Изобретение относится к радиотехнике и связи и может быть использовано при построении управляемых генераторов.
Известен генератор [1 (с.192 - рис.4-6. «Электронный генератор с ограничением амплитуды колебаний»)], содержащий два интегратора, сумматор, нелинейный элемент и два пассивных управляемых делителя, осуществляющих умножение сигналов на определенную величину.
Существенными недостатками генератора являются значительные искажения генерируемых колебаний, изменение амплитуды колебаний при перестройке частоты, длительный переходный процесс, сравнительно ограниченный диапазон частот, а также наличие механически перестраиваемых элементов для управления частотой выходных колебаний.
Введение дополнительного усилителя [1 (с.200 - рис.4-13.)] или дополнительного делителя в цепь ограничения [1 (с.200 - рис.4-14.)] улучшает переходный процесс, но коэффициент гармоник при этом остается на достаточно высоком уровне (1-2%). Недостатком подобных генераторов является также необходимость введения дополнительного делителя, сблокированного с делителями, служащими для перестройки частоты колебаний.
Известен генератор [1 (с.202 - рис.4-16. «Электронный генератор с ограничением амплитуды колебаний»)], содержащий два интегратора, сумматор, нелинейный элемент (с релейной характеристикой) и два пассивных управляемых делителя, осуществляющих перестройку выходных колебаний по частоте. На выходе нелинейного элемента формируются биполярные импульсы прямоугольной формы с высоким содержанием высших нечетных гармоник. Амплитуды An высших гармонических такого сигнала медленно убывают с увеличением номера гармоники An=A1/n, где A1 - амплитуда первой гармоники; n=3, 5, 7, … - номера высших гармоник. Биполярный прямоугольный сигнал подается по цепи обратной связи непосредственно на вход сумматора, поэтому на выходе первого интегратора будет сформирован сигнал, имеющий значительные нелинейные искажения.
Наиболее близким устройством к заявленному изобретению по совокупности существенных признаков является принятый за прототип управляемый генератор [2 (с.17 - рис.1-9.)], который содержит два интегратора, два перемножителя, нелинейный элемент и сумматор, к выходу которого подключен первый перемножитель, управляющий вход которого соединен с управляющей шиной и управляющим входом второго перемножителя, между выходом которого и первым входом сумматора включен второй интегратор, выход которого соединен со вторым выходом управляемого генератора, первый выход которого подключен к выходу первого интегратора, при этом нелинейный элемент включен между первым выходом управляемого генератора и вторым входом сумматора, а вход второго перемножителя подключен к выходу первого интегратора.
Для стабилизации амплитуды используется нелинейный элемент, при этом коэффициент гармоник и стабильность амплитуды связаны обратной зависимостью, то есть уменьшение коэффициента гармоник за счет уменьшения степени нелинейности приводит к снижению стабильности амплитуды и, напротив, увеличение стабильности амплитуды ведет к увеличению гармоник в выходном сигнале. Сравнительно невысокие метрологические характеристики (стабильность амплитуды 1-2% при коэффициенте гармоник 0,5-1%) ограничивают применение таких генераторов [2 (с.19)].
Задачей, на решение которой направлено изобретение, является уменьшение нелинейных искажений и асимметрии выходных сигналов, улучшение динамических характеристик управляемого генератора при переключениях генератора с одной частоты на другую, а также в пусковом режиме.
Указанный технический результат при осуществлении изобретения достигается тем, что в управляемый генератор, содержащий два перемножителя, два интегратора, нелинейный элемент и сумматор, при этом выход первого интегратора соединен с первым входом второго перемножителя, входом нелинейного элемента и первым выходом управляемого генератора, выход второго интегратора соединен со вторым выходом управляемого генератора и вторым входом сумматора, к выходу которого подключен первый вход первого перемножителя, второй вход которого соединен с управляющей шиной управляемого генератора и вторым входом второго перемножителя, причем выходы первого и второго перемножителей соединены, соответственно, с входами первого и второго интеграторов, введен блок управления, первый и второй входы которого соединены, соответственно, с первым и вторым выходами управляемого генератора, третий вход блока управления соединен с шиной опорного напряжения, а четвертый вход подключен к выходу нелинейного элемента, при этом выход блока управления соединен с первым входом сумматора.
Блок управления выполнен из трех квадраторов, сумматора, умножителя, ограничителя и инвертора, при этом первый, второй и третий входы сумматора соединены, соответственно, с выходами первого, второго квадраторов и с выходом инвертора, вход которого соединен с выходом третьего квадратора, причем первый, второй и третий входы блока управления соединены, соответственно, с входами первого, второго и третьего квадраторов, четвертый вход блока управления соединен со вторым входом перемножителя, первый вход которого соединен с выходом сумматора, между выходом которого и выходом блока управления включен ограничитель.
Блок управления выполнен из двух квадраторов, двух сумматоров, блока извлечения квадратного корня, перемножителя и ограничителя, при этом первый и второй входы блока управления соединены, соответственно, с входами первого и второго квадраторов, третий вход управляемого генератора соединен со вторым входом второго сумматора, четвертый вход управляемого генератора соединен с вторым входом перемножителя, между выходом которого и выходом блока управления включен ограничитель, причем выходы первого и второго квадраторов соединены, соответственно, с первым и вторым входами первого сумматора, между выходом которого и первым входом второго сумматора включен блок извлечения квадратного корня.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения. Следовательно, заявленное изобретение соответствует условию «новизна».
Введение в предлагаемый управляемый генератор блока управления позволило уменьшить нелинейные искажения и асимметрию выходных сигналов, улучшить динамические характеристики управляемого генератора при переключениях генератора с одной частоты на другую, а также в пусковом режиме.
Изобретение поясняется структурными схемами управляемого генератора (фиг.1, фиг.2) и графиками (фиг.3-11), поясняющими принцип работы управляемого генератора.
Управляемый генератор содержит два перемножителя 1, 2, два интегратора 3, 4, нелинейный элемент 5, сумматор 6 и блок управления 7, при этом выход первого интегратора 3 соединен с первым входом второго перемножителя 2, входом нелинейного элемента 5, первым входом блока управления 7 и первым выходом управляемого генератора, выход второго интегратора 4 соединен со вторым выходом управляемого генератора, вторым входом блока управления 7 и вторым входом сумматора 6, к выходу которого подключен первый вход первого перемножителя 1, второй вход которого соединен с управляющей шиной управляемого генератора и вторым входом второго перемножителя 2, причем выходы первого 1 и второго 2 перемножителей соединены, соответственно, с входами первого 3 и второго 4 интеграторов, третий и четвертый входы блока управления 7 соединены, соответственно, с выходом нелинейного элемента 5 и шиной опорного напряжения, а выход блока управления 7 соединен с первым входом сумматора 6.
Блок управления 7 может быть выполнен из трех квадраторов 8-10, сумматора 11, умножителя 12, ограничителя 13 и инвертора 14, при этом первый, второй и третий входы сумматора 11 соединены, соответственно, с выходами первого 8, второго 9 квадраторов и с выходом инвертора 14, вход которого соединен с выходом третьего квадратора 10, причем первый, второй, и третий входы блока управления 7 соединены, соответственно, с входами первого 8, второго 9 и третьего 10 квадраторов, четвертый вход блока управления 7 соединен со вторым входом перемножителя 12, первый вход которого соединен с выходом сумматора 11, между выходом которого и выходом блока управления включен ограничитель 13.
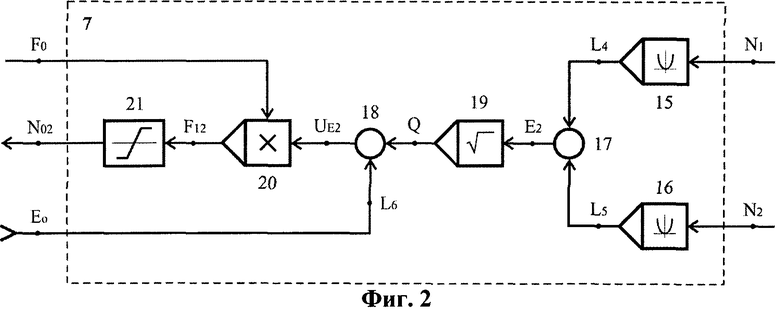
Блок управления 7 может быть выполнен из двух квадраторов 15, 16, двух сумматоров 17, 18, блока извлечения квадратного корня 19, перемножителя 20 и ограничителя 21, при этом первый и второй входы блока управления 7 соединены, соответственно, с входами первого 15 и второго 16 квадраторов, третий вход управляемого генератора 7 соединен со вторым входом второго сумматора 18, четвертый вход управляемого генератора 7 соединен с вторым входом перемножителя 20, между выходом которого и выходом блока управления включен ограничитель 21, причем выходы первого 15 и второго 16 квадраторов соединены, соответственно, с первым и вторым входами первого сумматора 17, между выходом которого и первым входом второго сумматора 18 включен блок извлечения квадратного корня 19.
Управляемый генератор работает следующим образом. Последовательно соединенные и замкнутые в кольцо перемножители 1 и 2, интеграторы 3 и 4 и сумматор 5 образуют колебательную систему (фиг.1), имеющую два выхода N1 и N2, поэтому найдем передаточную функцию по первому W1(s) и второму W2(s) выходу при воздействии входного сигнала (сигнала обратной связи) N0 на колебательную систему.
Перемножитель 1 и инвертирующий интегратор 3 образуют первый управляемый интегратор с передаточной функцией

