Изобретение относится к средствам военной техники и может быть использовано в конструкции автономных винтокрылых модулей вооружения, имеющих два соосных двухлопастных несущих винта (ДНВ), хвостовое оперение типа чайка и свободные силовые турбины в гондолах, размещенных в фюзеляже за крылом, приводящие ДНВ и в кольцевых обтекателях выносные вентиляторы, создающие при вертикальном и коротком взлете/посадке (ВВП и КВП) пропульсивно-реактивную тягу, направленную горизонтально назад с работающими/авторотирующими ДНВ или зафиксированными их лопастями-крыльями наружу от оси симметрии или после его посадки и складывания консолей крыла и лопастей-крыльев ДНВ по оси симметрии в походную конфигурацию - перевозки по земле в грузовом отсеке на ложементе машины разведки и управления в составе противотанковых ракетных комплексов.
Известен самолет вертикального взлета и посадки модели (СВВП) DO.31 компании Dornier (ФРГ), имеющий высокорасположенное крыло, на концах которого смонтированы гондолы с подъемными турбореактивными двухконтурными двигателями (ТРДД), создающими вертикальную тягу наравне с подкрыльными подъемно-маршевыми ТРДД, имеющими отклоняемые вниз-вверх боковые поворотные сопла, изменяющие вектор реактивной тяги каждого ТРДД, хвостовое крестообразное оперение.
Признаки, совпадающие - комбинированная силовая установка имеет восемь подъемных ТРДД мод. RB. 162-4 тягой по 2000 кгс и два подъемно-маршевых ТРДД компании Бристоль Сиддли мод. BS.53 "Пегас" 5-2 с тягой по 7000 кгс, установленных в гондолах под крылом. Гондолы ТРДД имеют с каждой их стороны по две пары поворотных сопла с управляемым вектором тяги, которые поворачиваются в вертикальной плоскости для направления выходящей из ТРДД струи газов назад параллельно оси СВВП при горизонтальном полете или вниз при выполнении ВВП.
Причины, препятствующие поставленной задаче: первая - это то, что подкрыльное расположение ТРДД с их боковыми соплами, изменяющими вектор реактивной их тяги, предопределяет наличие с каждой стороны гондолы их обтекателей и сложной системы синхронного отклонения вниз-вверх потока струи газов каждого ТРДД, что усложняет конструкцию. Вторая - это то, что для выполнения ВВП и зависания имеется двойная раздельная система создания вертикальной тяги и поперечно-продольной управляемости (подъемные ТРДД и боковые сопла ТРДД), что неизбежно ведет к утяжелению, увеличению объема регламентных работ и удорожанию эксплуатации, но и уменьшению весовой отдачи, так как при горизонтальном его полете сами подъемные ТРДД, увеличивая паразитную массу, бесполезны. Все это ограничивает возможность повышения скорости и дальности полета, но и целевой нагрузки (ЦН).
Известен противотанковый ракетный комплекс с воздушным модулем вооружения (патент RU 2470250 А1, 29.03.2012), включающий наземную боевую машину (бронетранспортер), содержащую средства базирования и управления воздушным модулем вооружения - беспилотный электрический вертолет двухвинтовой сосной схемы, оснащенный средствами целеуказания, комплексом вооружения, преимущественно средствами базирования противотанковых управляемых ракет, выполненный с возможностью базирования на наземной боевой машине и связан с ней кабелем связи.
Благодаря использованию беспилотного электрического вертолета (БПЭВ) в комплексе вооружений по указанному патенту RU 2470250 расширены возможности целеуказания, обеспечены дополнительные возможности для автономного ведения боевых действий, в том числе и ведения огня с хода, но при этом весьма ограничена дальность действии привязного БПЭВ и, как следствие, ограничение в дальности стрельбы. Кроме того, в материалах патента RU 2470250 не раскрыты средства, которые бы обеспечили надежное взаимодействие бронетранспортера и БПЭВ и, особенно, во время перезаряжания, а также возможность размещения БПЭВ с соосными винтами диаметром 4,5 м в бронетранспортере без системы складывании их лопастей.
Наиболее близким к предлагаемому изобретению является беспилотный авиационный комплекс израильской компании «IAI» (Israel AircraftIndustries) (патент WO 2007/141795 A1, 13.12.2007), включающий платформу, содержащую средства базирования со стартовой станцией, энергетическую установку и блок управления полетом беспилотной многовинтовой системой (БПМС) с силовой установкой (СУ).
Признаки, совпадающие - беспилотный авиационный комплекс включает также привязь, оперативно связывающую наземную платформу с БПМС, которая обеспечивает электрическую связь между БПМС и наземной платформой (НМ). Использование движителями СУ привязной БПМС внешнего источника энергии, установленного на НМ, а также невозможность совершать самостоятельный полет вне привязи к НМ - весьма ограничивают функциональные возможности беспилотного авиационного комплекса. В частности, высота подъема БПМС ограничена длиной привязи, которая продиктована, в том числе, массой входящего в нее кабеля. Кроме того, в материалах патента WO 2007/141795 не раскрыты средства, которые бы обеспечили надежное взаимодействие НМ и привязной БПМС с комплексом вооружения.
Предлагаемым изобретением решается задача в указанном выше известном беспилотном авиационном комплексе повышения скорости и дальности полета, увеличения взлетного веса и весовой отдачи, упрощения управления при зависании, обеспечения применения в составе мобильных и аэромобильных авиационных противотанковых ракетных комплексов и трансформация в походную конфигурацию для перевозки по земле в грузовом отсеке на ложементе машины разведки и управления.
Отличительными признаками предлагаемого изобретения от указанного выше известного беспилотного авиационного комплекса, наиболее близкого к нему, являются наличие того, что упомянутая БПМС представляет собой беспилотный ударный самолет-вертолет (БУСВ) с интегральной аэродинамической компоновкой, снабженный как фюзеляжем, носовая часть которого плавно сопряжена с вихре образующими передними наплывами, имеющими угол стреловидности и атаки отличными от крыла, увеличивающими на больших углах атаки несущую его способность, распространяющимися от передней кромки крыла и вдоль носовой части фюзеляжа к ее обтекателю, образуют в плане V-образную с округленной вершиной конфигурацию, так и по меньшей мере одним комбинированным газотурбинным двигателем (КГтД), который установлен в мотогондоле, смонтированной в фюзеляже за крылом, и выполнен в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с выносным однорядным вентилятором (ВОВ) в кольцевом обтекателе и по меньшей мере с одной свободной силовой турбиной (ССТ), снабженной передним выводом вала для отбора мощности и ее передачи через промежуточный редуктор на входной вал соосного редуктора, перераспределяющий взлетную мощность СУ между двухлопастными НВ (ДНВ) в симметрично-сбалансированной двухвинтовой соосно-несущей несущей системе (ДПНС-Х2) и ВОВ, имеющим лопатки с большой их круткой, работающим по тянущей схеме, установленным перед и соосно с промежуточным редуктором для создания в пропульсивно-реактивной системе (ПРС-R1 маршевой тяги, направленной параллельно оси симметрии при вертикальном и коротком взлете/посадке (ВВП и КВП) или горизонтальном поступательном полете, но и низко-расположенным стреловидным крылом (НСК), имеющим угол χ=+20° стреловидности по передней кромке, размах в  или
или  раза больше диметра (D) ДНВ, внутренние и внешние секции, образующие НСК типа обратная чайка, смонтированы с отрицательным (ϕвну) и положительным (ϕвне) углами поперечного V соответственно и выполненный с возможностью преобразования полетной его конфигурации после выполнения технологии короткого и вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или несущих их дупланных лопастей-крыльев (ДЛК), когда верхний и нижний ДНВ одновременно остановлены так, что при виде сверху их передняя и задняя лопасти как предварительно размещены перпендикулярно соответственно передней кромке левой и правой консолей НСК, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на угол 90° в горизонтальной плоскости наружу от оси симметрии лопастей-крыльев ДНВ так, что они фиксируются с прямой стреловидностью по передним кромкам ДЛК ДНВ, образуя с НСК равновеликую стреловидность χ=+20°, организующим синхронно-симметричные несущие поверхности их ДЛК относительно оси симметрии и зафиксированным в плане параллельно передней кромке НСК в полетной конфигурации реактивного самолета с ПРС-R1 и системой бипланных разноуровневых крыльев (СБРК), преобразующей большое удлинение НСК с λ=10,5-11,5 до умеренного удлинения λ=5,0-6,0 СБРК, имеющей зафиксированные наружу от оси симметрии верхние и нижние ДЛК ДНВ, размещенные при виде спереди соответственно над левой и правой консолями НСК, но и обратно, при этом в мотогондоле КГтД с кольцевым обтекателем ВОВ по меньшей мере одна ССТ имеет промежуточный редуктор, снабженный продольными по его оси как входным валом, так и выходными внешним и внутренним соосными валами, первый из которых передает мощность через муфту сцепления на ВОВ, а второй - продлен за ВОВ и передает через муфту сцепления крутящий момент на соосный редуктор ДНВ, колонка выходных вертикальных соосных валов которого размещена в плане над центром масс, отклонена назад по полету на угол (∠α), который равновелик или равен 1/2 величине угла (∠αвне) атаки внешней секции НСК, причем набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно соответственно передние кромки наступающих лопастей соосных ДНВ и зафиксированных соответствующим образом упомянутых их ДЛК, выполняющих над НСК в СБРК роль верхних разрезных крыльев с углом атаки ДЛК, который равновелик углу (∠α) отклонения назад колонки валов соосного редуктора двух ДНВ, при этом прямой стреловидности передняя кромка каждого бокового воздухозаборника КГтД как левого и правого размещена в плане параллельно соответственно передней кромке наплывов НСК, причем сопло ССТ и внешние борта двигательного отсека фюзеляжа размещены при виде сверху и спереди соответственно по оси симметрии и между отклоненными наружу от плоскости симметрии соответствующими секциями хвостового оперения типа чайка, внутренние и внешние стреловидные секции которого выполнены в виде килей и стабилизаторов, снабжены рулями направления и высоты соответственно.
