Изобретение относится к области приборостроения, а именно к конструкциям маятниковых компенсационных акселерометров.
Известны конструкции маятниковых компенсационных акселерометров, содержащие маятниковый узел, выполненный из плавленого кварца. Маятниковый узел содержит неподвижную рамку со сформированными на ее противоположных поверхностях установочными платиками и лопасть, укрепленную в рамке посредством упругих балок подвеса. На поверхности лопасти напылены электроды емкостного датчика угла и укреплены катушки компенсационного датчика момента. Токоподводы от размещенных на рамке контактных площадок к размещенным на лопасти электродам емкостного датчика угла и катушкам компенсационного датчика момента выполнены путем напыления металлических проводников на поверхность балок подвеса. Маятниковый узел укреплен между магнитными системами компенсационного датчика, одновременно выполняющими функцию неподвижных электродов емкостного датчика угла. Установочные платики, выполненные на рамке, формируют рабочие зазоры емкостного датчика угла и плоскости газового демпфера (см., например, патент США по М. Кл G01p 15/08 №3,680,393 за 1972 г.)
Недостатком известной конструкции маятникового компенсационного акселерометра является наличие погрешностей, связанных с деформацией упругих балок подвеса напыленными на их поверхность, обычно золотыми, токоподводами из-за большой разности температурных коэффициентов линейного расширения (ТКЛР) (для кварца ТКЛР ~0,5 ppm/°С, для токоподводов ~14 ppm/°С) материалов балок подвеса и токоподводов.
Известна конструкция маятникового компенсационного акселерометра, аналогичная описанной выше, в которой упругие балки подвеса имеют продольные канавки, глубина которых равна половине толщины балок плюс половина толщины токоподводов. Токоподводы напылены на дно канавок и их среднее сечение находится в нейтральном слое упругих балок подвеса (см., например, патенты США №4,399,700 G01P 15/13 за 1981 г. и №4,400,979 G01P 15/13 за 1981 г.). Благодаря этому существенно снижено влияние разности температурных коэффициентов линейного расширения материалов балок подвеса и токоподводов.
Недостатком конструкции является наличие погрешностей, связанных с рассмотренными выше деформациями балок из-за разницы температурных коэффициентов материалов балок подвеса и токоподводов. Эти погрешности в конструкции по патенту США №6,422,076 В1 от 2002 г. существенно меньше, чем в конструкции по патенту США №3,680,393, но все еще остаются заметными. Указанные конструкции по патентам США являются аналогами данного изобретения.
В конструкции маятникового компенсационного акселерометра (например, по патенту США М. Кл G01p 15/08 №6,422,076 за 2002 г.), в которой используется свободные токоподводы от контактных площадок на рамке к элементам, укрепленным на лопасти, отсутствует погрешность из-за деформаций упругих балок подвеса металлом напыленных токоподводов, однако монтаж токоподводов осуществляется вручную квалифицированным сборщиком, что усложняет изготовление маятникового узла и увеличивает его стоимость.
Известна конструкция маятникового компенсационного акселерометра, в которой используются свободные плоские балки токоподводов от контактных площадок на рамке к элементам, укрепленным на лопасти. Нейтральные плоскости балок токоподводов при этом совпадают с нейтральной плоскостью упругих балок подвеса. Балко токоподводов выполняются путем напыления металла на поверхности впоследствии удаляемого жертвенного слоя, расположенного между упругими балками подвеса лопасти (например, по Заявке на изобретение «Маятниковый компенсационный акселерометр» от 15.03.2019 г., регистрационнный №2019107343/28-014065). Эта конструкция выбрана в качестве прототипа изобретения. В указанной конструкции маятникового компенсационного акселерометра из-за разницы температуры металла в процессе его напыления (обычно от +120°С до +200°С) на поверхность впоследствии удаляемого жертвенного слоя и температуры эксплуатации прибора (от минус 60°С до +80°С), а также из-за различия температурных коэффициентов напыляемого металла (меди или золота) свободные токоподводы после удаления жертвенного слоя оказываются растянутыми. Это, с одной стороны, хорошо, так как исключается провисание свободного токоподвода. Однако, с другой стороны, усилие растяжения токоподводов оказывается приложенным к лопасти и может вызвать погрешность акселерометра (например, создавая изменяющуюся при изменении температуры прибора отрицательную жесткость, уменьшающую жесткость упругих балок подвеса). Кроме того, в ряде случаев свободные токоподводы могут получать остаточные пластические деформации и даже разрушаться.
Целью изобретения является устранение указанных недостатков известных конструкций. Поставленная цель достигается выполнением токоподводов маятникового узла в виде ступенчатых свободных балок, размещенных параллельно балкам упругого подвеса и прикрепленных к плоскому неподвижному элементу крепления, выполненному, например, в виде рамки, и к лопасти маятника. Сущность изобретения поясняется чертежами маятникового узла акселерометра, изображенного на фиг. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 14, 15 и акселерометра, показанного на фиг. 12 и 13.
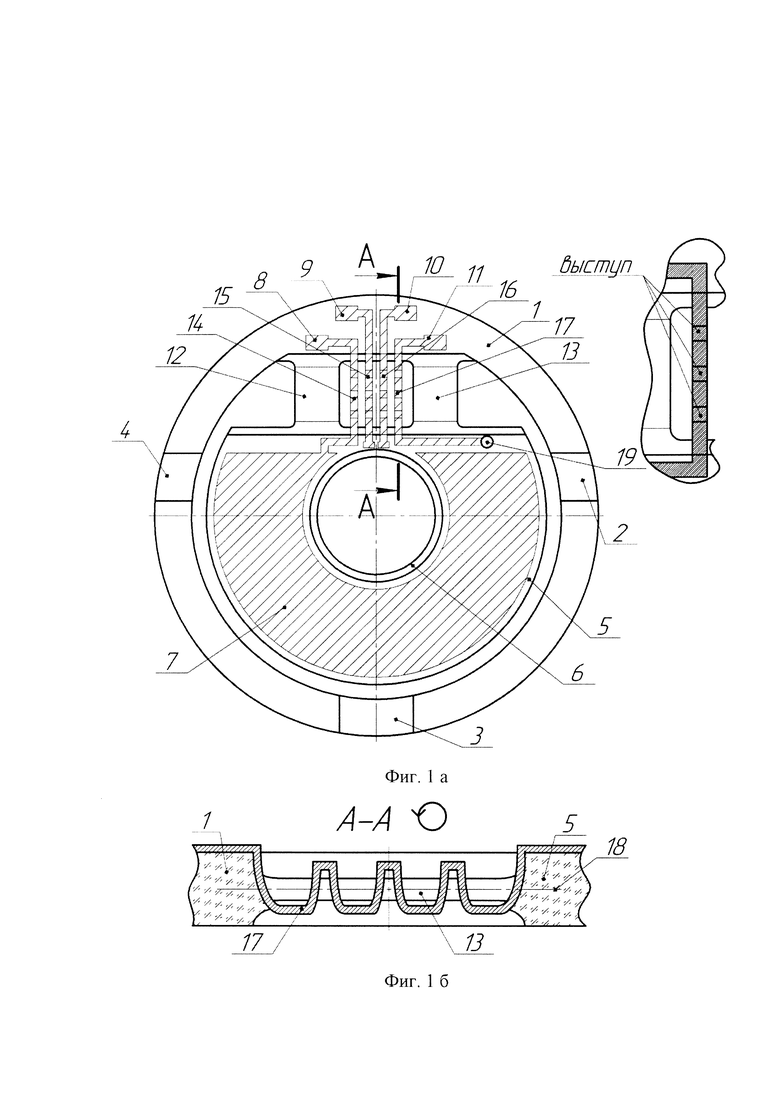
На фиг. 1 а, б изображен вариант конструкции маятникового узла, в котором балки подвеса лопасти маятника свободны от напыленных на их поверхность металлических токоподводов, благодаря чему не возникает деформация балок подвеса из-за разницы температурных коэффициентов линейного расширения материала балок подвеса и металла токоподводов. Это в свою очередь способствует повышению точности акселерометра. При этом на представленной конструкции маятникового узла токоподводы от контактных площадок, выполненных на поверхности неподвижного элемента, к катушкам компенсационного датчика силы и подвижным электродам емкостного датчика угла выполнены в виде ступенчатых балок с плоскими вершинами выступов и плоскими донными участками ступеней.