где τi - постоянная времени интегратора 3;
τУ1=τ1/(m1·EУ) - постоянная времени первого управляемого интегратора;
m1 - масштабный коэффициент перемножителя 1;
EУ - управляющее напряжение;
s - комплексная переменная.
Перемножитель 2 и инвертирующий интегратор 4 образуют второй управляемый интегратор с передаточной функцией

где τ2 - постоянная времени интегратора 4;
τУ2=τ2/(m2·EУ) - постоянная времени второго управляемого интегратора;
m2 - масштабный коэффициент перемножителя 2.
Передаточная функция разомкнутой колебательной системы

При m1=m2=m и τ1=τ2=τ передаточные функции первого и второго управляемых интеграторов

при этом передаточная функция разомкнутой колебательной системы примет вид

Найдем передаточную функцию W2(s) замкнутой колебательной системы, на вход которой, то есть на первый вход инвертирующего сумматора 6, поступает сигнал N0(s), а выходным сигналом служит сигнал N2(s)

где H0(s) - передаточная функция разомкнутой колебательной системы;
k1 и k2 - коэффициенты передачи сумматора 6 по первому и второму входу.
При k2=1 передаточная функция принимает вид консервативного звена

Передаточная функция (7) описывает поведение идеального консервативного звена, в котором амплитуда выходных колебаний зависит от начальных условий, а сами колебания не затухают во времени, то есть такое звено является идеализированным.
Передаточная функция реального интегратора HRI(s)=-1/(τУ·s+1) отличается от передаточной функции идеального интегратора HII(s)=-1/(τУ·s) наличием дополнительного слагаемого в знаменателе, что придает такому звену свойства фильтра нижних частот (инерционное звено первого порядка). При выполнении условия τУ·s>>1 передаточная функция реального интегратора практически не будет отличаться от передаточной функции идеального интегратора HRI(s)≈-1/(τУ·s), поэтому колебательную систему генератора можно считать квазиконсервативной.
Передаточная функция W1(s) замкнутой колебательной системы, на вход которой, то есть на первый вход инвертирующего сумматора 6, поступает сигнал N0(s), а выходным сигналом служит сигнал N1(s)

представляет собой последовательное соединение консервативного и дифференцирующего звеньев.
Подставив значение комплексной переменной s=jω в уравнения (7) и (8) найдем комплексные частотные функции


Из (9) и (10) следует, что фазовый сдвиг между выходными колебаниями N1(t) и N2(t) будет определяться сомножителем (jω·τУ) и при любых изменениях частоты ω и постоянной времени τУ будет неизменным и составлять 90 электрических градусов

где φ(ω) - фазовый сдвиг между сигналами N2(t) и N1(t);
φ2(ω) - фазовый сдвиг между сигналами N2(t) и N0(t);
φ1(ω) - фазовый сдвиг между сигналами N1(t) и N0(t).
Частоту собственных колебаний ω0 можно найти из характеристического уравнения, для чего знаменатель в уравнениях (9) и (10) следует приравнять нулю и найти корни этого уравнения