раза больше диметра (D) ДНВ, внутренние и внешние секции, образующие НСК типа обратная чайка, смонтированы с отрицательным (ϕвну) и положительным (ϕвне) углами поперечного V соответственно и выполненный с возможностью преобразования полетной его конфигурации после выполнения технологии короткого и вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или несущих их дупланных лопастей-крыльев (ДЛК), когда верхний и нижний ДНВ одновременно остановлены так, что при виде сверху их передняя и задняя лопасти как предварительно размещены перпендикулярно соответственно передней кромке левой и правой консолей НСК, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на угол 90° в горизонтальной плоскости наружу от оси симметрии лопастей-крыльев ДНВ так, что они фиксируются с прямой стреловидностью по передним кромкам ДЛК ДНВ, образуя с НСК равновеликую стреловидность χ=+20°, организующим синхронно-симметричные несущие поверхности их ДЛК относительно оси симметрии и зафиксированным в плане параллельно передней кромке НСК в полетной конфигурации реактивного самолета с ПРС-R1 и системой бипланных разноуровневых крыльев (СБРК), преобразующей большое удлинение НСК с λ=10,5-11,5 до умеренного удлинения λ=5,0-6,0 СБРК, имеющей зафиксированные наружу от оси симметрии верхние и нижние ДЛК ДНВ, размещенные при виде спереди соответственно над левой и правой консолями НСК, но и обратно, при этом в мотогондоле КГтД с кольцевым обтекателем ВОВ по меньшей мере одна ССТ имеет промежуточный редуктор, снабженный продольными по его оси как входным валом, так и выходными внешним и внутренним соосными валами, первый из которых передает мощность через муфту сцепления на ВОВ, а второй - продлен за ВОВ и передает через муфту сцепления крутящий момент на соосный редуктор ДНВ, колонка выходных вертикальных соосных валов которого размещена в плане над центром масс, отклонена назад по полету на угол (∠α), который равновелик или равен 1/2 величине угла (∠αвне) атаки внешней секции НСК, причем набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно соответственно передние кромки наступающих лопастей соосных ДНВ и зафиксированных соответствующим образом упомянутых их ДЛК, выполняющих над НСК в СБРК роль верхних разрезных крыльев с углом атаки ДЛК, который равновелик углу (∠α) отклонения назад колонки валов соосного редуктора двух ДНВ, при этом прямой стреловидности передняя кромка каждого бокового воздухозаборника КГтД как левого и правого размещена в плане параллельно соответственно передней кромке наплывов НСК, причем сопло ССТ и внешние борта двигательного отсека фюзеляжа размещены при виде сверху и спереди соответственно по оси симметрии и между отклоненными наружу от плоскости симметрии соответствующими секциями хвостового оперения типа чайка, внутренние и внешние стреловидные секции которого выполнены в виде килей и стабилизаторов, снабжены рулями направления и высоты соответственно.
Кроме того, на режимах ВВП и зависания БУСВ упомянутая по меньшей мере одна его ССТ выполнена с элементами цифрового программного управления, сочетающего в двухрежимной системе регулирования и управления одновременный режим ее работы как при отборе 95% взлетной ее мощности на привод упомянутых ДНВ, так и при сбалансированном распределении 5% остаточной мощности на привод упомянутого ВОВ, создающего минимальную маршевую тягу для необходимого горизонтального поступательного полета, при этом для экономичного высокоскоростного горизонтального полета, достигая маршевой тяговоуроженности до 0,22 и 0,36, используется 35% и 70% мощности соответственно от более чем одного работающего упомянутого КГтД в СУ только на привод упомянутых ВТВ в конфигурации самолета с ПРС-R1, причем на режимах ВВП и зависания полная компенсация реактивного крутящего момента в ДСНС-Х2 от работающих ДНВ, выполненных с жестким креплением их лопастей, создается противоположным направлением вращения левого и правого ДНВ соответственно в плане, только, по часовой и против часовой стрелки, а изменение балансировки по курсу и тангажу, крену обеспечивается дифференциальным изменением тяги общего шага соосных ДНВ и изменением соответствующего циклического шага посредством автомата перекоса нижнего ДНВ соответственно, при этом автономная система управления БУСВ, включающая как автопилот для осуществления самостоятельного взлета после выбора и подтверждения маршрута, так и систему автоматического возврата в точку вылета, которая включится в том случае, если оператор не будет реагировать на запросы бортового компьютера, но и следящие системы, которые идентифицируют появившиеся на пути перелета препятствия и дадут команду на их автоматический облет, а затем обеспечат мягкую посадку в заданной точке, причем в походной конфигурации БУСВ его левая и правая внешние секции, складывающиеся вниз, от соответствующих изломов упомянутого оперения типа чайка, а в полетной конфигурации при виде спереди они смонтированы горизонтально или параллельно внутренней секции НСК, при этом в изломах консолей НСК типа обратная чайка за задней его кромкой имеются подкрыльные гондолы с отсеками для размещения в них задних главных стоек колесного шасси, причем внутренние секции НСК с подкрыльными гондолами имеют размах равновеликий размаху внутренних секции оперения типа чайка, а внешние секции упомянутого НСК выполнены с двойным складыванием внутренних и внешних его концевых частей, которые отклоняются последовательно соответственно вверх к оси симметрии и обратно вниз, размещаясь при этом наклонно к плоскости симметрии и вдоль верхних боковых сторон фюзеляжа и не выше и не шире сложенного оперения типа чайка, обеспечивая транспортную конфигурацию БУСВ при втянутом телескопическом верхнем вале колонки валов его соосных ДНВ, лопасти которых сложены в ДЛК и их пары одна над другой направлены назад по полету, причем при выполнении ВВП и зависания для повышения безопасности на концах законцовок упомянутого НСК имеются сигнальные огни и датчики сближения, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами, при этом спереди и сзади на законцовках подфюзеляжных килей, смонтированных под соответствующими внутренними секциями упомянутого оперения типа чайка, отклоненных наружу от плоскости симметрии, имеются соответствующие видеокамеры и ИК-излучатели, а центральная часть фюзеляжа и передние наплывы НСК снабжены нижними внутриотсечными катапультными устройствами для транспортировки и пуска, например, управляемых авиационных ракет, обеспечивающих возможность их использования при различных способах его исполнения и базирования, причем хвостовая балка, снабженная на ее конце по всей ширине фюзеляжа плоским обтекателем, который, образуя несущую поверхность, интегрирован по внешним его бортам с внутренними секциями упомянутого оперения типа чайка и имеет V-образную в плане заднюю кромку, которая в плане размещена параллельно аналогичной задней кромке плоского сопла, выполненным с термопоглощающим покрытием, снижающим ИК-заметность.