В конструкции маятникового узла, изображенной на фиг. 1 а, б, выводы от балок свободных ступенчатых токоподводов выходят на одну (в примере - верхнюю) сторону маятникового узла. При необходимости электрические соединения с элементами на задней поверхности маятника (вторым подвижным электродом емкостного датчика угла и со второй катушкой датчика момента) могут осуществляться, например, через отверстие в лопасти маятника, или с помощью свободных ступенчатых балок токоподводов, выведенных на вторую (заднюю) поверхность маятникового узла. На Фигурах обозначено: 1 - плоский неподвижный элемент крепления маятника, для примера, выполненный в виде рамки, с установочными платиками (2, 3, 4); 5 - лопасть маятника; 6 - катушка моментного датчика; 7 - подвижный электрод емкостного датчика угла; 8, 9, 10, 11 - контактные площадки; 12, 13 - упругие балки подвеса; 14, 15, 16, 17 - свободные ступенчатые балки токоподводов; 18 - нейтральная плоскость упругих балок подвеса; 19 - отверстие в лопасти маятника. На фиг. 1 б, сечение А-А, показан вид описываемого ступенчатого свободного токоподвода.
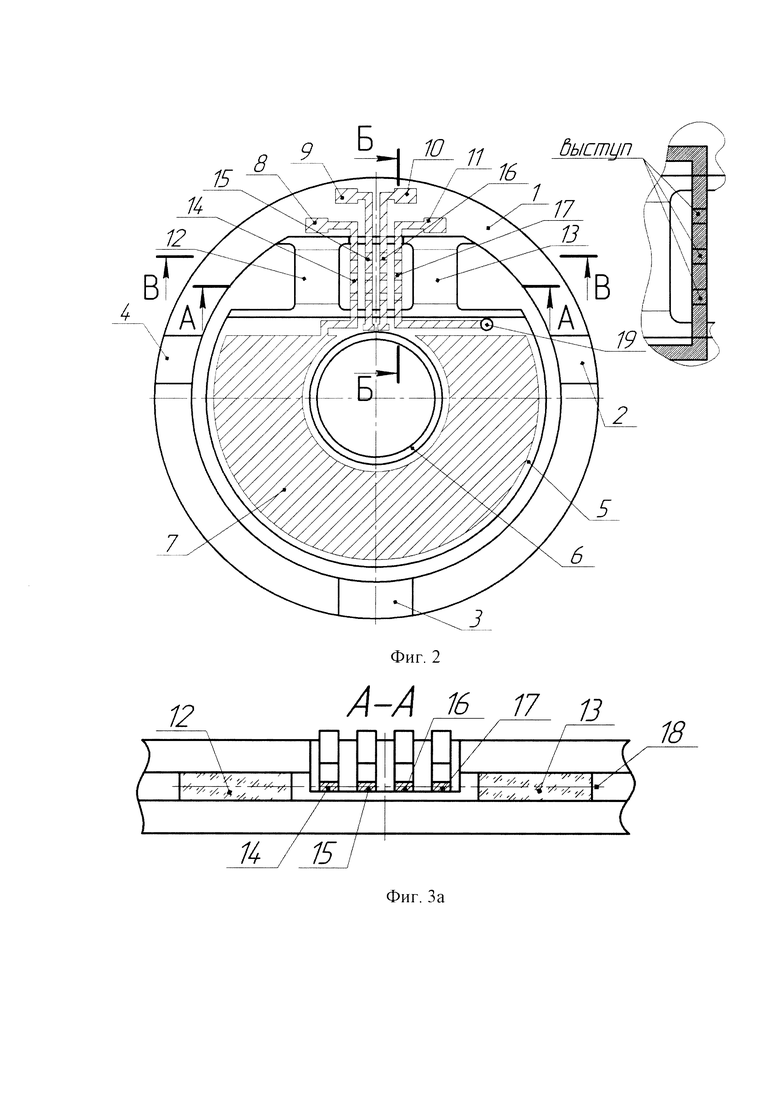
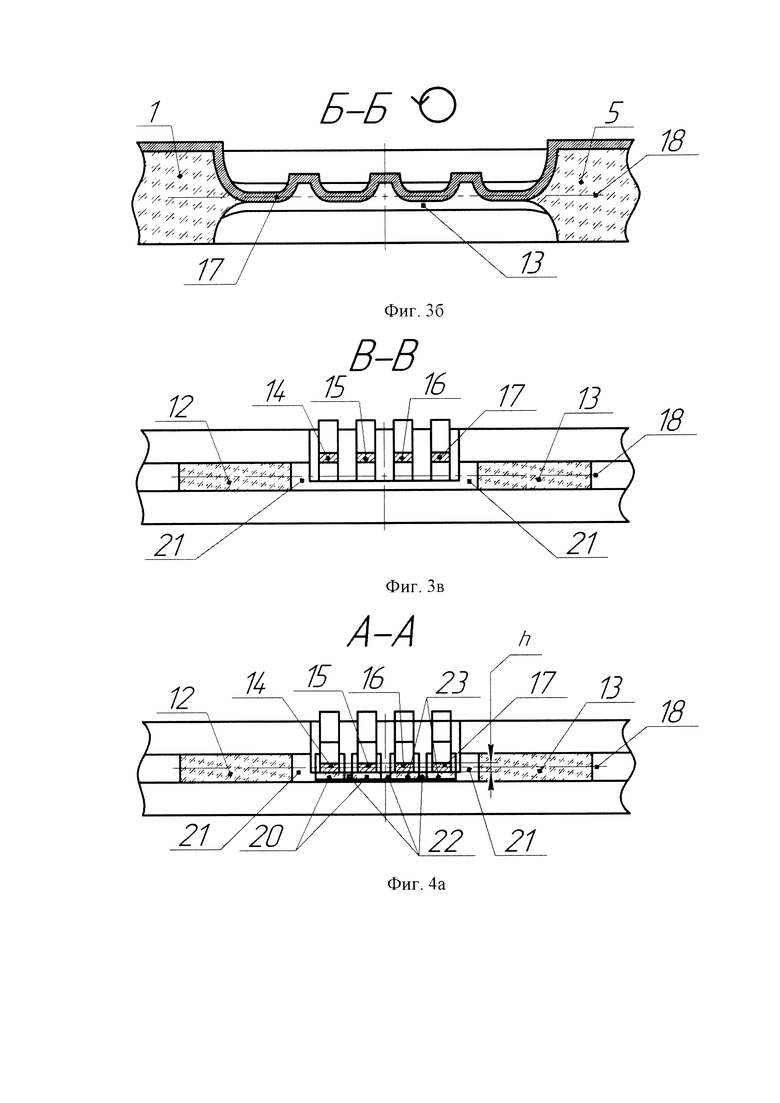
На фиг. 2, 3 а, б, в и 4 а, б, в изображен вариант конструкции маятникового узла, в котором выводы от балок токоподводов выходят также на одну (верхнюю) сторону маятника. Сечение А-А, фиг. 3 а, проходит через впадины ступенчатых свободных токоподводов, сечение В-В, фиг. 3 в, проходит через их выступы. На Фигурах использованы те же обозначения элементов, что и на фиг. 1.
