Техническое решение относится к моделям и макетам для обучения и проверки квалификация операторов промышленных процессов, в частности, таких как бурение с помощью гидравлических геологоразведочных станков.
Принимая во внимание высокую стоимость горного и геологоразведочного оборудования и ценность эффективной и рентабельной его работы, а также потребность максимально сократить травмоопасность и аварийность, связанную с недостаточной квалификацией операторов, важно обеспечить надлежащее обучение оператора до того, как он получает доступ к реальному оборудованию.
Уровень техники включает различные решения в области создания макетов и моделей для обучения операторов. Как правило, такие решения характеризуются отработкой теоретических знаний о протекающих процессах и правил эксплуатации, инспектирования оборудования и реагирования на возникающие проблемные ситуации, но не дают возможность физически отработать необходимые тактильные навыки и создать необходимые психомоторные навыки управления оборудованием. В частности, подобные решения раскрыты в следующих документах: патент РФ на изобретение №2503065 «РАСПРЕДЕЛЕННАЯ СИСТЕМА ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ БУРЕНИЯ», МПК G09B 9/00, G09B 19/24, G09B 25/02, опубликован 27.12.2013; патент Китая № CN101852076 «Underground working condition simulation method for controlled pressure drilling experiment and test», МПК E21B21/08, E21B44/00, E21B47/00, опубликован 06.10.2010; заявка на патент на изобретение США № US2013101968 «HEAVY EQUIPMENT SIMULATOR AND RELATED METHODS», МПК G09B5/02, опубликован 25.04.2013. Известные компьютерные модели не содержат физических элементов, имитирующих, например, пульт управления оборудованием, которые позволяли бы отработать необходимые психомоторные навыки.
Из уровня техники известны также решения, включающие различные манипуляторы и регуляторы, позволяющие тренировать тактильные навыки управления оборудованием. Такие решения включают стенды ученика, манипуляторы на которых соединены с реальным оборудованием, снабженным датчиками, позволяющими получать информацию о фактическом положении и состоянии отдельных частей или узлов оборудования. Таким образом можно сформировать виртуальную модель, отображающую результат действий ученика за пультом. В частности, подобные решения раскрыты в следующих документах: патент США на изобретение № US8139108B2 «Simulation system implementing real-time machine data», МПК H04N7/00, опубликован 31.07.2008; патент США на изобретение № US9129233B2 «System and method for training a machine operator», МПК G06Q10/00, G06Q10/06, G06Q10/10, опубликован 08.09.2015. Подобные решения позволяют хорошо отработать необходимые психомоторные навыки управления оборудованием, но их реализация связана с большими материальными затратами, в связи с необходимостью использования реального оборудования, дополнительно снабженного датчиками. Такие тренажеры требуют, кроме того, больших площадей и характеризуются недостаточной гибкостью, так как подходят для тренировки управления только имеющимся оборудованием.
При создании технического решения стояла задача создания тренажера-имитатора, который позволял бы раскрыть обучаемым особенности поведения оборудования и его реакции на действия оператора, в частности, механизмы взаимодействия породоразрушающего инструмента и бурового раствора со скважиной; увидеть визуальную модель процессов, происходящих в скважине и скрытых от прямого наблюдения, наблюдать возникновение и развитие осложнений и аварийных ситуаций.
Технический результат заключается в повышении эффективности процесса обучения. Наличие в тренажере-имитаторе физического пульта управления бурового станка, идентичного настоящему, позволяет погрузить учеников в обстановку реальной буровой и создать у них необходимые психомоторные навыки управления бурением, довести технологию «до кончиков пальцев». Тренажер, в частности, позволяет выполнить успешное обучение бурению скважин в безопасной и контролируемой обстановке. Обучение ответственным и дорогостоящим операциям можно выполнять до того, как обучаемый столкнется с ними на практике, что способствует сохранению человеческих жизней, оборудования и скважины от возможных последствий ошибок на буровой.
Решение поставленной задачи и заявленный технический результат достигаются тем, что тренажер-имитатор бурового станка, включающий стенд ученика, который содержит панели, имитирующие пусковую панель двигателя и манометры бурового станка, краны, имитирующие управление подачей и сбросом бурового раствора, рычаги и регуляторы, имитирующие элементы управления двигателем и буровым станком, пульт инструктора, который содержит модуль ввода данных для задания инструкций и модуль контроля действий ученика, дисплей, выполненный с возможностью визуального отображения процесса бурения и движения элементов бурового станка, и систему управления, включающую взаимодействующие между собой оперативную память, служащую для хранения текущих параметров оборудования, полученных от стенда ученика, и инструкций с пульта инструктора, блок обработки данных и блок управления анимацией, функционально соединенный с дисплеем для отображения анимации, согласно заявляемому решению содержит контроллер, взаимодействующий с системой управления, при этом краны, имитирующие управление подачей и сбросом бурового раствора, снабжены датчиками включения-выключения, рычаги, имитирующие элементы управления двигателем и буровым станком, снабжены датчиками положения, регуляторы, имитирующие элементы управления двигателем и буровым станком, снабжены датчиками углового положения, которые могут быть выполнены многооборотными, все датчики функционально соединены с контроллером для передачи данных. Рычаги, имитирующие элементы управления двигателем и буровым станком, могут быть выполнены двух- и трехпозиционными. Модуль ввода данных для задания инструкций выполнен с возможностью задания параметров бурения и режимов работы оборудования, а блок обработки данных выполнен с возможностью выполнения действий, включающих, но не ограничивающихся сопоставление инструкций, вычисление параметров для индикаторов, генерацию случайных чисел для имитации неравномерно протекающих реальных процессов и показаний, вычисление скорости бурения, положения вращателя и частоты вращения.
