Изобретение относится к области точного приборостроения и может найти применение в системах пространственной ориентации, стабилизации, траекторного управления и навигационного счисления движения различных объектов за счет прецизионного измерения ускорений, действующих на объект в широком диапазоне эксплуатационных температур.
Например, из уровня техники известен маятниковый акселерометр QA-2000 (https://pdfl.alldatasheet.com/clatasheet-pdf/view/450653/HONEYWELL-ACC/QA-2000.html), содержащий цилиндрический герметичный корпус, в центральной части которого выполнена базирующая поверхность, ортогональная оси чувствительности акселерометра, при этом на одной торцевой поверхности корпуса расположены гермовводы, сонаправленные с базирующей поверхностью центральной части корпуса, при этом внутри корпуса размещен чувствительный элемент, состоящий из маятника, изготовленного из аморфного кварца, на подвижной части которого расположены последовательно соединенные катушки датчика силы и электроды дифференциального датчика перемещения, а неподвижная часть зажата между двумя идентичными корпусами, каждый из которых является частью магнитной системы датчика силы и электродом дифференциального датчика перемещения, при этом корпуса жестко соединены с помощью кольца, а сам чувствительный элемент установлен в корпусе акселерометра при помощи изоляционного кольца.
Известное решение имеет, в частности, следующие недостатки:
1. Гермовводы расположены на торцевой поверхности нижней части корпуса на достаточно близком расстоянии относительно друг друга и сона-правлены с базирующей поверхностью центральной части корпуса. Такое расположение гермовводов усложняет процесс монтажа акселерометра в изделие, так как после фиксации его на базирующей поверхности в изделии доступ к гермовводам оказывается крайне ограниченным.
2. Расположение базирующей поверхности акселерометра в центральной части корпуса существенно усложняет процесс доводки базирующей плоскости до ортогональности к оси чувствительности акселерометра (вызванной погрешностью установки чувствительного элемента в корпус), т.к. выступающая нижняя торцевая поверхность корпуса усложняет механическую обработку базирующей плоскости. При этом неортогональность базирующей плоскости к оси чувствительности акселерометра приводит к искажению измерений ускорения, а, следовательно, снижает точность акселерометра.
Также известен маятниковый акселерометр (Патент РФ на полезную модель №104320), имеющий герметичный корпус, внутри которого размещен маятник из аморфного кварца, на подвижной части которого расположены последовательно соединенные катушки датчика силы и электроды дифференциального датчика перемещения, а неподвижная часть зажата между двумя идентичными корпусами из токопроводящего материала с низким коэффициентом температурного расширения, каждый из которых является частью магнитной системы датчика силы и электродом дифференциального датчика перемещения, при этом корпуса чувствительного элемента соединены между собой с помощью упругих элементов и снабжены поперечными выступами, обеспечивающими фиксацию чувствительного элемента между опорными элементами, причем один из упомянутых опорных элементов является промежуточным между плоской пружиной и поперечными выступами одного из соединяемых корпусов, а другой является промежуточным между фиксирующим элементом и установочным кольцом.
Общим недостатком указанных известных акселерометров являются конструктивные решения соединения корпусов чувствительного элемента, которое не обеспечивает одновременного решения задач их центрирования, а так же стабилизации нормальных и тангенциальных сил в местах зажима неподвижной части маятника. Указанное является одной из существенных причин нестабильности температурных зависимостей выходных параметров акселерометра, являющихся следствием различия температурных коэффициентов линейного расширения (ТКЛР) материалов маятника, корпусов чувствительного элемента и опорных элементов, что приводит к снижению точности измерений.
Задачей, на решение которой направлено настоящее изобретение, является повышение точности акселерометра, при одновременном упрощении процесса его сборки и монтажа на рабочую поверхность подвижного объекта.