Кроме того, упомянутый БУСВ, имеющий как радиоканал закрытой связи с наземной мобильной платформой, выполненной в виде машины разведки и управления (МРУ), преимущественно плавающей с гусеничным или шестиколесным полноприводным движителем, так и радиолокационную станцию с передатчиком команд, оптико-электронную систему с двухканальным автоматом сопровождения цели и вычислительную систему с блоком автоматики многофункционального пульта управления, обеспечивающего при горизонтальном крейсерском полете самостоятельное нахождение ряда целей, идентификации их и принятие подтвержденного решения от оператора МРУ об уничтожении им выбранных, выполнен в виде перевозимого в походной конфигурации со сложенными внешними секциями НСК и хвостового оперения при опущенном внутреннем телескопическом вале колонки соосных валов и зафиксированных соответствующим образом лопастях соответствующих ДНВ и жесткого закрепления в грузовом отсеке МРУ противотанкового ракетного комплекса (ПТРК), при этом закрытый грузовой отсек МРУ, имеющий жесткий каркас, снабжен внутри как соответствующим ложементом для фиксированного в нем размещения фюзеляжа БУСВ при убранных стоек его шасси в походной конфигурации, так и открываемыми задними дверьми для выполнения погрузочно-разгрузочных работ, но и кран-балкой, смонтированной на потолке грузового отсека и по продольной оси МРУ, имеющий телескопическую стрелу и на ее конце трос с блоком и соответствующими захватами для зацепления фюзеляжа БУСВ, поднятия его после отключения работы замков всех фиксаторов и перемещения наружу на взлетную площадку на земле для вертикального с ней взлета БУСВ с боекомплектом, например, с противотанковыми управляемыми ракетами (ПТУР), размещенными в транспортно-пусковых контейнерах (ТПК), закрепленных по два ТПК с каждой стороны каждого балочного держателя, смонтированного под фюзеляжем и под внутренними секциями НСК и поочередно устанавливаемых/снимаемых операторами вручную.
Кроме того, упомянутая платформа выполнена в виде стационарной заряжающей станции, смонтированной на стартово-приемной платформе, размещаемой на транспортном средстве, например, на автомобильном, железнодорожном или водном, обеспечивающем его установку, транспортирование и функционирование при соответствующем передвижении, при этом в корабельном противолодочном ракетном комплексе (КПЛРК) палубный БУСВ, несущий более чем одну авиационную противолодочную ракету АПР-3Э, оснащен опускаемой гидроакустической системой, состоящей из индикатора акустических сигналов и двух приемников для их приема от гидроакустического буя, их кодирования и передачи по восьмиканальной закрытой связи на корабль для обработки в реальном масштабе времени, и высокочувствительным магнитометром, смонтированными в удлиненном обтекателе хвостовой балки так, что в нижней на его конце части установлен магниточувствительный элемент, работающий на расстоянии 30 м от водной поверхности, и снизу фюзеляжа под центром масс снабжен швартующим устройством с рычагом автоматического управления, имеющим на отклоняемой вниз/вверх телескопической штанге запорный механизм и устройство захвата, контактирующее с ячейками палубной решетки, обеспечивая возможность посадки на вертолетную площадку корабля при кренах до 25°.
Кроме того, упомянутая платформа, имеющая мобильное или аэромобильное исполнения, выполнена в виде автомобильного колесного прицепа, буксируемого, например, бронеавтомобилем типа "Тигр-М", снабженным своими выдвижными модулями вооружения, например, с ПТУР типа "Корнет-Д" или снабжена возможностью их раздельного закрепления на паллетах и, по необходимости, десантирования с транспортного самолета на парашютных системах для их быстрого развертывания.
Наличие вышеприведенных признаков позволяет в многоцелевом авиационном ракетном комплексе (МАРК) исполнить его упомянутую БПМС, которая представляет собой беспилотный ударный самолет-вертолет (БУСВ) с интегральной аэродинамической компоновкой, снабженный как фюзеляжем, носовая часть которого плавно сопряжена с вихре образующими передними наплывами, имеющими угол стреловидности и атаки отличными от крыла, увеличивающими на больших углах атаки несущую его способность, распространяющимися от передней кромки крыла и вдоль носовой части фюзеляжа к ее обтекателю, образуют в плане V-образную с округленной вершиной конфигурацию, так и по меньшей мере одним комбинированным газотурбинным двигателем (КГтД), который установлен в мотогондоле, смонтированной в фюзеляже за крылом, и выполнен в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с выносным однорядным вентилятором (ВОВ) в кольцевом обтекателе и по меньшей мере с одной свободной силовой турбиной (ССТ), снабженной передним выводом вала для отбора мощности и ее передачи через промежуточный редуктор на входной вал соосного редуктора, перераспределяющий взлетную мощность СУ между двухлопастными НВ (ДНВ) в симметрично-сбалансированной двухвинтовой соосно-несущей несущей системе (ДПНС-Х2) и ВОВ, имеющим лопатки с большой их круткой, работающим по тянущей схеме, установленным перед и соосно с промежуточным редуктором для создания в пропульсивно-реактивной системе (ПРС-R1 маршевой тяги, направленной горизонтально назад и параллельно оси симметрии при вертикальном и коротком взлете/посадке (ВВП и КВП) или горизонтальном поступательном полете, но и низко-расположенным стреловидным крылом (НСК), имеющим угол χ=+20° стреловидности по передней кромке, размах в  или
или  раза больше диметра (D) ДНВ, внутренние и внешние секции, образующие НСК типа обратная чайка, смонтированы с отрицательным (ϕвну) и положительным (ϕвне) углами поперечного V соответственно и выполненный с возможностью преобразования полетной его конфигурации после выполнения технологии короткого и вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или несущих их дупланных лопастей-крыльев (ДЛК), когда верхний и нижний ДНВ одновременно остановлены так, что при виде сверху их передняя и задняя лопасти как предварительно размещены перпендикулярно соответственно передней кромке левой и правой консолей НСК, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на угол 90° в горизонтальной плоскости наружу от оси симметрии лопастей-крыльев ДНВ так, что они фиксируются с прямой стреловидностью по передним кромкам ДЛК ДНВ, образуя с НСК равновеликую стреловидность χ=+20°, организующим синхронно-симметричные несущие поверхности их ДЛК относительно оси симметрии и зафиксированным в плане параллельно передней кромке НСК в полетной конфигурации реактивного самолета с ПРС-R1 и системой бипланных разноуровневых крыльев (СБРК), преобразующей большое удлинение НСК с λ,=10,5-11,5 до умеренного удлинения λ=5,0-6,0 СБРК, имеющей зафиксированные наружу от оси симметрии верхние и нижние ДЛК ДНВ, размещенные при виде спереди соответственно над левой и правой консолями НСК, но и обратно, при этом в мотогондоле КГтД с кольцевым обтекателем ВОВ по меньшей мере одна ССТ имеет промежуточный редуктор, снабженный продольными по его оси как входным валом, так и выходными внешним и внутренним соосными валами, первый из которых передает мощность через муфту сцепления на ВОВ, а второй - продлен за ВОВ и передает через муфту сцепления крутящий момент на соосный редуктор ДНВ, колонка выходных вертикальных соосных валов которого размещена в плане над центром масс, отклонена назад по полету на угол (∠α), который равновелик или равен 1/2 величине угла (∠αвне) атаки внешней секции НСК, причем набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно соответственно передние кромки наступающих лопастей соосных ДНВ и зафиксированных соответствующим образом упомянутых их ДЛК, выполняющих над НСК в СБРК роль верхних разрезных крыльев с углом атаки ДЛК, который равновелик углу (∠α) отклонения назад колонки валов соосного редуктора двух ДНВ, при этом прямой стреловидности передняя кромка каждого бокового воздухозаборника КГтД как левого и правого размещена в плане параллельно соответственно передней кромке наплывов НСК, причем сопло ССТ и внешние борта двигательного отсека фюзеляжа размещены при виде сверху и спереди соответственно по оси симметрии и между отклоненными наружу от плоскости симметрии соответствующими секциями хвостового оперения типа чайка, внутренние и внешние стреловидные секции которого выполнены в виде килей и стабилизаторов, снабжены рулями направления и высоты соответственно. Все это позволит повысить скорость и дальность полета реактивного БУСВ с соосными ДНВ, которые при выполнении операций с вертикальным подъемом грузов весьма перспективны в качестве останавливаемых и не убираемых в полете винтов-крыльев, что исключит наличие весьма конструктивно сложных систем складывания колонки их валов и уборки ДНВ, что упростит возможность преобразования его полетной конфигурации с винтокрыла или вертолета исполнения ДСНС-Х2 в соответствующий скоростной крылатый автожир или высокоскоростной самолет с маршевой ПРС-R1. Кроме того, аэро- или мобильное исполнение БУСВ для МАРК обеспечит возможность его перевозки по воздуху или земле в грузовом отсеке МРУ и позволит, использую его комбинированную СУ с КГтД, выполнить энергозатратный вертикальный взлет БУСВ как вертолета с приводом ДНВ от ССТ, но и достичь времени полета до 2,4-2,8 часа и скорости 700 км/ч в конфигурации реактивного самолета с ПРС-R1. Поэтому в БУСВ коэффициент аэродинамической выгодности СБРК с НСК и ДЛК ДНВ будет выше, чем у реактивного СВВП. Что позволит улучшить и весовую отдачу в сравнении с вертолетом соосной схемы. Более того, все это позволит также в сравнении с реактивным СВВП монопланной схемы повысить маневренность на малых скоростях полета и при переходных маневрах, но и снизить скорость сваливания за сет увеличения в 1,2 раза коэффициент поднятия СБРК, создающей НСК совместно с ДЛК ДНВ преимущество в производстве подъемной силы при крейсерском полете БУСВ.