Стенд ученика по своему внешнему виду и расположению рычагов и регуляторов очень близко имитирует пульт прототипа бурового станка. Он содержит панели, имитирующие пусковую панель двигателя и манометры бурового станка. Пусковая панель двигателя управляет виртуальной моделью двигателя, включая индикаторы, входящие в нее. В частности, для дизельного двигателя на панели могут отражены следующие органы управления и индикации: тумблер (ключ) зажигания для запуска двигателя, тумблер (кнопка) обхода защиты, тумблер (кнопка) включения стартера, тумблер проверки работоспособности ламп аварийной индикации, тумблер предварительного прогрева двигателя, кнопка аварийной остановки двигателя, переключатель увеличения/снижения частоты вращения дизельного двигателя (наличие и вид зависит от модели станка), группа световых индикаторов, сигнализирующих об аварийных режимах двигателя. В случае, когда прототипом тренажера выступает буровой станок, оснащенный вместо дизельного двигателя электродвигателем, панель управления соответственно видоизменяется. Панель манометров бурового станка отображает виртуальную модель реального бурового станка, включая индикаторы, входящие в нее. В частности, для гидравлического бурового станка на панели могут быть отражены следующие органы управления и индикации: манометры бурового станка и показания, такие как: частота вращения шпинделя, осевая нагрузка, давление и уставка расхода промывочной жидкости, механическая скорость бурения, глубина скважины, и т.д. В режиме экзамена часть показаний может быть скрыта, для контроля достаточности отработки навыков. Стенд ученика также содержит краны, имитирующие управление системой подачи и сброса бурового раствора, снабженные датчиками включения-выключения, многопозиционные рычаги и регуляторы, имитирующие элементы управления двигателем и буровым станком, снабженные индукционными и многооборотными угловыми датчиками положения. Рычаги могут быть выполнены двух- и трехпозиционными, с целью точной имитации элементов управления реального двигателя и бурового станка. Все данные, поступающие с датчиков подаются на входы контроллера, взаимодействующего с системой управления, для создания виртуальной модели работы бурового станка и, в частности, для отражения этой виртуальной модели на дисплее. Дисплей, как правило, выполняют большого размера или, используют проектор, для того, чтобы максимально приблизить обстановку на тренажере к реальной обстановке на буровой.
Для контроля действий ученика и создания виртуальной модели поведения бурового станка в процессе обучения и экзамена, все рычаги и регуляторы снабжены датчиками, позволяющими определять текущее положение каждого элемента управления, собирать данные с них и посредством контроллера передавать в блок обработки данных для работы программы, формирующей в режиме реального времени виртуальную модель бурового станка. Контроль положения двух- и трехпозиционных рычагов может, например, производиться с помощью индуктивных бесконтактных датчиков, обеспечивающих надежное считывание и отсутствие недостатков, характерных для механических выключателей и кнопок, таких как ограниченный ресурс, ненадежность и «дребезг». Плавное регулирование параметров некоторых узлов бурового станка возможно, в частности, с использованием гидравлических многооборотных регуляторов (дросселей). Считывание данных об их положении, то есть, об углах поворота регуляторов, может быть, осуществлено передачей вращения как с помощью зубчатой или ременной передачи на энкодер и дальнейшей обработкой поступающих с него импульсов с помощью квадратурного счетчика с передачей на контроллер, так и с помощью абсолютного магнитного датчики угла поворота с полым валом, установленного на валу или рукоятке регулятора, с дальнейшей обработкой контроллером, учёт количества оборотов в этом случае производится с помощью контроля перепада выходного сигнала датчика при переходе через 0°.
Пульт инструктора служит для задания параметров бурения и режимов работы оборудования, а также контроля действий ученика. Пульт содержит модуль ввода данных, посредством которого инструктор может устанавливать условия работы бурового станка, например, строение геологического разреза скважины из нескольких видов пород по глубине залегания и категории буримости, типоразмер снаряда и степень поглощения промывочной жидкости, наличие осложнений в виде заполирования и подклина, а также позволяет создавать нештатные ситуации работы двигателя. Для контроля действий ученика и оценки степени и правильности отработки навыков служит модуль контроля.
Для управления работой всех узлов тренажера предназначена система управления, включающая взаимодействующие между собой оперативную память, например, в виде ОЗУ, служащую для хранения текущих параметров оборудования, полученных от контроллера стенда ученика, и инструкций с пульта инструктора, блок обработки данных, служащий для сопоставления инструкций, вычисления параметров для индикаторов, генераторы случайных чисел для имитации неравномерности показаний, вычисление скорости бурения, положения вращателя и частоты вращения и т.п., и блок управления анимацией, функционально соединенный с дисплеем для отображения анимации. Блок обработки данных, включает как минимум, процессор для исполнения программы создания виртуальной модели, которая рассчитывает режимы бурения в зависимости от состава горной породы и параметров, задаваемых оператором, определяет положение буровой колонны в каждую единицу времени, частоту вращения шпинделя, поведение грузовой и керновой лебедок, срабатывание трубодержателя и зажимного гидропатрона и т.д. На основании виртуальной модели, полученной в блоке обработки данных формируются визуальные модели, которые, например, имитируют поведение нежестких элементов станка (рукавов высокого давления и тросов) в соответствии с законами физики (земное притяжение, упругость и инерцию). Блок управления анимацией формирует сигналы дисплея для визуального отображения процесса бурения и движения элементов бурового станка.
