Изобретение относится к области автоматизированных систем управления технологическими процессами и используется для комплексного мониторинга и диагностики линейных участков между крановыми площадками магистрального газопровода (далее - МГ) при аварийных ситуациях, связанных с его разрывом.
Одной из основных аварийных ситуаций на магистральном газопроводе является его разрыв или утечка газа.
На данный момент на существующих системах диспетчерского контроля и управления (далее - СДКУ), анализ и мониторинг точного определения линейного участка между крановыми площадками и места разрыва МГ, в режиме реального времени, отсутствует. Единственным техническим способом обнаружения разрыва является визуальная диагностика сменным персоналом диспетчерской службы давления газа в МГ по каждому датчику отдельно при срабатывании аварийной уставки падения давления.
Основным недостатком данного способа является отсутствие возможности своевременно определить аварийный участок МГ и место разрыва. Вызвано это тем, что при аварии и залповом опорожнении участка давление газа в трубопроводе падает, практически, одновременно на всей протяженности нитки газопровода или сразу на нескольких взаимосвязанных нитках (в зависимости от положения запорной арматуры), от компрессорной станции (далее - КС) до КС, что влечет за собой увеличение выброса газа в атмосферу. При неправильном определении аварийного участка возможны затруднения его локализации и многократное увеличение выброса газа.
Задача изобретения - сокращение экономических затрат, связанные с выбросом газа при несвоевременной идентификации аварийного участка.
Технический результат - минимизация времени идентификации участка и места разрыва магистрального газопровода в режиме реального времени, при возможных аварийных ситуациях.
Поставленная задача решается, а технический результат достигается путем разработки интеллектуальной системы помощи принятия диспетчерских решений (далее - ИС ППДР) для точного определения участка и места разрыва магистрального газопровода в режиме реального времени.
Данная система является комплексным расширением функциональных возможностей СДКУ реального времени и может применяться, например, на базе СДКУ SCADA PSI (AG).
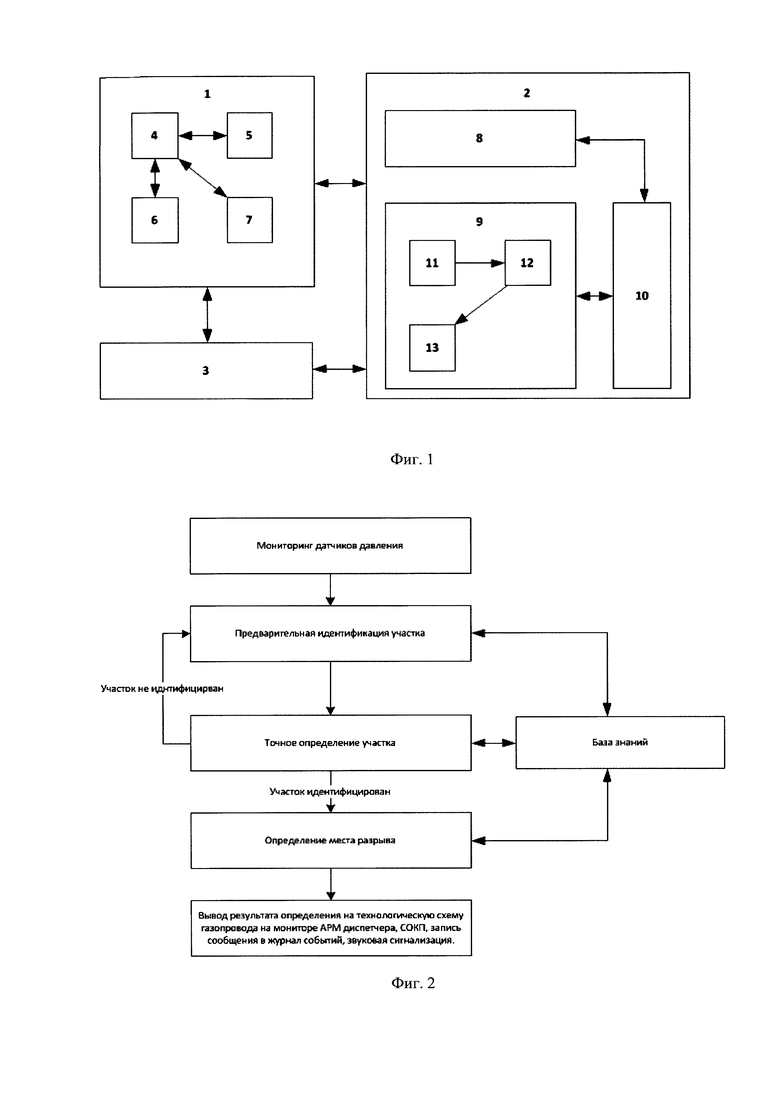
Состав ИС ППДР представлен на Фиг.1.