Поставленная задача решается маятниковым акселерометром, имеющим герметичный корпус в виде двух цилиндров разного диаметра, сопряженных посредством конической сопрягающей поверхности, на которой расположены вертикально ориентированные гермовводы, при этом базирующая поверхность корпуса выполнена на торцевой части большего цилиндра, внутри корпуса размещен маятник из аморфного кварца, на подвижной части которого расположены последовательно соединенные катушки датчика силы и электроды дифференциального датчика перемещения, а неподвижная часть зажата между двумя идентичными корпусами из токопроводящего материала с низким коэффициентом температурного расширения, каждый из которых является частью магнитной системы датчика силы и электродом дифференциального датчика перемещения, при этом корпуса чувствительного элемента соединены между собой с помощью упругого элемента, а сам чувствительный элемент установлен в корпусе акселерометра на плоской пружине при помощи двух диэлектрических опорных элементов, при этом упругий элемент, соединяющий корпуса чувствительного элемента, имеет кольцевую поверхность, центральная часть которой выполнена в виде единичной гофры, а также примыкающие к ней цилиндрические части, одна из которых снабжена кольцевым выступом, наружный диаметр которого больше максимального диаметра выпуклой поверхности единичной гофры, при этом температурные коэффициенты линейного расширения материала корпусов чувствительного элемента и материала упругого элемента одинаковы, причем один из упомянутых опорных элементов является промежуточным между плоской пружиной и кольцевым выступом упругого элемента, а другой является промежуточным между фиксирующим элементом и упомянутым кольцевым выступом.
Так, наличие в конструкции акселерометра предложенного упругого элемента обеспечивает за счет его кольцевой поверхности строгое центрирование корпусов чувствительного элемента внутри корпуса акселерометра, исключая соприкосновение корпусов чувствительного элемента с опорными элементами, которые вследствие различия ТКЛР их материалов могут привести к перекосу маятника чувствительного элемента относительно корпуса прибора. Кроме того за счет единичной гофры упругого элемента обеспечивается гарантированное усилие сжатия корпусов чувствительного элемента во всем рабочем температурном диапазоне. Таким образом, в результате указанного выполнения упругого элемента стабилизируются нормальные и тангенциальные силы в местах зажима неподвижной части маятника, а, следовательно, снижается нестабильность нулевого сигнала акселерометра, что позволяет в целом повысить точность измерений. Кроме того, предлагаемый упругий элемент упрощает установку и фиксацию чувствительного элемента между опорными элементами в корпусе акселерометра, так как не требует строгого центрирования опорных элементов, что позволяет упростить процесс сборки акселерометра.
Кроме того, выполнение герметичного корпуса в виде двух сопряженных цилиндров разного диаметра с конической сопрягающей поверхностью, на которой расположены вертикально ориентированные гермовводы, обеспечивает открытый доступ к гермовводам после установки акселерометра на рабочую поверхность, что упрощает монтаж акселерометра в изделие. При этом выполнение базирующей поверхности на торцевой части большего цилиндра позволяет упростить механическую обработку базирующей поверхности с целью доведения ее до ортогональности к оси чувствительности.
Сущность настоящего изобретения поясняется чертежами, где:
- на Фиг. 1 показан чувствительный элемент акселерометра;
- на Фиг. 2 - маятник акселерометра, вид сверху;
- на Фиг. 3 - корпус акселерометра, вид спереди;
- на Фиг. 4 - корпус акселерометра, вид снизу;
- на Фиг. 5 - корпус акселерометра, вид сверху.
- на Фиг. 6 - упругий элемент, вид сбоку.