В конструкции маятникового узла, изображенной на фиг. 2 и 3 а, б, в балки подвеса лопасти также свободны от напыленных на их поверхность металлических токоподводов, а сами токоподводы также выполнены в виде ступенчатых балок с плоскими вершинами выступов и плоскими донными участками ступеней. На фиг. 4 а, б и в показаны сечения А-А, Б-Б и В-В конструкции маятникового узла по фиг. 2, при наличии впоследствии удаляемого жертвенного слоя. Сечение Б-Б показано частично и в увеличенном масштабе. Здесь дополнительно обозначено: 20 - технологические балки впоследствии удаляемого жертвенного слоя, связывающие рамку 1 и лопасть 5, отделенные от упругих перемычек подвеса и между собой щелями 21, 22. Особенность конструкции маятникового узла по фиг. 2 в том, что поверхность технологической балки впоследствии удаляемого жертвенного слоя, на которую напыляется металл токоподвода, на участке впадин смещена относительно нейтральной плоскости балок подвеса 12, 13 на расстояние, равное половине толщины h напыляемого на этот жертвенный слой металла токоподвода. На участках выступов поверхность технологической балки жертвенного слоя совпадает с верхней (лицевой) плоскостью балок упругого подвеса. Для удобства последующего удаления жертвенного слоя технологические балки жертвенного слоя выполняются одинаковой толщины по всей длине и профилю ступенчатого токоподвода. После напыления металла на лицевую поверхность (например, через отверстия в маске) или формирования токоподводов из сплошного слоя металла методами фотолитографии и травления технологические балки 20 убирают, например, плазменным травлением. Ступенчатые балки токоподводов при этом освобождаются. Данная конструкция токоподводов соответствует п. 2 формулы изобретения.
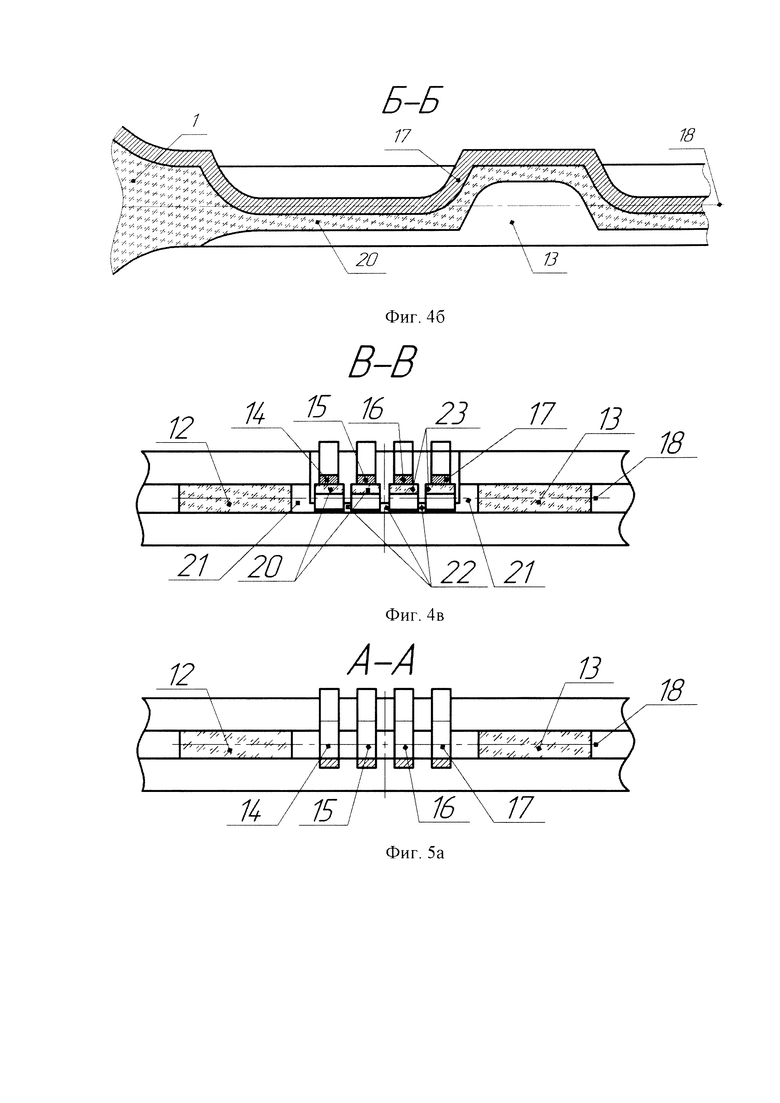
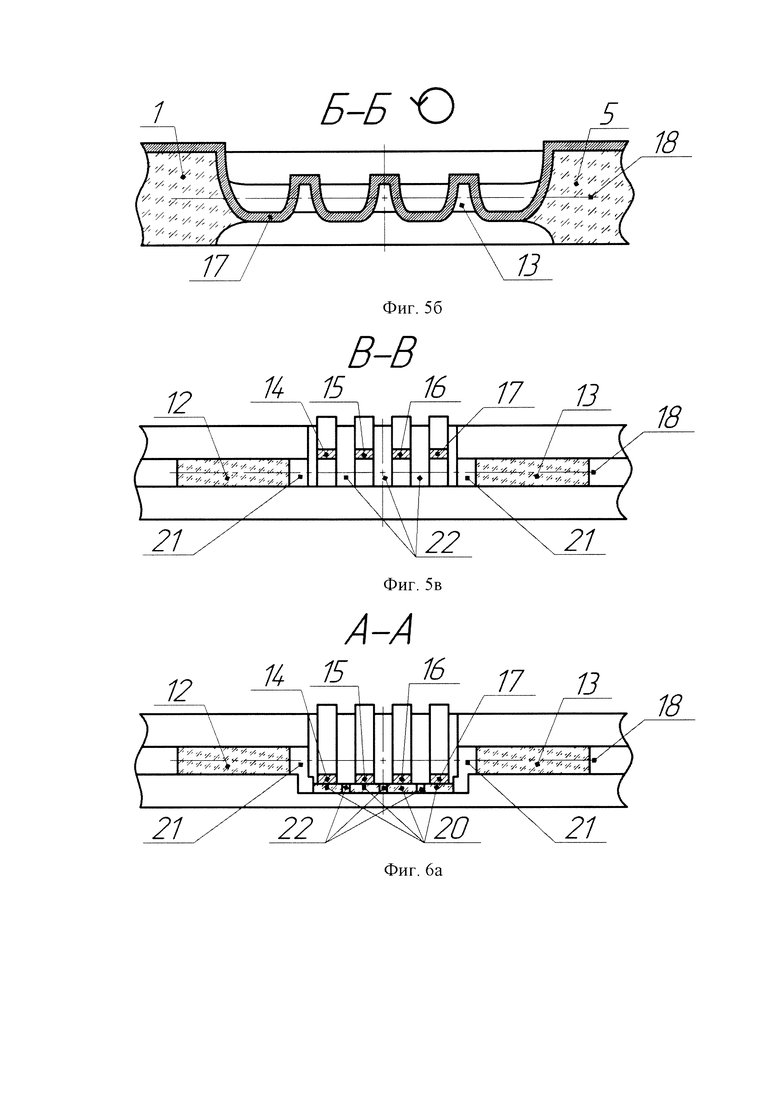
Особенностью ступенчатых токоподводов, изображенных на фиг. 3 а, б, в и 4 а, б, в маятникового узла акселерометра является возможность применения технологии одностороннего напыления металла на впоследствии удаляемый жертвенный слой. Вариант с односторонним напылением ступенчатых токоподводов проще, чем с двусторонним, но имеет недостатки, заключающиеся в том, что балки ступенчатых токоподводов несимметрично расположены относительно нейтральной плоскости 18 балок и имеется смещение средней линии ступеней этих свободных ступенчатых токоподводов в одну (на изображенных сечениях - в верхнюю) сторону относительно нейтральной плоскости 18 балок 12 и 13 подвеса маятника. Данная несимметричность конструкции свободных токоподводов может приводить к возникновению упругих сил и моментов, действующих на лопасть маятника 5, что может вызвать погрешность акселерометра. Для исключения указанных ошибок прибора интересен другой вариант конструкции маятникового узла (по фиг. 2, 5 а, б, в и 6 а, б), соответствующий п. 3 формулы изобретения. Общий вид этого варианта конструкции маятникового угла со свободными ступенчатыми токоподводами поясняется также фиг. 2. При этом сечения А-А, Б-Б, В-В токоподводов и балок упругого подвеса маятника отличаются от конструкций по фиг. 3 а, б, в, 4 а, б, в и соответствуют изображениям по фиг. 5 а, б, в и 6 а, б. В данном варианте конструкции маятникового узла поверхность технологической балки 20 жертвенного слоя, на которую напыляется металл токоподвода, на участке впадин смещена относительно нижней (задней) наружной поверхности балок подвеса на расстояние, равное толщине напыляемого металла. На участках выступов поверхность технологической балки жертвенного слоя при этом совпадает с верхней (лицевой) плоскостью балок упругого подвеса. После напыления металла на лицевую поверхность (например, через отверстия в маске) или формирования токоподводов из сплошного слоя металла методами фотолитографии и травления технологические балки убирают, например, плазменным травлением. Ступенчатые балки токоподводов освобождаются, и средняя плоскость полученных гофр остается совмещенной с нейтральной плоскостью 18 балок подвеса.
