Изобретение относится к ракетной технике, в которой создание жидкостных ракетных двигателей с минимально возможными массой, продольными и радиальными габаритами является всегда актуальным, особенно для жидкостных ракетных двигателей верхних ступеней ракет-носителей, а более конкретно, к устройству многокамерного жидкостного ракетного двигателя с дожиганием с управляемым вектором тяги.
Известен однокамерный жидкостный ракетный двигатель с дожиганием генераторного газа с управляемым вектором тяги, содержащий камеру с узлом подвески для качания посредством приводов, турбонасосный агрегат, газогенератор, агрегаты автоматики и регулирования, гибкую магистраль подвода генераторного газа с избытком одного из компонентов к смесительной головке камеры и сопла управления, соединенные с затурбинной полостью турбины турбонасосного агрегата с помощью магистралей с установленными на них пуско-отсечными клапанами (см. патент РФ №2441170 от 10.11.2010 г. по МПК F02K 9/84).
В таком однокамерном жидкостном ракетном двигателе с дожиганием генераторного газа с управляемым вектором тяги, особенно верхних ступеней ракет, для уменьшения осевых габаритов приходится выполнять сопло камеры с выдвижным насадком, что без того усложняет конструкцию наличием приводов для качания и систем управления механическим качанием камеры. Гибкий трубопровод большого диаметра для обеспечения прочности требует дополнительного охлаждения компонентом топлива, а наличие сильфона с таким диаметром требует значительного периода отработки и значительной массы силовой части карданного узла сильфона, работающего при повышенной температуре, обусловленной перетеканию тепла в районе крайних торцев конструкции крепления концов сильфона, хотя и пониженной по сравнению с температурой генераторного газа в турбине турбонасосного агрегата. Для жидкостных ракетных двигателей с дожиганием генераторного газа с управляемым вектором тяги верхних ступеней ракет потребности в управляющих усилиях значительно ниже, чем для нижних и особенно первых ступеней ракет, и при значительной тяге камеры незначительное управляющее усилие требует малых углов поворота камеры, что связано с неизбежной абсолютной погрешностью управления и постоянной корректировкой траектории поворотом камеры. Для современных технологий изготовления многокамерных жидкостных ракетных двигателей с дожиганием с управляемым вектором тяги достижение минимальной разнотяговости камер является выполнимой задачей, и потребность значительных управляющих усилий для коррекции траектории значительно снижается. Поэтому выполнение камер с узлом подвески, создающих основную силу тяги, с дополнительной функцией управления вектором тяги с малыми управляющими усилиями приводит к неоправданному росту массы жидкостных ракетных двигателей с дожиганием генераторного газа с управляемым вектором тяги.
Известны также многокамерные жидкостные ракетные двигатели с дожиганием генераторного газа с управляемым вектора тяги, содержащие газогенератор, турбонасосный агрегат, несколько неподвижно относительно рамы камер, расположенных в плоскостях стабилизации, соединенных газоводами с затурбинной полостью турбонасосного агрегата, источник инертного газа в виде баллона и сопла управления, соединенные с затурбинной полостью турбонасосного агрегата входами магистралей с установленными на них пуско-отсечными клапанами (книга «Научно-технические разработки КБ «Салют» 2012-2013 гг. Н 34 (Вып. 4) Под ред. Ю.О. Бахвалова. М., «Машиностроение-Полет», стр. 218-223, рис. 1-6) - прототип.
В таком многокамерном жидкостном ракетном двигателе с дожиганием с управлением вектором тяги управление по тангажу, крену и рысканию осуществляется включением импульсной подачи генераторного газа с дозированием массового расхода и дозированной длительностью импульса тяги, достаточной для коррекции траектории движения, от затурбинной полости турбонасосного агрегата к соплам управления, собранным в четыре блока по три сопла, расположенным равномерно по главным плоскостям стабилизации. Изготовление многокамерных жидкостных ракетных двигателей с дожиганием с управляемым вектором тяги с использованием современных технологий изготовления и более высокоточного оборудования достижение минимальной разнотяговости камер является выполнимой задачей и потребность значительных управляющих усилий для коррекции траектории значительно снижается.
Однако, при разделении ступеней потребность значительных импульсов подачи газа, отбираемых от затурбинной полости и транспортировка его к удаленным на периферию к соплам управления, собранным в блоки совместно с клапанами управления, возникает при запуске турбины турбонасосного агрегата, камер, так как в период от команды на разделение и команды на запуск двигателя отсутствует управление положением ступени, и к моменту включения сопел для создания управляющего усилия потребность в массовом расходе генераторного газа для выравнивания ступени, изменившей положение при разделении, является несколько повышенной, что снижает экономичность при работе в таком многокамерном жидкостном ракетном двигателе с дожиганием с управлением вектором тяги.
Таким образом, указанное техническое решение не всегда позволяет решить задачу по повышению точности управления вектором тяги многокамерного жидкостного ракетного двигателя с дожиганием с управляемым вектором тяги из-за отсутствия формирования управляющих усилий на нестационарном режиме разделения до режима запуска многокамерного жидкостного ракетного двигателя с дожиганием с управлением вектором тяги, что приводит к снижению экономичности создания управляющих усилий на последующем нестационарном режиме управления отбором генераторного газа от затурбинной полости к соплам управления.
Задачей предлагаемого изобретения является устранение вышеуказанных недостатков и повышение точности управляющего усилия с помощью сопел управления за счет обеспечения управления перед запуском и на запуске, повышения экономичности управления, а также после выключения многокамерного жидкостного ракетного двигателя с дожиганием с управляющим вектором тяги.
Приведенные выше недостатки исключены в предлагаемом изобретении.
Указанная выше задача изобретения решается тем, что в нем блоки сопел управления выполнены в виде пар коаксиально установленных сопел, причем те из них, которые соединены с затурбинной полостью турбонасосного агрегата, расположены в центральных частях, а периферийные сопла соединены с источником инертного газа с помощью магистралей с установленными на них пуско-отсечными клапанами.
Указанная выше задача изобретения решается также тем, что периферийные сопла блока управления выполнены с возможностью перемещения с помощью приводов относительно внутреннего с обеспечением регулирования коаксиального зазора между соплами.
Указанная выше задача изобретения решается также тем, что периферийные сопла блока управления выполнены в виде сопел внешнего расширения, причем наружные части сопел внешнего расширения выполнены в виде кольцевых обечаек, установленных с возможностью перемещения относительно центральных сопел, а внешние части сопел внутренних сопел выполнены и спрофилированы в виде центральных тел, образующих кольцевые щели с кольцевыми обечайками.
