Область техники, к которой относится изобретение
Настоящее изобретение в общем относится к системам опломбирования, а конкретно, к опломбированию контейнера для ядерных материалов с возможностью обнаружения несанкционированного вскрытия контейнера. При таком опломбировании крышка контейнера прикреплена к корпусу контейнера и может содержать средства для идентификации индивидуального контейнера. Изобретение также относится к способу установки системы опломбирования.
Уровень техники
В некоторых случаях необходимо обеспечить надежное опломбирование контейнеров. Данное требование имеет особое значение, в случае хранения в таких контейнерах опасных веществ, таких как ядерные материалы.
Например, инспекционный орган имеет желание удостовериться, что перемещение контейнера (емкости), содержащего отработавшее ядерное топливо, между двумя объектами происходило без его вскрытия. Транспортируемые контейнеры заполняются на объекте, перемещаются на грузовике, по железной дороге или водным транспортом на другой объект, и затем их вскрывают.
Обычно инспектор имеет доступ к контейнерам и крышкам на трех разных этапах: до их заполнения, во время перемещения и после вскрытия и опорожнения контейнера.
Желательно, чтобы контейнеры были заполнены под надзором, закрыты оператором и опломбированы оператором, и не требовалось бы присутствия инспектора из агентства во время операции наполнения/закрытия/ опломбирования. Опломбирование должно быть выполнено оператором таким образом, чтобы (i) избежать преднамеренной/непреднамеренной ненадлежащей установки, что повлечет за собой нарушение/изменение правильного функционирования пломбы, (ii) иметь однозначное соответствие контейнера и крышки, (iii) обнаруживать несанкционированное вскрытие во время транспортировки, (iv) избежать подмены и (v) сохранить данные и гарантировать, что данные не были изменены.
В настоящее время известны способы надежного опломбирования контейнеров, то есть опломбирования, благодаря которому затем можно обнаружить/заметить взлом/вскрытие контейнера.
В известных способах опломбирования контейнеров с ядерными материалами применяют перфорированные болты или другой крепеж в сочетании с проволочной пломбой (металлическим кабелем или оптоволоконными петлями). Все известные системы требуют наличия авторизованного лица (т.е. инспектора) во время закрытия и вскрытия.
Например, решения предшествующего уровня техники включают в себя использование пассивных петлевых пломб (например, пломба COBRA) или активных электронных пломб (например, EOSS). В каждом случае проволоку или оптоволокно пропускают через крепеж на контейнере и в крышке при закрытии контейнера. Проволоку соединяют с пломбой. В случае использования пломбы COBRA для вскрытия контейнера необходимо сломать пломбу. В случае использования пломбы EOSS, вскрытие фиксируется внутри пломбы. Недостатком является то, что в обеих известных системах рассчитывают на правильную установку проволоки в крепеже на контейнере. Кроме того, провисание провода может предоставить возможность вскрыть контейнер без обнаружения пломбой. Кроме того, во время транспортировки оптоволокно может быть повреждено, что влечет за собой бесполезность пломбы. Система COBRA требует инспекции до вскрытия контейнера (разрыва пломбы), поскольку отсутствует способ определения времени, когда пломба сломана.
Другие пломбы обнаруживают смещение посредством контакта или магнитов, но способы не могут надежно предотвратить попытки несанкционированного вскрытия.
Даже если применяемые в настоящее время уплотняющие болты пломбировали бы контейнеры очень надежно, тем не менее отсутствуют системы, которые удовлетворяли бы всем требованиям, в частности, предоставляли бы возможность работать без надзора, но с обеспечением надежности системы.
US-A-2004/239435 в общем относится к системе обнаружения несанкционированного вскрытия для контейнеров со спасательными плотами. Контейнер спасательного плота используется для хранения надувного спасательного плота и содержит верхнюю часть и нижнюю часть, которые расположены непосредственно одна на другой. Контейнер также содержит RFID систему, способную обнаруживать, когда произошло вскрытие контейнера, то есть расстояние между частями контейнера увеличилось. В частности, материнская RFID метка и дочерняя RFID метка соединены друг с другом и активно взаимодействуют друг с другом для определения расстояния между ними. Когда расстояние между материнской RFID меткой и дочерней RFID меткой увеличивается или уменьшается по отношению к расстоянию D, за пределами заданной величины.
WO-A-2005/111961 в целом относится к использованию RFID меток для доказательства несанкционированного доступа. В частности, пара RFID меток используется для обнаружения изменения относительного положения крышки укупорочного устройства относительно контейнера.
WO-A-2014/009981 в общем относится к синхронизации сверхширокополосной системы позиционирования в реальном времени. Конкретно, для определения 3D позиции помеченного элемента применяют триангуляцию в трех измерениях с использованием по меньшей мере четырех устройств для считывания.
Техническая задача
Задачей настоящего изобретения является обеспечение системы опломбирования с улучшенными защитными признаками и возможностью работы, при которой система опломбирования может быть установлена оператором в месте хранения без присутствия инспекторов, как определено в пункте 1 или пункте 2 формулы изобретения. Еще одной задачей настоящего изобретения является обеспечение способа установки системы опломбирования, как определено в пункте 15 формулы изобретения.
Сущность изобретения
Согласно одному аспекту изобретения предложена система опломбирования для запечатывания крышки контейнера к корпусу контейнера, указанная система опломбирования содержит: по меньшей мере три метки, выполненные с возможностью установки на крышку контейнера или корпус контейнера, причем каждая метка имеет уникальный идентификатор (ID) и содержит первый RF приемопередатчик, выполненный с возможностью передавать, при использовании, соответствующий первый RF сигнал; по меньшей мере три фиксатора, выполненные с возможностью установки на другой из указанных компонентов - крышку контейнера или корпус контейнера, причем каждый фиксатор имеет уникальный ID и содержит второй RF приемопередатчик, выполненный с возможностью принимать, при использовании, первый RF сигнал; и ведущий блок, соединенный для обеспечения связи с указанными по меньшей мере тремя фиксаторами; ведущий блок выполнен с возможностью (i) определять для каждой метки соответствующую текущую 3D позицию, ассоциированную с ее ID, на основе принятых первых RF сигналов, (ii) сохранять ранее определенные 3D позиции для каждой метки и (iii) генерировать сигнал тревоги и/или временную отметку и/или запись, при обнаружении, что расхождение между текущей 3D позицией одной или более меток и соответствующей ранее определенной 3D позицией превышает заданное пороговое расстояние.
Ведущий блок может иметь встроенный в него один из указанных по меньшей мере трех фиксаторов.
Предпочтительно, после установки системы опломбирования на контейнер и крышку инспектором, система находится под контролем оператора, который заполняет и закрывает контейнеры. Оператору не требуется выполнять какие-либо операции по установке или активации системы опломбирования, поэтому отсутствуют причины для возникновения ошибки (преднамеренной или непреднамеренной).
С практической точки зрения, эта система опломбирования более безопасна: она требует меньшего объема работы оператора, которому нет необходимости выполнять дополнительные действия, и требуется меньше проверок инспекторами агентства, которые, кроме того, могут проверять систему опломбирования в наиболее удобное время.
Каждый из фиксаторов может быть выполнен с возможностью передавать периодически или по команде от ведущего блока второй RF сигнал, причем второй RF сигнал содержит синхронизирующий сигнал.
Каждый первый RF сигнал может содержать сигнал, сформированный в соответствующей метке, в ответ на второй RF сигнал и/или содержать указание времени приема меткой второго RF сигнала.
Ведущий блок может быть выполнен с возможностью выполнять временное усреднение первого RF сигнала и/или данных, указывающих 3D позицию.
Ведущий блок может быть выполнен с возможностью определять временную точку, при которой расхождение между фиксаторами и метками минимизировано или стабилизировано.
Фиксаторы могут быть жестко прикреплены к контейнеру в известных местах, например, равномерно разнесены по периферийной окружности контейнера, и ведущий блок выполнен с возможностью определять для каждой метки соответствующую текущую 3D позицию на основе ин указанных известных мест.
Ведущий блок может быть выполнен с возможностью определять для каждой метки соответствующую текущую 3D позицию с использованием алгоритма триангуляции.