ИС ППДР состоит из двух основных блоков: блока комплекса программно-технических средств (далее - ПТС) 1, блока определения участка и места разрыва 2, а также базы данных реального времени СДКУ (далее - БД РВ) 3.
Блок комплекса ПТС 1 состоит из серверного оборудования 4 (сервер системы управления баз данных, сервер визуализации, коммуникационный сервер - для связи с объектами), автоматизированного рабочего места (далее - АРМ) диспетчера 5, система отображения коллективного пользования (далее - СОКП) 6, устройства вывода информации (принтера) 7.
В состав блока определения участка и места разрыва 2 входит: модуль мониторинга и диагностики состояния датчиков давления 8, блок определения участка и места разрыва 9, база знаний (далее - БЗ) 10.
В состав блока определения участка и места разрыва 9 входит: модуль предварительного определения участка 11, модуль уточненного расчета и определения аварийного участка 12, модуль определения места разрыва или утечки на линейном участке 13.
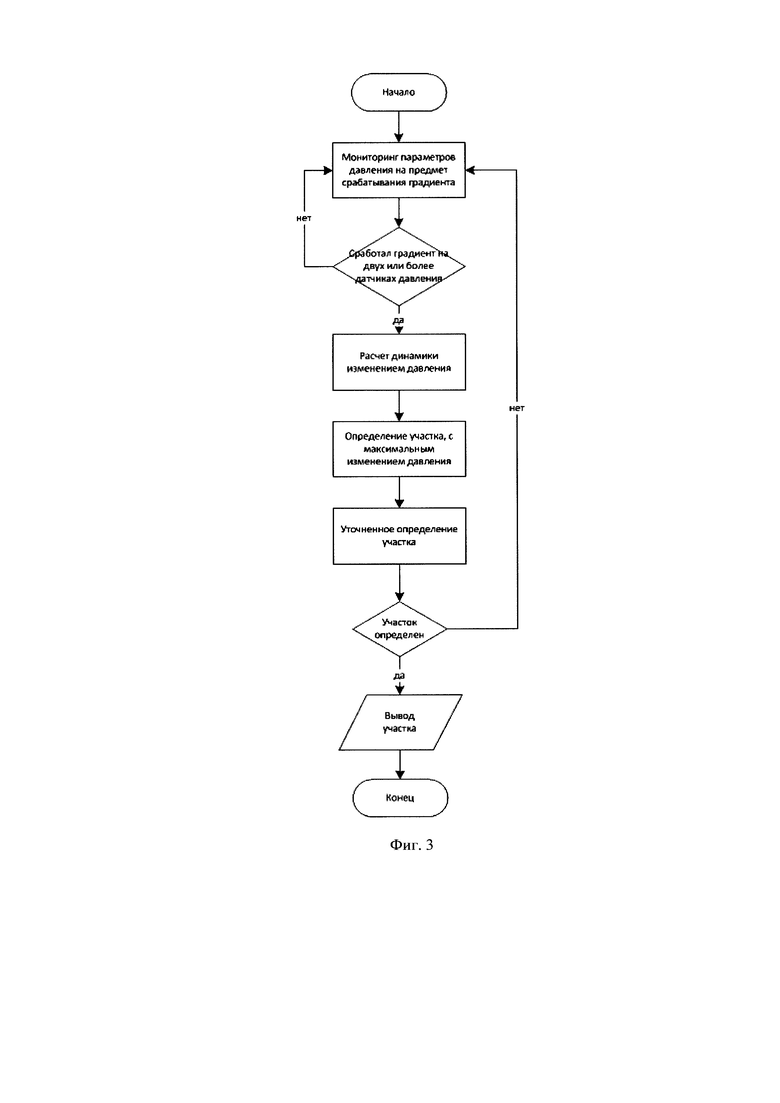
Принцип работы блока определения участка и места разрыва 2 схематично показан на Фиг.2.
