Предлагаемое изобретение относится к машиностроению, а именно, к манипуляторам, работающим на подземных рудниках и в испытательных камерах, и может быть использовано как энергетическая машина, предназначенная для разрушения горных пород ударным способом (когда ведение буровзрывных работ недопустимо из-за затруднений бурения шпуров, вызванных интенсивной трещиноватостью горных пород или по условиям безопасности труда горнорабочих в связи с высоким газовыделением из горных пластов).
Известен манипулятор, предназначенный для обеспечения быстродействия и достижения значительно большого вылета рабочего органа при небольшом перемещении выходного звена привода перемещения, основанного на использовании механизма многократного шарнирного параллелограмма, обладающего масштабной кратностью, маневренностью, широким диапазоном возможностей зоны обслуживания и герметизации ввода (см. авт. свид. №963847 по М. кл. В25 9/00). Однако такие манипуляторы не могут использоваться в качестве герметичных энергетических средств, предназначенных для разрушений крепких горных пород ударным способом.
Известна также конструкция шпатового манипулятора (см. авт. свид. СССР №1083464, взятого за прототип), предназначенного для работы с радиоактивными веществами и содержащего проходку, шаровую опору, смонтированную в ней трубу, в которой размещена с возможностью поступательного перемещения штанга, имеющая на одном конце замковый орган для крепления сменных инструментов, а на другом - волновую муфту с резьбовой опорой, причем упругое звено муфты герметично связано с трубой, а ее ведущий и ведомый генераторы установлены соосно и связаны резьбовыми соединениями с рукояткой управления и со штоком, а также по меньшей мере два герметичных чехла, для повышения надежности герметизации и расширения зоны обслуживания, шаровая опора выполнена из трех сферических элементов, концентрично расположенных друг относительно друга, причем внутренний элемент через один герметичный чехол связан с проходкой, оба эти элемента образуют замкнутую со стороны рукоятки управления полость, а средний элемент жестко связан с трубой и расположен в этой полости, причем на внутреннем сферическом элементе выполнена конусная поверхность, а герметичные чехлы в виде сильфонов, и для повышения надежности фиксации положения исполнительного органа, он снабжен фиксатором, выполненным в виде резьбовой втулки с внутренней кольцевой сферической поверхностью и предназначенной для взаимодействия с наружным сферическим элементом шаровой опоры.
Однако, в ряде технологических процессов горнодобывающей промышленности целесообразно использовать удар, как способ разрушения пород.
Поэтому, недостатком известного шпатового манипулятора является то, что использование его в качестве мощного ударного устройства для разрушения горных пород невозможно, так как конструкция такого манипулятора не обеспечивает требуемого достижения мощности удара, разрушающего горный массив.
Кроме того, у этого манипулятора ограничен диапазон возможностей зоны обслуживания и свойство его использования как скоростной-энергетической машины, предназначенной для разрушения крепких горных пород.
Для достижения этой цели известный шпатовый манипулятор, содержащий проходку, герметичную шаровую опору с фиксатором, выполненную из трех сферических элементов, концентрично расположенных друг относительно друга и смонтированную в ней трубу шпаги, в которой размещена с возможностью поступательного перемещения штанга задающего механизма и рукоятка управления, снабжен жестко закрепленным центральным шарниром и механизмом многократно-рычажно-шарнирного параллелограмма, выполненного в трубе шпаги манипулятора, ведомое звено которого состоит из нескольких параллелограммов и связано с ударным устройством (предназначенным для разрушения крепких горных пород), а его ведущее звено состоит из одного параллелограмма и жестко связано со штангой задающего механизма и рукояткой управления. Здесь механизм многократно-рычажно-шарнирного параллелограмма обладает свойством мощного усилителя, представляющим собой устройство, в котором осуществляется увеличение скоростных и энергетических параметров (F, N, А и др.) входного (управляющего) импульса (воздействия) за счет использования энергии вспомогательного (управляемого) источника. При этом скорость и мощность удара входного импульса (воздействия) на выходе исполнительного органа увеличивается во столько раз, во сколько раз число параллелограммов его ведомого звена, состоящего из нескольких параллелограммов, больше числа параллелограммов его ведущего звена, состоящего из одного параллелограмма.