раза больше диметра (D) ДНВ, внутренние и внешние секции, образующие НСК типа обратная чайка, смонтированы с отрицательным (ϕвну) и положительным (ϕвне) углами поперечного V соответственно и выполненный с возможностью преобразования полетной его конфигурации после выполнения технологии короткого и вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или несущих их дупланных лопастей-крыльев (ДЛК), когда верхний и нижний ДНВ одновременно остановлены так, что при виде сверху их передняя и задняя лопасти как предварительно размещены перпендикулярно соответственно передней кромке левой и правой консолей НСК, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на угол 90° в горизонтальной плоскости наружу от оси симметрии лопастей-крыльев ДНВ так, что они фиксируются с прямой стреловидностью по передним кромкам ДЛК ДНВ, образуя с НСК равновеликую стреловидность χ=+20°, организующим синхронно-симметричные несущие поверхности их ДЛК относительно оси симметрии и зафиксированным в плане параллельно передней кромке НСК в полетной конфигурации реактивного самолета с ПРС-R1 и системой бипланных разноуровневых крыльев (СБРК), преобразующей большое удлинение НСК с λ,=10,5-11,5 до умеренного удлинения λ=5,0-6,0 СБРК, имеющей зафиксированные наружу от оси симметрии верхние и нижние ДЛК ДНВ, размещенные при виде спереди соответственно над левой и правой консолями НСК, но и обратно, при этом в мотогондоле КГтД с кольцевым обтекателем ВОВ по меньшей мере одна ССТ имеет промежуточный редуктор, снабженный продольными по его оси как входным валом, так и выходными внешним и внутренним соосными валами, первый из которых передает мощность через муфту сцепления на ВОВ, а второй - продлен за ВОВ и передает через муфту сцепления крутящий момент на соосный редуктор ДНВ, колонка выходных вертикальных соосных валов которого размещена в плане над центром масс, отклонена назад по полету на угол (∠α), который равновелик или равен 1/2 величине угла (∠αвне) атаки внешней секции НСК, причем набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно соответственно передние кромки наступающих лопастей соосных ДНВ и зафиксированных соответствующим образом упомянутых их ДЛК, выполняющих над НСК в СБРК роль верхних разрезных крыльев с углом атаки ДЛК, который равновелик углу (∠α) отклонения назад колонки валов соосного редуктора двух ДНВ, при этом прямой стреловидности передняя кромка каждого бокового воздухозаборника КГтД как левого и правого размещена в плане параллельно соответственно передней кромке наплывов НСК, причем сопло ССТ и внешние борта двигательного отсека фюзеляжа размещены при виде сверху и спереди соответственно по оси симметрии и между отклоненными наружу от плоскости симметрии соответствующими секциями хвостового оперения типа чайка, внутренние и внешние стреловидные секции которого выполнены в виде килей и стабилизаторов, снабжены рулями направления и высоты соответственно. Все это позволит повысить скорость и дальность полета реактивного БУСВ с соосными ДНВ, которые при выполнении операций с вертикальным подъемом грузов весьма перспективны в качестве останавливаемых и не убираемых в полете винтов-крыльев, что исключит наличие весьма конструктивно сложных систем складывания колонки их валов и уборки ДНВ, что упростит возможность преобразования его полетной конфигурации с винтокрыла или вертолета исполнения ДСНС-Х2 в соответствующий скоростной крылатый автожир или высокоскоростной самолет с маршевой ПРС-R1. Кроме того, аэро- или мобильное исполнение БУСВ для МАРК обеспечит возможность его перевозки по воздуху или земле в грузовом отсеке МРУ и позволит, использую его комбинированную СУ с КГтД, выполнить энергозатратный вертикальный взлет БУСВ как вертолета с приводом ДНВ от ССТ, но и достичь времени полета до 2,4-2,8 часа и скорости 700 км/ч в конфигурации реактивного самолета с ПРС-R1. Поэтому в БУСВ коэффициент аэродинамической выгодности СБРК с НСК и ДЛК ДНВ будет выше, чем у реактивного СВВП. Что позволит улучшить и весовую отдачу в сравнении с вертолетом соосной схемы. Более того, все это позволит также в сравнении с реактивным СВВП монопланной схемы повысить маневренность на малых скоростях полета и при переходных маневрах, но и снизить скорость сваливания за сет увеличения в 1,2 раза коэффициент поднятия СБРК, создающей НСК совместно с ДЛК ДНВ преимущество в производстве подъемной силы при крейсерском полете БУСВ.