В режиме реального времени, автоматически ведется мониторинг всех датчиков давления газопровода на линейных участках и анализ их состояния с помощью модуля 8, считывая параметры из БД РВ 3, которая предназначена для чтения и записи текущих состояний всех объектов нижнего уровня (показания датчиков, положения кранов и др.), путем их опроса коммуникационным сервером. При изменении давления на одном или нескольких датчиках вычисляется текущая скорость изменения давления.
Срабатывание аварийного флага быстрого изменения давления на датчике определяется условиями:

где
W - полученное значение;
t - время получения W;
Wстар - старое значение;
Tстар - время получения Wстар;
ΔWмакс - максимально допустимое отклонение с учетом единицы времени и направления изменения;
Δtмакс - ограничивает временной горизонт контроля.
После срабатывания аварийного флага быстрого изменения давления, на каком-либо датчике давления запускается в работу блок определения участка и места разрыва 9.
Алгоритм функционирования модуля предварительного определения участка 11, входящего в блок 9, показан на Фиг. 3.
Учитывая положения всех линейных кранов, значения всех датчиков давления, а также положения перемычек, соединяющих соседние нитки газопровода, в первые секунды после разрыва определяется участок с максимальным падением давления.
Основными этапами алгоритма являются:
- проверка срабатывания градиента больше чем на одном датчике давления, путем постоянного обращения модуля 8 к БД РВ 3;
- запись значения метки времени срабатывания каждого датчика в БД РВ 3, на основании которой рассчитывается динамика падения давления, путем сравнительного анализа ее значений;
- Определение датчика с максимальным падением давления. Данный датчик является определяющим для предварительной идентификации участка, то есть идентифицируется участок, где он установлен. Участки и датчики давления, установленные на данных участках, интегрируются в БЗ 10, каждый под своим идентификационным номером (далее - ИН).
Модуль уточненного расчета и определения участка 12 разрабатывается отдельно для каждого линейного участка между крановыми площадками МГ, состав контролируемых датчиков давления и запорной арматуры, для интеграции их в БЗ 10, определяется в зависимости от технологической схемы газопровода эксплуатирующего филиала.
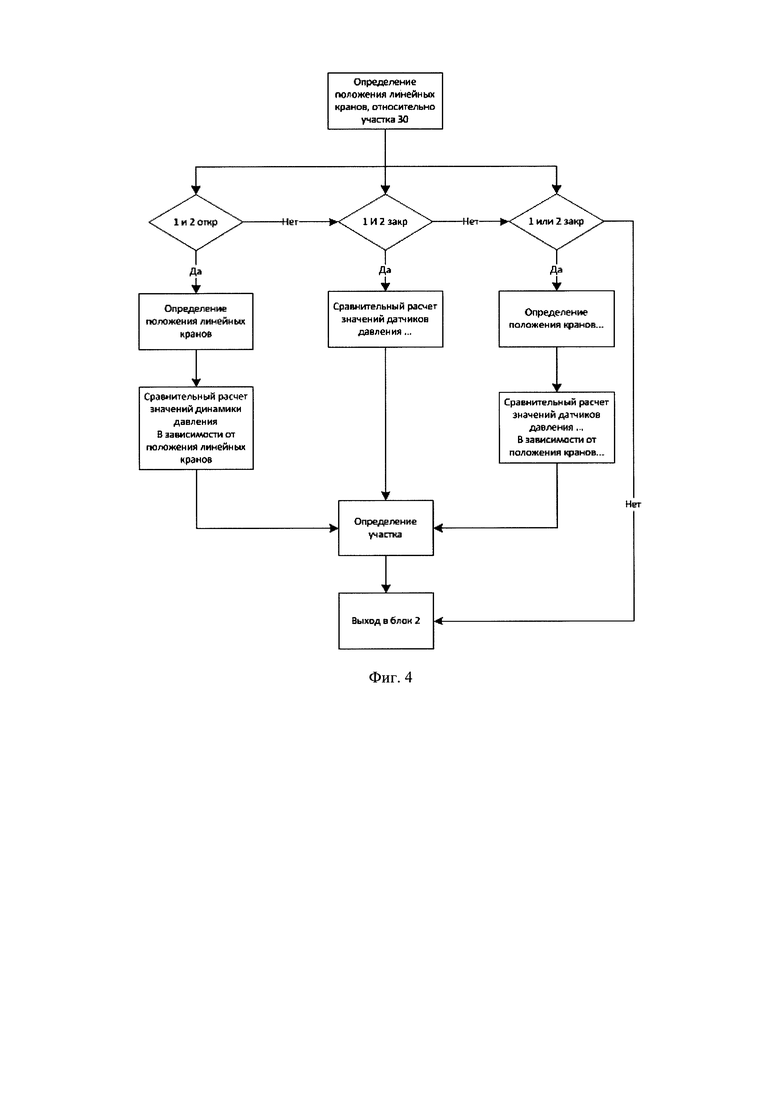
На фиг.4 показан алгоритм функционирования модуля 12 уточненного расчета для определения участка.
