Изобретение относится к мехатронным системам управления транспортно-технологическими средствами и может быть использовано при эксплуатации машин в точном землепользовании, строительстве и природообустройстве.
Традиционно на педали управления транспортно- технологического средства воздействует оператор этой техники. В условиях перехода к цифровой эксплуатации техники и применением роботизированных машин, возникает необходимость точного и информативного воздействия на педали управления транспортно-технологического средства, в том числе при дистанционном управлении. Так же в связи с тем, что оператор, например, имеет временно ограниченные возможности по управлению, применение мехатронного модуля воздействия на педали управления транспортно- технологическим средством позволит обеспечить полноценную эксплуатацию техники.
Среди известных технических средств не нашлось прямых аналогов, кроме близкой по функционалу электронной педали (https://consys.com.ua/electropedals/). Работа электронных педалей в транспортных средствах основана на использовании различных типов датчиков (например, датчика на эффекте Холла, характеристики которого являются функцией его углового положения). Похожее техническое решение с обратной связью реализуются в следующем источнике.
Известен бесконтактный датчик положения педали с магнитом, движущимся относительно неподвижного статора с датчиком магнитного поля, где статор представляет собой программируемую интегральную схему двухосевого углового энкодера с интегрированным крестообразным массивом чувствительных элементов Холла для детектирования относительного изменения магнитного поля диаметрально намагниченного магнита, параллельного лицевой поверхности интегральной схемы, запаиваемой способом поверхностного монтажа на печатной плате с интерфейсными компонентами схемы датчика, диаметрально намагниченный магнит, образующий рабочее параллельное магнитное поле, для выравнивания в процессе сборки жестко установлен во втулке с пазами под отвертку, жестко устанавливаемой по результатам выравнивания магнита в установочной втулке ротора с выполненной в ней ориентирующей лыской или ориентирующим пазом для установки с заданной начальной ориентацией и имеющей возможность поворота в корпусе на угол, ограниченный на крайних положениях упорами в основании корпуса и выступами установочной втулки ротора, для механической изоляции статора от движущихся механических частей и ограничения осевых перемещений ротора в датчике содержится крышка-ограничитель, жестко фиксируемая в корпусе поверх ротора, выходной разъем датчика содержит только функциональные выводы, используемые в процессе эксплуатации датчика после его программирования, а технологические выводы, используемые только в процессе однократного программирования, удаляются с платы датчика перед окончательной установкой крышки (Патент РФ №2301399 «Бесконтактный датчик положения педали»).
Однако по анализу приведенных технических решений по педалям управления различных узлов, например, акселератором двигателя, приводной тягой сцепления или тормозной системы транспортных средств, можно отметить, что на этот орган управления все равно воздействует нога оператора.
Недостатком таких конструктивных решений является управление транспортно-технологическим средством на основании ощущений и опыта оператора.
Технический результат - повышение точности и информативности процесса управления транспортно- технологическим средством за счет расширения функциональных возможностей мехатронного модуля воздействия на педаль управления.
Технический результат достигается тем, что мехатронный модуль воздействия на педаль управления транспортно-технологическим средством содержит сервопривод, винт и гайку с шарниром для воздействия на педаль-рычаг и размещается в кабине оператора, причем сервопривод крепится к облицовке кабины и вращает винт, по которому перемещается гайка с шарниром, закрепленным с тыльной стороны педали, для воздействия на нее, а управляющее вращение сервопривода мехатронного модуля выполняется по сигналу, поступающему с помощью дистанционного пульта оператора, через радиоинтерфейс, контроллер управления и CAN-шину.