Частота колебаний ω0 в управляемом генераторе зависит от постоянной времени интеграторов 3 и 4 и управляющего напряжения EУ. Как следует из (12), частота колебаний f генератора изменяется прямо пропорционально изменению управляющего напряжения f=mEУ/(2π·τ).
Для стабилизации выходных колебаний N1(t) и N2(t) используются блок управления 7 и релейный элемент 5.
Блок управления 7 (фиг.1) содержит три квадратора 8-10, сумматор 11, перемножитель 12, ограничитель 13 и инвертор 14. Квадраторы 8-10 и сумматор 11 выполняют роль датчика напряжения и схемы сравнения.
Блок управления 7 (фиг.2) содержит два квадратора 15 и 16, два сумматора 17 и 18, блок извлечения квадратного корня 19, перемножитель 20 и ограничитель 21. Квадраторы 15 и 16, сумматор 17 и блок извлечения квадратного корня 19 выполняют роль датчика напряжения, а сумматор 18 - роль схемы сравнения.
Стабилизация выходных колебаний происходит следующим образом.
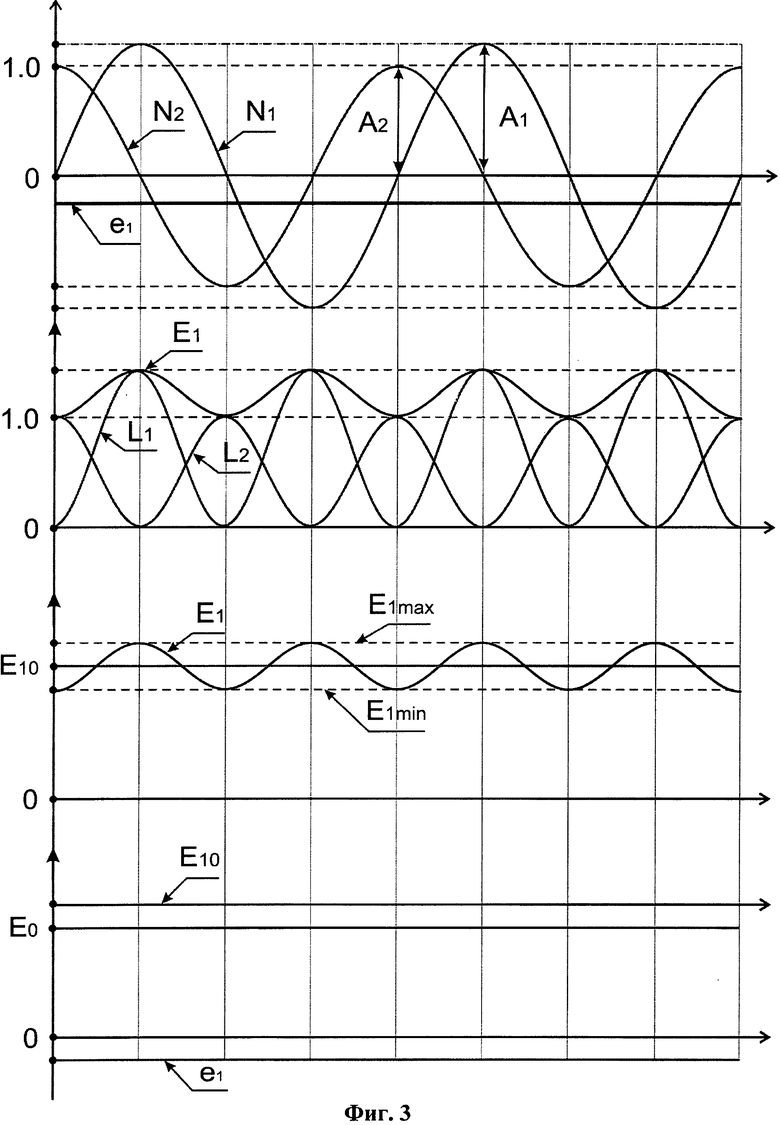
При подаче на первый вход блока управления 7 (фиг.1) гармонического сигнала N1(t)=A1 sin(ωt) на выходе квадратора 8 формируется сигнал L1 (фиг.3)

где A1 - амплитудное значение сигнала N1(t); k3 - коэффициент передачи сумматора 11 по первому входу; m3 - масштабный коэффициент третьего квадратора 8; x=ωt - текущее значение угла, выраженное в радианах.
При подаче на второй вход блока управления 7 (фиг.1) гармонического сигнала N2(t)=A2 cos(ωt) на выходе квадратора 9 формируется сигнал L2 (фиг.3)

где A2 - амплитудное значение сигнала N2(t); k4 - коэффициент передачи сумматора 11 по второму входу; m4 - масштабный коэффициент четвертого квадратора 9.
В результате суммирования сигналов L1 и L2 образуется напряжение E1 (фиг.3)

При выполнении условий k3=k4=1 и m3=m4=1 выражение (15) упрощается

Подставив значения sin2x=[1-cos(2x)]/2 и cos2x=[1+cos(2x)]/2 в уравнение (16), получим

где 

При равенстве амплитудных значений A1=A2=А значение E10=А, а переменная составляющая будет отсутствовать E1m=0. Фаза переменной составляющей для случая A2<A1 будет отличаться на 180 электрических градусов для случая A2>A1.
При A1>A2 (фиг.3) максимальное E1max и минимальное E1min значения сигнала E1 будут определяться соотношениями