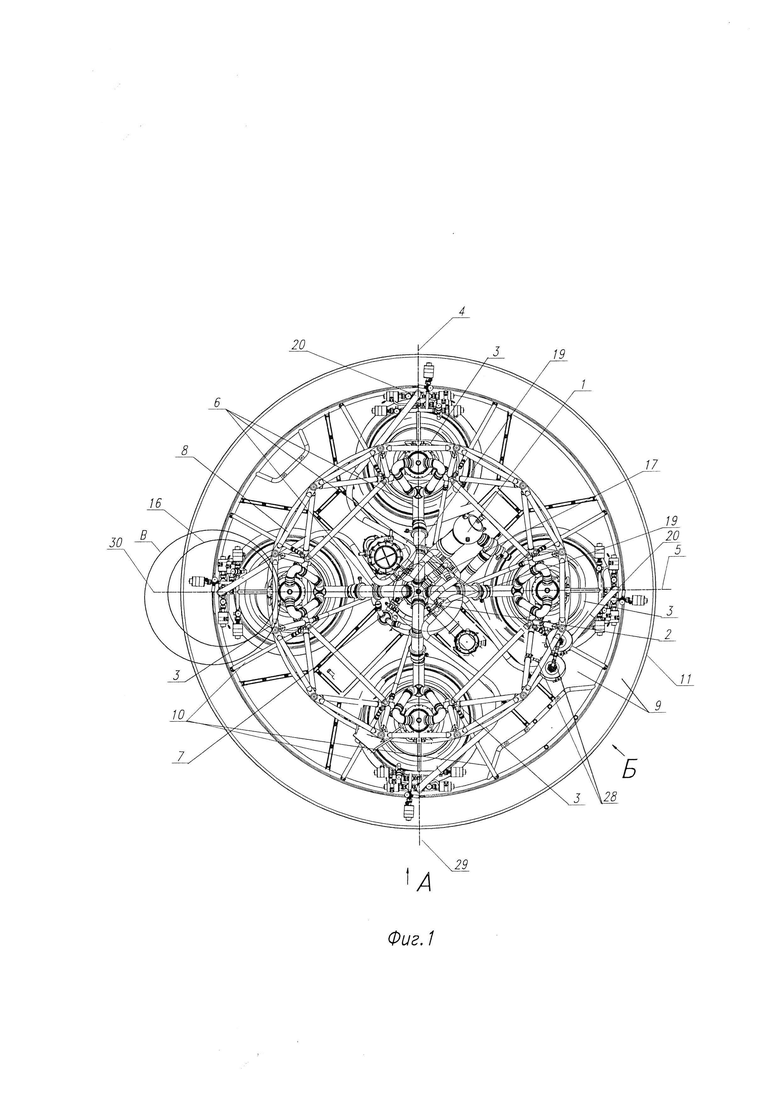
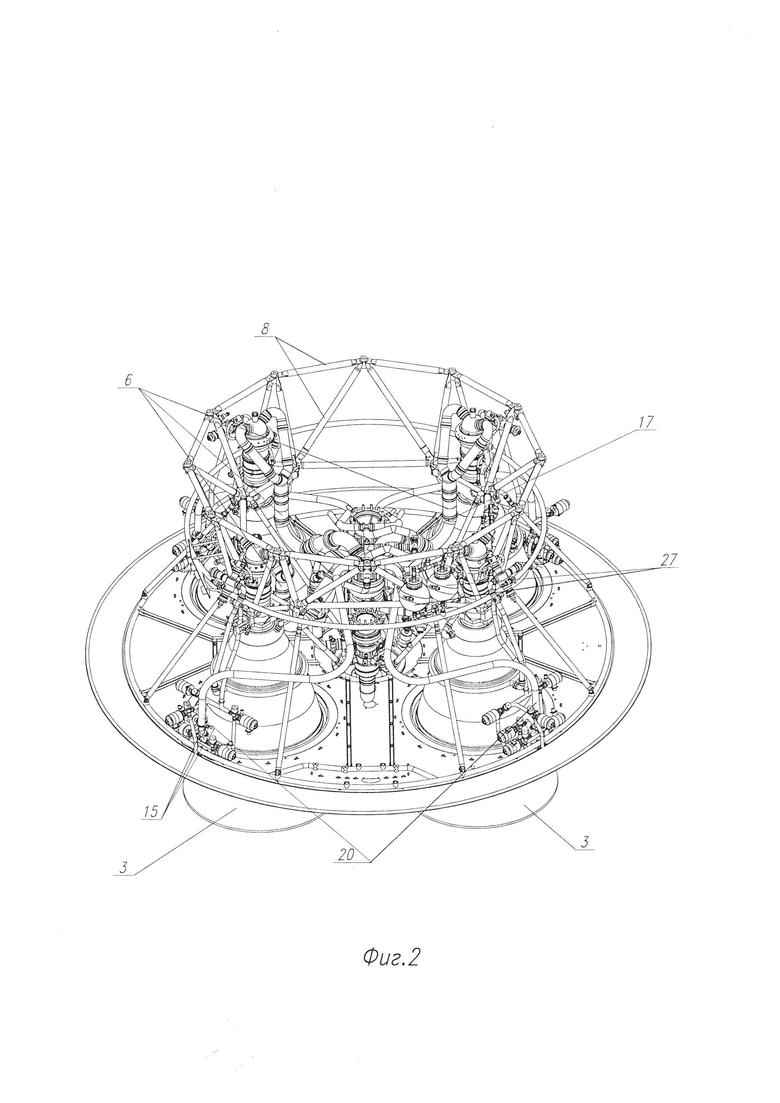
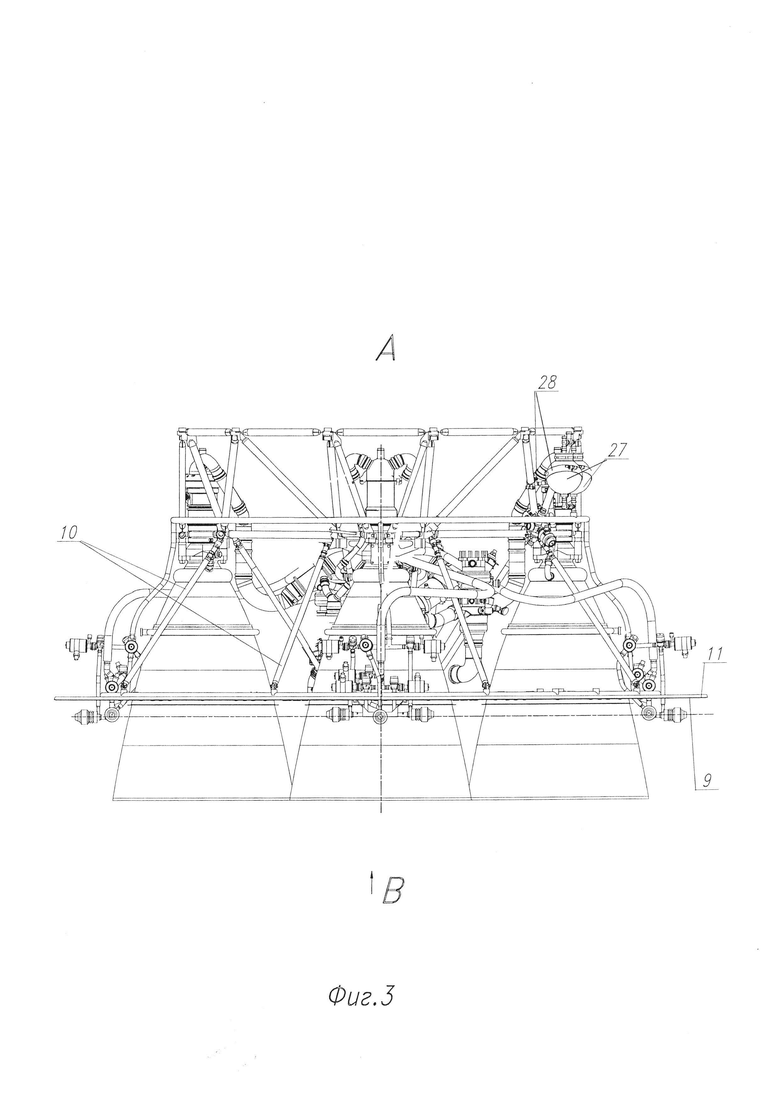
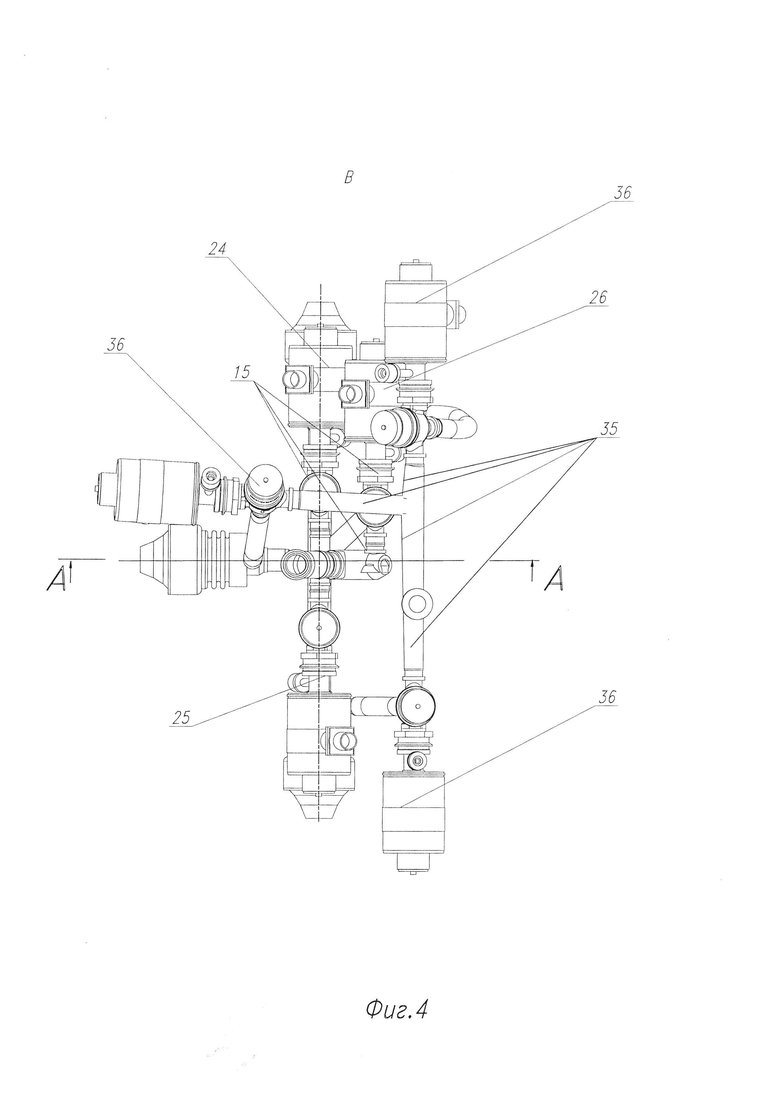
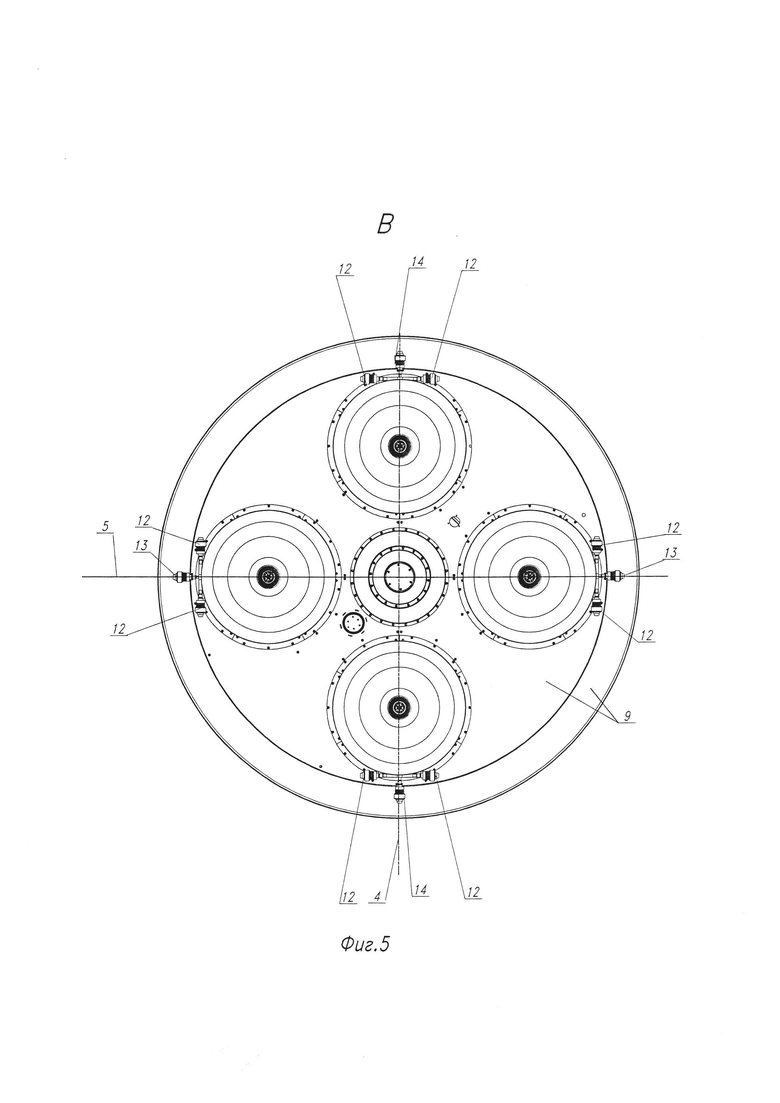
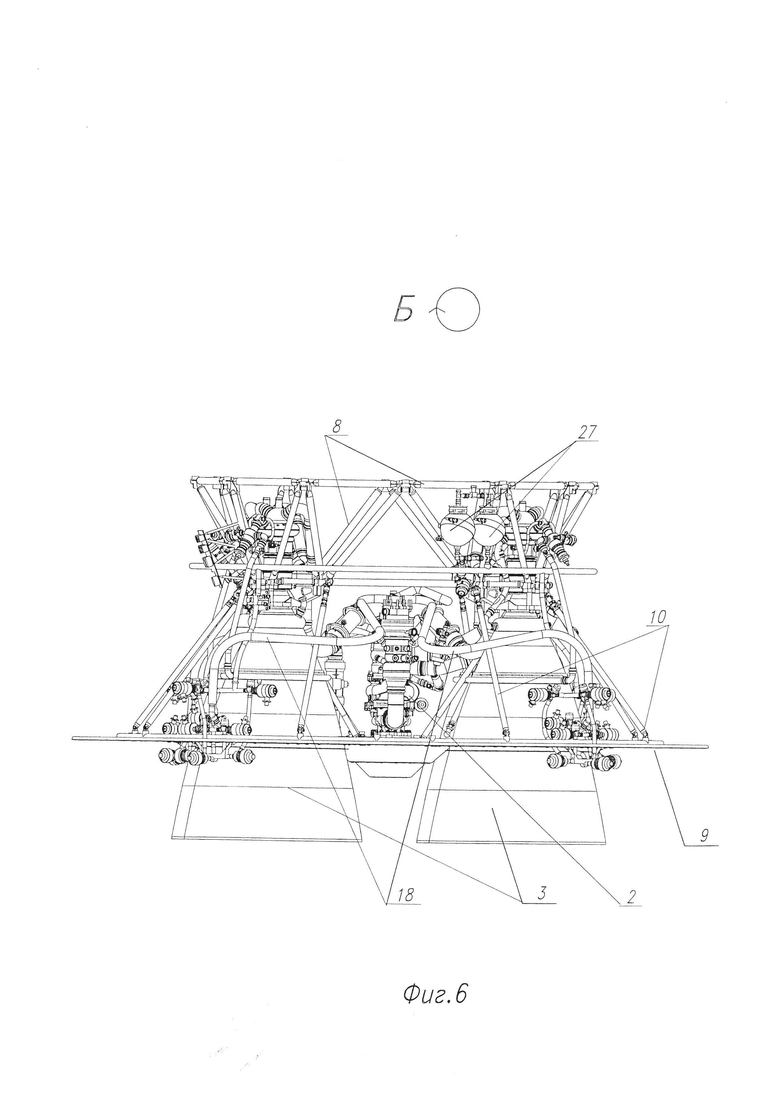
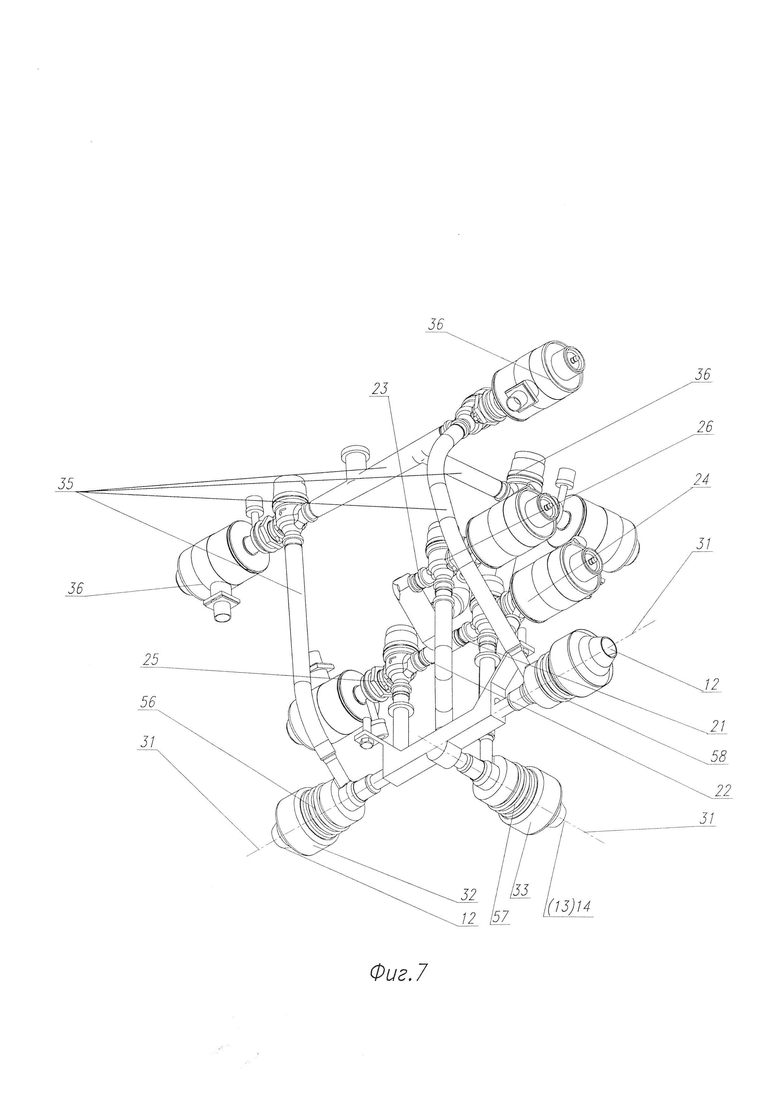
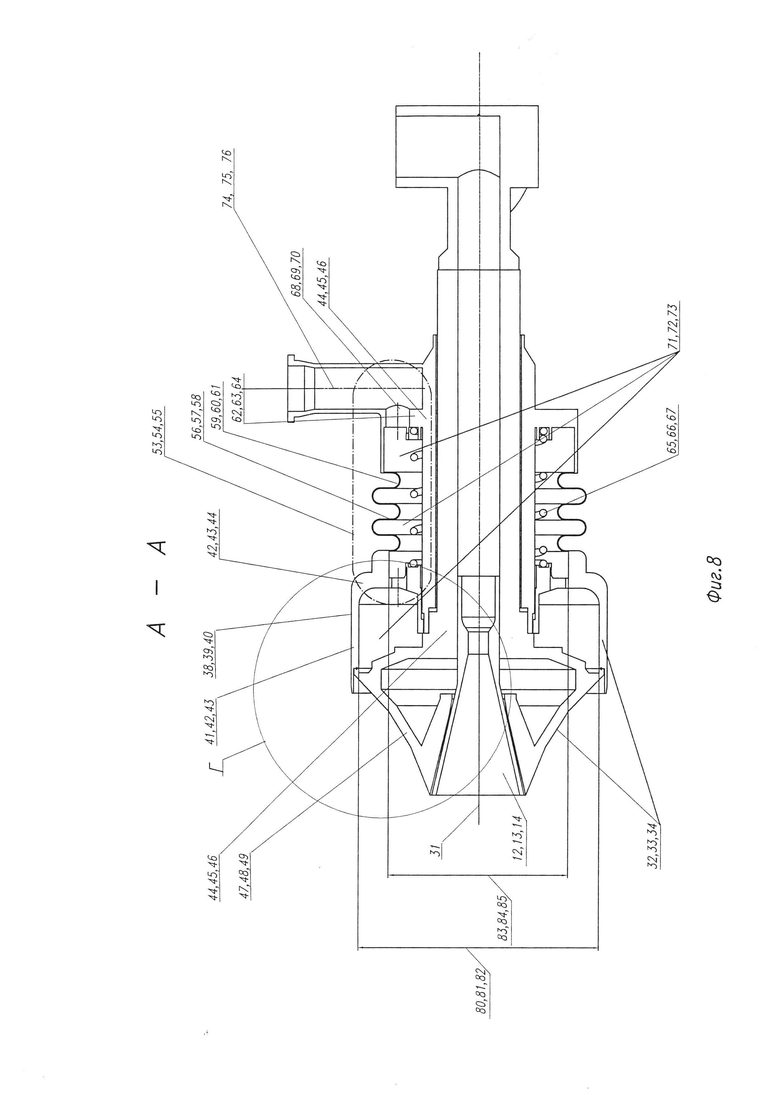
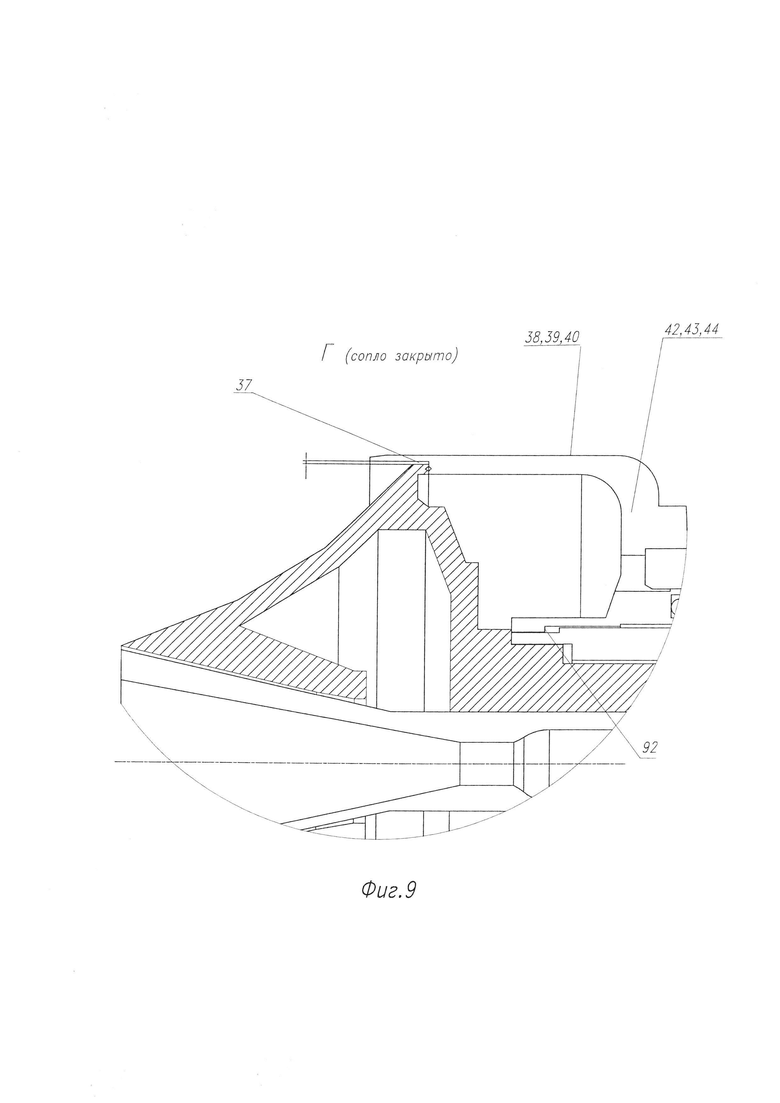
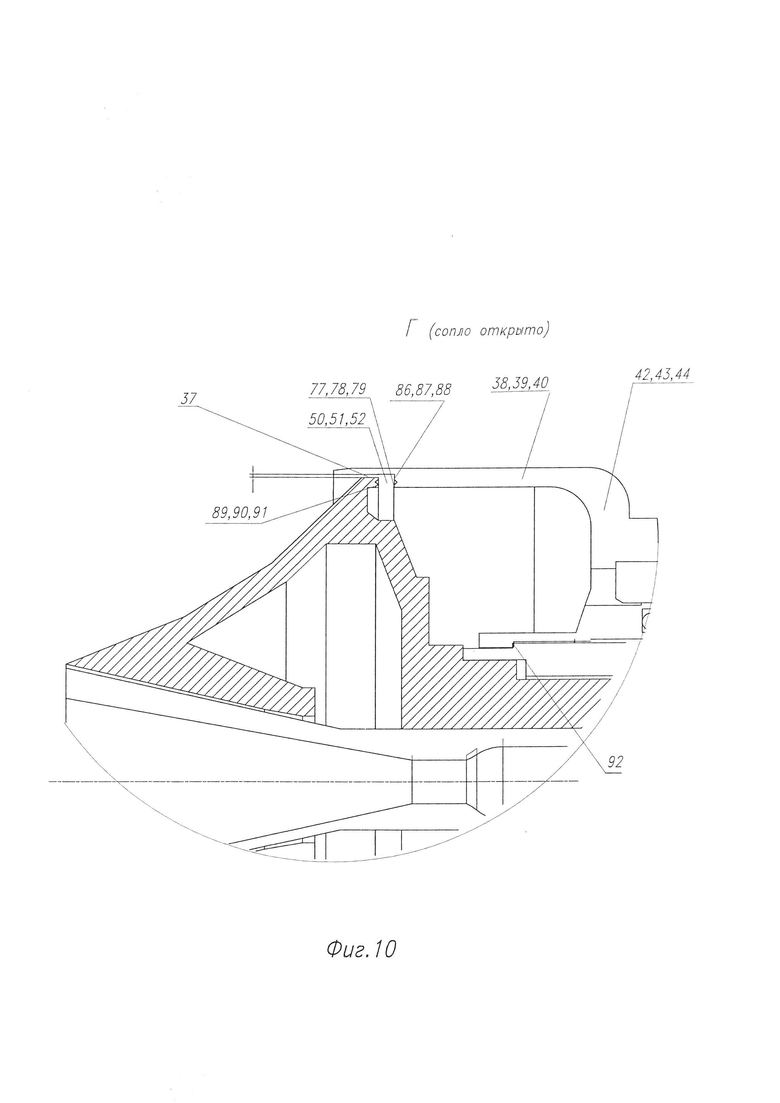
Предлагаемое изобретение представлено на чертеже фиг. 1-10 (фиг. 1 - проекционный вид сверху на многокамерный жидкостный ракетный двигатель с дожиганием с управляемым вектором тяги с изображением неподвижных камер, рамы, турбонасосного агрегата, блоков сопел управления; фиг. 2 - аксонометрический вид многокамерного жидкостного ракетного двигателя