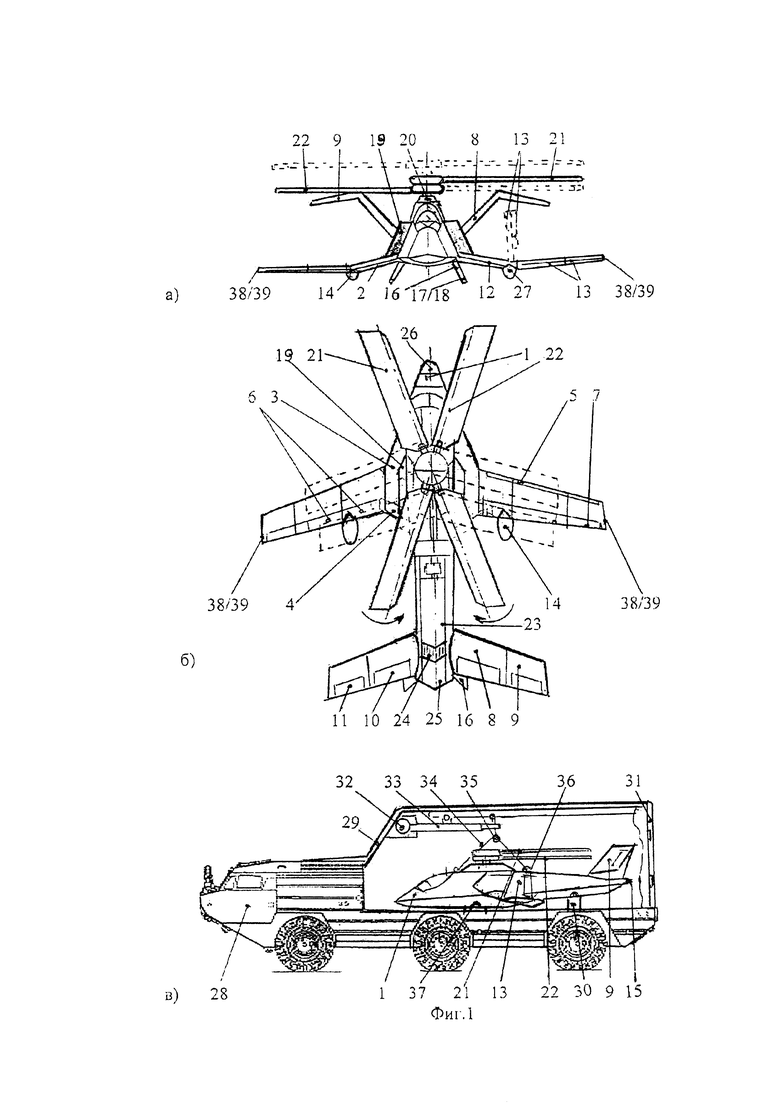
Предлагаемое изобретение МАРК с реактивным БУСВ, имеющим с наплывами НСК типа обратная чайка, соосные ДНВ в ДСНС-Х2 и ВОВ в ПРС-R1 с реактивным плоским соплом на конце фюзеляжа и между килей оперения типа чайка, представлено на фиг. 1 с вариантами его использования в составе ПТРК на базе плавающей МРУ.
На фиг. 1 изображен МАРК с БУСВ на общих видах спереди, сверху и сбоку с МРУ соответственно а), б) и в) при различном использовании реактивного БУСВ:
а) в полетной конфигурации реактивного самолета с НСК, создающим большую подъемную силу, чем подъемная сила, создаваемая авторотирующими соосными ДНВ или зафиксированными их ДЛК, и ВОВ, размещенным в мотогондоле за НСК и перед оперением типа чайка, создающим маршевую тягу в ПРС-R1 для скоростного или высокоскоростного полета и с условным размещением авторотирующих соосных ДНВ, лопасти которых показаны пунктиром в конфигурации крылатого автожира;
б) в полетной конфигурации вертолета с НСК и его стреловидностью χ=+20°, широкохордовыми ДНВ, вращающимися над консолями НСК, лопасти-крылья ДНВ показаны пунктиром и с условным размещением зафиксированных ДЛК верхнего и нижнего ДНВ со стреловидностью χ=+20° в конфигурации реактивного самолета для высокоскоростного полета и при выполнении взлетно-посадочных режимов;
в) изображен самоходный МАРК с МРУ, в грузовом отсеке которого закреплен на ложементе БУСВ со сложенными консолями НСК и оперения, убранными стойками его колесного шасси и при втянутом телескопическом верхнем вале колонки валов соосных ДНВ, лопасти которых сложены в ДЛК и их пары направлены назад по полету для его транспортирования в походной конфигурации в грузовом отсеке МРУ, имеющим жесткий каркас и под его потолком кран-балку с телескопической стрелой, тросом и блоком с захватами для выполнения погрузочно-разгрузочных операций.
Самоходный МАРК на базе плавающей МРУ с реактивным БУСВ исполнения ДСНС-Х2 и ВОВ в ПРС-R1, представленный на фиг. 1, имеет в интегральной аэродинамической схеме планер из алюминиевых сплавов и композитного углепластика, содержит фюзеляж 1, имеющий как НСК 2 с вихре образующими передними 3 и развитыми задними 4 наплывами, предкрылками 5, внутренними и внешними закрылками 6 и элеронами 7, так и хвостовое оперение типа чайка, имеющее внутренние 8 и внешние 9 стреловидные секции, которые соответственно снабжены рулями направления 10 и высоты 11. Внутренние 12 и внешние 13 секции НСК 2 со стреловидностью χ=+20°, смонтированные соответственно с положительным и отрицательным углами поперечного V, образующие крыло типа обратная чайка, имеют в их изломах и от задней кромки НСК 2 подкрыльные гондолы 14 с нижними отсеками для задних главных стоек колесного шасси (на фиг. 1 не показано). Внутренние секции 8 хвостового оперения типа чайка смонтированы по внешним бортам хвостовой балки 15, снизу которой смонтированы подфюзеляжные кили 16, имеющие спереди и сзади на их законцовках видеокамеры 17 и ИК-излучатели 18. За боковыми воздухозаборниками 19 фюзеляжа 1 на вертикальном пилоне 20 смонтированы верхний 21 и нижний 22 соосные ДНВ с жестким креплением их лопастей, имеющие для полной компенсации реактивного крутящего момента на режимах ВВП и зависания противоположное их вращение, только, соответственно по часовой и против часовой стрелки, а в колонке соосных валов внутренний вал выполнен телескопическим (на фиг. 1a телескопический вал показан в нижнем положении условно пунктиром). При этом управляющие моменты обеспечивает нижний ДНВ, снабженный автоматом перекоса (на фиг. 1 не показано). В мотогондоле 23 фюзеляжа 1 в ПРС-R1 смонтирован один КГтД, который имеет внешний и внутренний контуры соответственно с ВОВ и ССТ (на фиг. 1 не показано). Комбинированная СУ выполнена с передним выводом вала для отбора мощности от ССТ и возможностью передачи мощности от нее через промежуточный редуктор на соосный редуктор ДНВ 21-22 (на фиг. 1 не показаны), который плавно перераспределяет 95% и 5% от взлетной мощности СУ при выполнении ВВП и зависания между соответственно двумя ДНВ 21-22 в ДПНС-Х2 и ВОВ в ПРС-R1, имеющей на конце фюзеляжа и между внутренних секций 8 оперения типа чайка плоское сопло 24, имеющее V-образную заднюю кромку, которая в плане размещена параллельно аналогичной задней кромке удобообтекаемого обтекателя 25 хвостовой балки 16, выполнено с термопоглощающим покрытием, снижающим ИК-заметность.
Управление реактивным БУСВ обеспечивается общим и дифференциальным изменением шага соосных ДНВ 21-22 и отклонением элеронов 7 на НСК 2, рулей направления 10 и высоты 11 на хвостовом оперении типа чайка. При крейсерском скоростном или высокоскоростном полете в конфигурации крылатого автожира или реактивного самолета подъемная сила создается соответственно авторотирующими ДНВ 21-22 с НСК 2 или НСК 2 с зафиксированными ДЛК соосных ДНВ 21-22 (см. фиг. 1а) в СБРК, маршевая реактивная тяга - системой ПРС-R1 через плоское сопло 24, на режиме перехода - НСК 2 с ДНВ 21-22. После создания подъемной тяги ДНВ 21-22 в ДСНС-Х2 обеспечиваются режимы ВВП и зависания или КВП при создании маршевой тяги в ПРС-R1 (см. рис. 1а). При выполнении ВВП и зависания изменение балансировки по курсу и тангажу, крену обеспечивается дифференциальным изменением тяги общего шага соосных ДНВ 21-22 и изменением соответствующего циклического шага посредством автомата перекоса нижнего 21 ДНВ соответственно. После вертикального взлета и набора высоты выполняется разгонный полет на скоростях более 300…350 км/ч и осуществляется соответствующее уменьшение оборотов вращения ДНВ 21-22. По мере разгона с ростом подъемной силы крыла НСК 2 подъемная сила ДНВ 21-22 уменьшается. При достижении скоростей полета 400…450 км/ч и для перехода на самолетный режим полета ДНВ 21-22 синхронно останавливаются так, что их лопасти предварительно размещены при виде сверху перпендикулярно передней кромке консолей НСК 2 или параллельно оси симметрии и снабжены автоматическими узлами складывания их лопастей, которые затем синхронно поворачивают наружу от оси симметрии лопасти-крылья ДНВ 21-22 на угол 90° так, что их ДЛК зафиксированы с прямой стреловидностью по передним их кромкам, образуя равновеликую стреловидность χ=+20° с НСК в СБРК (см. фиг. 1в). При создании реактивной тяги в ПРС-R1 производится высокоскоростной крейсерский полет БУСВ, при котором путевое управление обеспечивается рулями направления 10. Продольное и поперечное управление при этом осуществляется синфазным и дифференциальным отклонением соответственно рулей высоты 11 хвостового оперения типа чайка и элеронов 7 НСК 2. Радиолокационная станция 26 с передатчиком команд и оптико-электронная система с двухканальным автоматом 27 сопровождения цели смонтированы соответственно в носовой части фюзеляжа 1 и спереди подкрыльных гондол 14.