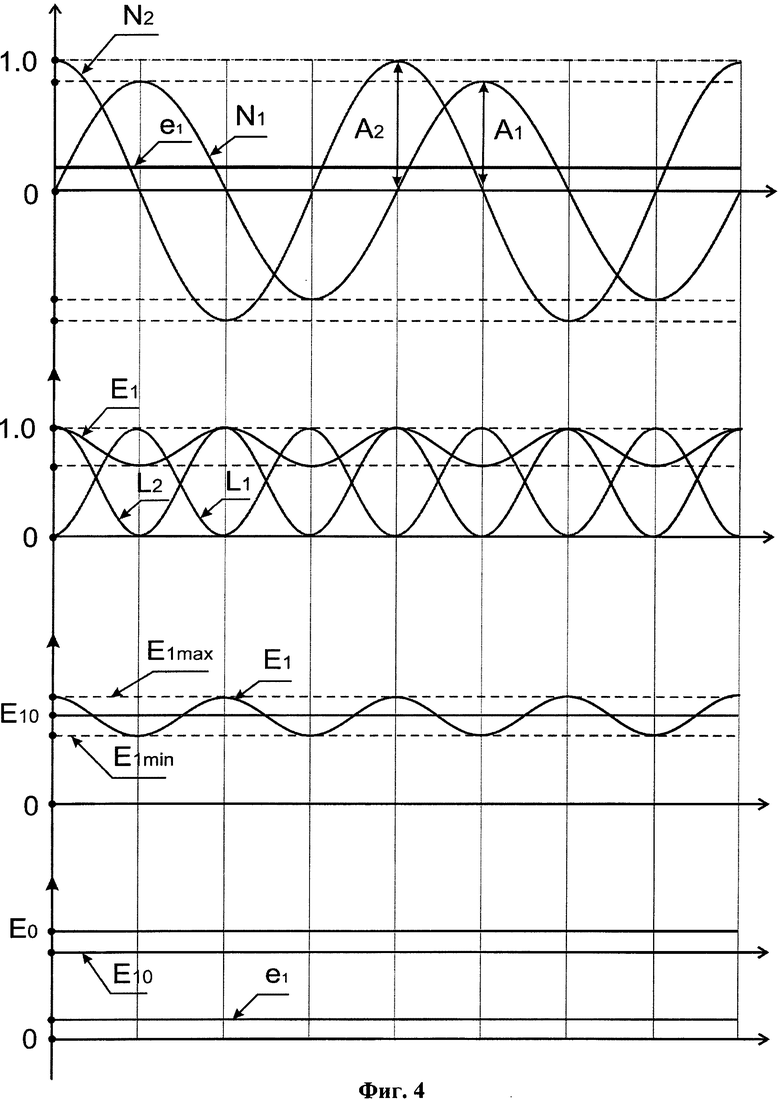
При A2>A1 (фиг.4) максимальное E1max и минимальное E1min значения сигнала E1 будут определяться соотношениями


При любых соотношениях A1 и A2 наибольшее значение E1max определяется наибольшим из них, а наименьшее значение E1min - наименьшим из A1 и A2.
На третий вход сумматора 11 поступает сигнал

где k5 - коэффициент передачи сумматора 11 по третьему входу; m5 - масштабный коэффициент пятого квадратора 10; E0 - величина опорного напряжения. Положив k5m5=1, получим 
В результате суммирования трех сигналов L1, L2 и L3 на выходе инвертирующего сумматора 11 образуется напряжение (напряжение рассогласования)

Приведем уравнение (23) к нормированному виду, для чего левую и правую части этого уравнения разделим на 

где α=A1/E0 и β=A2/E0 - коэффициенты, определяющие отношение амплитудных значений A1 и A2 выходных сигналов N1(t) и N2(t) к величине опорного сигнала E0.
Перепишем уравнение (24)

где 

При A1=A2=E0 напряжение 
В реальной системе под действием различных дестабилизирующих факторов могут произойти отклонения амплитудных значений A1 и A2 сигналов N1(t) и N2(t) в большую или меньшую сторону от заданного значения E0.
Из (24) следует, что при возрастании амплитуды A1 или A2 значение постоянной составляющей 

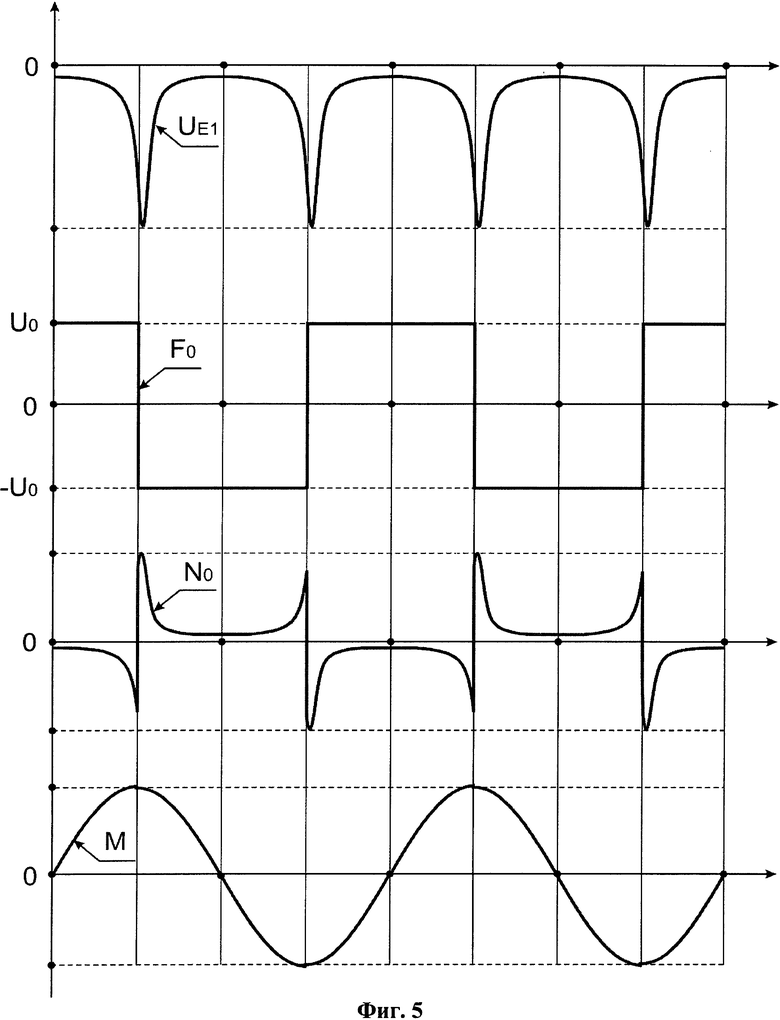
Нелинейный элемент 5, выполненный из усилителя-ограничителя, имеет релейную характеристику (фиг.5) с фиксированным порогом ограничения U0, поэтому на его выходе формируется биполярный сигнал F0 прямоугольной формы.
На первый вход сумматора 6, то есть на вход колебательного звена, с выхода блока управления 7 поступает сигнал

