Изобретение относится к мехатронным системам управления транспортно-технологическими средствами и может быть использовано при эксплуатации машин в точном земледелии.
Традиционно на рулевой вал с помощью рулевого колеса воздействует оператор техники. В условиях цифровизации и применения роботизированных машин, необходимо точное, информативное, а главное, автоматическое воздействие на рулевой вал, по возможности, без участия оператора. Применение такого устройства значительно увеличит точность работы техники, даст больше информации и свободы оператору и поможет в реализации параллельного вождения.
Известен мехатронный электромеханический модуль, который состоит из подвижного корпуса, установленного при помощи двух шарикоподшипников на неподвижном корпусе, содержащем встроенный волновой редуктор и низкооборотный бесконтактный моментный двигатель постоянного тока, ротор которого установлен на полом входном валу волнового редуктора. Внутри него проложены провода информационного и питающего кабеля, подключенного к контроллеру, закрепленному на неподвижном корпусе. Мехатронный электромеханический модуль содержит также датчик крутящего момента, имеющий внутреннее и внешнее кольцо. Причем выходное гибкое колесо волнового редуктора, внутреннее кольцо датчика крутящего момента и двигатель расположены между двумя шарикоподшипниками, на которых установлен подвижный корпус относительно неподвижного корпуса. Кроме этого на внутреннем кольце датчика крутящего момента закреплен одним концом палец, который вторым концом установлен с радиальным зазором в отверстии на внешнем кольце датчика крутящего момента, причем ось пальца параллельна оси подвижного корпуса (RU 144518).
Недостатком этого технического решения является высокая напряжённость основных элементов гибкого колеса и генератора волн волновой редуктор, а также пониженная крутильная жесткость, что негативно скажется в управлении транспортно-технологическим средством на вязком и песчаном грунте, в глубокой дорожной колее.
Известен робототехнический сервопривод, содержащий корпус с прикрепленными к нему и расположенными в нем редуктором, выходным валом, соединенным с редуктором посредством винтового соединения, абсолютным энкодером, соединенным с выходным валом редуктора через зубчатую передачу, электродвигателем с валом с зубчатым колесом,соединенным с редуктором посредством зубчатой передачи, платой управления, расположенной в корпусе со стороны электродвигателя и крепящейся посредством винтового соединения к одной из стенок корпуса, отличающийся тем, что он снабжен блокиратором вала электродвигателя, установленным возле зубчатого колеса вала и закрепленным на корпусе сервопривода посредством винтового соединения со стороны редуктора (RU 185 774).
Недостатком этого технического решения является применение внешнего зубчатого зацепления, когда при большом диаметре зубчатого колеса необходимо заострение вершин зубьев (при числе зубьев z > 42), а эвольвентное внешнее зацепление имеет низкий коэффициент перекрытия ε = 1...2, причем повышенное передаточное число такого зацепления обеспечивается большим межосевым расстоянием между шестернями, что приводит к ограниченному обзору панели приборов управления техникой.
Известен мехатронный тяговый модуль, который содержит корпус с жидкостным охлаждением, в котором расположены электрическая машина и силовой преобразователь, выполненный с использованием дискретных IGBT транзисторов и диодов и/или транзисторно-диодных модулей. Программируемый микропроцессорный контроллер выполнен с возможностью обеспечивать прием сигналов управления и соединен с драйверами и датчиком положения ротора. Фильтр, содержащий конденсаторы, подключен к выводам силового преобразователя. Дополнительно, в зависимости от варианта реализации тягового модуля, транзисторно-диодные модули прикреплены или прижаты к внутренней поверхности корпуса, к подшипниковому щиту или к спинке статора (RU 2621410).
Недостатком этого технического решения является применение внешнего зубчатого зацепления в механической передаче на валу ротора и большие габаритные размеры. Наиболее близким является устройство для подруливания, включающее шестерни внешнего зацепления и электродвигатель, например от компании Raven (https://agrovse.ru/catalog/rastenievodstvo/sistemy-tochnogo-zemledeliya/podrulivayuschie-ustroystva/podrulivayushchee-ustroystvo-raven-smartrax-md/).