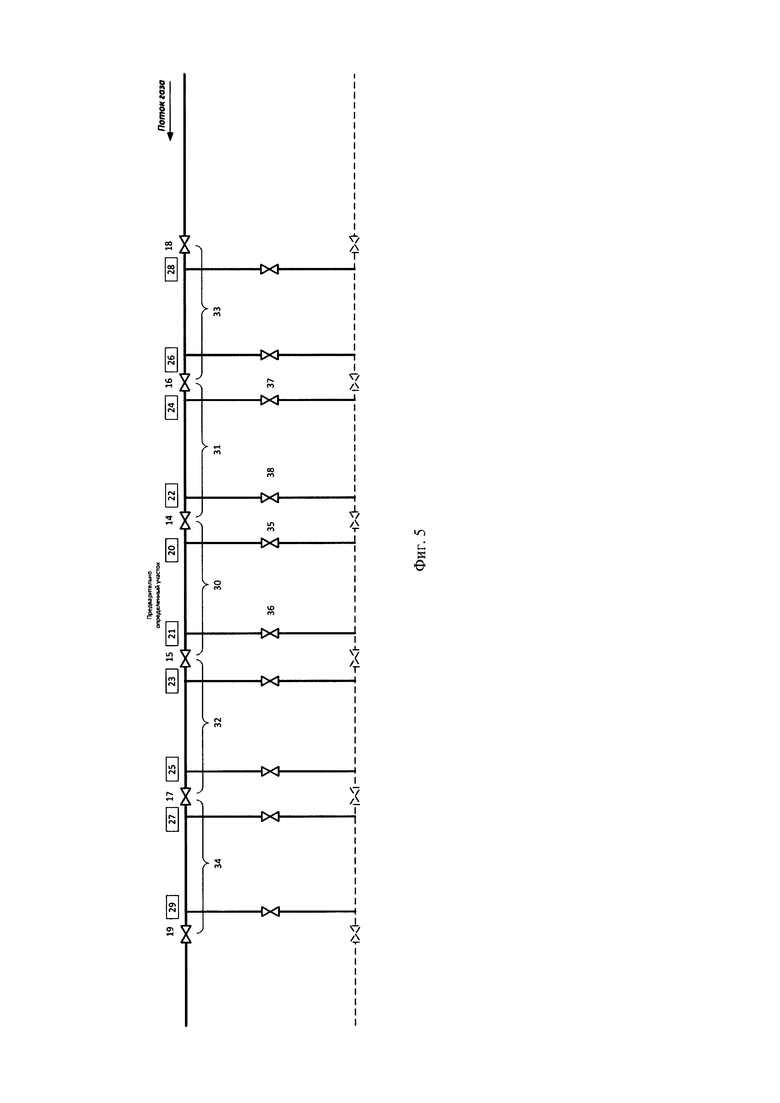
При определении захватываются параметры объектов двух смежных участков с каждой стороны относительно участка, предварительно определенного в модуле 11, схема данного линейного участка, на основании которой ведется расчет, показана на Фиг. 5. При расположении участка вблизи к КС, параметрами для расчета являются давления на входе или выходе КС.
Расчет динамики изменения давления задается функцией зависимости давления от времени ƒ = (P,t) и определяется по формуле:
Wизм = Pстар - Pпол/tполучения.
где:
Wизм - скорость падения давления (динамика изменения), 
Pстар - старое значение давления, кгс/см2;
Pпол - полученное значение давления, кгс/см2;
tполучения - время получения Pпол, сек.