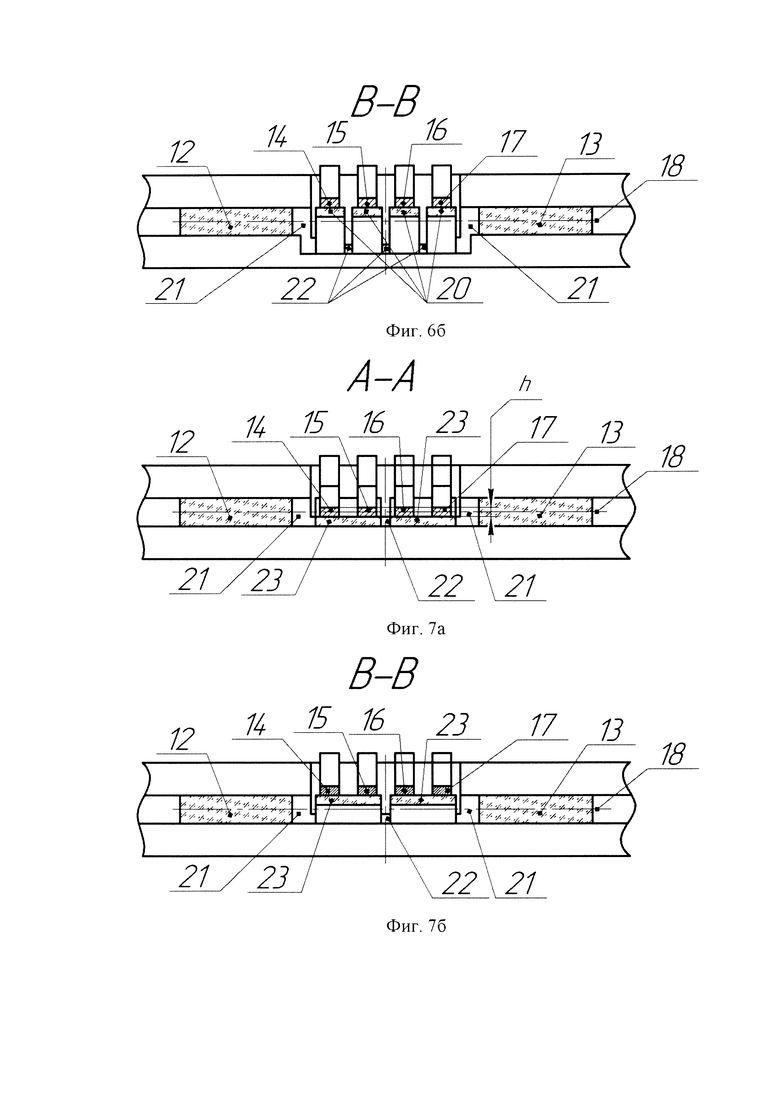
Необходимо отметить, что исполнение технологических балок жертвенного слоя как первого (балки не были показаны), так второго и третьего вариантов конструкций маятникового узла может быть различно. К примеру, на фиг. 4 а, б, в и 6 а, б представлены балки жертвенного слоя, выполненные в виде равных по количеству токоподводов участков - по одному токоподводу на каждой балке жертвенного слоя. По технологическим или иным причинам исполнение балок жертвенного слоя конструкций маятникового узла может быть изменено и соответствовать, к примеру, изображениям по фиг. 7 а, б. На фиг. 7 а, б показаны изображения сечений А-А и В-В с фиг. 2 с измененными технологическими балками жертвенного слоя, в качестве примера, для второго варианта конструкции маятникового узла со свободными ступенчатыми токоподводами. На фиг. 7 а, б дополнительно обозначены: 23 - технологические балки впоследствии удаляемого жертвенного слоя, связывающие рамку 1 и лопасть 5, разделенные на равные участки по количеству токоподводов и отделенные от упругих балок подвеса маятника и между собой щелями 21, 22. Необходимость выполнения в жертвенном слое сквозных щелей объясняется опасностью появления трещин, формирующихся в балках ступенчатых токоподводов на конечном этапе разрушения жертвенного слоя при его стравливании. Описание данных изменений конструкции соответствует п. 4 формулы изобретения.
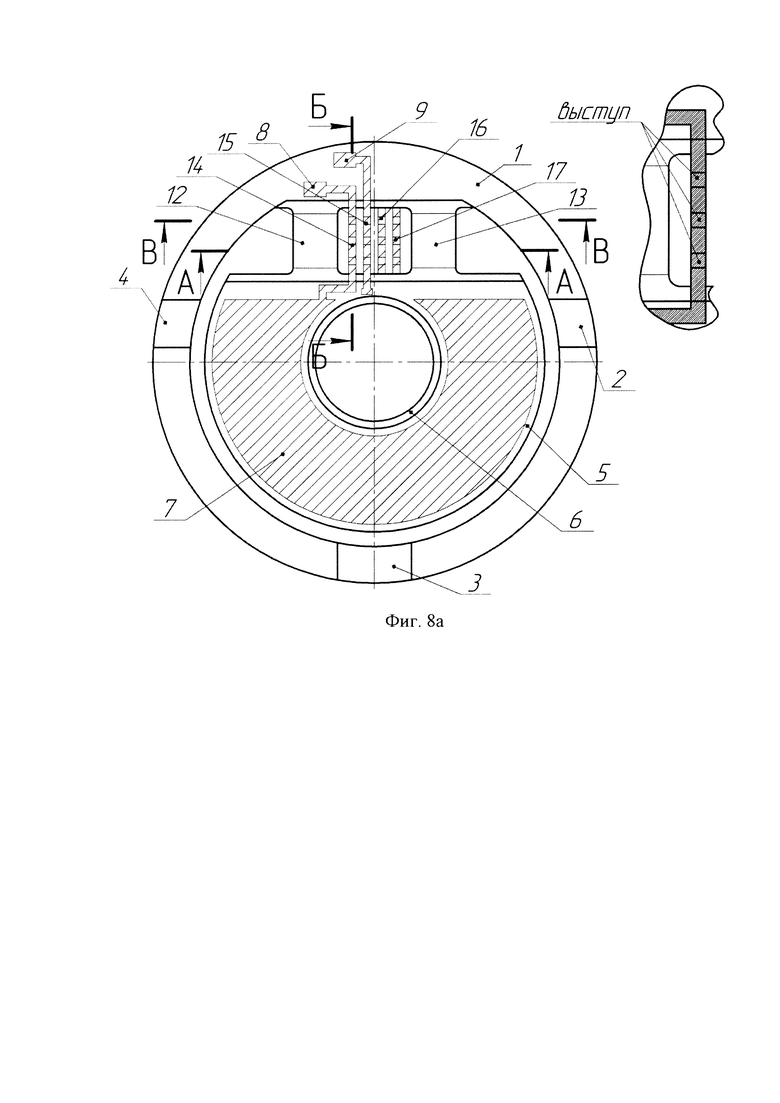
Необходимо отметить, что при фотолитографии и изотропном травлении ступеней токоподводов участки выступов и впадин (фиг.1 б, 3 б и 5 б) получаются неравными. При этом снижения влияния свободных токоподводов на положение лопасти маятника и снижения ошибки акселерометра возможно добиться только либо при точной симметрии расположения и конструкции токоподводов, что технологически затруднительно, либо используя четное число токоподводов и чередование верхних и нижних сторон впоследствии удаляемого жертвенного слоя, открытых для напыления металла токоподвода. Вариант конструкции маятникового узла с четным числом токоподводов и с использованием чередования верхних и нижних сторон впоследствии удаляемого жертвенного слоя поясняется на фиг. 8 а, б, 9 а, б, в, г, д, 10 а, б, в, г, д и соответствует п. 5 формулы изобретения.