Недостатком этого технического решения является применение внешнего зубчатого зацепления, когда при большом диаметре зубчатого колеса необходимо заострение вершин зубьев (при числе зубьев z > 42), а эвольвентное внешнее зацепление имеет низкий коэффициент перекрытия ε = 1...2, причем передаточное число такого зацепления обеспечивается большим межосевым расстоянием между шестернями, что приводит к ограниченному обзору панели приборов управления техникой. Такой механизм с низким передаточным числом не применим для управления транспортно-технологическимимашинами при перемещении по бездорожью и выполнении сельскохозяйственных и дорожно-строительных работ на опорных поверхностях с низкой несущей способностью.
Технический результат - повышение точности и информативности поворота рулевого вала в процессе управления транспортно-технологическим средством за счёт расширения функциональных возможностей мехатронного модуля с обратной связью, подключенного к CAN-шине транспортно-технологического средства.
Технический результат достигается тем, что мехатронный модуль для поворота рулевого вала транспортно-технологического средства, содержит электродвигатель, контроллер, и шестерни, таким образом, что ведомая шестерня установлена жестко на рулевом валу, а для обеспечения временного зацепления на период работы мехатронного модуля ведущая шестерня размещена подвижно на шлицевой втулке с возможностью фиксации в верхнем рабочем положении, закрепленной жестко на валу редуктора электродвигателя с обратной связью для определения положения ротора или обнаружения движения, который с помощью кронштейнов установлен на рулевой колонке, причем шестерни имеют внутреннее зацепление, а для управляемого поворота рулевого вала электродвигатель соединен с драйвером и контроллером электродвигателя посредством электропроводов с возможностью подключения контроллера электродвигателя к CAN-шине транспортно-технологического средства.
На фиг. 1 приведена принципиальная схема мехатронного модуля для поворота рулевого вала транспортно-технологического средства. На фиг. 2. представлен общий вид мехатронного модуля для поворота рулевого вала. На фиг. 3 приведена функционально-технологическая схема дистанционного управления поворотом рулевого вала для примера реализации на транспортно-технологическом средстве.
Мехатронный модуль для поворота рулевого вала транспортно-технологического средства состоит из ведомой шестерни 1, которая установлена жестко на рулевом валу 2, ведущей шестерни 3, шлицевой втулки 4, фиксатора шестерни 5, редуктора 6, электродвигателя 7, углового энкодера 8, установленных на рулевую колонку 9, драйвера 10 и контроллера 11 электродвигателя, подключенных к CAN-шине транспортно-технологического средства 12, и электропроводов 13. Питание драйвера 10 и контроллера 11 осуществляется через понижающий модуль 14 от бортовой сети 15. Электродвигатель 7 питается от драйвера 10 по высоковольтной ветке электропроводов 13.
Мехатронный модуль для поворота рулевого вала транспортно-технологического средства устанавливают на органы управления рулевой системы в кабине оператора: ведомая шестерня 1 жестко размещается на рулевом валу 2; редуктор 6 и с натягом установленная на него шлицевая втулка 4, на которой подвижно установлена ведущая шестерня 3, с возможностью перемещения по шлицам и фиксации в верхнем рабочем положении с помощью шарикового фиксатора 5, электродвигатель 7 и угловой энкодер 8 с помощью кронштейнов жестко устанавливаются на рулевую колонку 9, а контроллер 11 электродвигателя, подключается к CAN-шине транспортно-технологического средства 12, с помощью электропроводов 13. Также, с помощью электропроводов 13 подведено питание к электродвигателю 7, драйверу 10 и контроллеру электродвигателя 11, осуществляемое через понижающий модуль 14, который понижает напряжение от бортовой сети 15 до 12 В.
Скорость вращения рулевого вала зависит от числа оборотов электродвигателя и определяется оператором или программой при автоматическом режиме.
Устройство функционирует следующим образом.