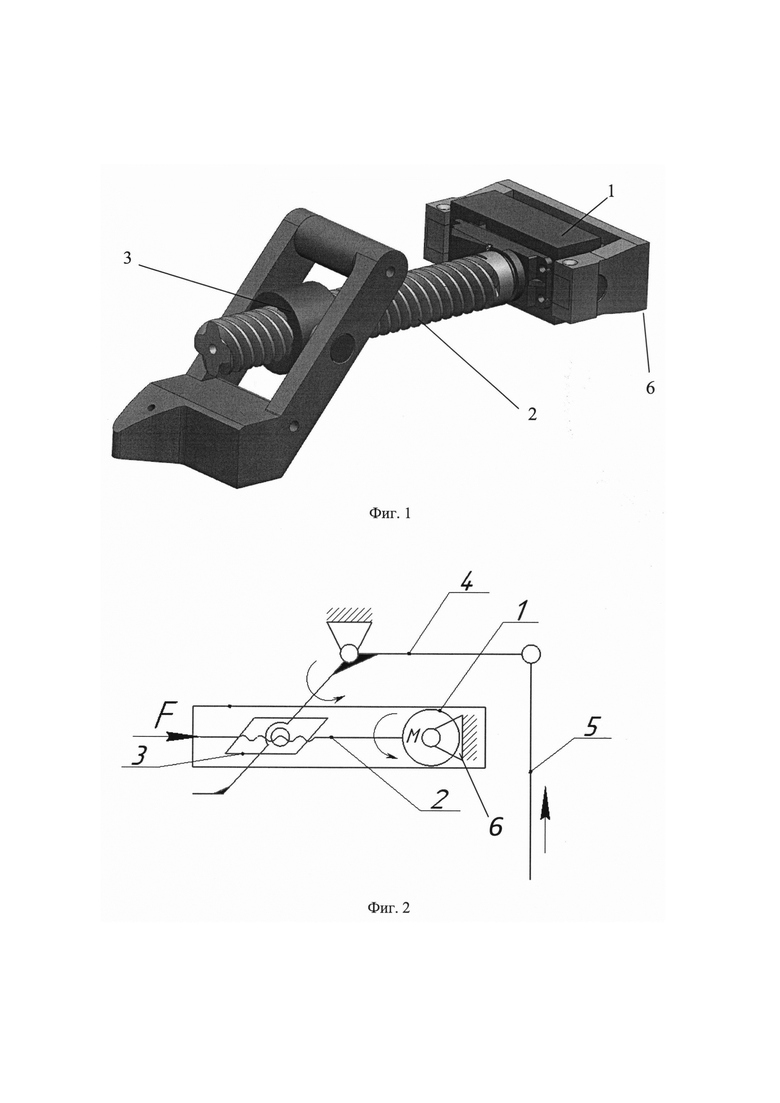
Фиг. 1 Общий вид мехатронного модуля воздействия на педаль управления транспортно-технологического средства: 1 - сервопривод; 2 - винт; 3 - гайка с шарниром
Фиг. 2 Структурная схема реализации управления мехатронным модулем воздействия на педаль транспортно-технологического средства: 1 - сервопривод; 2 - винт; 3 - гайка с шарниром; 4 - педаль-рычаг; 5 - тяга привода к механизму системы управления.
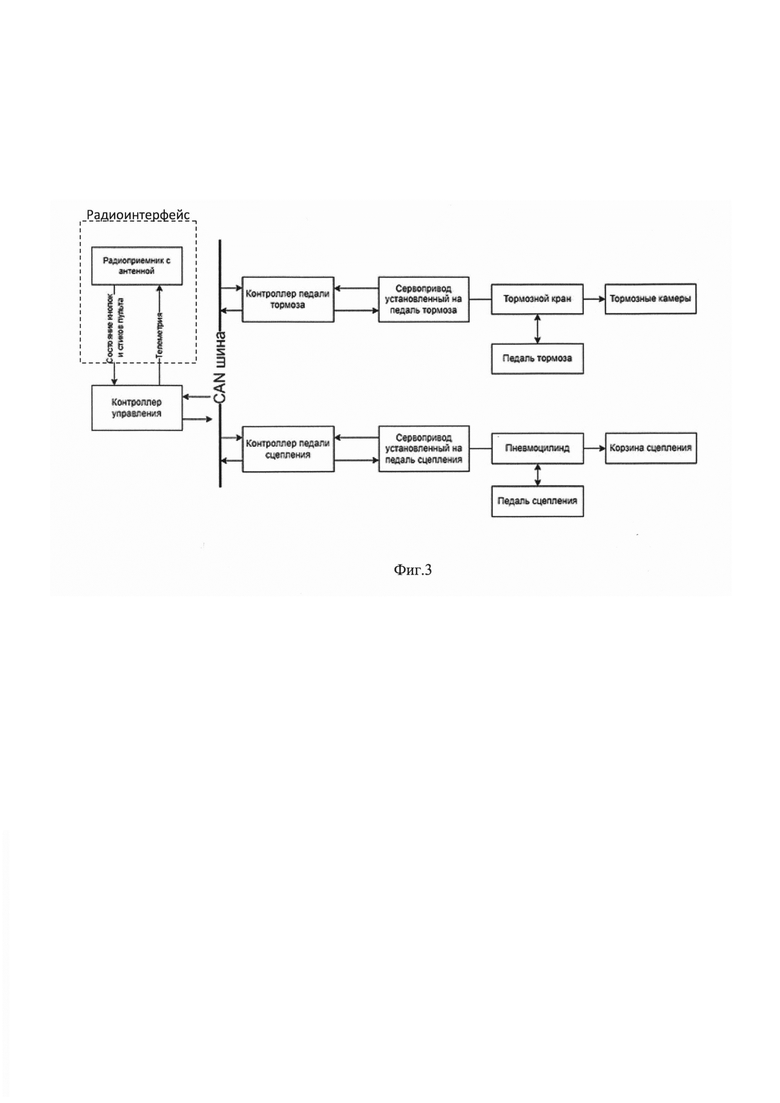
Фиг. 3. Функционально-технологическая схема системы управления тормозом и сцеплением.