Основными этапами алгоритма модуля 12 уточненного расчета для определения участка являются:
- проверка и определение положения линейных кранов 14 - 19;
- проверка наличия подпитки участков со стороны потока газа;
- определение динамики изменения давления;
- Идентификация участка путем сравнительного анализа динамики падения давления;
Основные условия, возникающие при определении аварийного участка, описываются далее и разрабатываются в зависимости от технологической схемы газопровода.
При открытых кранах 14, 19 выполняется определение положения кранов 16, 17. В зависимости от положения кранов 16, 17 выполняется определение перемычек 37, 38 для определения наличия подпитки со стороны потока газа, если кран 16 закрыт. При наличии подпитки газом участка 31 Wизм на датчике 24 < Wизм на датчике 25.
При отсутствии подпитки в сравнительный анализ включаются только давления датчиков 20, 25 и 21, 24, где Wизм на датчике 20 > Wизм на датчике 25, Wизм на датчике 21 > Wизм на датчике 24, за счет длины участков 31, 32 т.к. расстояние между крановыми площадками соответствует требованиям [1].
При всех открытых кранах определяются две взаимосвязанные системы - до и после участка 30, разделенные кранами 14 и 15, соответственно. Сравнительный анализ между падением давления на датчиках 20, 25, 27, 29 и 21, 22, 24, 26 позволяет методом исключений сократить диапазон поиска и определения участка. Wизм на датчиках 24, 26 < Wизм на датчиках 25, 27, что обусловлено подпиткой со стороны потока газа. Wизм на датчике 20 > Wизм на датчике 29, что обусловлено большой отдаленностью участка 30. Подтверждающими условиями для точного определения участка являются: Wизм на датчике 20 > Wизм на датчике 25, Wизм на датчике 21 > Wизм на датчике 24.