с дожиганием с управляемым вектором тяги с изображением мембранного клапана на магистрали подвода генераторного газа к блокам сопел управления, рамы, газоводов, трубопроводов, камер; фиг. 3 - вид сбоку на многокамерный жидкостный ракетный двигатель с дожиганием с управляемым вектором тяги с изображением камер, рамы, донной защиты и тяг ее крепления к раме, источника инертного газа; фиг. 4 - вид сверху на блок управления с изображением пуско-отсечных клапанов, разветвленных магистралей; фиг. 5 - вид снизу на многокамерный жидкостный ракетный двигатель с изображением сопел управления вектором тяги, донной защиты; фиг. 6 - вид сбоку под острым углом к главным плоскостям стабилизации на многокамерный жидкостный ракетный двигатель с дожиганием с управляемым вектором тяги с изображением камер, турбонасосного агрегата, рамы, донной защиты и тяг ее крепления к раме, источника инертного газа; фиг. 7 - аксонометрический вид блока управления с изображением сопел управления креном, рысканием и тангажем с пуско-отсечными клапанами управления ими; фиг. 8 - продольный разрез узла периферийных и центральных сопел блока управления с изображением сильфона, пружины, кольцевой обечайки и внешней части центрального сопла с центральным телом для управления с помощью инертного газа; фиг. 9 - местный разрез периферийных сопел для подачи инертного газа в закрытом положении; фиг. 10 - местный разрез периферийных сопел для подачи инертного газа в открытом положении с изображением зазоров и ограничителя положения периферийного сопла), где показаны следующие агрегаты:
1. Газогенератор;
2. Турбонасосный агрегат;
3. Камера;
4. Первая плоскость стабилизации;
5. Вторая плоскость стабилизации;
6. Газовод;
7. Затурбинная полость турбонасосного агрегата;
8. Рама;
9. Донная защита;
10. Тяга;
11. Периферия донной защиты;
12. Сопло управления креном;
13. Сопло управления тангажем;
14. Сопло управления рысканием;
15. Разветвленная магистраль;
16. Блок управления;
17. Мембранный клапан;
18. Магистраль;
19. Вход магистрали;
20. Выход магистрали;
21. Вход пуско-отсечного клапана;
22. Вход пуско-отсечного клапана;
23. Вход пуско-отсечного клапана;
24, 25, 26. Пуско-отсечной клапан;
27. Источник инертного газа;
28. Кронштейн;
29, 30 Плоскость стабилизации;
31. Центральная часть блока управления;
32, 33, 34. Периферийное сопло;
35. Магистраль;
36. Пуско-отсечной клапан;
37. Коаксиальный зазор;
38, 39, 40. Наружная часть сопла;
41, 42, 43. Кольцевая обечайка;
44, 45, 46. Внешняя часть внутреннего сопла;
47, 48, 49. Центральное тело;
50, 51, 52. Кольцевая щель;
53, 54, 55. Привод периферийного сопла;
56, 57, 58. Сильфон;
59, 60, 61. Первый торец сильфона;
62, 63, 64. Внешний кольцевой бурт;
65, 66, 67. Пружина;
68, 69, 70. Сквозной канал;
71, 72, 73. Полость;
74, 75, 76. Патрубок;
77, 78, 79. Кольцевая торцевая стенка;
80, 81, 82. Больший диаметр;
83, 84, 85. Малый диаметр;
86, 87, 88. Посадочное кольцевое место кольцевой торцевой стенки;
89, 90, 91. Посадочное кольцевое место наружного корпуса внутреннего сопла;
92. Ограничитель.