Плавающая МРУ 28 имеет с жестким каркасом закрытый грузовой отсек 29, снабжен внутри соответствующим ложементом 30 для фиксированного в нем размещения фюзеляжа 1 БУСВ при убранных стоек его шасси в походной его конфигурации, но и открываемыми задними дверьми 31 для выполнения погрузочно-разгрузочных работ, но и кран-балкой 32, смонтированной на потолке грузового отсека 29 и по продольной оси МРУ 28, имеющий телескопическую стрелу 33 и на ее конце трос 34 с блоком 35 и соответствующими захватами 36 для зацепления фюзеляжа 1 БУСВ, поднятия его после отключения работы замков всех фиксаторов 37 на ложементе 30 и перемещения наружу на взлетную площадку на земле для вертикального с ней взлета БУСВ с боекомплектом, например, с ПТУР, размещенными на нижних внутриотсечных катапультных устройств для транспортировки и их пуска (на фиг. 1 не показано).
При выполнении ВВП для повышения безопасности на законцовках НСК 2 имеются сигнальные огни 38 и датчики сближения 39, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами. Система автопилота БУСВ осуществляют самостоятельный взлет после выбора и подтверждения маршрута, идентифицируют появившиеся на пути следования препятствия и дает команду на их облет, а затем обеспечит мягкую посадку в заданной точке. Кроме того, реактивный БУСВ имеет систему автоматического возврата в точку вылета, которая включится в том случае, если оператор не будет реагировать на запросы компьютера. После приземления на площадку на земле складываются внешние секции 9 хвостового оперения и 12 НСК 2, а ДЛК НВ 21-22 размещаются по оси, затем кран-балкой 32 БУСВ загружается на ложементы 37 для его перевозки в МРУ 28 по шоссе или земле.
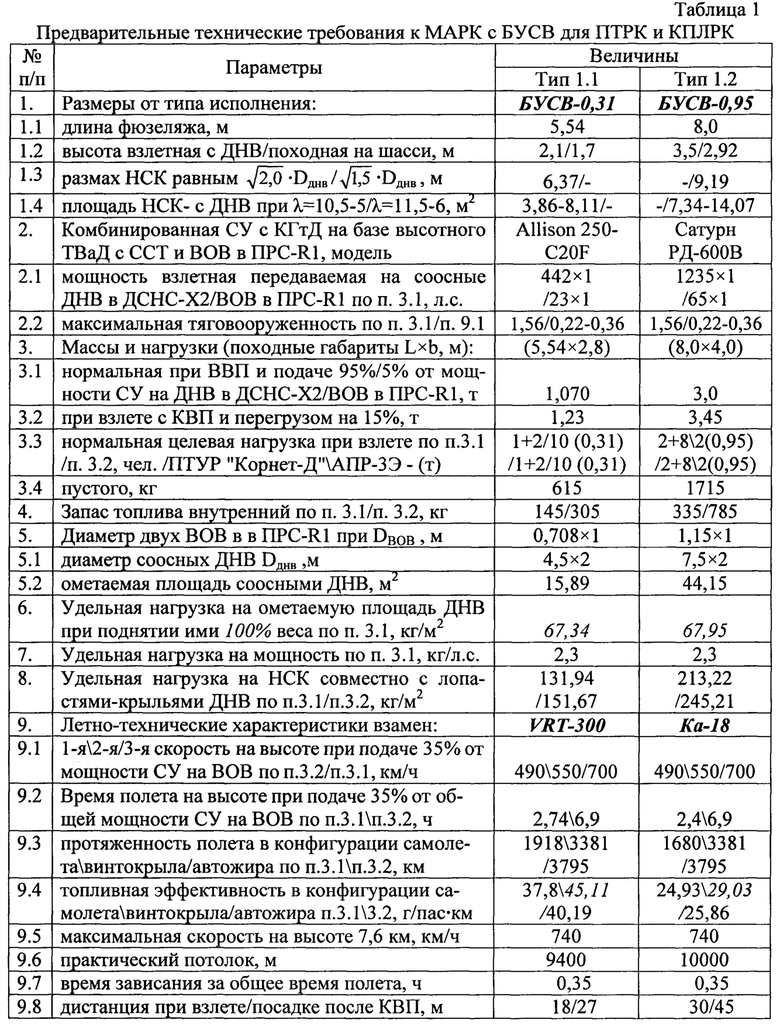
Таким образом, освоение БУСВ с улучшенными тактико-техническими показателями для МАРК в современных условиях - задача многоплановая и не является технически неразрешимой. Поэтому дальнейшие исследования в процессе развития широкого семейства БУСВ, реализуемого по концепции ДСНС-Х2 и ПРС-R1, то самой жизнью будет продиктована задача освоения и палубного БУСВ-0,95 (см. табл. ).
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ТРАНСЗВУКОВОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2711451C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ-РАКЕТОНОСЕЦ | 2019 |
|
RU2708782C1 |
| ВЫСОКОСКОРОСТНОЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2706294C1 |
| БЕСПИЛОТНЫЙ УДАРНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2019 |
|
RU2733678C1 |
| КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ АДАПТИВНЫЙ | 2019 |
|
RU2720569C1 |
| АВИАЦИОННЫЙ УДАРНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2019 |
|
RU2722520C1 |
| БЕСПИЛОТНЫЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2699513C1 |
| КОМПЛЕКС АДАПТИВНЫЙ РАКЕТНО-АВИАЦИОННЫЙ | 2019 |
|
RU2720592C1 |
| МАЛОЗАМЕТНАЯ АВИАЦИОННО-РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2725372C1 |
| АВИАЦИОННО-РАКЕТНАЯ УДАРНАЯ СИСТЕМА | 2019 |
|
RU2721803C1 |
Изобретение относится к средствам военной техники, в частности к конструкциям ракетных комплексов. Авиационный ракетный комплекс с беспилотным ударным самолетом-вертолетом включает платформу, содержащую стартовую станцию, энергетическую установку и блок управления полетом беспилотной многовинтовой системы (БПМС). БПМС выполнена в виде беспилотного ударного самолета-вертолета с интегральной аэродинамической компоновкой, имеющего два соосных двухлопастных несущих винта (ДНВ), хвостовое оперение типа чайка и свободную силовую турбину, размещенную в кормовой мотогондоле, приводящую ДНВ и выносной однорядный вентилятор, создающий при коротком взлете/посадке или горизонтальном полете пропульсивно-реактивную тягу. БПМС выполнен с возможностью складывания консолей крыла, хвостового оперения и фиксации лопастей-крыльев ДНВ по оси симметрии для трансформации в походную конфигурацию для перевозки по земле в грузовом отсеке на ложементе машины разведки и управления. Обеспечивается повышение скорости и дальности полета, увеличение взлетного веса и весовой отдачи, упрощение управления при зависании и обеспечение трансформации в походную конфигурацию. 4 з.п. ф-лы, 1 ил., 1 табл.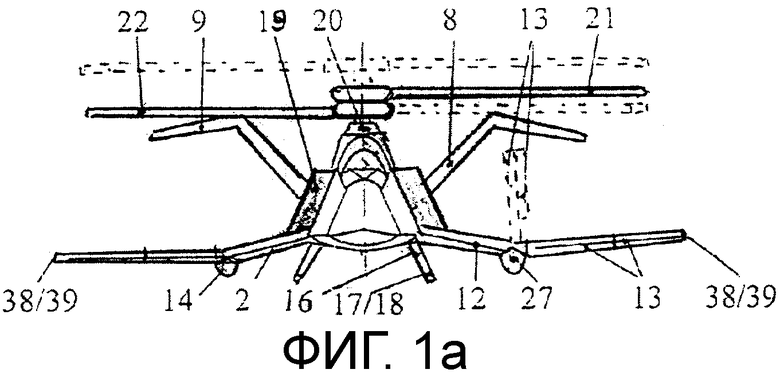
1. Авиационный ракетный комплекс с беспилотным ударным самолетом-вертолетом, включающий платформу, содержащую средства базирования со стартовой станцией, энергетическую установку и блок управления полетом беспилотной многовинтовой системы (БПМС) с силовой установкой (СУ), отличающийся тем, что упомянутая БПМС представляет собой беспилотный ударный самолет-вертолет (БУСВ) с интегральной аэродинамической компоновкой, снабженный как фюзеляжем, носовая часть которого плавно сопряжена с вихреобразующими передними наплывами, имеющими угол стреловидности и атаки, отличные от крыла, увеличивающими на больших углах атаки несущую его способность, распространяющимися от передней кромки крыла и вдоль носовой части фюзеляжа к ее обтекателю, образуют в плане V-образную с округленной вершиной конфигурацию, так и по меньшей мере одним комбинированным газотурбинным двигателем (КГтД), который установлен в мотогондоле, смонтированной в фюзеляже за крылом, и выполнен в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с выносным однорядным вентилятором (ВОВ) в кольцевом обтекателе и по меньшей мере с одной свободной силовой турбиной (ССТ), снабженной передним выводом вала для отбора мощности и ее передачи через промежуточный редуктор на входной вал соосного редуктора, перераспределяющий взлетную мощность СУ между двухлопастными НВ (ДНВ) в симметрично-сбалансированной двухвинтовой соосно-несущей несущей системе (ДПНС-Х2) и ВОВ, имеющим лопатки с большой их круткой, работающим по тянущей схеме, установленным перед и соосно с промежуточным редуктором для создания в пропульсивно-реактивной системе ПРС-R1 маршевой тяги, направленной параллельно оси симметрии при вертикальном и коротком взлете/посадке (ВВП и КВП) или горизонтальном поступательном полете, но и низкорасположенным стреловидным крылом (НСК), имеющим угол χ=+20° стреловидности по передней кромке, размах в  или