Заявляемое решение поясняется далее с помощью фигур, которые на примере тренажера-имитатора бурового гидравлического станка с длинным ходом вращателя на базе дизельного двигателя демонстрирует один из вариантов осуществления технического решения.
Фиг. 1 представляет собой структурную схему тренажера-имитатора.
Фиг. 2 демонстрирует общий вид тренажера-имитатора.
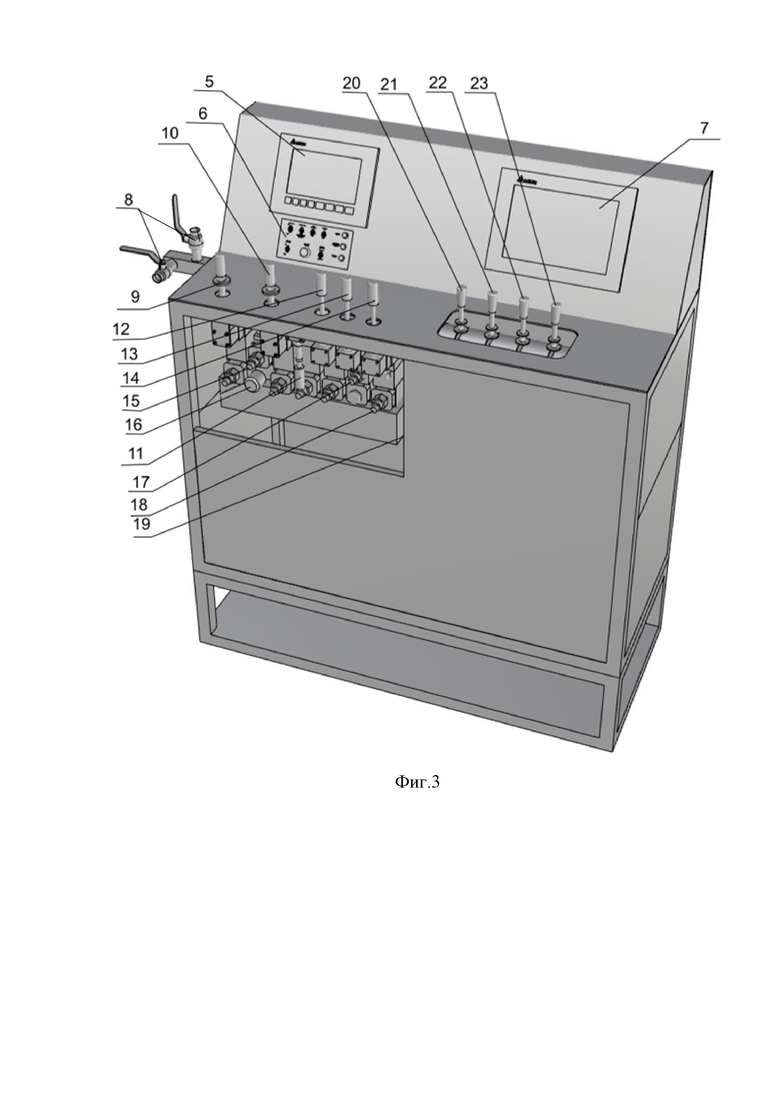
Фиг. 3 содержит общий вид стенда ученика.