В вариантах осуществления каждая метка и/или каждый фиксатор содержит часы реального времени, а первый RF сигнал и/или второй RF сигнал содержит временную отметку, полученную из соответствующих часов реального времени.
В вариантах осуществления каждый из упомянутых фиксаторов выполнен с возможностью передавать объединенный сигнал в ведущий блок, причем объединенный сигнал содержит пакет для каждой из указанных по меньшей мере трех меток, причем каждый пакет включает в себя идентификатор метки и данные времени поступления. Такая передача может, например, быть выполнена через шину.
В вариантах осуществления каждая метка, и/или каждый фиксатор, и/или ведущий блок содержат энергонезависимую память (NVM) для хранения упомянутых 3D позиций в сочетании с соответствующими идентификаторами меток.
В вариантах осуществления каждая метка содержит первый криптографический модуль, выполненный с возможностью генерировать и сохранять первый криптографический ключ и/или первую цифровую подпись, а каждая метка выполнена с возможностью подписывать указанный первый RF сигнал с использованием указанного первого криптографического ключа или первой цифровой подписи перед передачей в фиксатор.
В вариантах осуществления каждая метка фиксатора содержит, при необходимости, второй криптографический модуль, выполненный с возможностью генерировать и сохранять второй криптографический ключ и/или вторую цифровую подпись, и каждый фиксатор выполнен с возможностью (i) подписывать указанный второй RF сигнал с использованием указанного второго криптографического ключа или второй цифровой подписи перед передачей на метку; и/или (ii) подписывать указанный объединенный сигнал с использованием указанного второго криптографического ключа или второй цифровой подписи перед передачей на ведущий блок. Второй криптографический ключ и /или вторая цифровая подпись могут быть сформированы первым криптографическим модулем.
Данные с цифровой подписью могут храниться локально или отправляться удаленно ведущим блоком без какого-либо риска изменения данных. Промежуточная проверка пломбы не требуется, поскольку все события, относящиеся к операции закрытия или открытия крышки, сохраняются и могут быть извлечены из подписанной записи в NVM.
В вариантах осуществления каждая метка и/или каждый фиксатор включает в себя датчик обнаружения взлома, выполненный с возможностью генерировать, в случае обнаружения нарушения целостности корпуса метки или фиксатора, данные по обнаружению взлома, указанный взлом указанного корпуса.
В вариантах осуществления каждая метка и/или каждый фиксатор включает в себя один или несколько гальванических элементов, подключенных к ним, датчик определения напряжения, выполненный с возможностью, в случае обнаружения значительных уровней напряжения, за пределами первого заданного диапазона, генерировать данные по значительному уровня напряжения, указывающие на нарушение целостности гальванического элемента или элементов.
В вариантах осуществления каждая метка и/или каждый фиксатор содержит датчик температуры, выполненный с возможностью, в случае обнаружения значительных уровней температуры, за пределами второго заданного диапазона, генерировать данные по значительной температуре, указывающие на нарушение целостности метки или фиксатора.
В вариантах осуществления каждая метка или фиксатор прикреплены к крышке контейнера или корпусу контейнера жесткой натяжной лентой, например, изготовленной из стали, пластмассы или композита, каждая метка и/или каждый фиксатор содержит датчик натяжения, например тензодатчик, выполненный с возможностью определять натяжение ленты, причем датчик натяжения выполнен с возможностью, в случае обнаружения значительных уровней натяжения, за пределами третьего заданного диапазона, генерировать данные по значительному уровня натяжения, указывающие на нарушение целостности метки или фиксатора.
Ведущий блок может содержать модуль дальней связи, например, модуль сотовой связи, и может быть выполнен с возможностью, в ответ на генерирование сигнала тревоги, (а) генерировать сигнал тревоги открытого контейнера, при необходимости, добавлять к нему данные, указывающие на нарушение целостности корпуса, данные, указывающие на нарушение целостности гальванического элемента или элементов, данные по значительной температуре и/или данные по значительному натяжению, и (b) передавать сигнал тревоги открытого контейнера в пункт удаленного управления с использованием модуля дальней связи.
Ведущий блок может быть выполнен с возможностью, в ответ на запрос о состояния, принятый из пункта удаленного управления с использованием модуля дальней связи, передавать отчет о состоянии системы опломбирования, причем отчет о состоянии системы опломбирования включает в себя временную отметку и информацию о любом сигнале тревоги открытого контейнера, а при необходимости, данные, указывающие на нарушение целостности корпуса, данные, указывающие на нарушение целостности гальванического элемента или элементов, данные по значительной температуре и/или данные по значительному натяжению; причем отчет о состоянии системы опломбирования передается в удаленный пункт управления с использованием модуля дальней связи.