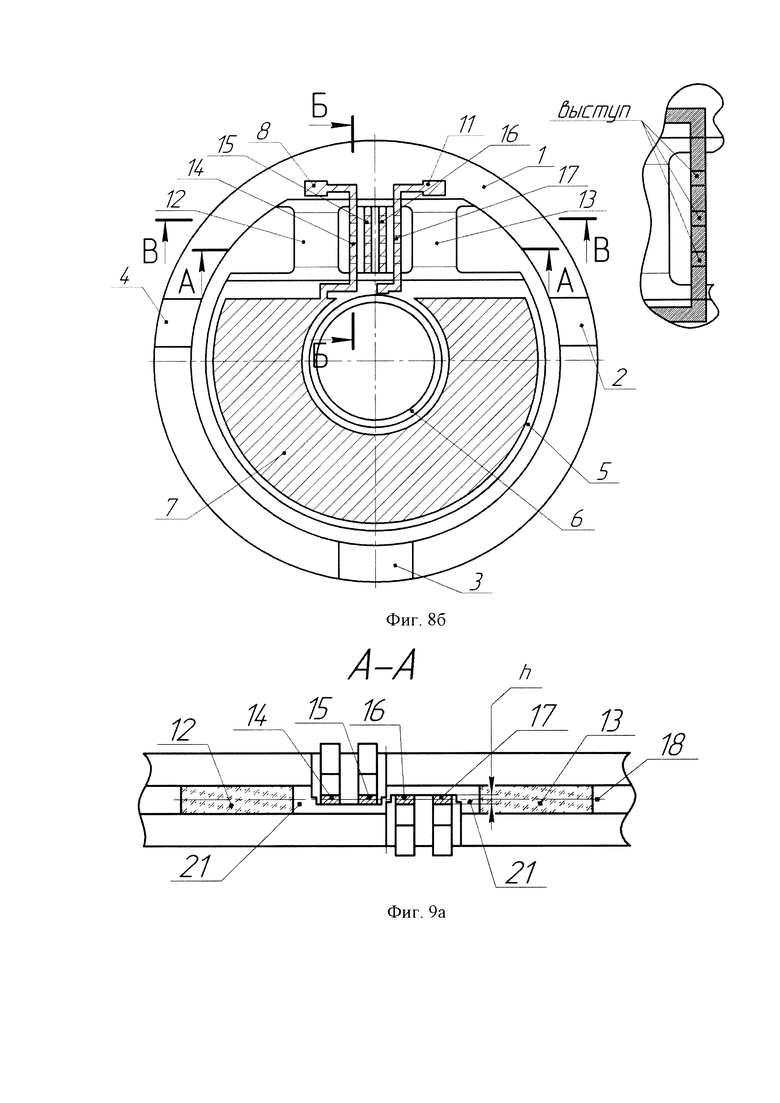
На фиг. 8 а и б представлены общие виды двух маятниковых узлов, в которых имеется чередование верхних и нижних сторон жертвенного слоя, открытых для напыления. На фиг. 8 а показан маятниковый узел, на котором токоподводы 14 и 15 выполнены с лицевой (верхней) стороны пластины и жертвенного слоя, например, путем напыления металла на жертвенный слой или с помощью методов фотолитографии из сплошного слоя металла, а токоподводы 16 и 17 выполнены подобными же методами с задней (нижней) стороны пластины и жертвенного слоя. Сечения А-А, Б-Б, В-В, полученные на фиг. 8 а, без впоследствии удаляемого жертвенного слоя и вместе с ним показаны на фиг. 9 а, б, в и 9 г, д соответственно.
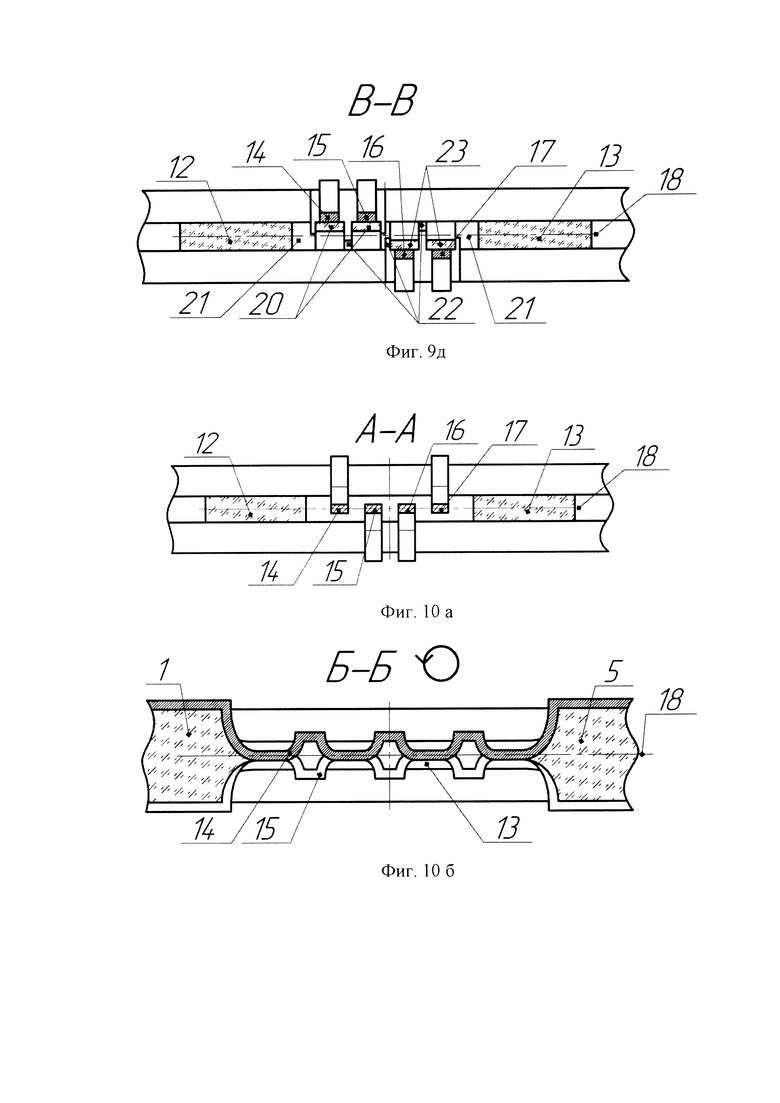
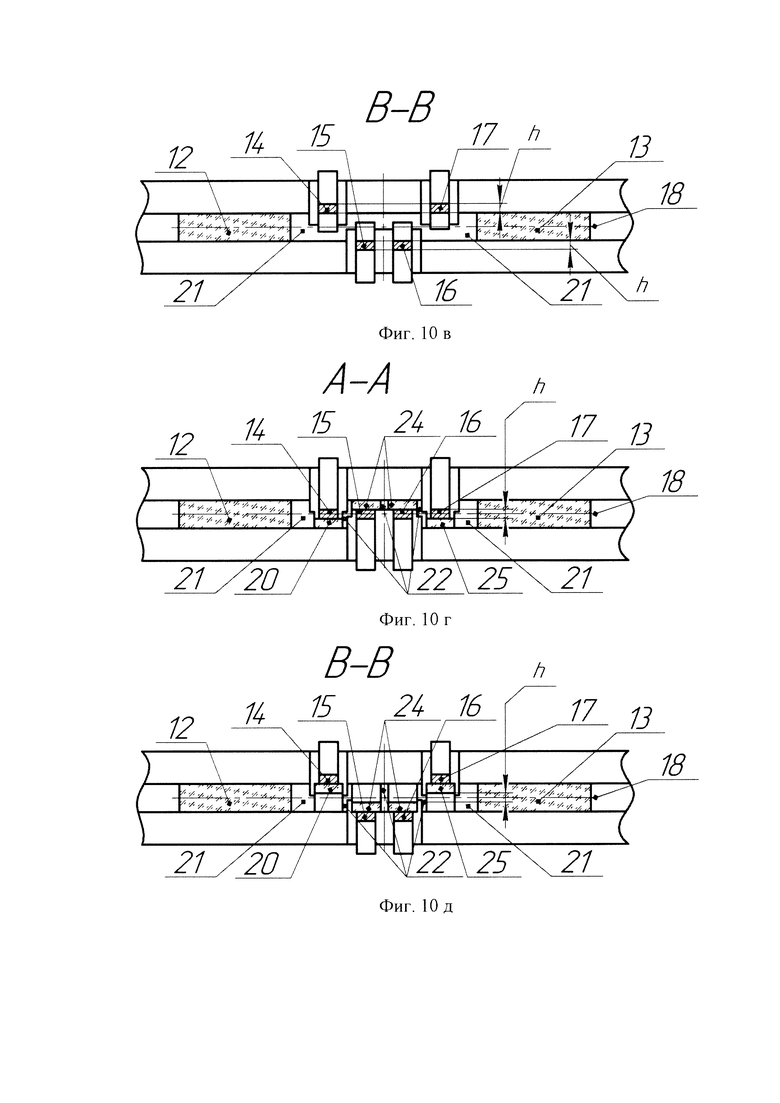
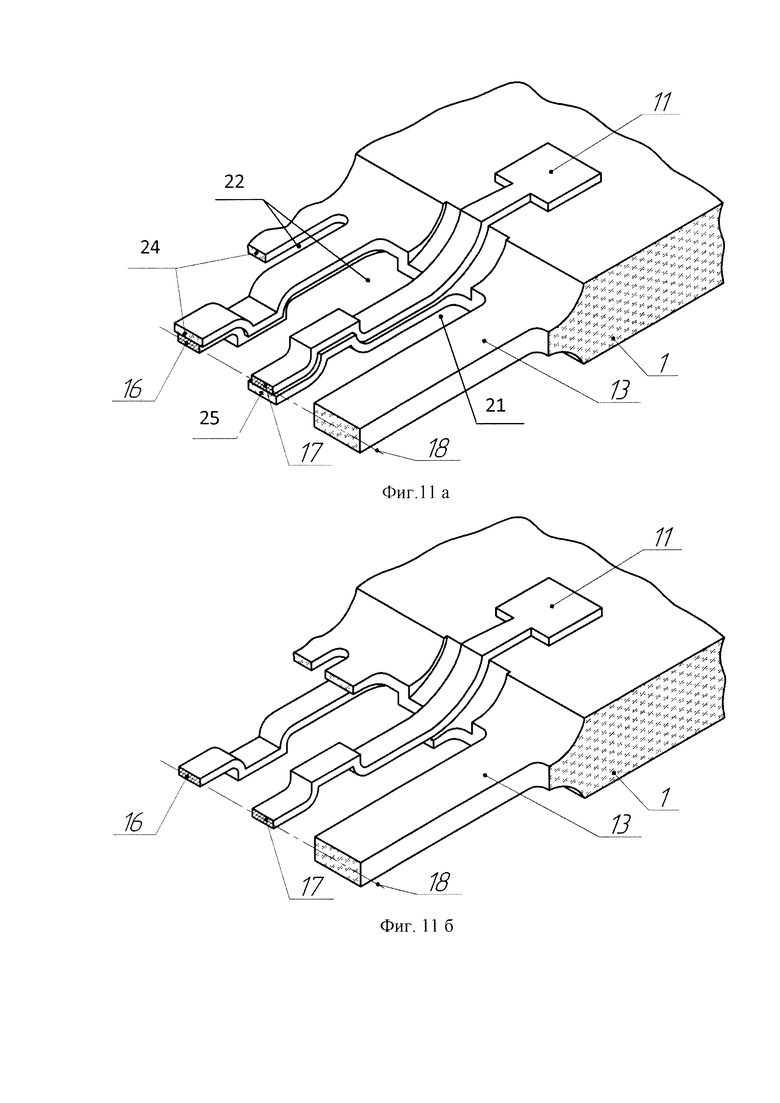
На фиг. 8 б представлен маятниковый узел, в котором также имеется чередование сторон жертвенного слоя и токоподоводы 14 и 17 изготовлены на верхней стороне пластины и впоследствии удаляемого жертвенного слоя, а токоподводы 15 и 16 - на нижней стороне пластины и балок жертвенного слоя. Сечения А-А, Б-Б, В-В, полученные на фиг. 8 б, без впоследствии удаляемого жертвенного слоя и вместе с ним показаны на фиг. 10 а, б, в и 10 г, д, соответственно. На фигурах дополнительно обозначены: 24 и 25 - чередующиеся впоследствии удаляемые жертвенные слои, выполненные в виде равных участков по числу токоподводов и разделенные между собой и отделенные от балок упругого подвеса сквозными прорезями 21, 22.
Показанная на фигурах 8 а, б конструкция токоподводов (положение поверхностей впоследствии удаляемого жертвенного слоя) для примера соответствует второму варианту конструкции маятникового узла со свободными ступенчатыми токоподводами.
Пример изготовления токоподводов 14 и 16, к примеру, с верхней стороны пластины и жертвенного слоя, к примеру, напылением металла, а токоподводов 15 и 17 - с нижней стороны пластины и жертвенного слоя (конструкция по рис. 8 б) показан изометрически на фиг. 11 а вместе с впоследствии удаляемым жертвенными слоями 20, 24 и 25 и на фиг. 11 б без жертвенных слоев 20, 24 и 25. Общее количество токоподводов на представленных маятниковых узлах, фиг. 8 а, б, четное и равняется 4.