Мехатронный модуль воздействия на педаль управления транспортно-технологическим средством содержит сервопривод 1, винт 2 и гайку с шарниром 3 для воздействия на педаль 4 в виде рычага соединенного с тягой привода 5 к механизму системы управления, шарнирного кронштейна 6, и размещается в кабине оператора (фиг. 1 и 2). Сервопривод крепится к облицовке кабины и вращает винт 2, по которому перемещается гайка с шарниром 3, закрепленным с тыльной стороны педали 4, для воздействия на нее, а управляющее вращение сервопривода 1 мехатронного модуля выполняется по сигналу, поступающему с помощью дистанционного пульта оператора, через радиоинтерфейс, контроллер управления и CAN-шину (фиг. 3). Устройство функционирует следующим образом.
Перед эксплуатацией транспортно-технологического средства мехатронный модуль воздействия размещают на педали управления. Закрепляют модуль с помощью винтов и технологических отверстий с тыльной стороны педали. Сервопривод 1 крепят с помощью шарнирного кронштейна к облицовке кабины (см. фиг. 2). В процессе управления транспортно- технологическим средством за счет расширения функциональных возможностей мехатронного модуля воздействия на педаль управления сервопривод получает на вход управляющие сигналы с CAN-шины, которые содержат: угол поворота педали относительно оси вращения (см. фиг. 3). Плата управления (в корпусе сервопривода 1) сравнивает это значение с показанием на датчике обратной связи. Заданное значение в виде угла поворота сравнивается с показаниями внешнего датчиком обратной связи (потенцометром). Поскольку сервопривод 1 по типу цифровой, то на плате управления имеется микропроцессор, который принимает импульсы, анализирует их и управляет электродвигателем. Цифровой сервопривод 1 использует процессор, который получает управляющие импульсы с CAN-шины, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и более. При получении сигнала сервопривод 1 начинает вращать винт 2. Если вращение обеспечивается по часовой стрелке, согласно полученного сигнала, то гайка с шарниром 3 начинает закручиваться, увлекая за собой педаль, обеспечивая ее нажатие. Если вращение выполняется против часовой стрелки, согласно полученного сигнала, то гайка с шарниром 3 начинает выкручиваться и педаль отпускается.
Пример 1. Мехатронный модуль воздействия устанавливают на педаль тормозной системы в кабине колесного трактора ЛТЗ-120Б. Колесный трактор эксплуатируется, в том числе с помощью радиоуправляющего пульта Radiomaster TX16S, имеющего радиоприемник и антенну (см. фиг. 3). Воздействуя на соответствующий стик пульта, оператор задает управляющий сигнал на контроллер управления, а обратно получает телеметрию сигнала и действий. Далее контроллер управления на базе микроконтроллера STM32 передает сигнал через CAN-шину на контроллер педали тормоза на базе микроконтроллера STM32 и сервопривод DS5160B мехатронного модуля воздействия. Отжимается педаль тормоза и через тормозной кран срабатывают тормозные камеры трактора ЛТЗ-120Б.
Пример 2. Мехатронный модуль воздействия устанавливают на педаль сцепления в кабине колесного трактора ЛТЗ-120Б. (см. фиг. 3). Оператор, воздействуя на соответствующую кнопку, задает управляющий сигнал на контроллер управления на базе микроконтроллера STM32, для передачи сигнала через CAN-шину на контроллер педали сцепления на базе микроконтроллера STM32 и сервопривод DS5160B мехатронного модуля воздействия. Отжимая педаль сцепления, пневмоцилиндр включает корзину сцепления трактора ЛТЗ-120Б. В качестве сервопривода 1 используется цифровой водонепроницаемый сервопривод с высоким крутящим моментом (60 кг) DS5160B.
Приведем расчет винтовой передачи мехатронного модуля воздействия. Передаточное отношение винтовой передачи для управления системой тормоза и сцепления определяется по выражению:
где d - диаметр окружности, по которой перемещается точка приложения силы; Р1 - ход винта. Это передаточное отношение справедливо, если рассматриваются осевая сила и окружная сила, вращающая винт.