В соответствии с другим аспектом изобретения предложен способ установки системы опломбирования, содержащий: обеспечение наличия системы опломбирования по любому из пп.1-14 прилагаемой формулы изобретения; установку меток и фиксаторов на крышке контейнера и корпусе контейнера соответственно; и инициирование системы опломбирования.
Дополнительные преимущества изобретения, по меньшей мере, в вариантах осуществления включают в себя:
а. Работу без надзора. После того как система опломбирования установлена на контейнере инспектором, статус контейнера (открыт/закрыт) будет находиться под надзором. Все операции погрузки, закрытия, вскрытия и разгрузки выполняются оператором и не требуется инспектор.
b. Простая система опломбирования контейнера для установки и использования.
с. Высокий уровень безопасности и предоставление информации в режиме реального времени.
d. Минимальный уровень облучения инспекторов.
е. Усовершенствованное временное планирование, поскольку инспектор не должен физически присутствовать при закрытии каждого отдельного контейнера, но может сосредоточить свою деятельность на партии контейнеров в течение более короткого временного интервала.
Краткое описание чертежей
Дополнительные подробности и преимущества настоящего изобретения будут очевидны из последующего подробного описания нескольких неограничивающих вариантов осуществления со ссылкой на прилагаемые чертежи, на которых:
Фиг.1 - покомпонентный вид контейнера (емкости), имеющий систему опломбирования в соответствии с предпочтительным вариантом осуществления изобретения, установленной на нем;
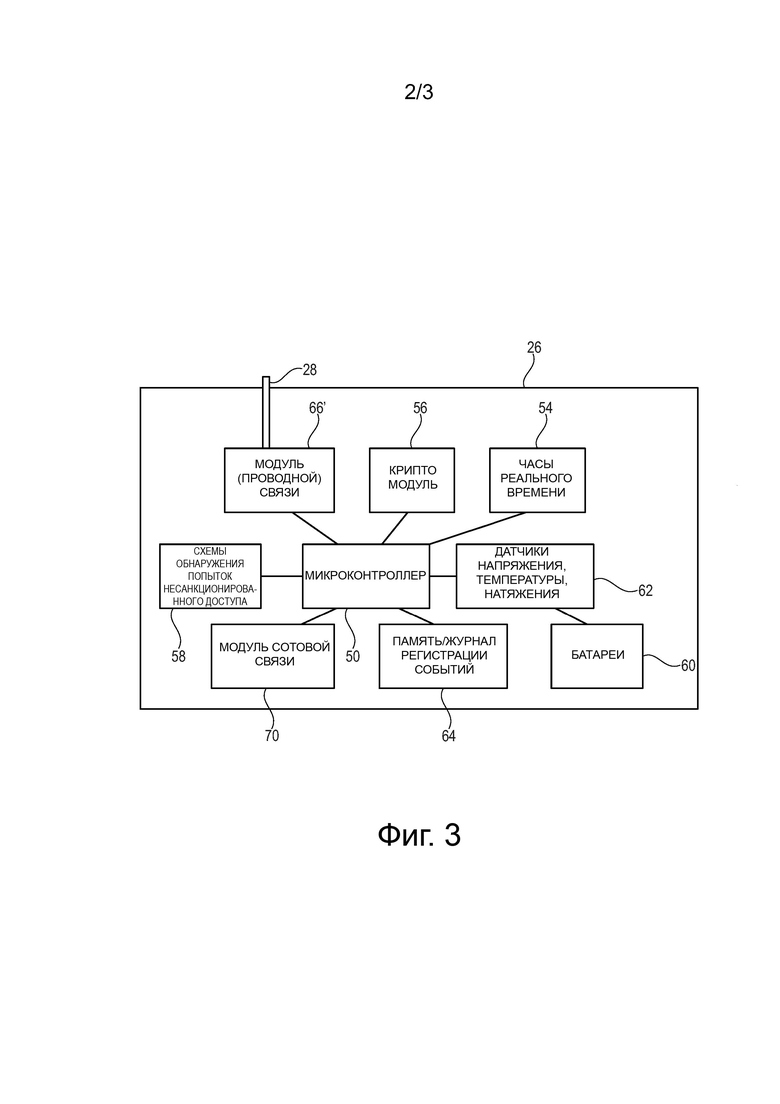
Фиг.2 - блок-схема метки или фиксатора, используемого в системе опломбирования по фиг.1;
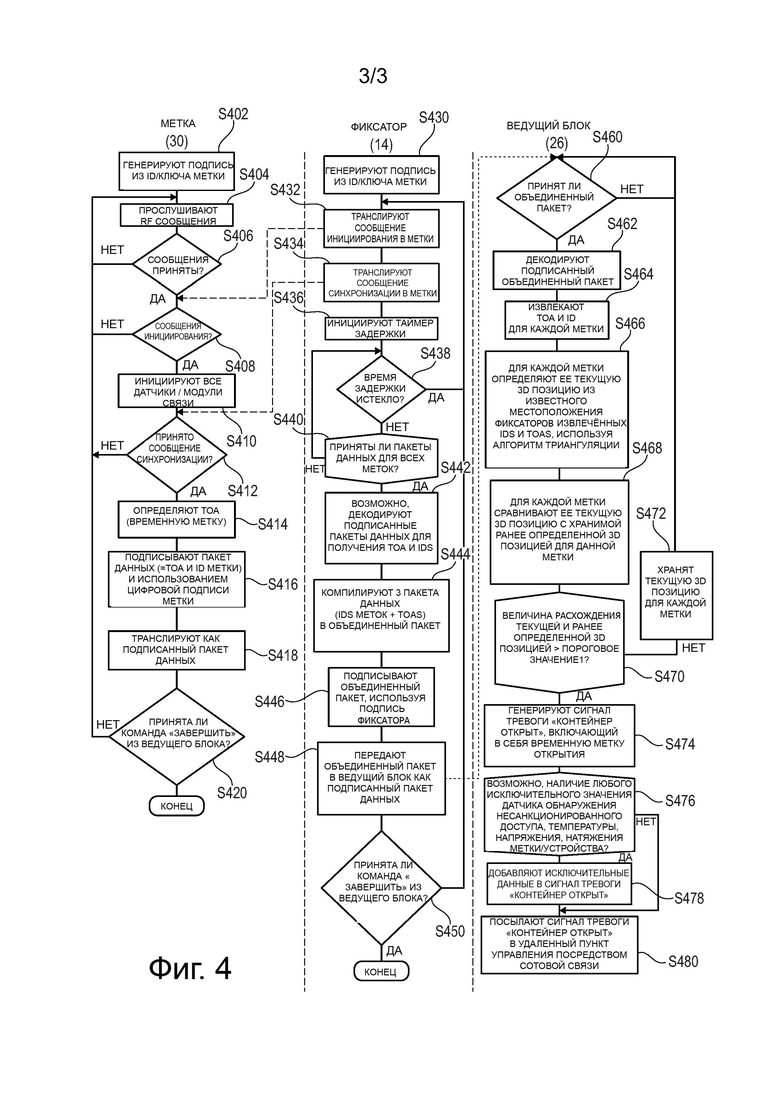
Фиг.3 - блок-схема ведущего блока, используемого в вариантах осуществления изобретения; и
Фиг.4 - блок-схема алгоритма процессов программного обеспечения/программно-аппаратного обеспечения, выполняемого в элементах на фиг.1 в соответствии с вариантом осуществления изобретения.
Описание предпочтительных вариантов осуществления
Необходимость в системе опломбирования, которая может быть установлена оператором без присутствия инспектора, имеет первостепенное значение и актуальность. По меньшей мере, варианты осуществления настоящего изобретения направлены на обеспечение системы опломбирования, которая применима к контейнерам для сухого хранения отработанного ядерного топлива, отвечающая одному или нескольким из следующих требований:
а. Должна работать автоматически, без надзора.
b. Должна быть использована на крышке и корпусе контейнеров для хранения отработанного ядерного топлива без каких-либо изменений корпуса или крышки контейнера и без вмешательства в обычные процедуры погрузки/выгрузки.
с. Должна однозначно идентифицировать корпус контейнера и крышку контейнера вместе как единый элемент (избегая клонирования).
d. Должна быть легко устанавливаемой и снимаемой.
е. Должна обнаружить любое вскрытие/закрытие контейнера посредством удаления крышки.
f. Должна обнаружить любую попытку удаления пломбирующего устройства с крышки или корпуса контейнера.
g. Должна иметь возможность регистрировать и подписывать цифровой подписью события вскрытия/закрытия и взлома.
h. Должна обеспечивать возможность дистанционного опроса для удаленного управления/управления в режиме реального времени.
i. Должна быть автономной (без необходимости внешнего источника питания) для транспортных операций.
j. Может быть установлена только оператором и проверена позднее во время инспекции инспектором, который должен быть уверен, что пломба не была взломана, что означает, что содержимое контейнера является таким же, каким оно было при первоначальном опломбировании контейнера.
k. Может включать в себя взломозащитный корпус, вмещающий пломбу и электронное контрольное устройство, позволяющее инспекторам поставлять комплект оператору, доверяя, что он не был изменен перед установкой.
l. Осуществлять проверку идентичности и целостности пломбы путем осмотра.
m. Может иметь идентичность, которая может быть однозначно ассоциирована с контейнером; и
n. Способна выдерживать суровые условия эксплуатации.
В описании и чертежах одинаковые элементы обозначены одинаковыми ссылочными позициями. Если не указано иное, любой отдельный конструктивный признак, компонент или этап может быть использован в сочетании с любыми другими описанными в настоящем документе конструктивными признаками, компонентами или этапами.
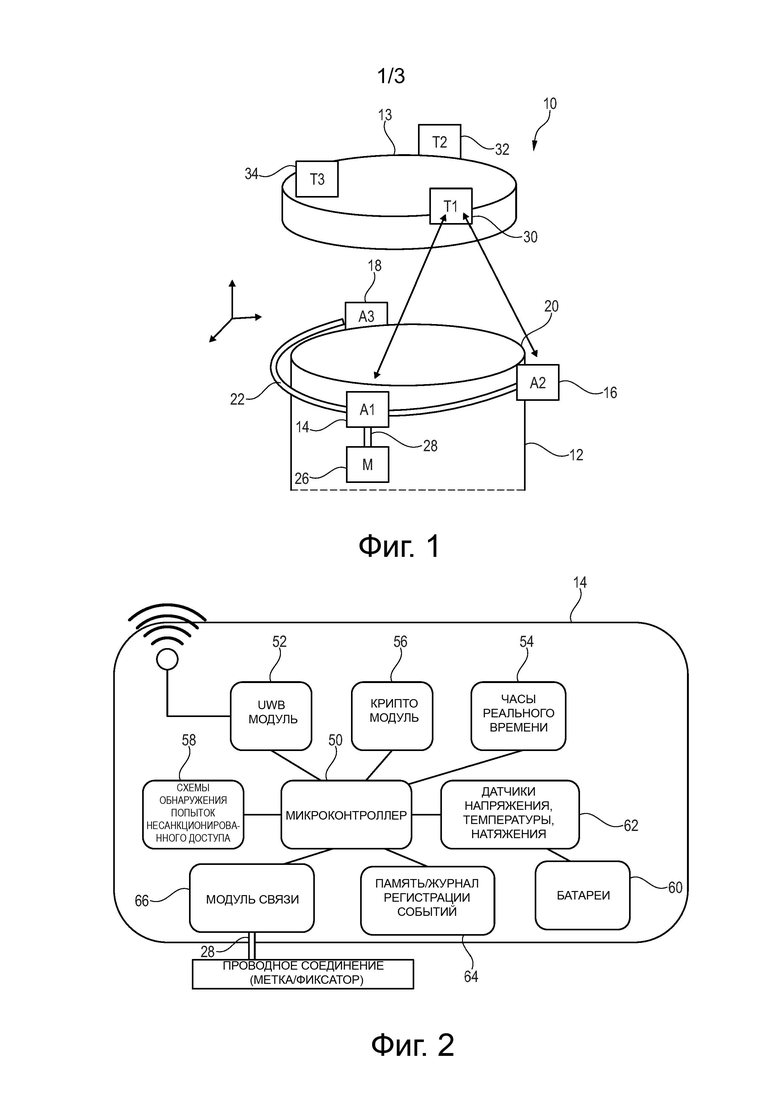
На фиг.1 показан покомпонентный вид контейнера (емкости) 10, имеющий установленную на нем систему опломбирования в соответствии с предпочтительным вариантом осуществления изобретения.