где m10 - масштабный множитель перемножителя 12;
U0 - напряжение ограничения нелинейного элемента 5;
UE1 - напряжение рассогласования (сигнал ошибки) между заданным значением амплитуды E0 и реальными значениями A1 и A2.
Величина порогового напряжения U0 значительно превышает напряжение рассогласования UE1, но при малой величине (единицы милливольт) напряжения рассогласования величина сигнала N0 остается незначительной (уравнение 26).
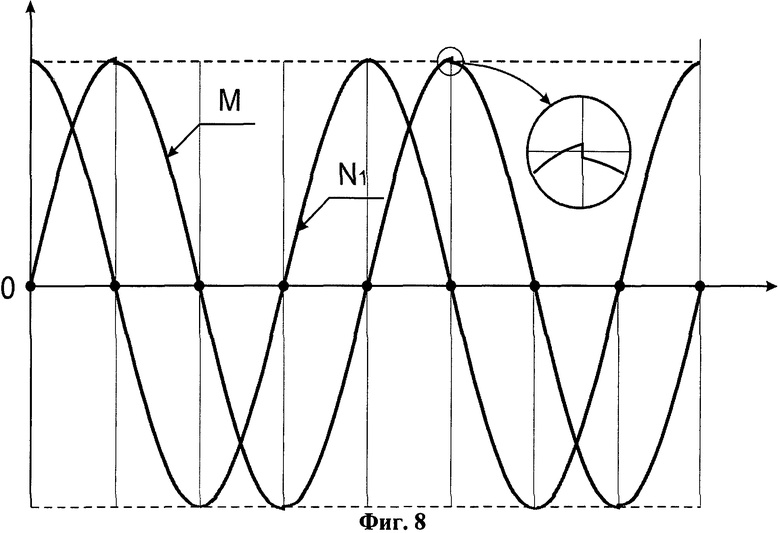
На второй вход сумматора 6 по цепи обратной связи подается сигнал N2(t). В результате суммирования двух сигналов N0 и N2 на выходе сумматора формируется (фиг.5) сигнал M(t)=-[k1·N0(t)+k2·N2(t)], незначительно отличающийся по форме от сигнала N2(t).
Таким образом, уменьшение (увеличение) сигнала UE1 приведет к увеличению (уменьшению) сигнала N0 и, как следствие, к уменьшению (увеличению) сигнала М, поступающего на вход первого управляемого интегратора. Наличие отрицательной обратной связи приведет к восстановлению прежних значений сигналов N1(t) и N2(t), которые будут отличаться от заданного значения E0 на величину ошибки регулирования. Наличие интегрирующих (астатических) звеньев в замкнутой системе регулирования сводит ошибку регулирования, то есть величину сигнала рассогласования UE1, практически к нулю. Поскольку в датчике напряжения используются оба квадратурных сигнала N1(t) и N2(t), то асимметрия амплитуд A1 и A2 этих сигналов будет также определяться ошибкой регулирования, которая в астатической системе практически равна нулю.
При работе управляемого генератора с блоком управления 7 (фиг.2) стабилизация амплитуды осуществляется следующим образом.
При подаче на первый вход блока управления 7 (фиг.2) гармонического сигнала N1(t)=A1 sin(ωt) на выходе квадратора 15 формируется (фиг.6) сигнал

где A1 - амплитудное значение сигнала N1(t); k6 - коэффициент передачи сумматора 17 по первому входу; m6 - масштабный коэффициент квадратора 17; x=ωt - текущее значение угла, выраженное в радианах.
При подаче на второй вход блока управления 7 (фиг.2) гармонического сигнала N2(t)=A2 cos(ωt) на выходе квадратора 16 формируется (фиг.6) сигнал

где A2 - амплитудное значение сигнала N2(t); k7 - коэффициент передачи сумматора 17 по второму входу; m7 - масштабный коэффициент квадратора 16.
В результате суммирования сигналов L1 и L2 образуется (фиг.6) напряжение

При выполнении условий k6=k7=1 и m6=m7=1 выражение (29) упрощается

Подставив значения sin2x=[1-cos(2x)]/2 и cos2x=[1+cos(2x)]/2 в уравнение (30), получим

где 

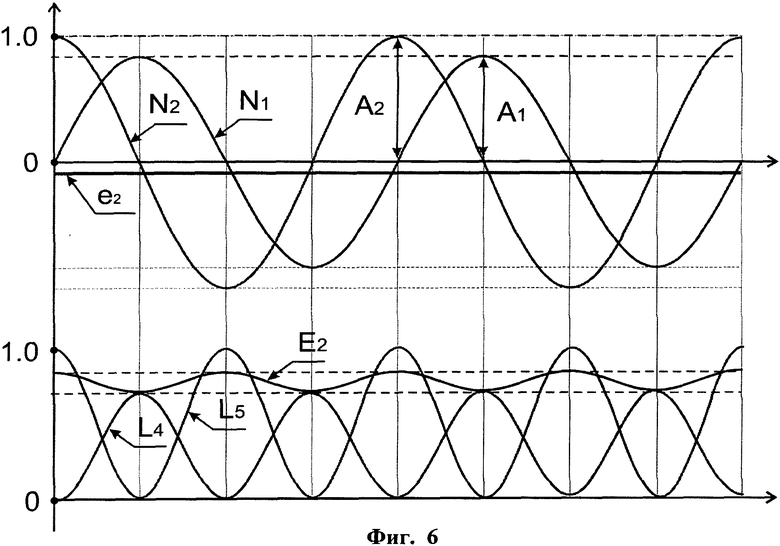
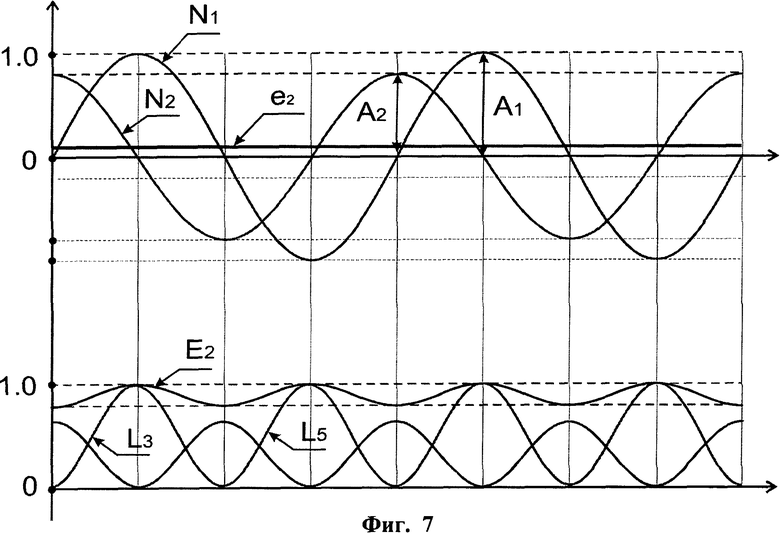
При равенстве амплитудных значений A1=A2=A значение E20=A, а переменная составляющая будет отсутствовать E2m=0. Фаза переменной составляющей для случая A2>A1 (фиг.6) будет отличаться на 180 электрических градусов для случая A2<A1 (фиг.7).
При A2>A1 (фиг.6) максимальное E2max и минимальное E2min значения сигнала E2 будут определяться соотношениями