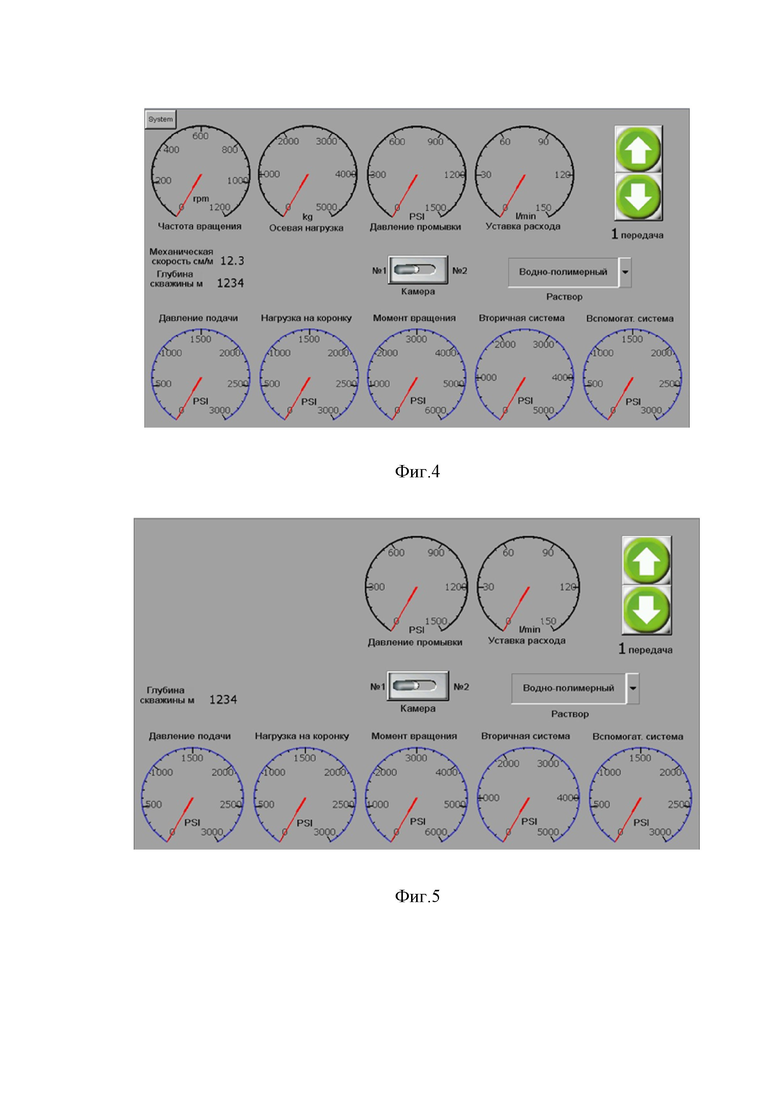
Фиг.4 демонстрирует интерфейс панели манометров бурового станка на стенде ученика в режиме обучения.
Фиг.5 демонстрирует интерфейс панели манометров бурового станка на стенде ученика в режиме экзамена.
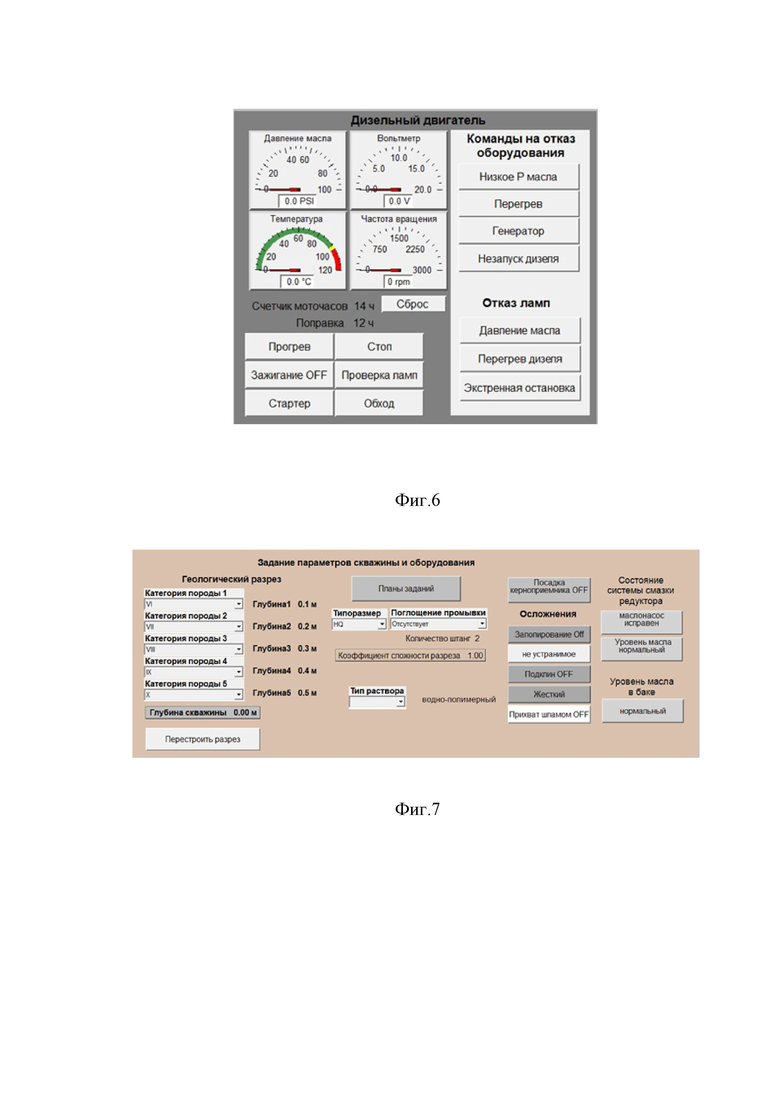
Фиг.6 демонстрирует интерфейс модуля ввода данных для задания инструкций в отношении двигателя.
Фиг.7 демонстрирует интерфейс модуля ввода данных для задания инструкций в отношении условий бурения.
Фиг.8 демонстрирует интерфейс модуля контроля.