Конструкция акселерометра и описание его работы
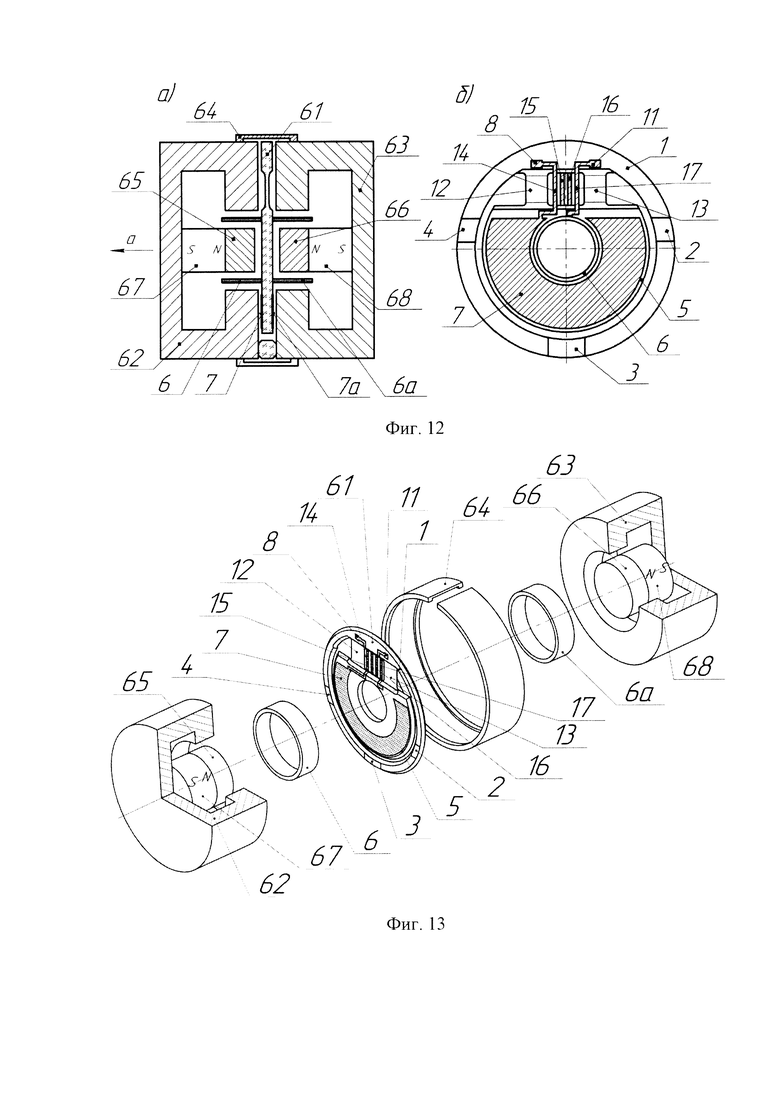
Конструкция акселерометра, содержащая маятниковый узел 61 со свободными ступенчатыми токоподводами, соответствующими пунктам 1, 2, 3, 4, 5 формулы изобретения, показана на Фиг. 12 а. На Фиг. 12 б, к примеру, изображен маятник у которого имеются две упругих балки 12, 13 и четыре свободных ступенчатых токоподвода 14, 15, 16, 17. На лопасти маятника укреплены две последовательно соединенные катушки дифференциального плунжерного датчика момента 6 и 6а (Фиг. 12 а). Кроме того на подвижных лопастях напылены электроды 7 и 7а датчика угла. Выводы от катушек и электродов подсоединены к свободным ступенчатым токоподводам, заканчивающимся контактными площадками 8, 11 и 9, 10 (на обратной стороне рамки), Фиг. 12 б. Маятниковый узел 61 по платикам неподвижного элемента крепления, выполненного для примера в виде рамки, зажат между двумя магнитными системами 62, 63, механически и электрически соединенными между собой с помощью разрезного соединительного кольца 64. Корпуса магнитопроводов выполняют функцию неподвижных электродов датчика угла. Катушки 6 и 6а входят в кольцевые зазоры магнитных систем, образованными магнитопроводами и полюсными наконечниками 65, 66, смонтированными на торцах постоянных магнитов 67, 68. Контактные площадки 8, 9, 10, 11 подсоединены к усилителю (на рисунках не показан), который усиливает и преобразует в постоянный ток J в катушках 6, 6а сигнал емкостного датчика угла, возникающий при отклонении маятника под действием инерционного момента mla, где m, l - масса и плечо подвижной лопасти маятника с катушками, а а - измеряемое ускорение. Ток в катушках 6, 6а вызывает появление компенсационного момента KДСJl1 в статическом равновесии равному mla, где KДС и l1 - передаточный коэффициент дифференциального датчика силы и плечо прилагаемой компенсационной силы. Отсюда величина тока равна
Так как обычно l=l1, то
Измеряя величину тока (или падение напряжения на включенном последовательно с катушками эталонном сопротивлении), определяют величину а.
На Фиг. 13 показана изометрия маятникового акселерометра. Маятниковый узел соответствует пункту 1 или 2 или 3 или 4 или 5 формулы изобретения. В изображенной конструкции может быть использован также недифференциальный компенсационный датчик (с одной катушкой и магнитной системой, к примеру 6а и 63, соответственно). Балансировка лопасти маятника (совмещение центра масс лопасти с плоскостью, проходящей через нейтральное сечение балок подвеса) в данном случае осуществляется посредством противовеса, используемого вместо катушки 6. Вместо магнитной системы 62, магнита 67 и полюсного наконечника может быть установлен имитатор. На маятниковом узле 61 напылены подвижные электроды 7 и 7а емкостного датчика угла. Неподвижные электроды датчика угла образованы один - металлическим корпусом магнитной системы 63, второй - корпусом магнитной системы 62 (или имитатором корпуса магнитной системы) или напылением на поверхность ответной части 62 и 63 изоляционного материала и слоя металла. Акселерометр, изображенный на Фиг. 13, работает аналогично изображенному на Фиг. 12 акселерометру.
Во всех рассмотренных конструкциях маятникового компенсационного акселерометра маятниковый узел не содержит упругих балок подвеса с напыленными на их поверхность токоподводами, благодаря чему исключаются погрешности акселерометра, связанные с деформациями балок упругого подвеса, вызванные различием температурных коэффициентов расширения материалов упругих балок подвеса (например, кварца) и металла токоподводов (например, золота). Наличие ступеней (выступов и впадин) у свободных ступенчатых токоподводов благодаря наличию перпендикулярных к нейтральной плоскости упругого подвеса участков, изгибно деформирующихся под действием растягивающих токоподводы усилий, вызванных разницей рабочей температуры прибора и температурой металла токоподвода в процессе его напыления на впоследствии удаляемый жертвенный слой, а также разницей температурных коэффициентов плавленого кварца и металла токоподводов, приводит к уменьшению растягивающих усилий в токоподводах и, следовательно, к повышению точности и надежности акселерометра.
Предлагаемая конструкция токоподводов маятникового узла может изготавливаться групповыми методами, не требующими использования для монтажа ручных операций, выполняемых высококвалифицированными механиками-сборщиками. Все это способствует повышению точности акселерометров, увеличению выхода годных приборов и удешевлению производства.