При A1>A2 (фиг.7) максимальное E1max и минимальное E1min значения сигнала E1 будут определяться соотношениями


При любых соотношениях A1 и A2 наибольшее значение E2max определяется наибольшим из них, а наименьшее значение E2min - наименьшим из A1 и A2.
На выходе блока извлечения квадратного корня 19 сигнал

где m8 - масштабный коэффициент блока извлечения квадратного корня 19.
На первый вход сумматора 18 подается напряжение Q, на второй вход опорное напряжение отрицательной полярности (-E0), в результате суммирования этих сигналов на выходе инвертирующего сумматора 18 образуется напряжение (напряжение рассогласования)

где k8 и k9 - коэффициенты передачи второго сумматора 18 по первому и второму входам.
При выполнении условий k8m8=1 и k9=1 выражение (39) упрощается

Приведем уравнение (21) к нормированному виду, для чего левую и правую части этого уравнения разделим на E0

где 

При A1=A2=E0 напряжение 
Из (39) следует, что при возрастании амплитуды A1 или A2 значение постоянной составляющей сигнала UE2 уменьшается, а при уменьшении амплитуды A1 или A2 значение UE2 увеличивается. Следовательно, в первом случае произойдет уменьшение, а во втором - увеличение сигнала UE2 на выходе сумматора 18.
Графики, поясняющие работу датчика напряжения и схемы сравнения при возрастании амплитуды A2, показаны на фиг.6, а при уменьшении амплитуды A2 - на фиг.7.
Увеличение (уменьшение) сигнала UE2 приведет к уменьшению (увеличению) сигнала N0=N02 и, как следствие, к уменьшению (увеличению) сигнала М, поступающего на вход первого управляемого интегратора. Наличие отрицательной обратной связи приведет к восстановлению прежних значений сигналов N1(t) и N2(t), которые будут отличаться от заданного значения E0 на величину ошибки регулирования.
Наличие интегрирующих (астатических) звеньев в замкнутой системе регулирования сводит ошибку регулирования, то есть величину сигнала рассогласования UE2, практически к нулю.
Оценка нелинейных искажений выходных сигналов генератора проводилась на математической модели в программе PSIM-9.03. Выходной сигнал F0 наряду с первой гармоникой содержит нечетные высшие гармонические составляющие, амплитуды которых медленно уменьшаются с увеличением номера гармоник AFn=1/n, где n - номер гармоники сигнала F0.
Подача сигнала по цепи обратной связи непосредственно на вход колебательной системы, то есть на вход сумматора 6, приводит к значительным искажениям сигнала N1(t) на выходе первого интегратора, поскольку высшие гармонические сигнала, имеющие значительные амплитуды, пройдя через интегратор 3, ослабевают в недостаточной степени. Подобные значительные искажения присущи всем генераторам с релейным элементом [1, 2].
С целью уменьшения искажений выходных сигналов N1(t) и N2(t) выходной сигнал F0 релейного элемента 5 подается на четвертый вход блока управления 7, то есть на второй вход перемножителя 12, на первый вход которого поступает сигнал рассогласования UE1 с выхода сумматора 11. При перемножении сигналов F0 и UE1 на выходе перемножителя 12 формируется сигнал F11, поступающий на вход ограничителя 13. Ограничитель вступает в работу только при запуске генератора, поэтому в установившихся режимах выходной сигнал N01 на выходе ограничителя 13 будет в точности повторять форму сигнала F11 на его входе.
В результате суммирования двух сигналов N0 и N2 на выходе сумматора формируется (фиг.8) сигнал M(t)], незначительно отличающийся по форме от сигнала N2(t).
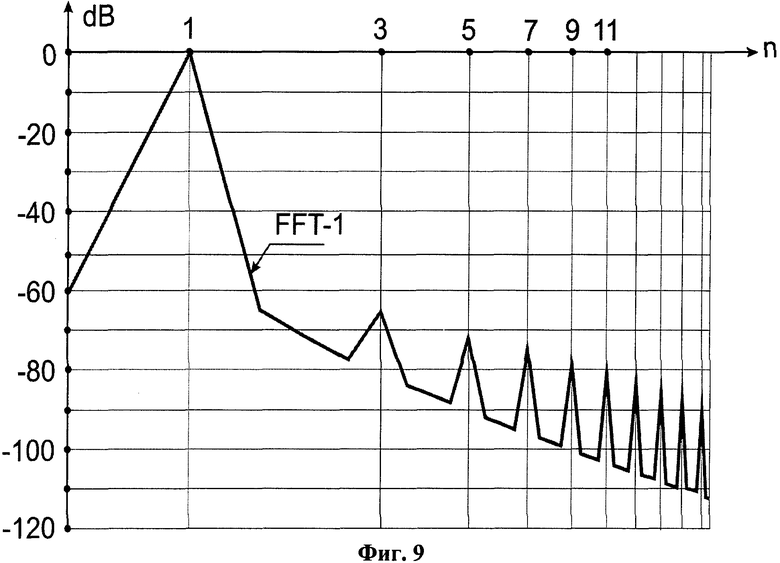
С помощью блока FFT (Fast Fourier Transform - Быстрые преобразования Фурье) получена осциллограмма (фиг.9) распределения спектральных составляющих выходного сигнала N1(t) с нормированным амплитудным значением 1 В. Результаты измерений приведены в табл.1.
Коэффициент нелинейных искажений сигнала (Kн), величина, выражающая степень нелинейных искажений сигнала, равная отношению среднеквадратичного значения всех высших гармоник сигнала к напряжению первой гармоники, определялся по формуле