Цифрами на фигурах обозначены: 1 – стенд ученика, 2 – пульт инструктора, 3 – дисплей, 4 – система управления, 5 – приборная панель двигателя, 6 – панель управления двигателем, 7 – панель манометров бурового станка, 8 - краны, имитирующие управление подачей и сбросом бурового раствора, 9 - двухпозиционный рычаг зажимного гидропатрона, 10 - двухпозиционный рычаг гидравлического штангодержателя, 11 - трехпозиционный рычаг управления мачтой, 12 - двухпозиционный рычаг миксера, 13 - трехпозиционный рычаг управления положениями плавающего вращателя, 14 - трехпозиционный рычаг медленной подачи, 15 - регулятор скорости вращения, 16 – рычаг растормаживания главной лебедки, 17 - регулятор скорости подачи, 18 - регулятор рабочего давления клапана медленной подачи, 19 - регулятор промывочного насоса, 20 - рычаг управления направлением вращения, 21 - рычаг быстрой подачи, 22 - рычаг управления главной лебедкой, 23 - рычаг управления керноприемной лебедкой, 24 – оперативное запоминающее устройство, 25 – блок обработки данных, 26 – блок управления анимацией.
Далее со ссылками на фигуры описано осуществление заявленного технического решения на примере тренажера-имитатора бурового гидравлического станка с длинным ходом вращателя на базе дизельного двигателя. Специалисту очевидно, что приведенные далее в примере названия и/или расположение и/или количество и/или форма элементов тренажера не являются ограничивающими объем заявленного технического решения. В описанном далее примере тренажера-имитатора могут отсутствовать второстепенные по значимости рычаги или регуляторы, например, предназначенные для спускоподъемных операций и настроечных действий, не относящиеся непосредственно к процессу бурения. При необходимости, возможна установка или удаление элементов, изменение расположения элементов в соответствии с конструкцией бурового станка и соответствующая доработка программного обеспечения блока обработки. Кроме того, некоторые технологические операции ввиду отсутствия возможности или необходимости их реализации в виде реальных объектов выполняются с помощью кнопок на стенде 1 ученика, например, рычаги коробки передач, выбор типа бурового раствора и т.п. Выбор таких параметров производится на одной из панелей стенда 1, при этом, как и на реальном буровом станке, изменение данных параметров доступно только при соблюдении требуемых условий, например, переключение передачи при выключенном вращении.
Стенд 1 ученика по своему внешнему виду и расположению рычагов и регуляторов очень близко имитирует пульт прототипа бурового станка. Как правило, стенд 1 включает верхнюю часть, на которой размещены приборная панель 5 двигателя, панель 6 манометров бурового станка и пусковая 7 панель двигателя. На горизонтальной поверхности и в нижней части стенда 1 размещены рычаги и регуляторы, их взаимное расположение зависит от модели бурового станка. Краны, имитирующие управление подачей и сбросом бурового раствора, могут быть подсоединены с боковой стороны или установлены на передней панели стенда 1.
Приборная панель 5 дизельного двигателя отображает все индикаторы, имеющиеся на данной панели у настоящего двигателя.
Панель 6 управления двигателем содержит органы управления и индикации, в частности, тумблер (ключ) зажигания для запуска двигателя, тумблер (кнопку) обхода защиты, тумблер (кнопку) включения стартера, тумблер проверки работоспособности ламп аварийной индикации, тумблер предварительного прогрева двигателя, кнопку аварийной остановки двигателя, переключатель увеличения/снижения частоты вращения дизельного двигателя, группу световых индикаторов, сигнализирующих об аварийных режимах двигателя и т.д.
Панель 7 отображает манометры бурового станка, и, при наличии в прототипе, индикатор частоты вращения шпинделя и расходомер.
Краны 8, имитирующие подключение к системе подачи и сброса бурового раствора, могут быть выполнены в виде шаровых кранов, функционально соответствующих вентилям подачи и сброса бурового раствора, оснащенных индуктивными датчиками включения и выключения.
Двухпозиционный рычаг 9 зажимного гидропатрона выполнен с фиксированными положениями и оснащен индуктивным датчиком положения. С помощью него управляют зажимным гидропатроном, позволяющим передавать вращение и осевую нагрузку вращателя на буровой снаряд в закрытом состоянии. Чтобы открыть гидропатрон рычаг 9 перемещают вперед; чтобы закрыть гидропатрон –назад. Рычаг 9 снабжен механическим запорным устройством, предотвращающим случайное включение.
Двухпозиционный рычаг 10 гидравлического штангодержателя, с фиксированными положениями служит для управления зажимным устройством штангодержателя. Он оснащен индуктивным датчиком положения. Чтобы закрыть штангодержатель, рычаг 10 передвигают вперед, чтобы открыть штангодержатель – назад. Рычаг 10 снабжен механическим запорным устройством, предотвращающим случайное включение;
Трехпозиционный рычаг 11 с нефиксированными положениями служит для управления скоростью и направлением движения мачты посредством двух гидравлических цилиндров. Он оснащен двумя индуктивными датчиками положения. Чтобы поднять мачту, необходимо передвинуть рычаг 11 вперед, чтобы опустить мачту – передвинуть назад.
Двухпозиционный рычаг 12 с фиксированными положениями для управления включением миксера с гидравлическим приводом. Оснащен индуктивным датчиком положения. Чтобы включить миксер, необходимо передвинуть рычаг 12 назад, чтобы выключить миксер –передвинуть вперед.
Трехпозиционный рычаг 13 управления положениями плавающего вращателя выполнен с фиксированными положениями. Оснащен двумя индуктивными датчиками положения. Перемещение рычага 13 вперед обеспечивает плавное движение вращателя вниз для свинчивания резьбы; перемещение рычага 13 назад обеспечивает плавное движение вращателя вверх для развинчивания резьбы, в нейтральном положении рычага 13 вращатель остается без движения.