В этом варианте система опломбирования включает в себя три электронных устройства первого типа (A1 - A3, называемые в дальнейшем «фиксаторы» 14, 16, 18), которые прикреплены к внешней периферии корпуса 12 контейнера на открытом конце 20. Корпус 12 контейнера представляет собой тип контейнера, предназначенный, например, для заполнения ядерными отходами или другими опасными отходами. Три фиксатора 14, 16, 18 соединены между собой и взаимодействуют через проводное соединение, а именно, шину 22. В этом варианте ведущий блок 26 соединен посредством дополнительного проводного соединения 28 с одним из фиксаторов, в этом случае, фиксатором 14.
Однако в другом предпочтительном варианте (не показан) функциональные возможности и/или компоненты ведущего блока 26 включены в один из фиксаторов 14, 16, 18, например, фиксатор 14. Данная компоновка оптимизирует и упрощает процесс изготовления/установки.
Фиксаторы 14, 16, 18 установлены на корпусе 12 контейнера в известных местах, например, равномерно распределенных вокруг периферийной окружности корпуса 12 контейнера. Таким образом, в случае использования трех фиксаторов 14, 16, 18, они расположены с угловым интервалом 120 градусов. Следует понимать, однако, что по периферийной окружности корпуса 12 контейнера могут быть использованы четыре или более фиксаторов 14, 16, 18, так что в случае применения четырех фиксаторов, они расположены с угловым интервалом 90 градусов и т.д.
В предпочтительном варианте три фиксатора 14, 16, 18 прикреплены к корпусу 12 контейнера жесткой натяжной лентой (не показана) для предотвращения несанкционированного снятия.
Система опломбирования в соответствии с этим вариантом осуществления изобретения также включает в себя установленные на крышке 13 контейнера 10 три электронных устройства второго типа (T1, T2, T3, называемые здесь «метками» 30, 32, 34).
В предпочтительном варианте три метки 30, 32, 34 прикреплены к крышке 13 контейнера жесткой натяжной лентой (не показана). В случае, когда используют три метки 30, 32, 34, они расположены с угловым интервалом в 120-градусов. Следует понимать, однако, что на периферийной окружности крышки 13 контейнера можно использовать четыре или более меток 30, 32, 34, так что в случае использования четырех фиксаторов они расположены с угловым интервалом 90-градусов и т.д.
Как правило, использование большего количества меток и фиксаторов может повысить точность.
При использовании, систему опломбирования, содержащую фиксаторы 14, 16, 18 и метки 30, 32, 34, а также ведущий блок 26, прикрепляют к контейнеру 10 перед наполнением корпуса контейнера 12. Наполнение и герметизация контейнера не требует присутствия инспектора.
В соответствии с вариантами осуществления изобретения фиксаторы 14, 16, 18 и метки 30, 32, 34 взаимодействуют друг с другом с использованием сверхширокополосных (UWB) радиочастотных (RF) сигналов для определения расстояний расхождения между устройствами и/или позициями в трех измерениях (3D), как подробно описано ниже. Хотя в этом варианте осуществления используют UWB RF приемопередатчики, следует принимать во внимание, что могут применять не-UWB RF технологии.
На фиг.2 показана блок-схема фиксатора 14, используемого в системе опломбирования, показанной на фиг.1. (Метки 30, 32, 34 являются устройствами, аналогичными фиксаторам 14, 16, 18 и имеют одну и ту же структуру, но запрограммированы по-разному, например, в программно-аппаратном обеспечении. Для краткости, в настоящем документе описана только архитектура фиксатора 14; метки 30, 32, 34 и фиксаторы 16, 18 сконструированы аналогично. В настоящем описании «устройство» может относиться к каждой из меток 30, 32, 34, к каждому из фиксаторов 14, 16, 18 или к любому или ко всем).
Центральным устройства является микроконтроллер 50 малой мощности для управления всей информацией от различных подсистем устройства и для координации всех коммуникаций с другими устройствами, включающими в себя ведущий блок 26. RF (например, UWB) регулирование диапазона, для определения относительной 3D позиции, по меньшей мере, каждой из меток 30, 32, 34, выполняют посредством выделенного UWB модуля 52, который передает и принимает пакеты данных (включающие в себя данные времени прохождения (ToF) и временные отметки, причем последние предоставлены часами реального времени (RTC) 54. Часы 54 реального времени предпочтительно представляют собой точные часы реального времени, которые отслеживают время для точной временной выборки данных (пакетов)/радиочастотных сообщений.
Фиксатор 14 также содержит криптографический модуль 56 (крипто-микросхему), который может генерировать и хранить криптографические ключи для данных цифровой подписи (пакетов) перед передачей. То есть каждая метка и фиксатор снабжены криптографическим модулем 56 с уникальным идентификатором и собственным уникальным закрытым ключом, чтобы избежать клонирования. Ключи генерируют и сохраняют в криптографической микросхеме внутри устройства для максимальной защиты. Все коммуникации между устройствами имеют цифровую подпись с асимметричным алгоритмом аутентификации.
Взломозащитный датчик 58 обнаруживает факт перемещения фиксатора 14 из своей позиции на контейнере. Датчик 58 может быть в виде переключателей обнаружения попыток несанкционированного вскрытия корпуса/контейнера (не показан) устройств и кольцевой защитной схемы (не показана) для предотвращения сверления корпуса/контейнера.
Фиксатор 14 получает электропитание от одной или нескольких гальванических элементов (далее - батарея) 60 (предпочтительно с двойной батареей) и снабжен набором датчиков 62 для контроля напряжения и температуры для обеспечения правильной работы и обнаружения попыток несанкционированного вскрытия. Датчик температуры используют для обнаружения экстремальных температур, которые могут повлиять на работу пломбы. Благодаря использованию датчика температуры процессор 50 может определить, находится ли текущая температура в заданном рабочем диапазоне и/или генерирует сигнал тревоги/нештатной ситуации (сообщение), когда измеренная температура находится за пределами заданного рабочего диапазона.
Встроенный датчик контроля напряжения (схема) обеспечивает правильное питание устройства. Датчик контроля напряжения используют для обнаружения аномальных напряжений, поставленной батареей 60, которые могут изменить работу пломбы. Благодаря использованию датчика контроля напряжения процессор 50 может определить, находится ли напряжения тока выходного сигнала в заданном рабочем диапазоне и/или генерировать сигнал тревоги/нештатной ситуации (сообщение), когда выходной сигнал измеренного напряжения выходит за пределы заданного рабочего диапазона.
Устройство также имеет датчик натяжения (например, тензодатчик или аналогичный датчик) для проверки или контроля натяжения фиксирующей ленты (не показан), используемого для неподвижного прикрепления фиксаторов 14, 16, 18 к корпусу контейнера и/или для прикрепления меток 30, 32, 34 к крышке контейнера 13. Датчик натяжения используют для обнаружения аномальных уровней натяжения фиксирующей ленты (не показана), что может указывать на попытку удалить ленту устройств (т. е. попытку несанкционированного вскрытия). Благодаря использованию датчика натяжения процессор 50 может определить, находится ли текущий уровень натяжения в заданном рабочем диапазоне и/или генерирует сигнал тревоги/нештатной ситуации (сообщение), когда измеренный уровень натяжения выходит за пределы заданного рабочего диапазона.
Фиксатор 14 хранит записи всех обнаруженных событий и/или всех данных датчика во внутренней энергонезависимой памяти (NVM) 64. Данные хранят в NVM 64, предпочтительно с временной отметкой с использованием точной временной меткой из RTC 54.