Ход винта равен:
Р1=Р×n=8×4=32 мм,
где Р - шаг резьбы; n - число заходов резьбы.
Скорость перемещения гайки по винту для винтовой передачи находится по формуле:
S=nх.вktх.в
где nx.в - частота вращения ходового винта.
Для того чтобы найти частоту вращения винта необходимо узнать за какое время винт совершит один оборот. Известно, что за 0,13 секунд при 8,4V винт совершает 60°. При данном напряжении достигается наиболее высокая эффективность работы сервопривода.
Исходя из данных по скорости для сервопривода DS5160B, получаем, что частота вращения ходового винта равна 79 об/мин;
k = 4 - число заходов винта;
tx.в = 28 - шаг ходового винта, мм;
Подставив значения в формулу получаем следующее:

По формуле рассчитали скорость перемещения педали, с помощью разработанного мехатронного модуля, которая составила 147,5 мм/с. Тогда по обратной связи, решается обратная задача, получаем фактическое количество оборотов вала и рассчитываем точное положение и перемещение педали за рассматриваемое время (табл. 1).
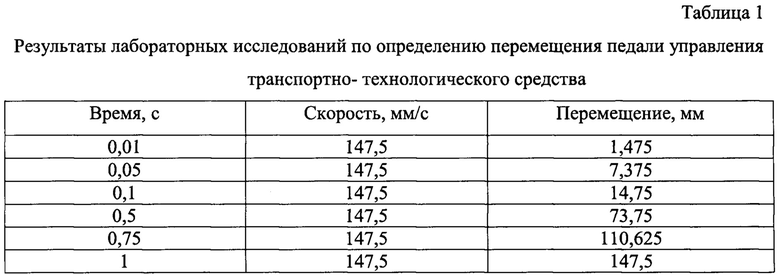
В основном общее перемещение педалей 10…15 см.
На основании эскизов и сконструированных сборочных единиц, была построена общая сборочная 3D - модель мехатронного модуля воздействия, отвечающая за управление системами сцепления и тормоза (фиг. 1).
Проведенные тестовые испытания и исследование взаимосвязи параметров траекторий поворота педали относительно точки ее крепления и технологической надежности мехатронного модуля позволили получить обратную связь по процессу управления. Показана диагностическая информативность параметров траекторий перемещения педали.
Таким образом, подтверждено повышение точности и информативности процесса управления транспортно-технологическим средством за счет расширения функциональных возможностей мехатронного модуля воздействия на педаль управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мехатронный модуль для поворота рулевого вала транспортно-технологического средства | 2022 |
|
RU2796264C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| Машина для междурядной и приствольной обработки почвы | 2021 |
|
RU2767791C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ РОБОТОМ | 2021 |
|
RU2775876C1 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| Устройство для проверки сцепления транспортного средства | 1983 |
|
SU1103106A1 |
| Способ изготовления устройства изменения скоростного режима дизеля, используемого при измерении дымности отработавших газов дизеля | 2024 |
|
RU2831952C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Способ измерения дымности отработавших газов автоматическим устройством скоростного режима дизеля | 2024 |
|
RU2828943C1 |
Изобретение относится к мехатронным системам управления транспортно-технологическими средствами и может быть использовано при эксплуатации машин в точном землепользовании, строительстве и природообустройстве. Мехатронный модуль воздействия на педаль управления транспортно-технологического средства содержит сервопривод, винт и гайку с шарниром для воздействия на педаль. Технический результат - повышение точности и информативности процесса управления транспортно-технологическим средством за счет расширения функциональных возможностей мехатронного модуля воздействия на педаль управления. 3 ил., 1 табл.
Мехатронный модуль воздействия на педаль управления транспортно-технологического средства, содержащий сервопривод, винт и гайку с шарниром для воздействия на педаль-рычаг и размещающийся в кабине оператора, причем сервопривод крепится к облицовке кабины и вращает винт, по которому перемещается гайка с шарниром, закрепленным с тыльной стороны педали, для воздействия на нее, а управляющее вращение сервопривода мехатронного модуля выполняется по сигналу, поступающему с помощью дистанционного пульта оператора, через радиоинтерфейс, контроллер управления и CAN-шину.
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2013 |
|
RU2529929C1 |
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2015 |
|
RU2645487C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ ПЕДАЛИ | 2005 |
|
RU2301399C2 |
| US 6095945 A1, 01.08.2000 | |||
| Тарасик Владимир Петрович, Горбатенко Николай Николаевич, Плякин Роман Владимирович, Савицкий Виктор Сергеевич | |||
| Мехатронная система автоматического управления гидромеханической передачей мобильных машин // Вестник Белорусско-Российского | |||