Если на участке закрыт кран 14 (первый по ходу газа), то объекты участка газопровода, находящегося перед ним не учувствуют в расчетах. После определения изменения давления на датчиках, выполняется сортировка массива данных и вычисляется минимальное значение Wизм. При разрыве на участке 30 минимальное падение давления определяется на датчике 29, что обусловлено большой отдаленностью участка 34.
По аналогии ведется расчет при закрытом кране 15, где объекты участка газопровода, находящегося после него не учувствуют в расчетах.
При закрытых кранах 14, 15 и срабатывании аварийного флага быстрого изменения давления на датчиках 20, 21 участок является аварийным, так как уже локализован от смежных участков и является частным случаем. Проверка положения перемычек 35, 36 не требуется, так как расчеты выполняются в модуле 11.
На линейных участках положение линейных кранов может быть различным и зависит от режима транспорта газа. В БЗ 10 интегрируются заранее определенные условия, в зависимости от технологической схемы газопровода. При несовпадении условий с текущим состоянием объектов газопровода, система записывает это состояние в БЗ 10.
После определения аварийного участка запускается модуль определения места разрыва на данном участке 13.
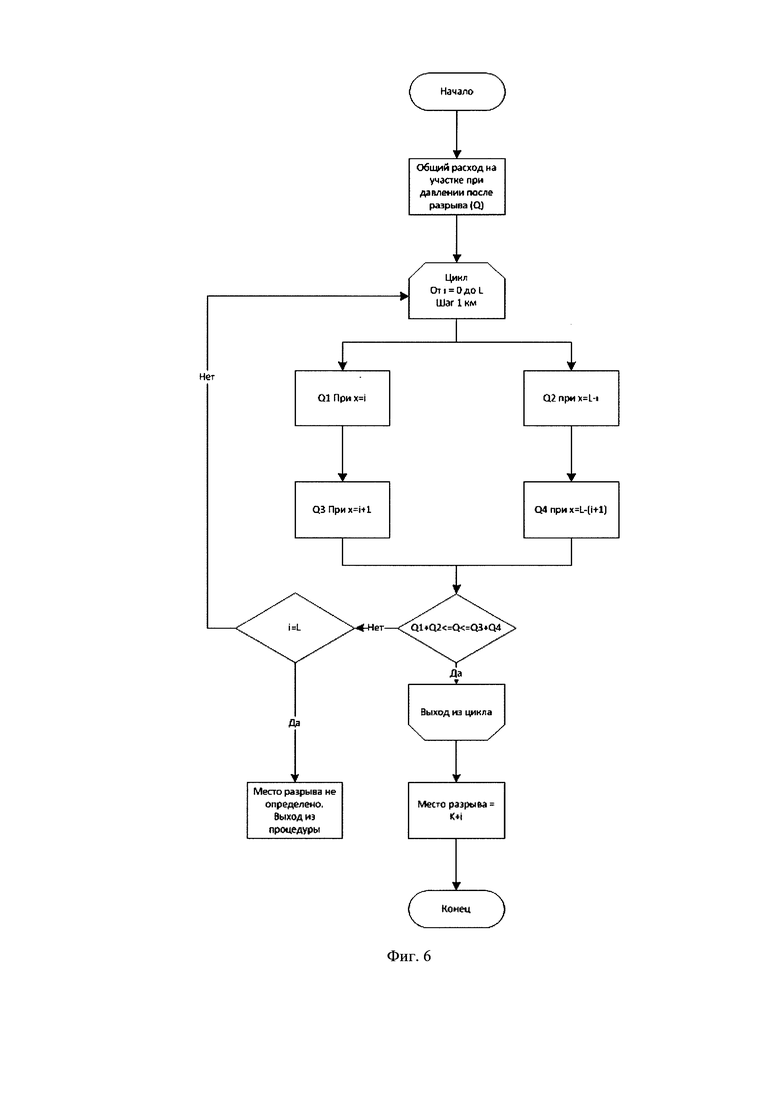
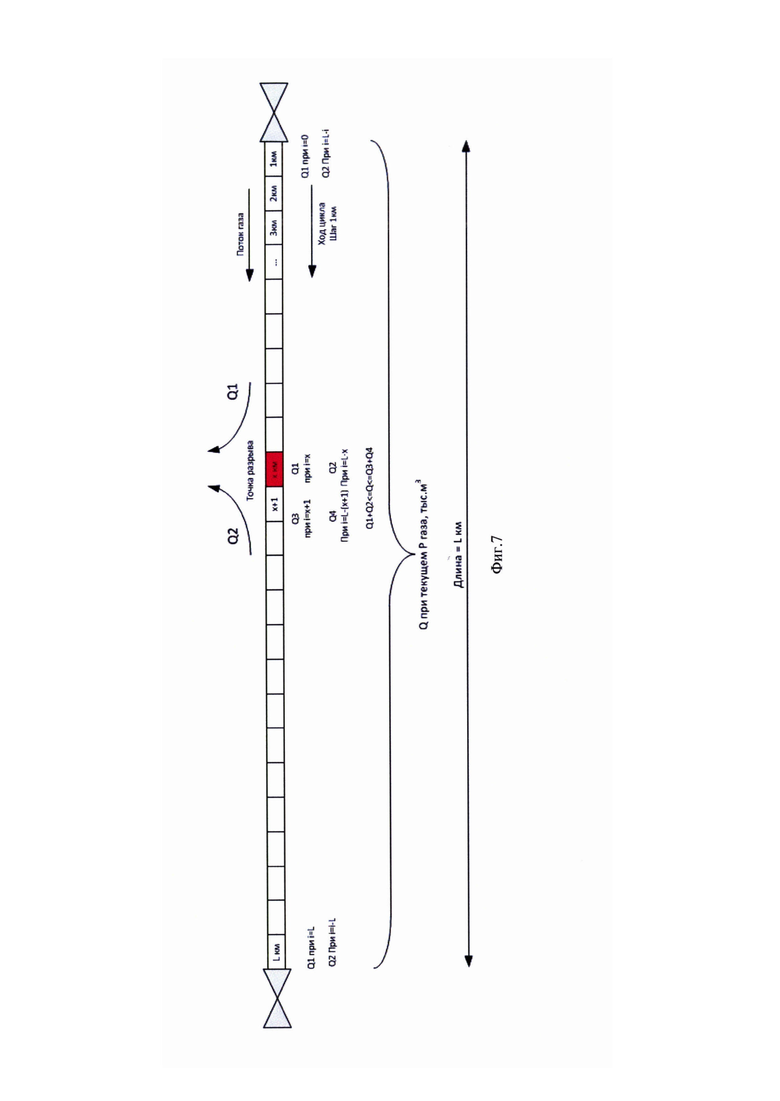
Алгоритм модуля определения точки разрыва 13 на участке МГ показан на Фиг. 6. Схема участка, относительно которого выполняется алгоритм, показана на Фиг. 7, где длины участков и геометрические параметры трубопроводов интегрируются в БЗ 10 изначально.