Трехпозиционный рычаг 14 медленной подачи имеет фиксированные положения. Оснащен двумя индуктивными датчиками положения. Обеспечивает медленную подачу вращателя вниз или вверх в процессе бурения. При среднем положении рычага 14 гидросистема медленной подачи выключена, что позволяет пользоваться клапаном быстрой подачи. Перемещение рычага 14 вперед обеспечивает медленную подачу вниз (бурение). Перемещение рычага 14 назад обеспечивает медленную подачу вверх (выбуривание, срыв керна).
Регулятор 15 скорости вращения оснащен датчиком углового положения. Вращение данного регулятора 15 позволяет изменить настройку минимального рабочего объема мотора вращателя и, следовательно, изменять скорость вращения и крутящий момент вращателя. При повороте регулятора 15 по часовой стрелке скорость вращения возрастает до максимума, при повороте регулятора 15 против часовой стрелки скорость вращения снижается. Регулятор 15 позволяет выбрать оптимальную скорость вращения бурильной колонны в одном из четырех диапазонов коробки передач при переключении. Частота вращения зависит от положения регулятора 15, передаточного коэффициента коробки передач, частоты вращения коленвала дизельного двигателя и угла отклонения рычага включения вращения. Индикатор частоты вращения отображается на экране пульта 2 инструктора и, при его наличии в конкретной модели бурового станка, на панели 7 манометров бурового станка стенда 1 ученика (фиг.4). Если в прототипе тахометр отсутствует, то в режиме «Экзамен» он скрыт от ученика, как показано на фиг.5
Рычаг 16 растормаживания главной лебедки с фиксированными положениями оснащен индуктивным датчиком положения. Рычаг 16 контролирует поток масла для растормаживания тормоза главной лебедки. Поворот рычага 16 клапана по часовой стрелке задействует тормоз лебедки для работы лебедки в обычном режиме СПО. Поворот рычага 16 клапана против часовой стрелки растормаживает лебедку в режиме бурения.
Регулятор 17 скорости подачи оснащен датчиком углового положения. Регулятором 17 задается скорость подачи бурильной колонны. При повороте регулятора 17 по часовой стрелке скорость углубки снижается, против часовой – увеличивается. Давление в нижней полости гидроцилиндра, создаваемое совокупностью веса снаряда, осевой нагрузки, уходки, давления в верхней (нагнетательной) полости и пропускной способности дросселя рассчитывается в блоке 25 обработки данных и отображается на панелях 5 и 7 стенда 1 ученика и в модуле контроля пульта 2 инструктора.
Регулятор 18 рабочего давления клапана медленной подачи оснащен датчиком углового положения и позволяет установить оптимальное гидравлическое давление в полости нагнетания гидроцилиндра (то есть желаемую чувствительность) для работы регулятора скорости подачи в соответствии с весом бурильной колонны и давлением на коронку. Давление отображается на панели 7 стенда 1 ученика и в модуле контроля пульта 2 инструктора.
Регулятор 19 промывочного насоса оснащен датчиком углового положения и расположен непосредственно под вспомогательным коллектором на передней панели стенда 1 ученика. Поворотом регулятора 19 против часовой стрелки включается, а также повышается скорость вращения гидромотора привода промывочного насоса. При повороте регулятора 19 по часовой стрелке до упора промывочный насос прекратит работу.
Рычаг 20, оснащенный датчиком углового положения, управляет правым или левым вращением зажимного патрона. Рычаг 20 снабжен механическим стопором, предотвращающим случайное включение, а также резкую смену направления вращения.
Рычаг 21 быстрой подачи оснащен датчиком углового положения. Управляет ходом вращателя вверх и вниз со скоростью, пропорциональной углу отклонения. Во время бурения с медленной подачей не используется (т.е. остается в нейтральном положении). Перевод рычага 21 в верхнее положение поднимает вращатель, перевод рычага 21 в нижнее положение опускает его. Нейтральное положение этого не фиксируемого рычага 21 устанавливается при помощи пружины.
Рычаг 22 управления главной лебедкой оснащен датчиком углового положения. При переводе данного рычага 22 вверх трос будет наматываться на барабан главной лебедки (поднимая колонну бурильных труб), а при его переводе вниз трос будет, соответственно, разматываться с барабана главной лебедки (опуская колонну бурильных труб) со скоростью, пропорциональной углу отклонения. Нейтральное положение этого не фиксируемого рычага 22 устанавливается при помощи пружины.
Рычаг 23 управления керноприемной лебедкой оснащен датчиком углового положения. При переводе данного рычага 23 вверх со скоростью, пропорциональной углу отклонения, трос будет наматываться на барабан керноприемной лебедки, поднимая зацеп керноприемной трубы, а при его переводе вниз трос будет, соответственно, разматываться с барабана керноприемной лебедки, опуская зацеп керноприемной трубы. Рычаг 23 снабжен механическим стопором для предотвращения случайного включения.
Оперативное запоминающее устройство 24 выполняет функции оперативной памяти системы 4 управления, то есть служит для хранения выполняемого машинного кода (программы), а также входных, выходных и промежуточных данных, обрабатываемых процессором во время работы системы управления, таких как, текущие параметров оборудования, полученные от контроллера стенда 1 ученика, инструкции с пульта 2 инструктора, блока 25 обработки данных и т.д.