Наконец, фиксатор 14 устанавливает связь с ведущим блоком (26, фиг.1) через проводную линию 28 связи (такую как последовательную или параллельную линию связи) с использованием модуля 66 связи.
На фиг.3 показана блок-схема ведущего блока 26, используемого в вариантах осуществления изобретения. Схема идентична схеме фиксатора 14 на фиг.2, за исключением случаев, описанных ниже. Ведущий блок 26 действует как блок управления для системы опломбирования.
В ведущем блоке 26, показанном на фиг.3, модуль 66' связи идентичен модулю 66 связи фиксатора 14 и работает по тому же протоколу, например, последовательный или параллельный, для связи с фиксатором 14 через проводную линию связи 28. Дополнительно, ведущий блок 26 включает в себя модуль 70 дальней связи для связи с удаленной центральной станцией управления (не показано), например, принадлежащей агентству по ядерной безопасности. Модуль 70 дальней связи может быть модулем 70 сотовой связи, например, GSM, 3G, 4G, 5G/LTE или тому подобное.
При использовании, фиксаторы 14, 16, 18 инициируют связь с метками 30, 32, 34, то есть каждый фиксатор 14, 16, 18 устанавливает связь с каждой из меток 30, 32, 34. Как только крышку 13 контейнера с тремя метками устанавливаю на корпус 12 контейнера с тремя фиксаторами 14, 16, 18, корпус 12 контейнера и крышка 13 эффективно спарены, и любое относительное перемещение крышки 13 относительно корпуса 12 контейнера будет обнаружено, в том числе, подъем и/или поворот.
Фиксаторы 14, 16, 18 и метки 30, 32, 34 обмениваются пакетами данных, содержащими информацию синхронизации. С целью предотвращения подделок эти пакеты имеют цифровую подпись, используя криптографический модуль 56. Ведущий блок 26 получает все эти пакеты данных и вычисляет время прохождения сигналов между фиксаторами 14, 16, 18 и метками 30, 32, 34, и затем посредством алгоритма триангуляции вычисляют их относительные (3D) позиции. Датчики внутри фиксаторов 14, 16, 18 и метки 30, 32, 34 могут обнаруживать, перемещено ли устройство из своей позиции на контейнере 12. Как более подробно описано ниже, любая попытка подъема крышки 13 обнаруживается системой и фиксируется.
Как более подробно описано ниже, посредством обмена сообщениями и последующего ранжирования/позиционирования устройства (фиксаторы 14, 16, 18 и метки 30, 32, 34) «осознают» свою соответствующую позицию в трехмерном пространстве и ведут себя как уникальная пломба, то есть уникальная для спаривания этого корпуса 12 контейнера и крышки 13. Эта «сеть» трехмерно локализованных пломбировочных устройств позволяет точно определять перемещение (устройств и, следовательно, крышки 13 относительно корпуса 12 контейнера), например, с точностью около 5-15 cm.
Во время работы каждый из трех фиксаторов 14, 16, 18 запрашивает три метки 30, 32, 34. Каждый фиксатор 14, 16, 18 может определять, на каком расстоянии расположены метки 30, 32, 34, используя информацию времени прохождения сигнала. Три фиксатора 14, 16, 18 размещены вокруг корпуса 12 контейнера в плоскости, параллельной поверхности крышки 13 контейнера, предпочтительно при 120° угловом разделении по окружности корпуса контейнера 12. Фиксаторы 14, 16, 18 и метки 30, 32, 34 обмениваются сообщениями для определения времени прохождения сигнала. Эти сообщения имеют цифровую подпись для предотвращения появления других поддельных меток. Все фиксаторы 14, 16, 18 предоставляют информацию о расстоянии в ведущий блок 26 по проводному каналу 28 связи. Ведущий блок 26 собирает всю аутентифицированную информацию и через алгоритм триангуляции определяет трехмерную позицию каждой метки 30, 32, 34.
Поскольку позиция трех фиксаторов 14, 16, 18 на корпусе 12 контейнера является фиксированной и известной, позиции меток 30, 32, 34 могут быть определены с помощью ведущего блока 26. Три фиксатора 14, 16, 18 и три метки 30, 32, 34 являются минимальным количеством для обеспечения приемлемого трехмерного позиционирования. Четыре фиксатора 14, 16, 18 и четыре метки 30, 32, 34 могут повысить точность 3D-позиционирования, но добавив стоимость/сложность.
После того, как крышка 13 установлена на корпус 12 контейнера, ведущий блок регистрирует близость трех меток 30, 32, 34, соединенных с крышкой 13. Любое изменение позиции каждой метки (или изменение на величину, превышающую пороговое расстояние [пороговое значение 1], например, лежащее в диапазоне от 0,1 до 15 cm, предпочтительно от 0,1 до 5 cm, более предпочтительно от 0,1 до 1 cm), рассматривают как открывание крышки. Алгоритм обрабатывает изменения позиции/расстояния относительно пороговой величины (величин) обнаружения и может усреднять установленный временной интервал для позиции/расстояния для предотвращения ложных тревог.
На фиг.4 показана блок-схема алгоритма процессов программного обеспечения/программно-аппаратного обеспечения, выполняемых в элементах на фиг.1, в соответствии с вариантом осуществления изобретения. То есть, проиллюстрированы этапы или процессы, реализованные в каждой метке 14, 16, 18, на каждом фиксаторе 30, 32, 34 и в ведущем блоке 26 при осуществлении мониторинга, обнаружении попыток несанкционированного вскрытия или открытия контейнера (емкости) 10 и оповещения. (Для краткости этот процесс описан в отношении одной метки 30 и одного фиксатора 14, процесс для других меток и фиксаторов аналогичен).
Обращаясь к левому столбцу (метке) на фиг.4, каждая метка 30, 32, 34 имеет свой собственный уникальный идентификатор (ID) и, используя криптографический модуль 56, метка 30 работает, чтобы генерировать подпись из сохраняемого криптографического ключа и идентификатора метки (этап s402). Затем метка 30 прослушивает сообщения, принятые посредством RF (этап s404). На этапе s406, если сообщение не принято, метка 30 продолжает прослушивать принятые сообщения. Если на этапе s406 обнаружено, что RF сообщение было принято, то выполняют проверку (этап s408) относительно того, распознана ли оно как сообщение инициирования из фиксатора 14. На этапе s408, если сообщение инициация не было принято, фиксатор 30 продолжает прослушивать принятые сообщения (s404).
Обращаясь кратко к центральному столбцу на фиг.4, каждый фиксатор 14, 16, 18 имеет свой собственный уникальный идентификатор (ID) и, используя криптографический модуль 56, фиксатор 14 генерирует подпись из сохраненного криптографического ключа и ID метки (этап s430). Либо периодически, в соответствии с заданной периодичностью с использованием часов реального времени, либо по команде от ведущего блока 26, фиксатор 14 транслирует (этап s432) сообщение инициирования в метки 30, 32, 34 в непосредственной близости, используя UWB RF, причем сообщение инициирования предназначено для подготовки меток 30, 32, 34 для двухсторонней связи и операции определения 3D позиции.
Как видно из левого столбца на фиг.4, если на этапе s408 установлено, что сообщение инициирования принято, метка 30 инициирует (этап s410) все датчики 58, 62 и модули 52, 66 связи. Затем, метка 30 прослушивает сообщение синхронизации посредством UWB RF. Если на этапе s412 обнаружено, что сообщение синхронизации не было принято, то метка 30 продолжает прослушивать принятые сообщения (s404).
После передачи сообщения инициирования посредством фиксатора 14 и, как видно в центральном столбце на фиг.4, например, в течение заданного периода после этого, фиксатор 14 транслирует (s434) сообщение синхронизации.
Возвращаясь к левому столбцу на фиг.4, если на этапе s412 обнаружено, что было принято сообщение синхронизации из фиксатора 14, то метка 30 определяет (этап s414) время поступления (ToA) синхронизирующего сигнала с использованием часов 54 реального времени и временные метки ToA, основанные на чтении часов 54 реального времени. Затем ToA можно использовать для определения времени прохождения сигнала (ToF) из фиксатора 14 до метки 30.
Затем, на этапе s416 пакет данных, содержащий идентификатор метки 30 и ToA, имеет цифровую подпись с использованием сгенерированной подписи для метки 30. Затем на этапе s418 метка 30 транслирует подписанный пакет данных.