Управление оператором осуществляется следующим образом: с пульта управления команда оператора поступает на CAN-шину через радиоинтерфейс, с которой сигнал поступает на контроллер 11, а затем на драйвер 10 и электродвигатель 7. На валу редуктора 6, с натягом установлена шлицевая втулка 4, на которой подвижно установлена ведущая шестерня 3, с возможностью перемещения по шлицам и фиксации в верхнем рабочем положении с помощью шарикового фиксатора 5. Таким образом, крутящий момент с вала электродвигателя преобразуется в редукторе 6, и передается через его выходной вал на, зафиксированную в шлицах втулки 4, ведущую шестерню 3. Далее крутящий момент с помощью внутреннего зацепления передается на ведомую шестерню 1, которая вращает рулевой вал в заданном направлении в зависимости от команды оператора. Ведомая шестерня 1 и ведущая шестерня 3 за счет внутреннего зацепления вращаются в одном направлении. При этом в автоматическом режиме программа задает команду на CAN-шину по заданному алгоритму перемещения техники.
На основании эскизов и сконструированных сборочных единиц, была построена общая 3D модель мехатронного модуля для поворота рулевого вала (см. фиг.2). Для изготовления мехатронного модуля для поворота рулевого вала транспортно-технологического средства в качестве электродвигателя например, TETRIX MAX TorqueNADO Motor, 12В и со скоростью холостого хода 100 об/мин (1,67 Гц), который размещают в колёсном тракторе ЛТЗ-120Б, полномостовой драйвер двигателя VNH3SP30, редуктор, энкондер входят в конструкцию электродвигателя, понимающий модуль lm1256. Колёсный трактор эксплуатируется не только вручную, но и с помощью пульта дистанционного радиоуправления Radiomaster TX16S, имеющего радиоприёмник и антенну (см. фиг. 3). Пользователь, нажимая соответствующую кнопку на пульте радиоуправления отдаёт команду в контроллер управления трактора, обратно получает телеметрию сигнала и действий. Контроллер управления по CAN-шине передаёт сигнал на контроллерэлектродвигателя, драйвер электродвигателя и электродвигатель с редуктором и энкодером, поворачивая рулевой вал, открывающий гидравлические рулевые клапаны (левый и правый, отвечающие за соответствующий поворот), через которые перекачивается рабочая жидкость. Масло поступает в гидроцилиндры, которые имеют возможность для поворота передних колес трактора через ступицу.
Рассчитывают передаточное отношения электродвигателя и рулевого вала через шестерни:
При пяти оборотах малой шестерни, жестко связанной с электродвигателем, рулевой вал делает лишь один полный оборот.
Сила, которую необходимо приложить для поворота руля составляет 5…80 Н
Рассчитывают силу, которую необходимо приложить для поворота большой ведомой шестерни D2. Отношение моментов силы при вращении руля будет выглядеть следующим образом
где F2 - минимальная сила, которую необходимо приложить для вращения шестерни.
Например, при диаметре D2=480 мм, D1 радиусом 150 мм, получим F2=64 Н.
Сила, с которой вращается малая шестерня при работе электродвигателя TETRIX MAX TorqueNADO Motor с номинальным напряжением 12 В. Учитывая, что крутящий момент двигателя при данной номинальной мощности составляет 4,9 Н*м, рассчитывают окружную силу малой шестерни, которая составляет 163 Н. Силы электродвигателя TETRIX MAX TorqueNADO Motor при работе с номинальным напряжением 12 В вполне достаточно для вращения рулевого вала. Зная частоту вращения электродвигателя рассчитывают угловую скорость малой шестерни:
ω=2πν.
Например, ω=2*3,14*1,67≈10,5 рад/с.