Соответственно, отсюда следует, что:
- энергетические параметры на выходе исполнительного органа манипулятора во столько раз больше энергетических параметров на входе импульса воздействия, во сколько раз число параллелограммов больше числа параллелограммов его ведущего звена, состоящего из одного параллелограмма, то есть
где: Э1 - энергетические параметры ведущего звена
Э2 - энергетические параметры ведомого звена
n - число параллелограммов
Это положение обосновывается тем, что:
- путь прямолинейного перемещения ведомого звена механизма многократного шарнирного параллелограмма во столько раз больше пути прямолинейного перемещения его ведущего звена, во сколько раз число параллелограммов его ведомого звена, состоящего из нескольких параллелограммов, больше числа параллелограммов его ведущего звена, состоящего из одного параллелограмма, то есть

где: ΔS - путь прямолинейного перемещения ведущего звена
ΔS1 - путь прямолинейного перемещения ведомого звена
n - число параллелограммов
- скорость прямолинейного перемещения ведомого звена, состоящего из нескольких параллелограммов, во столько раз больше скорости прямолинейного перемещения его ведущего звена, состоящего из одного параллелограмма, во сколько раз число параллелограммов его ведомого звена, состоящего из нескольких параллелограммов, больше числа параллелограммов ведущего звена, состоящего из одного параллелограмма, то есть

где: V1 - скорость линейного перемещения ведущего звена
V2 - скорость линейного перемещения ведомого звена
- время, затраченное на путь прямолинейного перемещения ведомого звена, состоящего из нескольких параллелограммов, равно времени, затраченному на путь прямолинейного перемещения его ведущего звена, состоящего из одного параллелограмма, то есть

где: t1 - время, затраченное на путь прямолинейного перемещения ведущего звена, состоящего из одного параллелограмма
t2 - время, затраченное на путь прямолинейного перемещения ведомого звена, состоящего из нескольких параллелограммов
- ускорение прямолинейного перемещения ведомого звена, состоящего из нескольких параллелограммов, во столько раз больше ускорения прямолинейного перемещения его ведущего звена, состоящего из одного параллелограмма, во сколько раз число параллелограммов его ведомого звена, состоящего из нескольких параллелограммов, больше числа параллелограммов его ведущего звена, состоящего из одного параллелограмма, то есть
где: V1 - скорость прямолинейного перемещения ведущего звена
V2 - скорость прямолинейного перемещения ведомого звена
n - число параллелограммов
Использование кратности скоростных и энергетических параметров (F, N, А и др.) усиливающего свойства механизма многократно-рычажно-шарнирного параллелограмма, смонтированного в трубе шпаги манипулятора, позволит применять его в качестве скоростной энергетической машины, предназначенной для разрушения горных пород ударным способом, что позволит использовать механизм многократно-рычажно-шарнирного параллелограмма в качестве мощного скоростного ударного устройства и создать на его основе ряд конструкций скоростных энергетических машин. Это пополнит коллекцию модификаций манипуляторов, предназначенных для разрушения крепких горных пород в горнодобывающей промышленности, когда ведение буровзрывных работ недопустимо из-за затруднений бурения шпуров, вызванных интенсивной трещиноватостью горных пород или по условиям безопасного труда горнорабочих, в связи с высоким газовыделением из угольных пластов.
При изучении других известных технических решений в данной области признаки, отличающие заявляемое изобретение от прототипа, не были выявлены и поэтому они обеспечивают данному техническому решению критерий «существенные отличия».