Многокамерный жидкостный ракетный двигатель с дожиганием с управляемым вектором тяги, содержит газогенератор 1, турбонасосный агрегат 2, несколько камер 3, расположенных - две в первой главной плоскости стабилизации 4, и две другие во второй главной плоскости стабилизации 5, соединенных газоводами 6 с затурбинной полостью турбонасосного агрегата 7. Камеры 3 закреплены неподвижно за раму 8. В нижней части двигателя установлена донная защита 9, закрепленная с помощью тяг 10 за раму 8. По периферии 11 донной защиты 9 установлены сопла управления креном 12, сопла управления тангажем 13 и сопла управления рысканием 14, объединенные вместе с разветвленными магистралями 15 в блоки управления 16. Вход каждого блока управления 16 соединен с затурбинной полостью турбонасосного агрегата 7 через мембранный клапан 17 магистралью 18. Вход 19 магистрали 18 соединен с затурбинной полостью турбонасосного агрегата 7, а выход 20 - с входами 21, 22, 23 пуско-отсечных клапанов 24, 25 и 26. Источник инертного газа 27, например гелия, закреплен с помощью кронштейна 28 на раме 8. Четыре блока сопел управления 16 расположены в плоскостях стабилизации 29 и 30, совпадающих с соответствующими главными плоскостями стабилизации 4 и 5.. Блоки сопел управления 16 выполнены в виде пар коаксиально установленных сопел, причем сопла 12, 13 и 14, соединенные с затурбинной полостью турбонасосного агрегата, расположены в центральных частях 31, а периферийные сопла 32, 33 и 34 соединены с источником инертного газа 27 с помощью магистралей 35 с установленными на них пуско-отсечными клапанами 36. Периферийные сопла 32, 33 и 34 блока управления 16 выполнены с возможностью перемещения с помощью приводов относительно сопел 12, 13 и 14, расположенных в центральных частях 31 с обеспечением регулирования коаксиального зазора 37 между периферийными соплами 32 и расположенными в центральных частях 12, соответственно между периферийными соплами 33 и расположенными в центральных частях 13, и соответственно между периферийными соплами 34 и расположенными в центральных частях 14. Периферийные сопла 32, 33 и 34 блока управления 16 выполнены в виде сопел внешнего расширения, причем наружные части сопел 38, 39 и 40 внешнего расширения выполнены в виде кольцевых обечаек 41,42 и 43, установленных с возможностью перемещения относительно центральных сопел 12, 13 и 14, а внешние части 44, 45 и 46 внутренних сопел 12, 13 14 выполнены и спрофилированы в виде центральных тел 47, 48 и 49, образующих кольцевые щели 50, 51 и 52 с кольцевыми обечайками 41, 42 и 43. Привод 53, 54 и 55 периферийных сопел 32, 33 и 34 выполнен в виде сильфона 56, 57 и 58, закрепленного неподвижно первым торцем 59, 60 и 61 за внешние кольцевые бурты 62, 63 и 64 на корпусах внешних частей 44, 45 и 46 сопел 12, 13 и 14, а вторым - за кольцевые обечайки 41,42 и 43, связанные оттарированными пружинами растяжения (сжатия) 65, 66 и 67 с внешними кольцевыми буртами 62, 63 и 64. Во внешних кольцевых буртах 62, 63 и 64 выполнены сквозные осевые каналы 68, 69 и 70 с одной стороны связанные с полостью 71, 72 и 73, образованную сильфоном 56, 57 и 58, кольцевыми обечайками 41,42 и 43 и корпусом внешней части 44, 45 и 46 сопел 12, 13 и 14, а другой - с полостью патрубка 74, 75 и 76, соединенного с помощью магистралей 35 с установленными на них пуско-отсечными клапанами 36 с источником инертного газа 27. Кольцевые обечайки 41, 42 и 43 со стороны кольцевых щелей 50, 51 и 52 снабжены кольцевыми торцевыми стенками 77, 78 и 79 с большим диаметром 80, 81 и 82, большим, чем диаметр полуволн сильфона 56, 57 и 58, и малым диаметром 83, 84 и 85, также больше максимального диаметра сильфона 56, 57 и 58. Кольцевые торцевые стенки 77, 78 и 79 на большем диаметре имеют посадочные кольцевые места 86, 87 и 88, взаимодействующие с посадочными местами 89, 90 и 91 на максимальном диаметре профилированного наружного корпуса внутреннего сопла (центрального тела) с образованием кольцевых щелей 50, 51 и 52. Причем, оттарированная пружина 65, 66 и 67 выполнена с жесткостью, обеспечивающей самопроизвольное открытие полости 71, 72 и 73 под воздействием давления инертного газа на площадь поверхности, обусловленной разностью квадратов большего 80, 81, 82 и меньшего диаметров 83, 84, 85 и поступление инертного газа в сопла внешнего расширения для создания управляющего усилия с фиксацией открытого положения периферийных сопел с помощью ограничителя 92. При коаксиальном расположении сопел управления креном 12 и периферийных сопел 32, сопел управления тангажем 13 и периферийных сопел 33, сопел управления рысканием 14 и периферийных сопел 34 на всех режимах сохраняется неизменным положение векторов управляющих усилий, как при управлении с помощью генераторного газа, так и при управлении с помощью инертного газа.
Многокамерный жидкостный ракетный двигатель с дожиганием с управляемым вектором тяги работает следующим образом.
Перед запуском многокамерного жидкостного ракетного двигателя с дожиганием с управляемым вектором тяги при неработающих газогенераторе 1, турбонасосном агрегате 2 и камерах 3 по команде от системы управления (на фиг. 1-10 не показана) от источника инертного газа 27 включением в работу по необходимости пуско-отсечного клапана 36 на одной или нескольких из четырех магистралей 35 инертный газ, например, гелий, поступает в полость патрубка 74 или 75 или 76 и далее по сквозным каналам 68, 69 и 70 в полость 71, 72 и 73 в зависимости от того, в какой из плоскостей стабилизации (первой плоскости стабилизации 29 или второй плоскости стабилизации 30) требуется создание управляющего усилия периферийных сопел 32, 33 и 34. Под действием избыточного давления инертного газа по сравнению с давлением окружающей среды кольцевые торцевые стенки 77, 78 и 79 перемещаются, преодолевая сопротивление пружин 65, 66 и 67, посадочные кольцевые места 86, 87 и 88, взаимодействующие с посадочными местами 89, 90 и 91 выходят из контакта и образуют кольцевые щели 50, 51 и 52, являющиеся входом в минимальное сечение сопел внешнего расширения (в кольцевой зазор 37), при истечении инертного газа через которые создается сила тяги на спрофилированных внешних частях 44, 45 и 46 внутренних сопел 12, 13 14 (выполненных и спрофилированы в виде центральных тел 47, 48 и 49). Мембранный клапан 17 и пуско-отсечные клапаны 24, 25 и 26 блоков управления 16 находятся в закрытом положении. Таким образом, до запуска газогенератора 1, турбонасосного агрегата 2 и камер 3 и далее многокамерный жидкостный ракетный двигатель с управляемым вектором тяги обеспечен управлением вектором тяги на нестационарном режиме запуска. При запуске и далее на стационарном режиме работы генераторный газ от затурбинной полости турбонасосного агрегата 7 через вскрытый давлением генераторного газа мембранный клапан 17 по магистрали 18 поступает по команде системы управления (на фиг. 1-10 не показана) в необходимый для управления блок управления 16 и далее на вход 21, 22 и 23 пуско-отсечного клапана 24, 25 и 26, открытие или закрытие, которых обеспечивает подачу или прекращение подачи генераторного газа в сопла 12, 13 и 14. Периферийные сопла 32, 33 и 34 с закрытыми пуско-отсечными клапанами 36 прекращают свою работу. Работа сопел 12, 13 и 14 обеспечивает управляемость вектором тяги на стационарном, так называемом, маршевом режиме работы многокамерного жидкостного ракетного двигателя с дожиганием с управляемым вектором тяги. При выключенном газогенераторе 1, турбонасосном агрегате 2 и камерах 3 источник инертного газа 27, периферийные сопла 33 и пуско-отсечные клапаны 36 снова включаются в работу для корректировки положения или перевода на орбиту утилизации ступени при отделении отработавшего многокамерного жидкостного ракетного двигателя с управляемым вектором тяги в составе отработавшей ступени ракеты.