Переводят скорость в линейную:
υ=ωR=10,5*0,03=0,315 м/с
Линейная скорость малой шестерни D2 совпадает с линейной скоростью D1, тогда находим угловую скорость рулевого вала:

Проведенные тестовые испытания показали, что были успешно установлены нулевые положения рулевого вала транспортно-технологического средства. Энкодер электродвигателя успешно передает обратную связь по положению рулевого вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мехатронный модуль воздействия на педаль управления транспортно-технологического средства | 2022 |
|
RU2792709C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2010 |
|
RU2442715C1 |
| МЕХАТРОННЫЙ ТЯГОВЫЙ МОДУЛЬ | 2016 |
|
RU2621410C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| САМОХОДНАЯ МАШИНА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ ПРИВОДА | 2019 |
|
RU2715820C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ МАШИНЫ С ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ | 2017 |
|
RU2648652C1 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| Одноколейный двухколесный автоматизированный скутер и способ его использования | 2018 |
|
RU2702365C1 |


Изобретение относится к области электротехники, в частности к мехатронным системам управления транспортно-технологическими средствами, и может быть использовано при эксплуатации машин в точном земледелии. Технический результат - повышение точности процесса управления транспортно-технологическим средством за счёт точного поворота рулевого вала системы управления транспортно-технологического средства. Мехатронный модуль для поворота рулевого вала содержит в себе электродвигатель постоянного тока и две шестерни внутреннего зацепления для точного поворота рулевого вала при управлении транспортно-технологическим средством. Ведомая шестерня установлена жестко на рулевом валу, а для обеспечения временного зацепления на период работы мехатронного модуля ведущая шестерня размещена подвижно на шлицевой втулке с возможностью фиксации в верхнем рабочем положении, закрепленной жестко на валу редуктора электродвигателя с обратной связью, который с помощью кронштейнов установлен на рулевой колонке. Для управляемого поворота рулевого вала электродвигатель соединен с драйвером и контроллером электродвигателя посредством электропроводов с возможностью подключения контроллера двигателя к CAN-шине транспортно-технологического средства. 3 ил.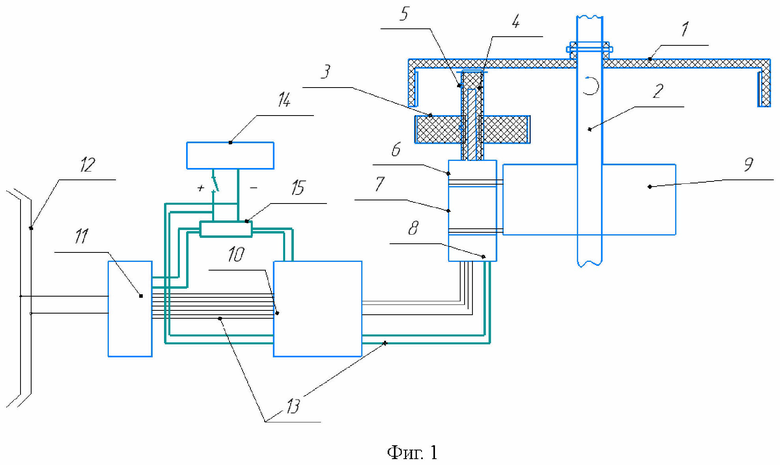
Мехатронный модуль для поворота рулевого вала транспортно-технологического средства, содержащий электродвигатель и шестерни, отличающийся тем, что ведомая шестерня установлена жестко на рулевом валу, а для обеспечения временного зацепления на период работы мехатронного модуля ведущая шестерня размещена подвижно на шлицевой втулке с возможностью фиксации в верхнем рабочем положении, закрепленной жестко на валу редуктора электродвигателя с обратной связью, который с помощью кронштейнов установлен на рулевой колонке, причем шестерни имеют внутреннее зацепление, а для управляемого поворота рулевого вала электродвигатель соединен с драйвером и контроллером электродвигателя посредством электропроводов с возможностью подключения контроллера двигателя к CAN-шине транспортно-технологического средства.
| МЕХАТРОННЫЙ ТЯГОВЫЙ МОДУЛЬ | 2016 |
|
RU2621410C1 |
| ПЛТГНТГО- ,Q ^*-^ 1}^\\'1К1'л^ '"" I БИБЛИОТЕКА; | 0 |
|
SU185774A1 |
| 0 |
|
SU144518A1 | |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ДЛЯ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2194647C2 |
| WO 2020187476 A1, 24.09.2020 | |||
| Автомат для аргонодуговой сварки | 1948 |
|
SU81399A2 |