или  раза больше диметра (D) ДНВ, внутренние и внешние секции, образующие НСК типа обратная чайка, смонтированы с отрицательным (ϕвну) и положительным (ϕвне) углами поперечного V соответственно, и выполненный с возможностью преобразования полетной его конфигурации после выполнения технологии короткого и вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или несущих их дупланных лопастей-крыльев (ДЛК), когда верхний и нижний ДНВ одновременно остановлены так, что при виде сверху их передняя и задняя лопасти как предварительно размещены перпендикулярно соответственно передней кромке левой и правой консолей НСК, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на угол 90° в горизонтальной плоскости наружу от оси симметрии лопастей-крыльев ДНВ так, что они фиксируются с прямой стреловидностью по передним кромкам ДЛК ДНВ, образуя с НСК равновеликую стреловидность χ=+20°, организующим синхронно-симметричные несущие поверхности их ДЛК относительно оси симметрии и зафиксированным в плане параллельно передней кромке НСК в полетной конфигурации реактивного самолета с ПРС-R1 и системой бипланных разноуровневых крыльев (СБРК), преобразующей большое удлинение НСК с λ=10,5-11,5 до умеренного удлинения λ=5,0-6,0 СБРК, имеющей зафиксированные наружу от оси симметрии верхние и нижние ДЛК ДНВ, размещенные при виде спереди соответственно над левой и правой консолями НСК, но и обратно, при этом в мотогондоле КГтД с кольцевым обтекателем ВОВ по меньшей мере одна ССТ имеет промежуточный редуктор, снабженный продольными по его оси как входным валом, так и выходными внешним и внутренним соосными валами, первый из которых передает мощность через муфту сцепления на ВОВ, а второй - продлен за ВОВ и передает через муфту сцепления крутящий момент на соосный редуктор ДНВ, колонка выходных вертикальных соосных валов которого размещена в плане над центром масс, отклонена назад по полету на угол (∠α), который равновелик или равен 1/2 величине угла (∠αвне) атаки внешней секции НСК, причем набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно соответственно передние кромки наступающих лопастей соосных ДНВ и зафиксированных соответствующим образом упомянутых их ДЛК, выполняющих над НСК в СБРК роль верхних разрезных крыльев с углом атаки ДЛК, который равновелик углу (∠α) отклонения назад колонки валов соосного редуктора двух ДНВ, при этом прямой стреловидности передняя кромка каждого бокового воздухозаборника КГтД как левого и правого размещена в плане параллельно соответственно передней кромке наплывов НСК, причем сопло ССТ и внешние борта двигательного отсека фюзеляжа размещены при виде сверху и спереди соответственно по оси симметрии и между отклоненными наружу от плоскости симметрии соответствующими секциями хвостового оперения типа чайка, внутренние и внешние стреловидные секции которого выполнены в виде килей и стабилизаторов, снабжены рулями направления и высоты соответственно.
раза больше диметра (D) ДНВ, внутренние и внешние секции, образующие НСК типа обратная чайка, смонтированы с отрицательным (ϕвну) и положительным (ϕвне) углами поперечного V соответственно, и выполненный с возможностью преобразования полетной его конфигурации после выполнения технологии короткого и вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с широкохордовыми ДНВ, работающими на режимах их авторотации или несущих их дупланных лопастей-крыльев (ДЛК), когда верхний и нижний ДНВ одновременно остановлены так, что при виде сверху их передняя и задняя лопасти как предварительно размещены перпендикулярно соответственно передней кромке левой и правой консолей НСК, так и снабжены автоматическими узлами синхронного их складывания посредством поворота на угол 90° в горизонтальной плоскости наружу от оси симметрии лопастей-крыльев ДНВ так, что они фиксируются с прямой стреловидностью по передним кромкам ДЛК ДНВ, образуя с НСК равновеликую стреловидность χ=+20°, организующим синхронно-симметричные несущие поверхности их ДЛК относительно оси симметрии и зафиксированным в плане параллельно передней кромке НСК в полетной конфигурации реактивного самолета с ПРС-R1 и системой бипланных разноуровневых крыльев (СБРК), преобразующей большое удлинение НСК с λ=10,5-11,5 до умеренного удлинения λ=5,0-6,0 СБРК, имеющей зафиксированные наружу от оси симметрии верхние и нижние ДЛК ДНВ, размещенные при виде спереди соответственно над левой и правой консолями НСК, но и обратно, при этом в мотогондоле КГтД с кольцевым обтекателем ВОВ по меньшей мере одна ССТ имеет промежуточный редуктор, снабженный продольными по его оси как входным валом, так и выходными внешним и внутренним соосными валами, первый из которых передает мощность через муфту сцепления на ВОВ, а второй - продлен за ВОВ и передает через муфту сцепления крутящий момент на соосный редуктор ДНВ, колонка выходных вертикальных соосных валов которого размещена в плане над центром масс, отклонена назад по полету на угол (∠α), который равновелик или равен 1/2 величине угла (∠αвне) атаки внешней секции НСК, причем набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно соответственно передние кромки наступающих лопастей соосных ДНВ и зафиксированных соответствующим образом упомянутых их ДЛК, выполняющих над НСК в СБРК роль верхних разрезных крыльев с углом атаки ДЛК, который равновелик углу (∠α) отклонения назад колонки валов соосного редуктора двух ДНВ, при этом прямой стреловидности передняя кромка каждого бокового воздухозаборника КГтД как левого и правого размещена в плане параллельно соответственно передней кромке наплывов НСК, причем сопло ССТ и внешние борта двигательного отсека фюзеляжа размещены при виде сверху и спереди соответственно по оси симметрии и между отклоненными наружу от плоскости симметрии соответствующими секциями хвостового оперения типа чайка, внутренние и внешние стреловидные секции которого выполнены в виде килей и стабилизаторов, снабжены рулями направления и высоты соответственно.