После подстановки табличных значений в формулу (40) получим

Коэффициент гармонических искажений (Kг), величина для количественной оценки нелинейных искажений, равная отношению среднеквадратичного значения всех высших гармоник сигнала, к среднеквадратичному значению спектральных компонентов всего сигнала кроме постоянной составляющей, определялся по формуле

После подстановки табличных значений в формулу (41) получим

Результаты расчетов проверены с помощью блока (THD - Total harmonic distortion) программы PSIM. Хорошее совпадение результатов (KН≈0,058%) говорит о достаточности пяти высших гармоник при оценке нелинейных искажений сигнала.
При работе генератора с блоком управления 7 (фиг.2) результаты измерений распределения спектральных составляющих выходного сигнала N1(t) с нормированным амплитудным значением 1 В сведены в табл.2.

Таким образом, коэффициент нелинейных искажений при работе генератора с блоком управления 7 (фиг.2) не превысил 0,05%.
На втором выходе управляемого генератора искажения сигнала N2(t) будут еще меньше из-за фильтрующего свойства второго интегратора 4. Незначительное содержание высших гармоник выходных сигналов N1(t) и N2(t) является достоинством предлагаемого генератора.
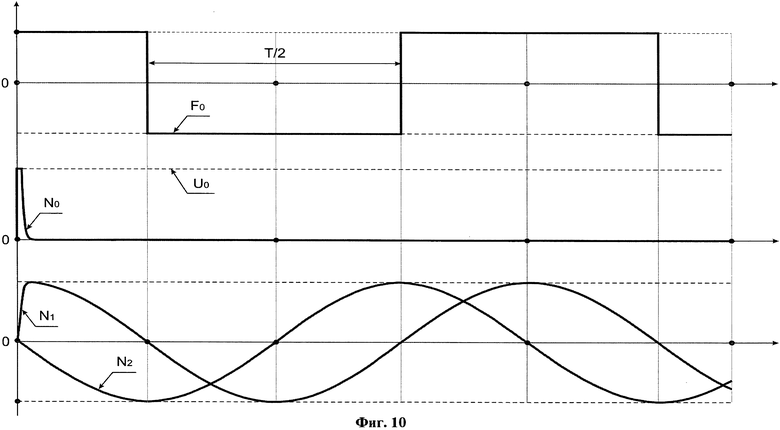
Ограничители 13 (фиг.1) и 21 (фиг.2) необходимы для исключения кратковременных выбросов сигналов F11 и F12, возникающих во время запуска управляемого генератора, то есть в тот момент, когда напряжение источника опорного напряжения E0 уже есть, а выходные сигналы N1(t) и N2(t) еще не достигли своих установившихся значений (фиг.10). В том случае, если допустимо ограничение сигналов F11 и F12, на уровне источников питания операционных усилителей, то ограничители 13 и 21 могут отсутствовать.
Величина кратковременного выброса сигнала F11 (F12), возникающего во время запуска управляемого генератора, способствует значительному повышению быстродействия управляемого генератора (фиг.10), поэтому величину этого выброса следует ограничивать на максимально возможном уровне.
Незначительное время переходного процесса во время запуска генератора является достоинством предлагаемого решения.
Квадратор 10 (фиг.1) и блок извлечения квадратного корня 19 (фиг.2) обеспечивают линейную зависимость между амплитудами A1 и A2 формируемых сигналов N1(t) и N2(t) и источником опорного напряжения E0.
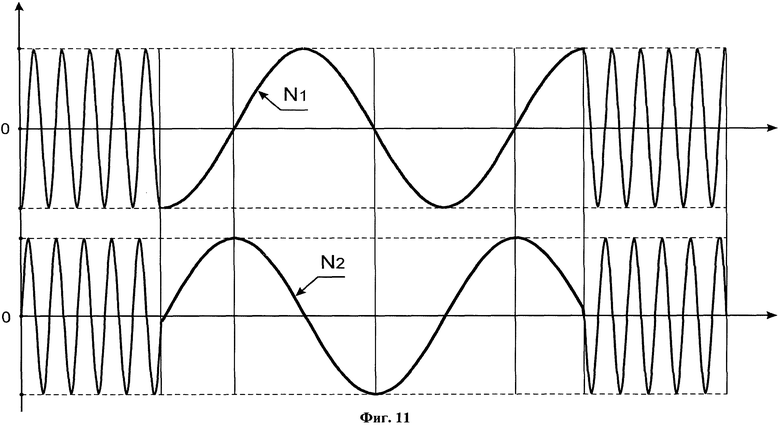
Динамика (переходные процессы), то есть время установления амплитуд A1 и A2 гармонических сигналов N1(t) и N2(t) при скачкообразном изменении управляющего напряжения (при переходе с низкой частоты fН на более высокую частоту fВ и обратно с частоты fВ на частоту fН), представлена на фиг.11.
При изменении частоты на одну декаду (10 раз) переход с одной частоты на другую осуществляется практически без переходного процесса, что является достоинством предлагаемого генератора.
Использование предлагаемого изобретения позволит уменьшить нелинейные искажения и асимметрию выходных сигналов, улучшить динамические характеристики управляемого генератора при переключениях с одной частоты на другую, а также в пусковом режиме.
Источники информации
1. Вавилов А.А., Солодовников А.И. Экспериментальное определение частотных характеристик автоматических систем. М. - Л.: Госэнергоиздат, 1963 г. - 252 с.
2. Вавилов А.А., Солодовников А.И., Шнайдер В.В. Низкочастотные измерительные генераторы. - Л.: Энергоатомиздат, Ленингр. отд-ние, 1985 г. - 104 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР КВАДРАТУРНЫХ СИГНАЛОВ | 2014 |
|
RU2551824C1 |
| ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР | 2013 |
|
RU2541147C1 |
| ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР | 2015 |
|
RU2582557C1 |
| МНОГОЧАСТОТНЫЙ ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР | 2013 |
|
RU2534938C1 |
| ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР КВАДРАТУРНЫХ СИГНАЛОВ | 2015 |
|
RU2582556C1 |
| Функциональный генератор | 2016 |
|
RU2625555C1 |
| ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР | 2013 |
|
RU2534939C1 |
| Генератор ортогональных сигналов | 1990 |
|