Конструктивно акселерометр имеет корпус 1 (Фиг. 1) с крышкой 25 (Фиг. 4), обеспечивающей его внутреннюю герметичность. Корпус 1 выполнен в виде двух сопряженных с помощью конической поверхности 4 цилиндров 2 и 3 разного диаметра (Фиг. 3). На торцевой части большего цилиндра выполнена базирующая (опорная) поверхность 6 (Фиг. 3), снабженная отверстиями 26 под крепежные элементы (Фиг. 4). На конической поверхности 4 расположены вертикально ориентированные гермовводы 5 (Фиг. 3, 5). В корпус 1 помещен чувствительный элемент 7 (Фиг. 1), который состоит из маятника 27 (Фиг. 2), изготовленного из аморфного кварца, и имеющего подвижную часть 8 и неподвижную кольцевую часть 9 (Фиг. 1, 2), а также идентичных корпусов 10 и 11 (Фиг. 1), изготовленных из железо-никелевого сплава (инвар). На подвижной части 8 маятника 27 расположены последовательно соединенные катушки датчика силы (на фиг. не показаны) и электроды 12 дифференциального датчика перемещения, выполненные в виде нанесенного на поверхности маятника тонкопленочного покрытия. Сама подвижная часть 8 соединена с неподвижной частью 9 при помощи двух упругих торсионов 13 (Фиг. 1, 2), выполненных также из аморфного кварца. В свою очередь неподвижная часть 9 зажата между двумя идентичными корпусами 10 и 11, при этом, в местах зажима расположены платики 14 (Фиг. 2), выступающие за основную поверхность неподвижной части 9. Каждый из корпусов 10, 11 также является электродом дифференциального датчика перемещения и частью магнитной системы датчика силы, включающей в себя также и постоянный магнит, установленный внутри данного корпуса (на фиг. не показан). Корпуса 10 и 11 соединены между собой с помощью кольцевого упругого элемента 15 (материал - инвар), имеющего цилиндрические части 16, 17 и центральную часть 18 в виде единичной гофры (Фиг. 1, 6). На цилиндрической части 16 имеется установочное кольцо 19, которое обеспечивает фиксацию чувствительного элемента между выполненными в виде полых цилиндров керамическими опорными элементами 20 и 21 (Фиг. 1). При этом торцевая поверхность опорного элемента 20 опирается на установочное кольцо 19 упругого элемента 15, при этом другая торцевая поверхность опорного элемента 20 опирается на плоскую пружину 22, а опорного элемента 21 - на неподвижный относительно корпуса акселерометра фиксирующий элемент 23 через шайбу 24.
Процесс сборки и последующего монтажа предложенного акселерометра осуществляется следующим образом.
Сначала к корпусу 10 точечной лазерной сваркой крепится цилиндрическая часть 17 упругого элемента 15. Данная сборка устанавливается в спецприспособление (на Фиг. не показано) с базировкой на установочное кольцо 19. Далее устанавливается маятник 27 и на него корпус 11, который после приложенного усилия сжатия фиксируется относительно цилиндрической части 16 упругого элемента точечной лазерной сваркой. В верхнюю часть корпуса 1 устанавливается плоская пружина 22, на которую помещают опорный элемент 20. Затем опорный элемент 20 устанавливают на установочное кольцо 19 упругого элемента и устанавливают второй опорный элемент 21, после чего устанавливают фиксирующий элемент 23 (например, через шайбу 24), к которому прикладывают тарированное усилие, после чего осуществляют его фиксацию относительно корпуса 1 точечной лазерной сваркой. После этого дополнительно в корпус прибора могут монтироваться, например, термодатчик и/или усилитель обратной связи (на Фиг. не показаны). Затем все смонтированные внутрь корпуса элементы герметично закрываются крышкой 25 при помощи лазерной сварки. Далее, осуществляется калибровка акселерометра, направленная на определение его точностных параметров. С этой целью своей базирующей поверхностью 6 прибор устанавливается в различные пространственные положения. В случае получения искаженного выходного сигнала осуществляется доводка базирующей поверхности до достижения ортогональности к оси чувствительности акселерометра, путем механической обработки базирующей поверхности (например, шлифованием) до получения нужного угла наклона относительно свободной торцевой поверхности 28 (Фиг. 3, 5). Откалиброванный акселерометр крепится винтами через отверстия 26 базирующей поверхности 6 на крепежное приспособление подвижного объекта, например, летательного аппарата.
Работа акселерометра осуществляется следующим образом.