Для определения места разрыва используется формула частичного опорожнения участков (3) от крановой площадки до места разрыва, с каждой стороны аварийного участка [2]:
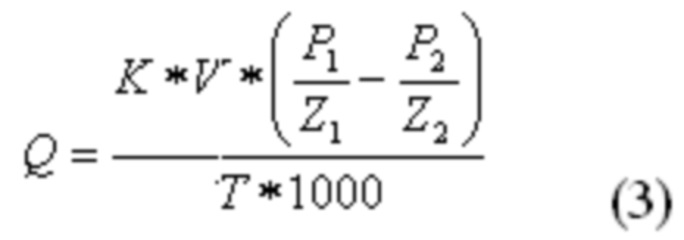
где:
K – коэффициент, равный 2892, град/МПа;
V - геометрический объем участка, м3;
T - температура газа, K;
P1 - давление газа до аварии, или предыдущее значение после каждого срабатывания градиента (кгс/см2);
P2 - давление газа после срабатывания градиента (кгс/см2);
Z1, Z2 - коэффициент сжимаемости газа при P1, P2 соответственно.
Участок делится на отрезки длиной в 1 км, в цикле, увеличивая расстояние на 1 км, т.е. i=i+1, где i - шаг цикла. Расход газа Q1, Q2 рассчитывается при текущем давлении, с каждой стороны. Расход Q3, Q4 рассчитывается аналогично, при условии i=i+2. Точкой разрыва будет отрезок, где общий объем газа Q, рассчитанный согласно [3] при текущем давлении, будет входить в диапазон суммарного расхода газа с каждой стороны участка от точки разрыва Q1+Q2<=Q<=Q3+Q4. Длина участка выражается из его геометрического объема, из формулы частичного опорожнения участка (3).
Коэффициенты сжимаемости определяются согласно [4], где плотность газа при стандартных условиях, кг/м3, в соответствии с данными химической лаборатории изначально вносится в БЗ 10 и обновляется в соответствии с заданным периодом.
Место разрыва определяется, как километраж начала участка K (вносится изначально в расчет) + значение параметра i из цикла, при котором выполнилось условие Q1+Q2<=Q<=Q3+Q4.
После определения аварийного участка и точки разрыва газопровода, система переводит его в аварийное состояние, то есть переменной с типом сигнала «авария», определяющей данный участок из БЗ 10, согласно ИН, присваивается логическое значение «ИСТИНА». На мониторе АРМ диспетчера 5 и системы отображения коллективного пользования 6 на технологической схеме газопровода данный участок идентифицируется, как аварийный, путем изменения цвета и визуализацией точки разрыва, с выдачей звуковой сигнализации и записью сообщения в журнал событий.
В зависимости от сложности и состояния технологической части участка МГ есть возможность в БЗ 10 интегрировать алгоритмы автоматической перестановки запорной арматуры, для локализации участка под контролем сменного персонала диспетчерской службы.
Эффект изобретения проявляется в том, что использование данной системы позволяет в режиме реального времени минимизировать время идентификации разрыва на линейном участке МГ, с максимальной точностью определить данный участок и точку разрыва, для своевременной его локализации.
Эффективными показателями изобретения являются:
- сокращение экономических затрат, связанных с выбросом природного газа в атмосферу;
- повышение надежности и энергоэффективности транспорта газа на объектах дочерних обществ и филиалов ПАО «Газпром»;
- повышение производительности и безопасности технологических процессов транспорта газа;
- уменьшение влияния технологического процесса на экологическую составляющую атмосферы.
Список источников
1. СНИП 2.05.06.85* «Магистральные трубопроводы».
2. Методика “Определения расхода газа на собственные нужды при эксплуатации приграничных участков магистрального газопровода, газопроводов отводов и ГРС между приграничными ГИС и границами Россия - Украина, Беларусь - Украина” согласно п.1.6 “Ликвидация аварий на газопроводах”.
3. Волков М.М. Справочник работника нефтяной и газовой промышленности - 2-е изд., перераб. и доп. - М.: Недра, 1989. - 289 с.: ил.