2. Авиационный ракетный комплекс с БУСВ по п. 1, отличающийся тем, что на режимах ВВП и зависания БУСВ упомянутая по меньшей мере одна его ССТ выполнена с элементами цифрового программного управления, сочетающего в двухрежимной системе регулирования и управления одновременный режим ее работы как при отборе 95% взлетной ее мощности на привод упомянутых ДНВ, так и при сбалансированном распределении 5% остаточной мощности на привод упомянутого ВОВ, создающего минимальную маршевую тягу для необходимого горизонтального поступательного полета, при этом для экономичного высокоскоростного горизонтального полета, достигая маршевой тяговооруженности до 0,22 и 0,36, используется 35% и 70% мощности соответственно от более чем одного работающего упомянутого КГтД в СУ только на привод упомянутых ВОВ в конфигурации самолета с ПРС-R1, причем на режимах ВВП и зависания полная компенсация реактивного крутящего момента в ДСНС-Х2 от работающих ДНВ, выполненных с жестким креплением их лопастей, создается противоположным направлением вращения верхнего и нижнего ДНВ соответственно в плане, только, по часовой и против часовой стрелки, а изменение балансировки по курсу и тангажу, крену обеспечивается дифференциальным изменением тяги общего шага соосных ДНВ и изменением соответствующего циклического шага посредством автомата перекоса нижнего ДНВ соответственно, при этом автономная система управления БУСВ, включающая как автопилот для осуществления самостоятельного взлета после выбора и подтверждения маршрута, так и систему автоматического возврата в точку вылета, которая включится в том случае, если оператор не будет реагировать на запросы бортового компьютера, но и следящие системы, которые идентифицируют появившиеся на пути перелета препятствия и дадут команду на их автоматический облет, а затем обеспечат мягкую посадку в заданной точке, причем в походной конфигурации БУСВ его левая и правая внешние секции, складывающиеся вниз, от соответствующих изломов упомянутого оперения типа чайка, а в полетной конфигурации при виде спереди они смонтированы горизонтально или параллельно внутренней секции НСК, при этом в изломах консолей НСК типа обратная чайка за задней его кромкой имеются подкрыльные гондолы с отсеками для размещения в них задних главных стоек колесного шасси, причем внутренние секции НСК с подкрыльными гондолами имеют размах, равновеликий размаху внутренних секции оперения типа чайка, а внешние секции упомянутого НСК выполнены с двойным складыванием внутренних и внешних его концевых частей, которые отклоняются последовательно соответственно вверх к оси симметрии и обратно вниз, размещаясь при этом наклонно к плоскости симметрии и вдоль верхних боковых сторон фюзеляжа и не выше и не шире сложенного оперения типа чайка, обеспечивая транспортную конфигурацию БУСВ при втянутом телескопическом верхнем вале колонки валов его соосных ДНВ, лопасти которых сложены в ДЛК и их пары одна над другой направлены назад по полету, причем при выполнении ВВП и зависания для повышения безопасности на концах законцовок упомянутого НСК имеются сигнальные огни и датчики сближения, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами, при этом спереди и сзади на законцовках подфюзеляжных килей, смонтированных под соответствующими внутренними секциями упомянутого оперения типа чайка, отклоненных наружу от плоскости симметрии, имеются соответствующие видеокамеры и ИК-излучатели, а центральная часть фюзеляжа и передние наплывы НСК снабжены нижними внутриотсечными катапультными устройствами для транспортировки и пуска, например, управляемых авиационных ракет, обеспечивающих возможность их использования при различных способах его исполнения и базирования, причем хвостовая балка, снабженная на ее конце по всей ширине фюзеляжа плоским обтекателем, который, образуя несущую поверхность, интегрирован по внешним его бортам с внутренними секциями упомянутого оперения типа чайка и имеет V-образную в плане заднюю кромку, которая в плане размещена параллельно аналогичной задней кромке плоского сопла, выполненным с термопоглощающим покрытием, снижающим ИК-заметность.
3. Авиационный ракетный комплекс с БУСВ по любому из пп. 1, 2, отличающийся тем, что упомянутый БУСВ, имеющий как радиоканал закрытой связи с наземной мобильной платформой, выполненной в виде машины разведки и управления (МРУ), преимущественно плавающей с гусеничным или шестиколесным полноприводным движителем, так и радиолокационную станцию с передатчиком команд, оптико-электронную систему с двухканальным автоматом сопровождения цели и вычислительную систему с блоком автоматики многофункционального пульта управления, обеспечивающего при горизонтальном крейсерском полете самостоятельное нахождение ряда целей, идентификацию их и принятие подтвержденного решения от оператора МРУ об уничтожении им выбранных, выполнен в виде перевозимого в походной конфигурации со сложенными внешними секциями НСК и хвостового оперения при опущенном внутреннем телескопическом вале колонки соосных валов и зафиксированных соответствующим образом лопастях соответствующих ДНВ и жесткого закрепления в грузовом отсеке МРУ противотанкового ракетного комплекса (ПТРК), при этом закрытый грузовой отсек МРУ, имеющий жесткий каркас, снабжен внутри как соответствующим ложементом для фиксированного в нем размещения фюзеляжа БУСВ при убранных стойках его шасси в походной конфигурации, так и открываемыми задними дверьми для выполнения погрузочно-разгрузочных работ, но и кран-балкой, смонтированной на потолке грузового отсека и по продольной оси МРУ, имеющий телескопическую стрелу и на ее конце трос с блоком и соответствующими захватами для зацепления фюзеляжа БУСВ, поднятия его после отключения работы замков всех фиксаторов и перемещения наружу на взлетную площадку на земле для вертикального с ней взлета БУСВ с боекомплектом, например с противотанковыми управляемыми ракетами (ПТУР), размещенными в транспортно-пусковых контейнерах (ТПК), закрепленных по два ТПК с каждой стороны каждого балочного держателя, смонтированного под фюзеляжем и под внутренними секциями НСК и поочередно устанавливаемых/снимаемых операторами вручную.
4. Авиационный ракетный комплекс с БУСВ по любому из пп. 1, 2, отличающийся тем, что упомянутая платформа выполнена в виде стационарной заряжающей станции, смонтированной на стартово-приемной платформе, размещаемой на транспортном средстве, например, на автомобильном, железнодорожном или водном, обеспечивающем его установку, транспортирование и функционирование при соответствующем передвижении, при этом в корабельном противолодочном ракетном комплексе (КПЛРК) палубный БУСВ, несущий более чем одну авиационную противолодочную ракету АПР-3Э, оснащен опускаемой гидроакустической системой, состоящей из индикатора акустических сигналов и двух приемников для их приема от гидроакустического буя, их кодирования и передачи по восьмиканальной закрытой связи на корабль для обработки в реальном масштабе времени, и высокочувствительным магнитометром, смонтированными в удлиненном обтекателе хвостовой балки так, что в нижней на его конце части установлен магниточувствительный элемент, работающий на расстоянии 30 м от водной поверхности, и снизу фюзеляжа под центром масс снабжен швартующим устройством с рычагом автоматического управления, имеющим на отклоняемой вниз/вверх телескопической штанге запорный механизм и устройство захвата, контактирующее с ячейками палубной решетки, обеспечивая возможность посадки на вертолетную площадку корабля при кренах до 25°.
5. Авиационный ракетный комплекс с БУСВ по любому из пп. 1, 2, отличающийся тем, что упомянутая платформа, имеющая мобильное или аэромобильное исполнения, выполнена в виде автомобильного колесного прицепа, буксируемого, например, бронеавтомобилем типа "Тигр-М", снабженным своими выдвижными модулями вооружения, например, с ПТУР типа "Корнет-Д", или снабжена возможностью их раздельного закрепления на паллетах и, по необходимости, десантирования с транспортного самолета на парашютных системах для их быстрого развертывания.
| АВИАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2317227C1 |
| Способ непрерывного восстановления n-нитрофенетола | 1939 |
|
SU56675A1 |
| Установка для заправки шприцев консистентной смазкой | 1959 |
|
SU130297A1 |
| CN 104870308 A, 26.08.2015 | |||
| СКОРОСТНОЙ ВЕРТОЛЕТ С ПЕРЕКРЕЩИВАЮЩИМИСЯ ВИНТАМИ | 2016 |
|
RU2636826C1 |