При движении акселерометра с ускорением на подвижную часть 8 маятника чувствительного элемента действует сила, вызывающая перемещения маятника относительно корпусов 10 и 11. Это перемещение преобразуется датчиком перемещения в электрический сигнал, который усиливается усилителем обратной связи и поступает на последовательно соединенные сопротивление нагрузки и датчик силы. Последний создает компенсирующую силу, приложенную к массе маятника и возвращает его в исходное положение. Выходным сигналом акселерометра является падение напряжения на сопротивлении нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2291450C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543708C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 1999 |
|
RU2155964C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2021 |
|
RU2758892C1 |
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2485524C2 |
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2441246C1 |
| АКСЕЛЕРОМЕТР | 1985 |
|
RU2045761C1 |
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2441247C1 |
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2020 |
|
RU2795114C2 |
| АКСЕЛЕРОМЕТР | 1986 |
|
RU2085954C1 |
Изобретение относится к области точного приборостроения. Маятниковый акселерометр содержит герметичный корпус в виде двух цилиндров разного диаметра, сопряженных посредством конической сопрягающей поверхности, на которой расположены вертикально ориентированные гермовводы, при этом базирующая поверхность корпуса выполнена на торцевой части большего цилиндра, внутри корпуса размещен маятник из аморфного кварца, на подвижной части которого расположены последовательно соединенные катушки датчика силы и электроды дифференциального датчика перемещения, а неподвижная часть зажата между двумя идентичными корпусами из токопроводящего материала с низким коэффициентом температурного расширения, каждый из которых является частью магнитной системы датчика силы и электродом дифференциального датчика перемещения. Технический результат – повышение точности акселерометра при одновременном упрощении процесса его сборки и монтажа на рабочую поверхность подвижного объекта. 6 ил.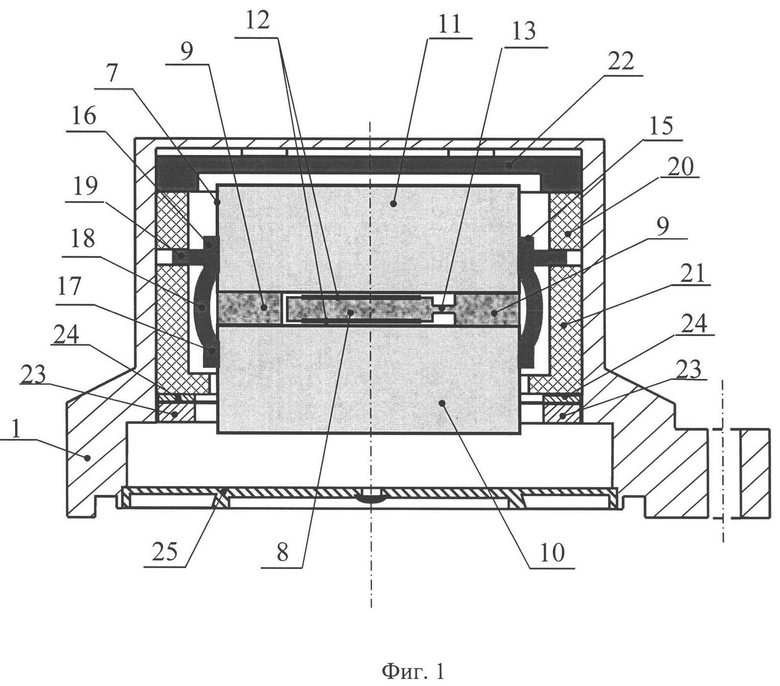
Маятниковый акселерометр, характеризующийся тем, что имеет герметичный корпус в виде двух цилиндров разного диаметра, сопряженных посредством конической сопрягающей поверхности, на которой расположены вертикально ориентированные гермовводы, при этом базирующая поверхность корпуса выполнена на торцевой части большего цилиндра, внутри корпуса размещен маятник из аморфного кварца, на подвижной части которого расположены последовательно соединенные катушки датчика силы и электроды дифференциального датчика перемещения, а неподвижная часть зажата между двумя идентичными корпусами из токопроводящего материала с низким коэффициентом температурного расширения, каждый из которых является частью магнитной системы датчика силы и электродом дифференциального датчика перемещения, при этом корпуса чувствительного элемента соединены между собой с помощью упругого элемента, а сам чувствительный элемент установлен в корпусе акселерометра на плоской пружине при помощи двух диэлектрических опорных элементов, при этом упругий элемент, соединяющий корпуса чувствительного элемента, имеет кольцевую поверхность, центральная часть которой выполнена в виде единичной гофры, а также примыкающие к ней цилиндрические части, одна из которых снабжена кольцевым выступом, наружный диаметр которого больше максимального диаметра выпуклой поверхности единичной гофры, при этом температурные коэффициенты линейного расширения материала корпусов чувствительного элемента и материала упругого элемента одинаковы, причем один из упомянутых опорных элементов является промежуточным между плоской пружиной и кольцевым выступом упругого элемента, а другой является промежуточным между фиксирующим элементом и упомянутым кольцевым выступом.
| Глубинный репер | 1955 |
|
SU104320A1 |
| АКСЕЛЕРОМЕТР | 2006 |
|
RU2307359C1 |
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |
| WO 1990013037 A1, 01.11.1990. | |||