В предлагаемом многокамерном жидкостном ракетном двигателе с дожиганием с управляемым вектором тяги повышается точность обеспечения управляющего усилия с помощью сопел управления, повышения экономичности системы управления и в целом экономичности многокамерного жидкостного ракетного двигателя с дожиганием с управляющим вектором тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2709243C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2703076C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2707015C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2024 |
|
RU2836284C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ | 2022 |
|
RU2786605C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ | 2022 |
|
RU2784462C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2020 |
|
RU2739660C1 |
| ДВУХКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2016 |
|
RU2626618C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ НА КРИОГЕННОМ ТОПЛИВЕ | 2021 |
|
RU2773694C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ И БЛОК СОПЕЛ КРЕНА | 2010 |
|
RU2431756C1 |
Изобретение относится к ракетной технике, а более конкретно, к устройству многокамерного жидкостного ракетного двигателя с дожиганием с управляемым вектором тяги. Многокамерный жидкостной ракетный двигатель с дожиганием генераторного газа с управляемым вектором тяги, содержащий газогенератор, турбонасосный агрегат, несколько неподвижно относительно рамы камер, расположенных в плоскостях стабилизации, соединенных газоводами с затурбинной полостью турбонасосного агрегата, источник инертного газа в виде баллона и сопла управления, соединенные с затурбинной полостью турбонасосного агрегата входами магистралей с установленными на них пуско-отсечными клапанами, согласно изобретению блоки сопел управления выполнены в виде пар коаксиально установленных сопел, причем те из них, которые соединены с затурбинной полостью турбонасосного агрегата, расположены в центральных частях, а периферийные сопла соединены с источником инертного газа с помощью магистралей с установленными на них пуско-отсечными клапанами. Изобретение обеспечивает повышение точности управляющего усилия с помощью сопел управления за счет обеспечения управления перед запуском и на запуске, повышения экономичности управления, а также после выключения многокамерного жидкостного ракетного двигателя с дожиганием с управляющим вектором тяги. 2 з.п. ф-лы, 10 ил.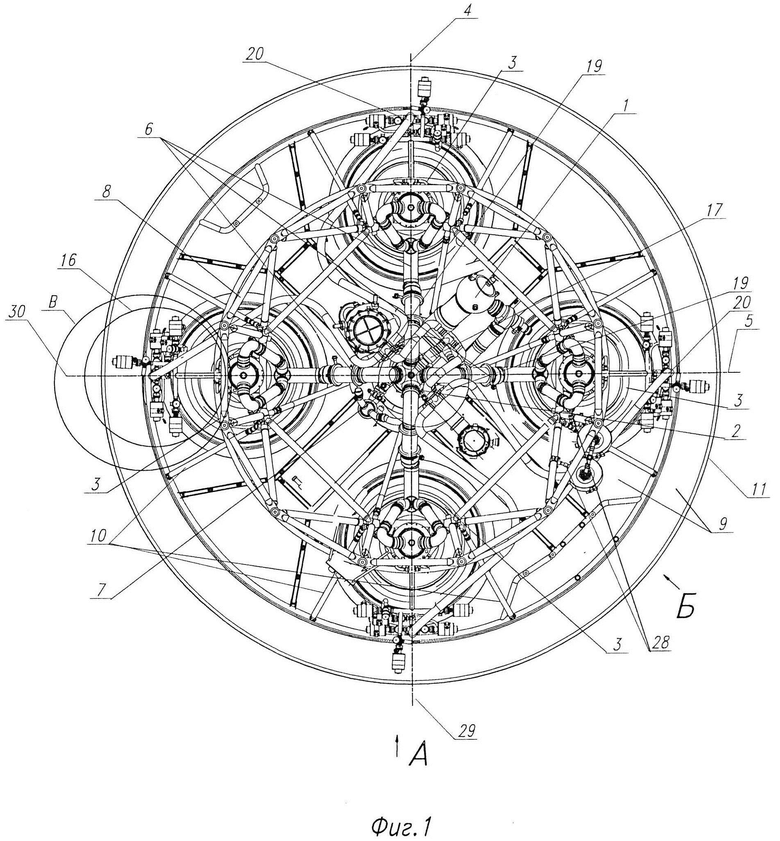
1. Многокамерный жидкостный ракетный двигатель с дожиганием с управляемым вектором тяги, содержащий газогенератор, турбонасосный агрегат, источник инертного газа, например гелия, несколько камер и блоков сопел управления, расположенных в плоскостях стабилизации, соединенных трубопроводами с затурбинной полостью турбонасосного агрегата, причем блоки сопел управления - посредством трубопроводов с пуско-отсечными клапанами, отличающийся тем, что в нем блоки сопел управления выполнены в виде пар коаксиально установленных сопел, причем те из них, которые соединены с затурбинной полостью турбонасосного агрегата, расположены в центральных частях, а периферийные сопла соединены с источником газа с помощью магистралей с установленными на них пуско-отсечными клапанами.
2. Многокамерный жидкостный ракетный двигатель с дожиганием с управляемым вектором тяги по п. 1, отличающийся тем, что периферийные сопла блока управления выполнены с возможностью перемещения с помощью приводов относительно внутреннего с обеспечением регулирования коаксиального зазора между соплами.
3. Многокамерный жидкостный ракетный двигатель с дожиганием с управляемым вектором тяги по п. 2, отличающийся тем, что периферийные сопла блока управления выполнены в виде сопел внешнего расширения, причем наружные части сопел внешнего расширения выполнены в виде кольцевых обечаек, установленных с возможностью перемещения относительно центральных сопел, а внешние части сопел внутренних сопел выполнены и спрофилированы в виде центральных тел, образующих кольцевые щели с кольцевыми обечайками.
| ЖИДКОСТНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА | 2014 |
|
RU2563596C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ ПО СХЕМЕ С ДОЖИГАНИЕМ ГЕНЕРАТОРНОГО ГАЗА | 2012 |
|
RU2520771C1 |
| US 3532304 A, 06.10.1970 | |||
| WO 2000058619 A1, 05.10.2000. | |||