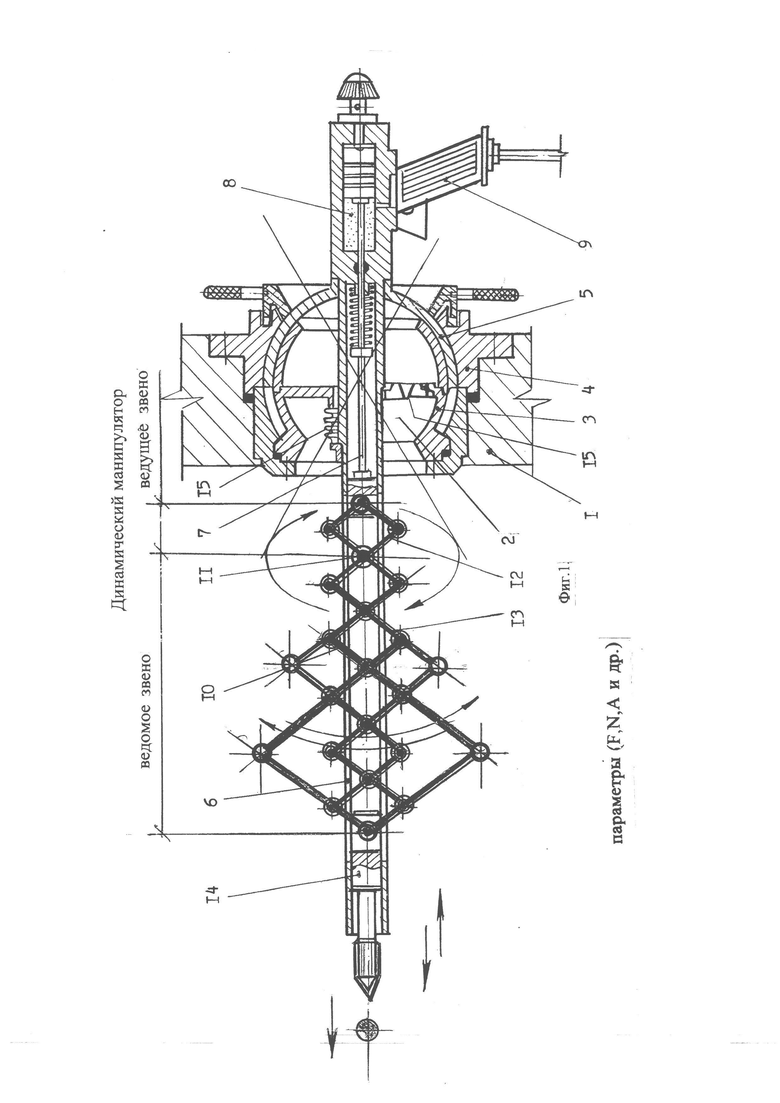
На чертеже фиг. 1 изображен общий вид динамического манипулятора в разрезе, а на фотографии фиг. 2 показан его опытный образец.
Манипулятор содержит проходку 1, шаровую герметичную опору с фиксатором 2, смонтированную из внутреннего 3, наружного 4 и среднего 5 сферических элементов, расположенных концентрично друг относительно друга.
В опоре смонтирована труба 6 шпаги манипулятора, в которой размещена с возможностью поступательного перемещения штанга 7, имеющая на одном конце задающий механизм 8 с рукояткой управления 9, а на другом конце установлен механизм многократно-рычажно-шарнирного параллелограмма 10, выполненный в трубе 6 шпаги манипулятора, причем закреплен внутри ее центральным шарниром 11, разделяющим многократный параллелограмм на ведущее звено 12, состоящее из одного параллелограмма, и связанное со штангой 7, и ведомое звено 13, состоящее из нескольких параллелограммов, и связанное со штангой 7 задающим механизмом 8 и рукояткой 9 управления скоростных и энергетических параметров (F, N, А и др.) входного (управляющего) импульса.
На конце ведомого звена многократного параллелограмма 10, смонтировано ударное устройство 14 (предназначенное для разрушения крепких горных пород ударным способом), расположенное внутри трубы 6 шпаги манипулятора
Внутренний сферический элемент 3 шаровой опоры связан с трубой 6 шпаги манипулятора посредством герметизирующего элемента 15, который может быть выполнен в виде мембраны или сильфона, отделяющего рабочее пространство манипулятора от нерабочего.
Все устройство динамического манипулятора может быть смонтировано в стене борта герметичной самоходной машины, предназначенной для внутришахтных перемещений подземных рудников, например, разрабатывающих урановые месторождения и пр.
Манипулятор работает следующим образом.
Ударный исполнительный орган, представляющий собой трубу 6 шпаги динамического манипулятора получает качательное движение от рукоятки управления 9, качающийся вместе с трубой 6 в шаровой опоре, герметизирующий элемент 15, который отделяет рабочее пространство манипулятора от нерабочего и герметизирует передачу качательного движения исполнительному органу манипулятора от органа его управления.
При разрушении крепких горных пород ударное устройство 14 получает мощный управляемый импульс силы воздействия от ведомого 13 и ведущего 12 звена механизма многократно-рьшажно-шарнирного параллелограмма 10, быстро раздвигающегося в трубе 6 относительно центрального шарнира 11 посредством перемещения штанги 7 задающего механизма 8 и рукоятки управления 9 манипулятора. При этом количество (число) параллелограммов ведущего звена 12 многократного параллелограмма 10 определяет величину скоростных и энергетических (F, N, А и др.) параметров силы (импульса) и мощность удара, разрушающего горные породы.
ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ
По сравнению с прототипом динамический манипулятор позволяет применять его в качестве энергетической машины, обладающей свойством усилителя энергетических параметров входного (управляющего) импульса (воздействия) за счет использования энергии вспомогательного (управляемого) источника, что позволит использовать механизм многократно-рычажно-шарнирного параллелограмма в качестве мощного ударного средства и создать на его основе ряд конструкций энергетических машин однородного класса, обладающих широким диапазоном возможностей зоны обслуживания и герметизации ввода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ МАНИПУЛЯТОР | 2019 |
|
RU2721506C1 |
| Динамический манипулятор | 2018 |
|
RU2691351C1 |
| Баллистический манипулятор | 2018 |
|
RU2686166C1 |
| БАЛЛИСТИЧЕСКИЙ МАНИПУЛЯТОР | 2019 |
|
RU2720756C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2721659C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2018 |
|
RU2718771C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2718812C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2724735C1 |
Изобретение относится к машиностроению, а именно к манипуляторам, работающим на подземных рудниках и в испытательных камерах, и может быть использовано как скоростная энергетическая машина, предназначенная для разрушения горных пород ударным способом. Динамический манипулятор для разрушения крепких горных пород содержит ударное устройство, проходку, шаровую герметичную опору, выполненную из трех сферических элементов, механизм параллелограмма с центральным шарниром, шпагу и смонтированную в ней трубу, связанную с внутренним сферическим элементом шаровой герметичной опоры, задающий механизм входного импульса и связанную с ним рукоятку управления скоростными и энергетическими параметрами входного импульса. В трубе размещена с возможностью поступательного перемещения штанга и жестко закреплен центральный шарнир механизма параллелограмма, ведомое звено которого состоит из нескольких параллелограммов и связано с ударным устройством, а его ведущее звено состоит из одного параллелограмма и связано со штангой, задающим механизмом входного импульса и рукояткой управления скоростными и энергетическими параметрами входного импульса. Механизм параллелограмма выполнен в виде механизма многократно-рычажно-шарнирного параллелограмма. В результате обеспечивается увеличение зоны обслуживания и расширение диапазона скоростных и энергетических параметров. 2 ил.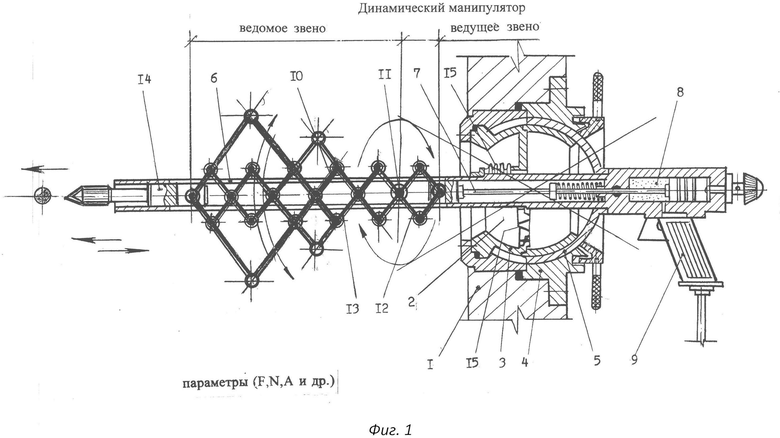
Динамический манипулятор для разрушения крепких горных пород, содержащий ударное устройство, проходку, шаровую герметичную опору, выполненную из трех сферических элементов, механизм параллелограмма с центральным шарниром, шпагу и смонтированную в ней трубу, связанную с внутренним сферическим элементом шаровой герметичной опоры, задающий механизм входного импульса и связанную с ним рукоятку управления скоростными и энергетическими параметрами входного импульса, при этом в трубе размещена с возможностью поступательного перемещения штанга и жестко закреплен центральный шарнир механизма параллелограмма, ведомое звено которого состоит из нескольких параллелограммов и связано с ударным устройством, а его ведущее звено состоит из одного параллелограмма и связано со штангой, задающим механизмом входного импульса и рукояткой управления скоростными и энергетическими параметрами входного импульса, отличающийся тем, что механизм параллелограмма выполнен в виде механизма многократно-рычажно-шарнирного параллелограмма.
| Динамический манипулятор | 2018 |
|
RU2691351C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
| Устройство ударного действия | 1988 |
|
SU1705559A1 |
| DE 3043145 A1, 01.07.1982. | |||