Блок 25 обработки данных служит для сопоставления инструкций, вычисления параметров для индикаторов, генерирования случайных чисел для имитации неравномерности показаний, вычисление скорости бурения, положения вращателя и частоты вращения и т.п. Блок обработки данных, включает, как минимум, процессор для исполнения программ создания виртуальной модели. Алгоритмы, заложенные в программы, описывают закономерность поведения виртуальных исполнительных механизмов и параметров, отображаемых на индикаторных приборах, в зависимости от заданных инструктором условий бурения и текущего положения органов управления стенда 1, которые передаются к блоку обработки данных посредством контроллера, на входы которого поступают все данные с датчиков, подключенных к рычагам и регуляторам.
Блок 26 управления анимацией является элементом системы управления и функционально соединен с дисплеем 3 для отображения анимации.
Использование заявленного тренажера-имитатора описано далее.
На панели 6 управления двигателем производят включение зажигания путем перевода ключа в положение «зажигание», индикаторы на панели – 5 при этом показывают текущее состояние: напряжение аккумуляторов 12 (24) В (в зависимости от модели), частоту вращения коленвала – 0 об/мин, температуру двигателя (если до этого двигатель был прогрет, то температура будет показана в соответствии с обычной скоростью остывания, ориентировочно 20 мин со 100 ᵒC до 0 ᵒC), и загораются сигнальные лампы низкого давления масла и аварийного отключения. При включении кнопки стартера возникает просадка напряжения аккумулятора до 9 (16) В, затем через 2 сек летом (5 сек – зимой) запускается двигатель. После запуска давление масла поднимается до 3 bar (в течение 2 сек летом, - 40 сек зимой). В холодное время для того, чтобы двигатель не отключился из-за низкого давления масла (менее 1 bar), нужно нажать кнопку обхода защиты. После запуска частота вращения коленвала составляет 800 об/мин., напряжение генератора – 14 (28) В. Давление масла в течение 5 – 20 сек поднимется до 3 bar. Частоту вращения коленвала можно увеличить/снизить переключением тумблера или рычагом управления дроссельной заслонки (в зависимости от модели станка). При увеличении частоты вращения выше 2600 об/мин двигатель автоматически отключается (в зависимости от модели станка). При выборе режима «зима» в системе задается начальная температура двигателя – 40 ᵒC и в течение 20 мин после запуска температура поднимается до 80 ᵒC. В «летнем» режиме температура растет с 0 ᵒC. На панели 5 двигателя стенда 1 индикация сезона может отображаться строкой внизу экрана. Для запуска холодного двигателя (режим «зима») необходимо предварительно прогреть воздух во впускном коллекторе (30 сек). Работа дизельного двигателя (включение стартера, работа в заведенном состоянии) сопровождается звуками, соответствующими реальным. При изменении частоты вращения коленвала двигателя меняется звук двигателя. Информация о запуске двигателя поступает также на блок 25 обработки данных, который после её обработки формирует команду к блоку 26 управления анимации и на дисплее 3 отображается повышенное содержание выброса сажи и копоти из выхлопной трубы во время запуска и при повышенных нагрузках. Данные о частоте вращения коленвала передаются в блок 25 обработки данных, откуда поступают на остальные элементы тренажера.
С помощью пульта 2 инструктора возможно создавать нештатные ситуации работы двигателя (фиг.6), например, низкое давление масла - снижает показания давления масла манометров на панели 5 стенда 1, по истечении 30 сек двигатель глохнет, перегрев - при его включении показания температуры двигателя плавно увеличиваются, и после достижения температуры 105 ˚С двигатель останавливается, команда на отказ работы генератора, при ее включении вольтметр показывает снижение напряжения на клеммах аккумулятора, незапуск дизеля – двигатель не заведется, пока нажата данная кнопка, отказ ламп - отключают сигнальные лампы на стенде 1 ученика.
После запуска, прогрева и выхода на рабочие обороты коленвала дизельного двигателя буровой станок готов к работе. Режимные параметры манометров буровой установки отображаются на панели 7 стенда 1 ученика (фиг.4, 5). Панель 7 в нижнем ряду имитирует манометры бурового станка, в верхнем ряду – рассчитываемые показания частоты вращения шпинделя, осевую нагрузку, давление и уставку расхода промывочной жидкости. В правом верхнем углу находится системная кнопка «System» для настройки панели. В среднем ряду отображаются механическая скорость бурения, глубина скважины, кнопки «Наращивание штанги», камеры (для выбора вида станка на анимации), рычаги переключения коробки передач. Во время проведения экзаменов могут скрываться часть индикаторов, в зависимости от конструкции реального станка, например, частоты вращения шпинделя, осевой нагрузки, уставки промывки, механической скорости и глубины скважины. При нажатии кнопки «Наращивание» длина колонны увеличивается на 3 м. Процедуры спускоподъемных операций, таких как отвинчивание, свинчивание снаряда, подъем и опускание керноприемной трубы в функционале тренажера могут отсутствовать, ввиду простоты обучения им персонала на практике. Кнопки, функционально соответствующие рычагам коробки передач, активны (реагируют на нажатие) только при отсутствии вращения шпинделя и положении вращателя на высоте не более 2-х м.
