (ИНФОРМАЦИОННОЙ) СОСТАВЛЯЮЩЕЙ СИГНАЛА ДАТЧИКА РАСХОДОМЕРА ВИХРЕВОГО ТИПА | 2000 |
|
RU2176380C1 |
Изобретение относится к области диагностики состояния оборудования и может быть использовано для повышения эффективности работы диагностических средств путем оптимальной адаптивной фильтрации (выделения) полезного сигнала, характеризующего состояние диагностируемого оборудования, при наличии помехи, создаваемой машинами и механизмами, работа которых характеризуется повторяющимися во времени циклами. К такому цикловому оборудованию относятся роторные машины (насосы, турбины, преобразователи, электродвигатели и т.п.) и машины циклического действия (дизели, дизель генераторы, компрессоры). Техническим результатом изобретения является повышение точности выделения полезного сигнала, характеризующего состояние диагностируемого оборудования, на фоне помех, создаваемых цикловым оборудованием. Технический результат достигается за счет того, что адаптивный компенсатор помех, содержащий опорный приемник, выполненный в виде последовательно соединенных датчика оборотов и синтезатора гармоник, контрольный приемник, перестраиваемый фильтр, сумматор с инвертирующим и прямым входами, причем опорный приемник последовательно соединен с входом синтезатора гармоник, выход которого соединен с первым входом перестраиваемого фильтра, причем выход перестраиваемого фильтра соединен с инвертирующим входом сумматора, контрольный приемник соединен с прямым входом сумматора, а выход сумматора параллельно соединен со вторым входом перестраиваемого фильтра, отличающийся тем, что опорный приемник выполнен в виде датчика времени цикла работы роторного механизма, а синтезатор гармоник выполнен в виде генератора импульсов с периодом времени цикла работы роторного механизма. 1 ил.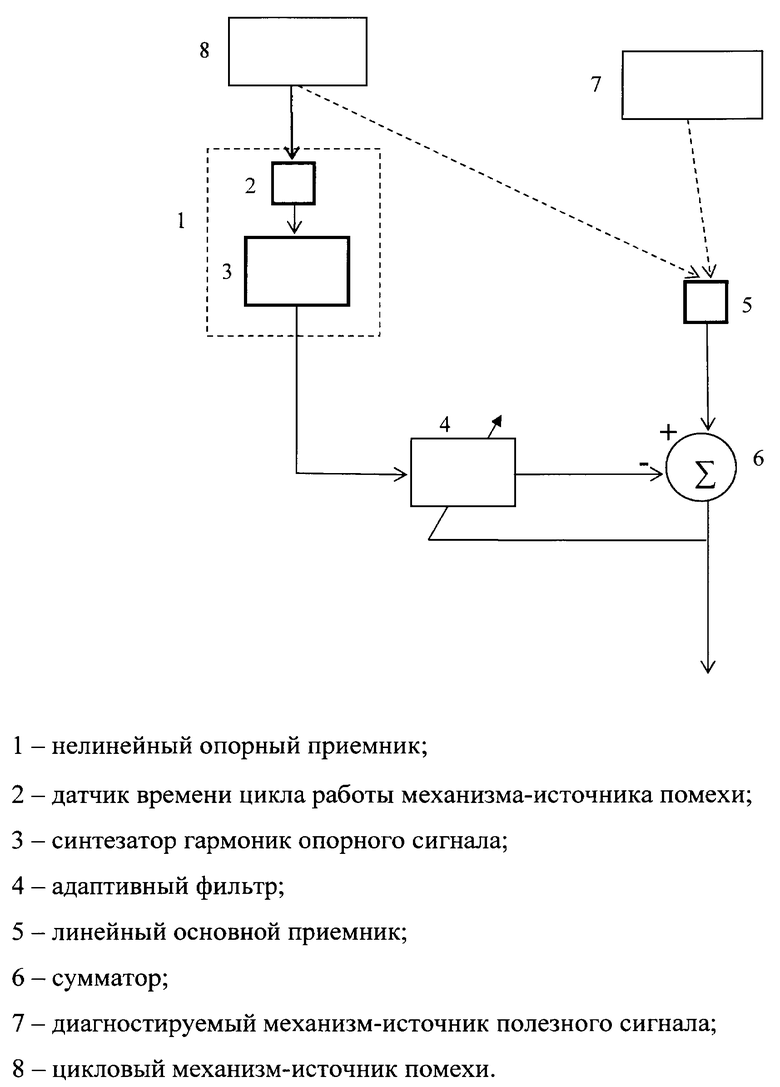
Адаптивный компенсатор помех, содержащий опорный приемник, выполненный в виде последовательно соединенных датчика оборотов и синтезатора гармоник, контрольный приемник, перестраиваемый фильтр, сумматор с инвертирующим и прямым входами, причем опорный приемник последовательно соединен с входом синтезатора гармоник, выход которого соединен с первым входом перестраиваемого фильтра, причем выход перестраиваемого фильтра соединен с инвертирующим входом сумматора, контрольный приемник соединен с прямым входом сумматора, а выход сумматора параллельно соединен со вторым входом перестраиваемого фильтра, отличающийся тем, что опорный приемник выполнен в виде датчика времени цикла работы роторного механизма, а синтезатор гармоник выполнен в виде генератора импульсов с периодом времени цикла работы роторного механизма.
| АДАПТИВНЫЙ КОМПЕНСАТОР ПОМЕХ | 1994 |
|
RU2115233C1 |
| Устройство для вибродиагностики | 1990 |
|
SU1781556A1 |
| Устройство для виброакустической диагностики двигателей | 1976 |
|
SU714207A1 |
| US 9654158 B2, 16.05.2017. | |||