Затем выполняют проверку (этап s420) в случае, если была принята команда «Завершить» от ведущего блока 26 (например, через фиксатор 14), что указывает на завершения RF передачи или процесса обработки; и если да, то процесс обработки в метке 30 заканчивается. Если не была принята команда «Завершить», процесс обработки возвращается к этапу s404.
На фиксаторе 14 (см. центральный столбец на фиг.4) после передачи сообщения синхронизации с помощью фиксатора 14 запускается таймер задержки (этап s436), причем задержка предназначена для обеспечения приема ответных сообщений из меток 30, 32, 34 относительно сигнала синхронизации.
Выполняют проверку (этап s438) относительно истечении времени задержки; и, если это так, то процесс обработки возвращается к этапу s432, где фиксатор 14 (повторно) транслирует сообщение инициирования в метки 30, 32, 34 в непосредственной близости.
Если время задержки не истекло, то выполняют определение (этап s440), были ли приняты пакеты данных (ответные сообщения на синхронизирующий сигнал) для всех меток 30, 32, 34 фиксатором 14. Если нет, то процесс обработки возвращается к этапу s438.
Если определено (этап s440), что были приняты пакеты данных для всех меток 30, 32, 34, то подписанные пакеты данных декодируют (s442) для получения ToA и ID для метки 30. В этом случае (3 метки), 3 пакета данных (идентификаторы меток + ToAs) скомпилированы в объединенный пакет комбинации на этапе s444.
Затем на этапе s446 подписывают объединенный пакет с использованием цифровой подписи фиксатора 14. Затем отправляют объединенный пакет (этап s448) в ведущий блок 26 в виде подписанного пакета данных.
Затем выполняют проверку (этап s450) в случае приема команды «Завершить» из ведущего блока 26, указывая на завершение RF передачи или процесса обработки; и если да, то завершают процесс обработки в фиксаторе 14. Если команда «Завершить» не была принята, то процесс обработки возвращается к этапу s432.
Ссылаясь на правый столбец на фиг.4, после передачи (этап s448) объединенного пакета в ведущий блок 26 в качестве подписанного пакета данных и определения (этап s460), что был принят объединенный пакет, декодируют подписанный объединенный пакет (этап s462).
Далее на основании декодированного пакета для каждой метки 30, 32, 34 выводят TоA и ID для каждой метки (этап s464); ToF для каждой метки получают из ToAs, как известно специалистам в данной области техники. Например, сообщение синхронизации может содержать точную временную метку, указывающую время отправки. Метка 30 применяет точную временную метку к принятому сообщению синхронизации, указывая ToA. Метка 30 может вычислять ToF = временная отметка (прибытие) - временная отметка (отправка) и вставить результирующие данные в пакет данных, передаваемый в фиксатор 14. Более предпочтительно, метка 30 транслирует ToA (временную отметку) вместе с точной отметкой времени, указывающей время отправки, из сообщения синхронизации или идентификатора сообщения синхронизации, из которого может быть получена точная отметка времени, указывающая время отправки, в фиксатор 14 или ведущий блок 26, что позволяет определять на фиксаторе 14 или ведущем блоке 26 ToF (синхронизирующее сообщение) = отметка времени (прибытие) - отметка времени (отправка).
Затем для каждой метки определяют ее текущую трехмерную позицию (этап s466) из известных местоположений фиксаторов 14, 16, 18 и полученных ToA и идентификаторов, используя алгоритм триангуляции.
После определения текущей трехмерной позиции, для каждой метки сравнивают ее текущую трехмерную позицию (этап s468) с заданной 3D позицией для этой метки (хранится в NVM 64, фиг.2). Затем выполняют проверку (этап s470), превышает ли расхождение между текущей и заданной 3D позиций первую пороговую величину (пороговая величина 1).
Если величина расхождения не превышает первую пороговую величину, то сохраняют текущую 3D позицию для каждой метки (этап s472) в NVM 64.
Если, с другой стороны, величина расхождения превышает первую пороговую величину, что указывает на существенное перемещение крышки 13 относительно контейнера 12 (фиг.1), соответствующее действию вмешательства или (попытка) произошло открытие, ведущий блок генерирует (этап s474) сигнал тревоги сообщение «Контейнер открыт», включающий в себя временную отметку открытия; сигнал тревоги регистрируют в NVM 64.
Как видно на этапе s476, возможно выполняют проверку любого фиксатора/метки относительно информации несанкционированного вскрытия, температуры, напряжения или датчика натяжения, то есть от датчиков 58, 62 соответственно, и, при необходимости, эти данные добавляют (этап s478) в сигнал тревоги (сообщение) «Контейнер открыт».
Три фиксатора 14 закреплены на корпусе 12 контейнера с использованием жесткой натяжной ленты (не показана) под натяжением. Каждый фиксатор 14, 16, 18 может контролировать натяжение ленты. В случае попытки удалить систему из контейнера 10, натяжение ленты ослабевает и ведущий блок 26 обнаруживает попытку несанкционированного вскрытия, генерируя аномальные данные датчика. Аналогичная система обнаружения установлена на ленте (не показано), которая фиксирует три метки 30, 32, 34 на крышке 13. Выполняют аналогичную операцию добавления данных метки/устройства в случае обнаружения аномальный данных несанкционированного вскрытия, температуры или уровня напряжения.
Затем на этапе s480 отправляют сигнал тревоги (сообщение) «Контейнер открыт» в удаленное центральное управление (не показано) через сотовую сеть, например, GSM, 3G, 4G и т.д., используя модуль 70 связи (фиг.3) ведущего блока 26.
Ведущий блок 26 выполнен с возможностью принимать запрос инспектора с помощью подходящего считывающего устройства (не показано), например, через проводной (последовательный/параллельный) порт устройства или по сети беспроводной ближней связи, например, Bluetooth®. В качестве альтернативы или дополнительно ведущий блок 26 снабжен удаленным модулем 70 связи, который использует существующую телекоммуникационную инфраструктуру (то есть GSM, GPRS, 3G или другую систему), позволяя направить удаленный запрос ведущего блока 26, например, для получения данных о состоянии, записи и/или отчетов о попытках несанкционированного вскрытия/сигналов тревоги. Такие данные могут быть надежно переданы в удаленное устройство/станцию в цифровой форме с использованием уникального криптографического ключа и криптографического модуля 56 ведущего блока 26.
Обязанность инспектора (например, из агентства по ядерной безопасности) заключается в проверке правильной установки фиксирующей ленты (не показана) фиксаторов 14, 16, 18 и меток 30, 32, 34. Это соответствует требованию установки на контейнере системы 10 опломбирования авторизованным лицом (инспектором) до загрузки контейнера. Это простая операция и может выполняться в партии контейнеров в самое удобное время в зоне общего доступа, где облучение минимально или отсутствует. Это единственная операция, которая требует наличия инспектора. То есть, все другие операции могут быть выполнены без надзора (инспектором).
Система 10 опломбирования после установки является автономной. Как только крышка 13 установлена на корпус 12 контейнера, система 10 опломбирования обнаруживает крышку 13 и соединяется попарно с корпусом 12 контейнера. Все операции выполняют автоматически и беспроводным способом, и никакая проводка или какая-либо механическая операция не требуется. Это означает, что контейнер загружают и закрывают оператором АЭС без присутствия инспектора.
Кроме того, система 10 опломбирования может дистанционно проверена посредством направления запроса для проверки ее состояния и можно получить доступ к внутреннему журналу событий. Как только контейнер открывается и опустошается, система 10 опломбирования может быть удалена из контейнера и отправлена обратно инспекторам для повторного использования.
Хотя варианты осуществления описаны со ссылкой на варианты осуществления, имеющие различные компоненты в их соответствующих реализациях, будет понятно, что в других вариантах осуществления используют другие комбинации и перестановки этих и других компонентов.
Кроме того, некоторые из вариантов осуществления описаны здесь как способ или комбинация элементов способа, которые могут быть реализованы процессором компьютерной системы или другим средством выполнения функции. Таким образом, процессор с необходимыми инструкциями для выполнения такого способа или элемента способа формирует средство для выполнения способа или элемента способа. Кроме того, описанный в настоящем документе элемент в варианте осуществления устройства, является примером средства для выполнения функции, выполняемой элементом для осуществления изобретения.