4. ГОСТ 30319.2-96 Газ природный. Методы расчета физических свойств. Определение коэффициента сжимаемости.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ РАЗРЕШЕННОГО РАБОЧЕГО ДАВЛЕНИЯ В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ | 2020 |
|
RU2755406C1 |
| Способ обнаружения нештатной ситуации на многониточном магистральном трубопроводе | 2019 |
|
RU2700491C1 |
| ЦЕНТРАЛИЗОВАННАЯ СИСТЕМА ПРОТИВОАВАРИЙНОЙ АВТОМАТИКИ МАГИСТРАЛЬНЫХ НЕФТЕПРОВОДОВ И НЕФТЕПРОДУКТОПРОВОДОВ | 2015 |
|
RU2588330C1 |
| Индивидуальный диспетчерский тренажер для тренинга оперативно-диспетчерского персонала магистральных нефтепроводов | 2015 |
|
RU2639932C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2020 |
|
RU2760167C1 |
| СИСТЕМА "СМАРТ-МОНИТОРИНГ" ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ЗАПОРНОЙ АРМАТУРЫ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ | 2021 |
|
RU2752449C1 |
| СИСТЕМА РЕГИСТРАЦИИ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ И ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТРУБОПРОВОДНОЙ АРМАТУРОЙ | 2024 |
|
RU2833186C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ И АВТОМАТИЧЕСКОЙ ЗАЩИТЫ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2020 |
|
RU2750479C1 |
| Учебно-испытательная установка по настройке схемы управления краном магистрального газопровода с системой автоматического управления | 2023 |
|
RU2830931C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС УПРАВЛЕНИЯ КРАНОМ НА ГАЗОКОНДЕНСАТОПРОВОДЕ | 2019 |
|
RU2718101C1 |
Изобретение относится к области автоматизированных систем управления технологическими процессами и используется для мониторинга и диагностики линейных участков между крановыми площадками магистрального газопровода при аварийных ситуациях, связанных с его разрывом. Одной из основных аварийных ситуаций на магистральном газопроводе является его разрыв или утечка газа. Технический результат - минимизация времени идентификации участка и места разрыва магистрального газопровода в режиме реального времени, при возможных аварийных ситуациях. Поставленная задача решается, а технический результат достигается путем разработки интеллектуальной системы помощи принятия диспетчерских решений для точного определения участка и места разрыва на газопроводе в режиме реального времени. Данная система является комплексным расширением функциональных возможностей системы диспетчерского контроля и управления реальным временем. 7 ил.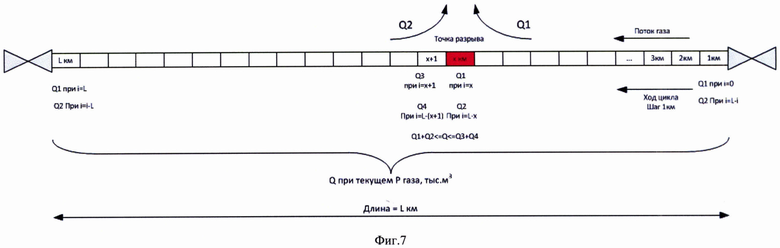
Интеллектуальная система помощи принятия диспетчерских решений для точного определения участка и места разрыва магистрального газопровода в режиме реального времени, содержащая блок комплекса программно-технических средств, в состав которых входит серверное оборудование, автоматизированное рабочее место диспетчера, системы отображения коллективного пользования, устройства вывода информации, блок определения участка и места разрыва газопровода, в состав которого входит модуль мониторинга и диагностики состояния датчиков давления, блок определения участка и места разрыва, состоящего из модуля предварительного определения участка, модуля уточненного определения участка, модуля определения места разрыва на участке, предназначенного для определения точки разрыва на аварийном участке, база знаний, предназначенная для хранения набора условий определения аварийного участка и технических параметров трубопровода, включающих в себя размеры и длины участков, а также в состав данной системы входит база данных реального времени системы диспетчерского контроля и управления.
| СПОСОБ ДИАГНОСТИКИ ГЕРМЕТИЧНОСТИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2010 |
|
RU2457392C1 |
| СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2563419C2 |
| СИСТЕМА ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА НА УЧАСТКАХ НАДЗЕМНЫХ ПЕРЕХОДОВ | 2013 |
|
RU2562602C2 |
| US 5416724 A1, 16.05.1995. | |||