SU1702514A1 |
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР КВАДРАТУРНЫХ СИГНАЛОВ | 2014 |
|
RU2565362C1 |
| ФОРМИРОВАТЕЛЬ ГАРМОНИЧЕСКОГО СИГНАЛА | 2015 |
|
RU2577205C1 |
Изобретение относится к радиотехнике и связи и может быть использовано при построении управляемых генераторов. Достигаемый технический результат - уменьшение нелинейных искажений и асимметрии выходных сигналов. Управляемый генератор содержит два перемножителя, два интегратора, нелинейный элемент и сумматор, при этом выход первого интегратора соединен с первым входом второго перемножителя, входом нелинейного элемента и первым выходом управляемого генератора, выход второго интегратора соединен со вторым выходом управляемого генератора и вторым входом сумматора, к выходу которого подключен первый вход первого перемножителя, второй вход которого соединен с управляющей шиной управляемого генератора и вторым входом второго перемножителя, причем выходы первого и второго перемножителей соединены, соответственно, с входами первого и второго интеграторов, а также блок управления, первый и второй входы которого соединены, соответственно, с первым и вторым выходами управляемого генератора, третий вход блока управления соединен с шиной опорного напряжения, а четвертый вход подключен к выходу нелинейного элемента, при этом выход блока управления соединен с первым входом сумматора. 2 з.п. ф-лы, 11 ил., 2 табл.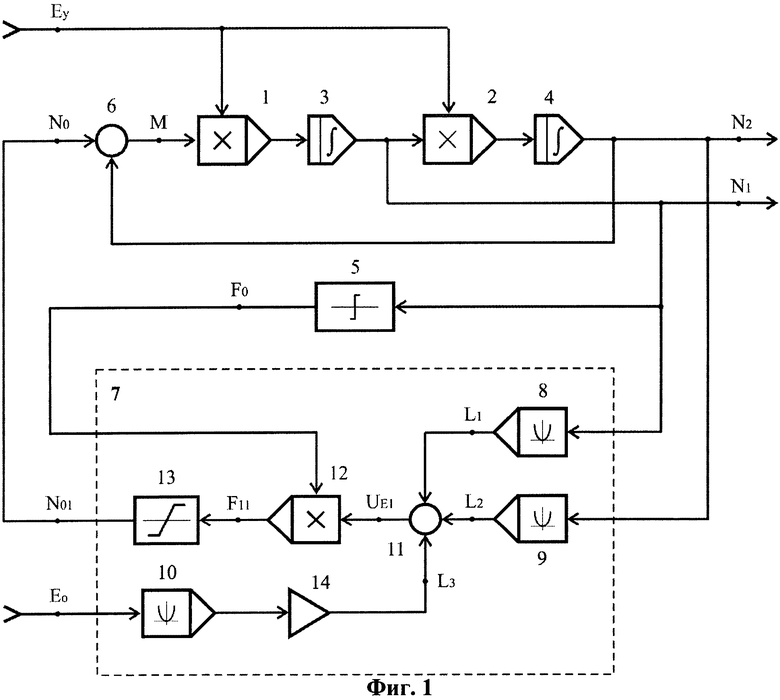
1. Управляемый генератор, содержащий два перемножителя, два интегратора, нелинейный элемент и сумматор, при этом выход первого интегратора соединен с первым входом второго перемножителя, входом нелинейного элемента и первым выходом управляемого генератора, выход второго интегратора соединен со вторым выходом управляемого генератора и вторым входом сумматора, к выходу которого подключен первый вход первого перемножителя, второй вход которого соединен с управляющей шиной управляемого генератора и вторым входом второго перемножителя, причем выходы первого и второго перемножителей соединены, соответственно, с входами первого и второго интеграторов, отличающийся тем, что в него введен блок управления, первый и второй входы которого соединены, соответственно, с первым и вторым выходами управляемого генератора, третий вход блока управления соединен с шиной опорного напряжения, а четвертый вход подключен к выходу нелинейного элемента, при этом выход блока управления соединен с первым входом сумматора.
2. Генератор по п.1, отличающийся тем, что блок управления выполнен из трех квадраторов, сумматора, умножителя, ограничителя и инвертора, при этом первый, второй и третий входы сумматора соединены, соответственно, с выходами первого, второго квадраторов и с выходом инвертора, вход которого соединен с выходом третьего квадратора, причем первый, второй и третий входы блока управления соединены соответственно с входами первого, второго и третьего квадраторов, четвертый вход блока управления соединен со вторым входом перемножителя, первый вход которого соединен с выходом сумматора, между выходом которого и выходом блока управления включен ограничитель.
3. Генератор по п.1, отличающийся тем, что блок управления выполнен из двух квадраторов, двух сумматоров, блока извлечения квадратного корня, перемножителя и ограничителя, при этом первый и второй входы блока управления соединены соответственно с входами первого и второго квадраторов, третий вход управляемого генератора соединен со вторым входом второго сумматора, четвертый вход управляемого генератора соединен с вторым входом перемножителя, между выходом которого и выходом блока управления включен ограничитель, причем выходы первого и второго квадраторов соединены соответственно с первым и вторым входами первого сумматора, между выходом которого и первым входом второго сумматора включен блок извлечения квадратного корня.
| Генератор ортогональных сигналов | 1990 |
|
SU1702514A1 |
| Устройство стабилизации амплитуды колебаний автогенератора | 1989 |
|
SU1739499A1 |
| КОЛЬЦЕВОЙ СЧЕТЧИК | 1989 |
|
SU1612946A1 |
| Клапанное запорное устройство | 1988 |
|
SU1657815A1 |