В приведенном описании представлены многочисленные конкретные детали. Однако понятно, что варианты осуществления изобретения могут быть осуществлены на практике без этих конкретных деталей. В других случаях, с целью упрощения описания хорошо известные способы, структуры и технологии не были подробно представлены.
Таким образом, несмотря на описание, как полагают, предпочтительных вариантов осуществления изобретения, специалистам в данной области очевидно, что могут быть сделаны другие и дополнительные модификации без отхода от объема изобретения, и предполагают, что все такие изменения и модификации находятся в рамках объема защиты настоящего изобретения. Например, любые приведенные выше формулы представляют собой только процедуры, которые могут быть использованы. Функциональность может быть добавлена или удалена из блок-схем, и операции могут быть взаимозаменяемы между функциональными блоками. Могут быть добавлены или удалены этапы описанных способов в рамках объема настоящего изобретения.
Условные обозначения:
10 система опломбирования
12 корпус контейнера
13 крышка контейнера
14 фиксатор
16 фиксатор
18 фиксатор
20 открытый конец
22 шина
26 ведущий блок
28 проводная линия связи
30 метка
32 метка
34 метка
50 процессор
52 UWB RF модуль
54 часы реального времени
56 криптографический модуль
58 взломозащитный датчик
60 гальванический элемент
62 датчики напряжения, температуры и натяжения
64 NVM
66 модуль проводной связи
70 модуль сотовой связи
| название | год | авторы | номер документа |
|---|---|---|---|
| УПЛОТНИТЕЛЬНЫЙ БОЛТ И СПОСОБ УСТАНОВКИ УПЛОТНИТЕЛЬНОГО БОЛТА | 2017 |
|
RU2713617C1 |
| УЛЬТРАЗВУКОВАЯ ИДЕНТИФИКАЦИЯ И АУТЕНТИФИКАЦИЯ КОНТЕЙНЕРОВ ДЛЯ ОПАСНЫХ МАТЕРИАЛОВ | 2017 |
|
RU2698190C1 |
| СПОСОБ И СИСТЕМА ДЛЯ АУТЕНТИФИКАЦИИ РАДИОНАВИГАЦИИ | 2018 |
|
RU2720881C1 |
| УСТРОЙСТВО ДЛЯ ОПЛОМБИРОВАНИЯ ЗАПОРНОЙ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2014 |
|
RU2577215C1 |
| ЭЛЕКТРОННАЯ НАВИГАЦИОННАЯ ПЛОМБА И СПОСОБ ЕЕ РАБОТЫ | 2020 |
|
RU2739793C1 |
| УПЛОТНИТЕЛЬНЫЙ БОЛТ И УПЛОТНИТЕЛЬНАЯ СИСТЕМА | 2014 |
|
RU2640408C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УКАЗАНИЯ ВРЕМЕНИ И ПОЛОЖЕНИЯ С ПРОВЕРКОЙ ПОДЛИНОСТИ | 2011 |
|
RU2531384C2 |
| СПОСОБ И СИСТЕМА ПОДСЧЁТА МНОЖЕСТВЕННОСТИ ИМПУЛЬСОВ С КОРРЕКТИРОВКОЙ НА ВРЕМЯ НЕЧУВСТВИТЕЛЬНОСТИ СЧЁТЧИКА | 2018 |
|
RU2724317C1 |
| ЭЛЕКТРОННОЕ ПЛОМБИРОВОЧНОЕ УСТРОЙСТВО МНОГОРАЗОВОГО ДЕЙСТВИЯ (ЭПУ МД) | 2015 |
|
RU2596474C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2012 |
|
RU2518806C2 |
Изобретение относится к системе опломбирования для запечатывания крышки контейнера к корпусу контейнера, например, для хранения и транспортировки ядерных отходов. Технический результат заключается в обеспечении надежного и точного выявления событий открытия и закрытия контейнера и регистрации этих данных с одновременной регистрацией времени события. Система опломбирования содержит по меньшей мере три метки, выполненные с возможностью установки на крышку контейнера или корпус контейнера, причем каждая метка имеет уникальный идентификатор (ID) и содержит первый RF приемопередатчик, выполненный с возможностью передавать, при использовании, соответствующий первый RF сигнал. Система содержит по меньшей мере три фиксатора, выполненных с возможностью установки на другом из указанных компонентов - крышке контейнера или корпусе контейнера, причем каждый фиксатор имеет уникальный ID и содержит второй RF приемопередатчик, выполненный с возможностью принимать, при использовании, первые RF сигналы. Ведущий блок, соединенный с метками и фиксаторами, выполнен с возможностью (i) определять для каждой метки ассоциированную с ее ID соответствующую текущую 3D позицию на основе принятых первых RF сигналов, (ii) сохранять ранее определенные 3D позиции для каждой метки и (iii) генерировать сигнал тревоги, и/или временную отметку, и/или запись при определении, что расхождение между текущей 3D позицией одной или нескольких меток и соответствующей ранее определенной 3D позицией превышает заданное пороговое расстояние. 2 н. и 13 з.п. ф-лы, 4 ил.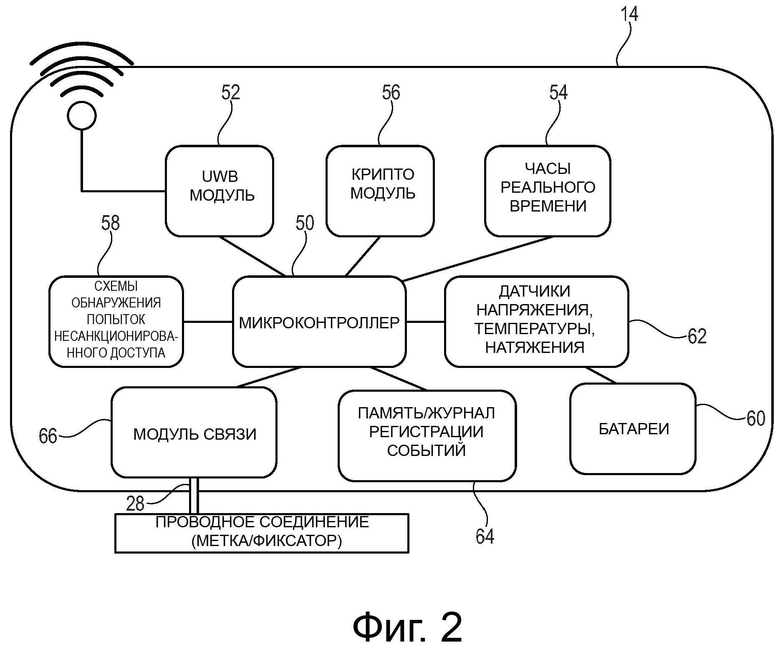
1. Система опломбирования для контейнеров с ядерными материалами, запечатывающая крышку (13) указанного контейнера с ядерными материалами на корпусе (12) указанного контейнера с ядерными материалами, содержащая:
по меньшей мере три метки (30, 32, 34), выполненные с возможностью установки на указанную крышку (13) контейнера или указанный корпус (12) контейнера, причем каждая метка (30, 32, 34) имеет уникальный идентификатор (ID) и содержит первый RF приемопередатчик (52), выполненный с возможностью передавать, при использовании, соответствующий первый RF сигнал, содержащий информацию синхронизации;
по меньшей мере три фиксатора (14, 16, 18), выполненные с возможностью установки на другой из указанных компонентов - крышку (13) контейнера или корпус (12) контейнера, причем каждый фиксатор (14, 16, 18) имеет уникальный ID и содержит второй RF приемопередатчик (52), выполненный с возможностью принимать, при использовании, первые RF сигналы; ведущий блок (26), соединенный для обеспечения связи с указанными по меньшей мере тремя фиксаторами (14, 16, 18); и
энергонезависимую память (64);
при этом ведущий блок (26) выполнен с возможностью:
(i) получать указанные принятые первые RF сигналы от указанных фиксаторов (14, 16, 18),
(ii) определять для каждой метки (30, 32, 34) ассоциированное с ID время прохождения сигналов между соответствующей меткой (30, 32, 34) и каждым из фиксаторов (14, 16, 18) на основе указанной информации синхронизации в указанных принятых первых RF сигналах, и затем соответствующую текущую 3D позицию посредством алгоритма триангуляции,
(iii) сохранять ранее определенные 3D позиции для каждой метки (30, 32, 34), и
(iv) после того как крышка (13) установлена на корпус (12) контейнера, генерировать сигнал тревоги, и/или временную отметку, и/или запись при определении, что расхождение между текущей 3D позицией одной или более из указанных меток (30, 32, 34) и соответствующей ранее определенной 3D позицией превышает заданное пороговое расстояние,
(v) сохранять указанный генерированный сигнал тревоги, и/или временную отметку, и/или запись в энергонезависимой памяти (64).