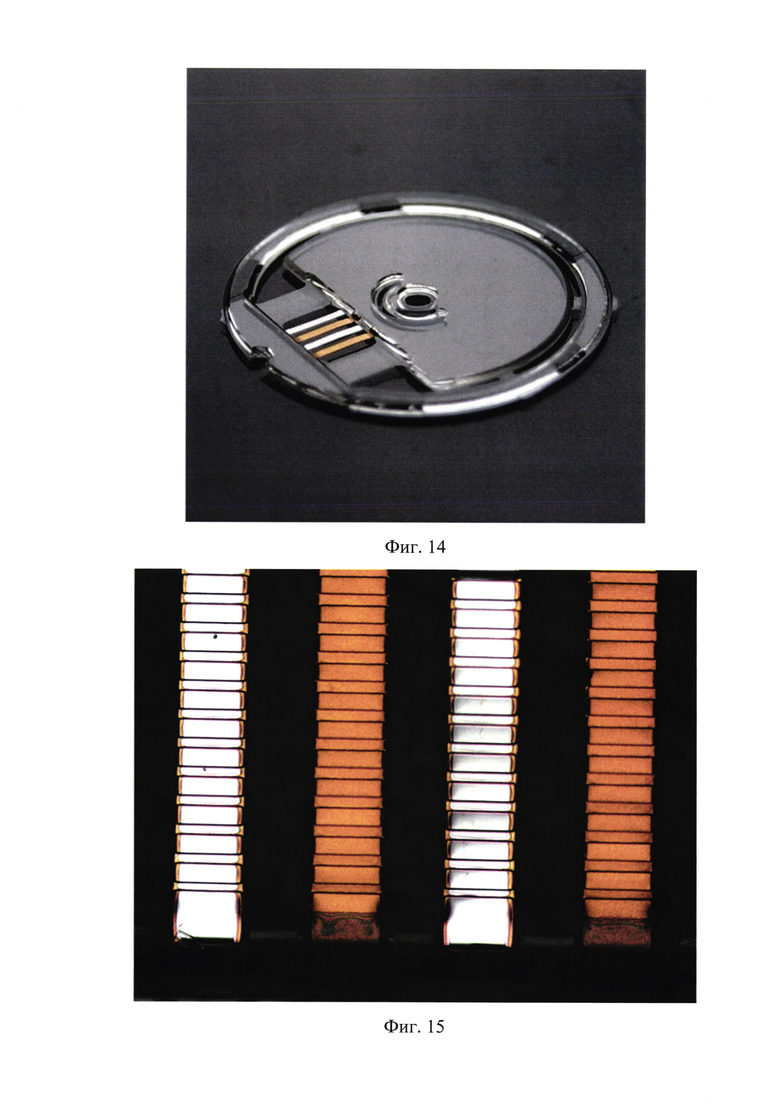
Фотографии изготовленных ступенчатых токоподводов приведены на Фиг. 14, 15. Испытания акселерометров, использующих описанные выше ступенчатые токоподводы, показали существенное улучшение стабильности нулевого сигнала акселерометра по сравнению с приборами, имеющими свободновисящие негофрированные токоподводы.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2019 |
|
RU2731652C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543708C1 |
| Компенсационный маятниковый акселерометр | 1989 |
|
SU1679395A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2291450C1 |
| Компенсационный акселерометр | 1982 |
|
SU1067445A1 |
| Акселерометр | 1980 |
|
SU901914A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 1999 |
|
RU2155964C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |

Изобретение относится к области приборостроения, а именно к конструкциям маятниковых компенсационных акселерометров. Сущность изобретения заключается в том, что маятниковый компенсационный акселерометр содержит балки упругого подвеса лопасти свободные от напыленных на их поверхность металлических токоподводов, а токоподводы от размещенных на рамке контактных площадок к размещенным на лопасти электродам емкостного датчика угла и катушкам компенсационного датчика момента выполнены в виде свободных ступенчатых балок, размещенных параллельно балкам упругого подвеса, с плоскими вершинами выступов и плоскими донными участками ступеней, параллельными плоскостям балок упругого подвеса маятника и отделенными друг от друга и от балок подвеса сквозными прорезями. Технический результат – повышение точности акселерометра. 4 з.п. ф-лы, 15 ил.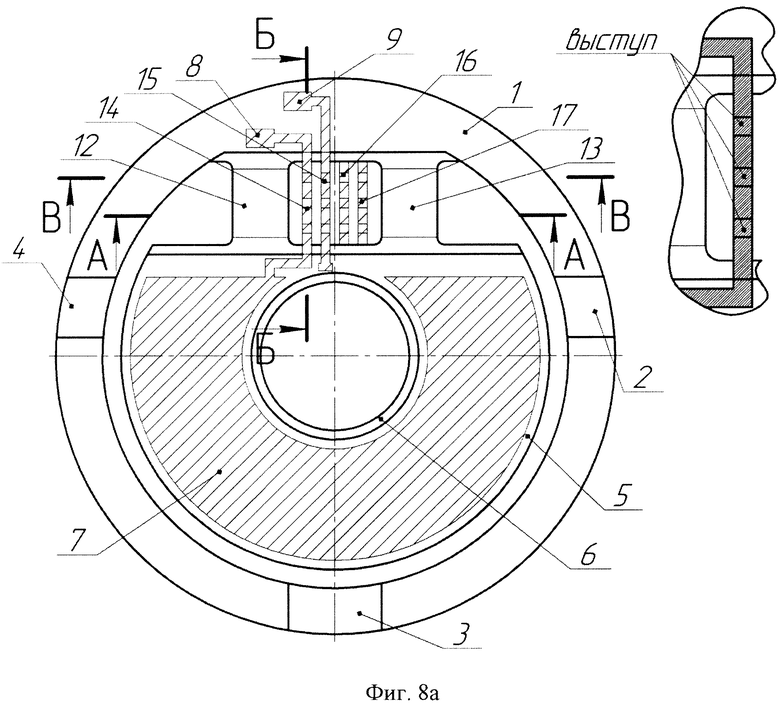
1. Маятниковый компенсационный акселерометр, включающий в свой состав электроды емкостного датчика угла, магнитную систему компенсационного датчика силы, плоский газовый демпфер, усилитель и маятниковый узел, выполненный, например, из плавленого кварца или монокристаллического кремния, и содержащий плоский неподвижный элемент крепления с расположенными по обе его стороны формирующими воздушные зазоры емкостного датчика угла и газового демпфера установочными платиками, прикрепленную к неподвижному элементу посредством плоских упругих балок подвеса подвижную плоскую лопасть с размещенными на ней катушками компенсационного датчика силы и подвижными электродами емкостного датчика угла и токоподводы от контактных площадок, выполненных на поверхности неподвижного элемента, к катушкам компенсационного датчика силы и подвижным электродам емкостного датчика угла, имеющие вид свободных балок, размещенных параллельно балкам упругого подвеса, прикрепленные к неподвижному элементу и лопасти маятникового узла и выполненные путем двустороннего напыления металла на поверхности подвижного элемента и лопасти, а также на плоские поверхности впоследствии удаляемого жертвенного слоя, параллельные плоскости нейтрального сечения балок упругого подвеса, отличающийся тем, что с целью повышения точности поверхности впоследствии удаляемого жертвенного слоя, открытые для напыления металла, выполняются ступенчатыми с плоскими вершинами выступов и плоскими донными участками ступеней, параллельными плоскостям балок упругого подвеса.
2. Маятниковый компенсационный акселерометр по п. 1, отличающийся тем, что плоскости выступов совпадают с верхней поверхностью упругой балки подвеса, плоскости донных участков ступеней расположены ниже нейтральной плоскости упругих балок подвеса на расстоянии, равном половине толщины металла токоподвода, напыляемого на впоследствии удаляемый жертвенный слой, а свободная от напыления металла нижняя сторона впоследствии удаляемого жертвенного слоя также выполняется ступенчатой таким образом, чтобы обеспечивалась постоянная толщина впоследствии удаляемого жертвенного слоя.
3. Маятниковый компенсационный акселерометр по пп. 1, 2, отличающийся тем, что плоскости донных участков ступеней расположены ниже нижней поверхности балок упругого подвеса на расстоянии, равном толщине напыляемого на впоследствии удаляемый жертвенный слой металла токоподвода.
4. Маятниковый компенсационный акселерометр по пп. 1-3, отличающийся тем, что впоследствии удаляемый жертвенный слой выполнен в виде равных по числу токоподводов участков, разделенных между собой и отделенных от упругих балок подвеса сквозными прорезями.
5. Маятниковый компенсационный акселерометр по пп. 1-4, отличающийся тем, что число токоподводов и участков жертвенного слоя выполняется четным, а верхние и нижние стороны жертвенного слоя, открытые для напыления, чередуются.
| US 6422076 B1, 23.07.2002 | |||
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2005 |
|
RU2284528C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2291450C1 |
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2441246C1 |
| US 7347097 B2, 25.03.2008. | |||