2. Система опломбирования по п.1, в которой ведущий блок (26) содержит встроенный в него один из указанных по меньшей мере трех фиксаторов (14, 16, 18).
3. Система опломбирования по п.1 или 2, в которой каждый из фиксаторов (14, 16, 18) выполнен с возможностью периодически или по команде от ведущего блока (26) передавать второй RF сигнал, причем второй RF сигнал содержит синхронизирующий сигнал.
4. Система опломбирования по любому из пп.1-3, в которой каждый первый RF сигнал содержит сигнал, сформированный в соответствующей метке в ответ на второй RF сигнал, и/или содержит указание времени поступления на метку второго RF сигнала.
5. Система опломбирования по любому из пп. 1-4, в которой ведущий блок (26) выполнен с возможностью выполнять временное усреднение первого RF сигнала и/или данных, указывающих 3D позицию.
6. Система опломбирования по любому из пп. 1-5, в которой ведущий блок (26) выполнен с возможностью определять временную точку, в которой расхождение между фиксаторами (14, 16, 18) и метками (30, 32, 34) минимизировано или стабилизировано.
7. Система опломбирования по любому из пп. 1-6, в которой фиксаторы (14, 16, 18) неподвижно прикреплены к корпусу (12) контейнера или крышке (13) контейнера в известных местах, например, равномерно разнесены по периферийной окружности корпуса (12) контейнера или крышки (13) контейнера, а ведущий блок (26) выполнен с возможностью определять для каждой метки (30, 32, 34) соответствующую текущую 3D позицию на основе указанных известных мест.
8. Система опломбирования по любому из пп. 1-7, в которой ведущий блок (26) выполнен с возможностью определять для каждой метки (30, 32, 34) соответствующую текущую 3D позицию с использованием алгоритма триангуляции.
9. Система опломбирования по любому из пп. 1-8, в которой каждая метка (30, 32, 34) и/или каждый фиксатор (14, 16, 18) содержит часы (54) реального времени, а первый RF сигнал и/или второй RF сигнал содержит временную отметку, полученную из соответствующих часов (54) реального времени.
10. Система опломбирования по любому из пп. 1-9, в которой каждый из указанных фиксаторов (14, 16, 18) выполнен с возможностью передавать объединенный сигнал в ведущий блок (26) через шину, причем объединенный сигнал содержит пакет для каждой из указанных по меньшей мере трех меток (30, 32, 34), при этом каждый пакет включает в себя ID метки и время поступления данных.
11. Система опломбирования по любому из пп. 1-10, в которой каждая метка (30, 32, 34), и/или каждый фиксатор (14, 16, 18), и/или ведущий блок (26) содержат энергонезависимую память (64) для хранения указанных 3D позиций в ассоциации с соответствующими ID меток.
12. Система опломбирования по любому из пп. 1-11, в которой:
(i) каждая метка (30, 32, 34) содержит первый криптографический модуль (56), выполненный с возможностью генерировать и сохранять первый криптографический ключ и/или первую цифровую подпись, и каждая метка (30, 32, 34) выполнена с возможностью подписывать указанный первый RF сигнал с использованием указанного первого криптографического ключа или первой цифровой подписи перед передачей в фиксатор (14, 16, 18); и/или
(ii) каждый фиксатор (14, 16, 18) содержит, необязательно, второй криптографический модуль (56), выполненный с возможностью генерировать и сохранять второй криптографический ключ и/или вторую цифровую подпись, и каждый фиксатор (14, 16, 18) выполнен с возможностью:
а) подписывать указанный второй RF сигнал с использованием указанного второго криптографического ключа или второй цифровой подписи перед передачей в метку (30, 32, 34); и/или
b) подписывать указанный объединенный сигнал с использованием указанного второго криптографического ключа или второй цифровой подписи перед передачей в ведущий блок (26).
13. Система опломбирования по любому из пп. 1-12, в которой
(i) каждая метка (30, 32, 34) и/или каждый фиксатор (14, 16, 18) содержит датчик (58) обнаружения взлома, выполненный с возможностью генерировать, в случае обнаружения нарушения целостности корпуса метки (30, 32, 34) или фиксатора (14, 16, 18), данные по обнаружению взлома, указывающие на указанный взлом указанного корпуса; и/или
(ii) каждая метка (30, 32, 34) и/или каждый фиксатор (14, 16, 18) содержит один или более гальванических элементов (60), соединенных с ним, датчик (62) обнаружения напряжения, выполненный с возможностью, в случае обнаружения значительных уровней напряжения, за пределами первого заданного диапазона, генерировать данные по значительному напряжению, указывающие на нарушение целостности гальванического элемента или элементов (60); и/или
(iii) каждая метка (30, 32, 34) и/или каждый фиксатор (14, 16, 18) содержит датчик (62) температуры, выполненный с возможностью, в случае обнаружения значительных уровней температуры, за пределами второго заданного диапазона, генерировать данные по значительной температуре, указывающие на нарушение целостности метки (30, 32, 34) или фиксатора (14, 16, 18); и/или
(iv) каждая метка (30, 32, 34) и/или каждый фиксатор (14, 16, 18) прикреплены к крышке (13) контейнера или корпусу (12) контейнера жесткой натяжной лентой, например стальной лентой, при этом каждая метка и/или каждый фиксатор (14, 16, 18) содержит датчик (62) натяжения, например, тензодатчик, выполненный с возможностью определять натяжение ленты, причем датчик (62) натяжения выполнен с возможностью, в случае обнаружения значительных уровней натяжения, за пределами третьего заданного диапазона, генерировать данные по значительному уровню натяжения, указывающие на взлом метки (30, 32, 34) или фиксатора (14, 16, 18).
14. Система опломбирования по любому из пп. 1-13, в которой ведущий блок (26) содержит модуль (70) дальней связи, например, модуль сотовой связи, и выполнен с возможностью:
(i) в ответ на генерирование сигнала тревоги
а) генерировать сигнал тревоги открытого контейнера, при необходимости, добавлять к нему данные, указывающие на нарушение целостности корпуса, данные, указывающие на нарушение целостности гальванического элемента или элементов (60), данные по значительной температуре и/или данные по значительному натяжению, и
b) передавать сигнал тревоги открытого контейнера в удаленный пункт управления с использованием модуля (70) дальней связи, и/или
(ii) в ответ на запрос о состоянии, принятый из удаленного пункта управления с использованием модуля (70) дальней связи, передавать отчет о состоянии системы опломбирования, при этом указанный отчет содержит временную отметку и информацию о любом сигнале тревоги открытого контейнера, а при необходимости, данные, указывающие на нарушение целостности корпуса, данные, указывающие на нарушение целостности гальванического элемента или элементов (60), данные по значительной температуре и/или данные по значительному натяжению; причем отчет о состоянии системы опломбирования передается в указанный удаленный пункт управления с использованием модуля (70) дальней связи.
15. Способ установки системы опломбирования, характеризующийся тем, что:
обеспечивают наличие системы опломбирования по любому из пп.1-14;
устанавливают указанные по меньшей мере три метки (30, 32, 34) на крышку (13) контейнера;
устанавливают на корпус (12) контейнера указанные по меньшей мере три фиксатора (14, 16, 18) или указанные по меньшей мере два фиксатора и ведущий блок (26) и
инициируют систему опломбирования.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЛИПКОСТИ СМАЗКИ | 1938 |
|
SU56040A1 |
| RU 2000132467 A, 27.11.2002 | |||
| СПОСОБ КОНТРОЛЯ СОХРАННОСТИ ОБЪЕКТА | 2007 |
|
RU2343561C1 |