С помощью модуля ввода данных для задания инструкций пульта 2 инструктора, могут быть заданы различные параметры бурения, например, строение геологического разреза скважины из пяти видов пород по глубине залегания и категории буримости, типоразмер снаряда и степень поглощения промывочной жидкости (фиг.7). Если при задании глубин залегания пород была внесена ошибка, при которой глубина предыдущей породы оказалась больше последующей, то появится сообщение об ошибке. Начальная глубина задается строкой «Глубина скважины», при этом автоматически рассчитывается количество буровых штанг в колонне и вес буровой колонны, что отображается в строке «Количество штанг» и на индикаторе нагрузка на коронку. Категория интервала от начальной глубины до глубины2 соответствует категории породы 1. «Коэффициент сложности разреза» учитывает характер стенок скважины (для нормального разреза - 1, в сложных геологических условиях - 1,5-2). Оказывает влияние на мощность, потребляемую на вращение бурового става и бурение. В окне «тип раствора» появляется выпадающий список из 4-х вариантов, выбранный тип отображается рядом (например, глинисто-полимерный + смазка). Кнопка «Посадка керноприемника» запускает имитацию посадки керноприемной трубы в колонковую последовательностью изменения показаний манометра давления бурового раствора. Ученику необходимо их отслеживать и вовремя сбросить давление, открыв кран на слив. Кнопки блока «Осложнения» позволяют запускать имитацию заполирования и подклина и их вариантов – устранимое – не устранимое заполирование и мягкого или жесткого подклина. Устранимое заполирование ликвидируется определенными действиями ученика. Кнопка «Подклин» при выборе типа кнопкой «Жесткий» вызывает возрастание давления промывочной жидкости до 60 атм. Ученик должен оторвать снаряд от забоя, не выключая вращение, при этом давление на насосе падает до уровня ниже рабочего процентов на 10, покрутить снаряд секунд 10 и повторить попытку продолжить бурение. При повторе ситуации «мертвый» подклин необходимо прекратить бурение. При выборе «Мягкого подклина» в течение нескольких секунд возникает плавный подъем давления от единиц до пары десятков атмосфер выше рабочего давления. Для ликвидации «мягкого» подклина необходимо увеличить нагрузку на забой не менее чем на 300 кг, но не более допустимой нагрузки, и если в течении 2 минут подклин не устраняется, то осуществить подъем керноприемной трубы. Кнопка «Прихват шламом» в сочетании с бурением в мягких породах запускает имитацию данного режима. Выходом из такой ситуации является сброс давления промывки сливным краном. Все реакции ученика на возникновение осложнений обрабатываются программой в соответствии с алгоритмами поведения буровика в ситуациях, аналогичных происходящим в реальности.
Модуль контроля пульта 2 инструктора, позволяет отображать параметры оборудования, изменяющиеся в результате действий ученика (фиг. 8). В верхней строке окна расположены индикаторы, дублирующие манометры стенда 1 ученика. В нижней строке отображаются параметры, которые рассчитываются блоком 25 обработки данных, исходя из положений рычагов и регуляторов, задаваемых учеником, а также давление промывочной жидкости, выбранная скорость коробки передач и кнопки управления камерами 3D модели. Кнопкой 3D модели «Общий вид» можно выбрать основное изображение на экране второго монитора: общий вид станка или вид с позиции оператора буровой установки. Кнопки 3D модели «Разрез», «Вид на скважину» и «Вид на слайдер» включают окна в углах дисплея 3, показывающие видео разреза скважины, устья и линейки на направляющей, по которой перемещается слайдер, что позволяет ученику оценить скорость бурения.
Блок 25 обработки данных выполняет программу виртуальной модели, которая рассчитывает режимы бурения в зависимости от заданных инструктором состава горной породы и параметров, задаваемых учеником, определяет положение буровой колонны в каждую единицу времени, частоту вращения шпинделя, поведение грузовой и керновой лебедок, срабатывание трубодержателя и зажимного гидропатрона. При включении тренажера исходное положение установки – дизельный двигатель выключен, мачта опущена, вращатель находится в нижней точке, гидропатрон зажат.
После включения, прогрева и выхода модели дизельного двигателя на рабочие режимы модель бурового станка готова к работе.
Трехпозиционный рычаг 11 управления подъемом и опусканием мачты, оснащенным двумя датчиками положения, задает направление подъема (опускания) мачты бурового станка. Сигналы с датчиков рычага 11 поступают на вход контроллера стенда 1, который передает данные в блок 25 обработки данных, для обработки программой, которая управляет положением мачты станка в виртуальной модели. Для начала работы мачту устанавливают в вертикальное положение включением рычага 11 в положение «Вверх».
Для перемещения снаряда грузовой лебедкой необходимо предварительно раскрепить гидропатрон рычагом 9. При начале работы свободная длина троса равна нулю, поэтому снаряд должен неподвижно висеть на тросе грузовой лебедки. Во избежание опускания снаряда под собственным весом в выключенном положении рычага 22 главной (грузовой) лебедки необходимо установить рычаг 16 управления тормозом лебедки в положение «зафиксирован». В случае, когда тормоз лебедки не заторможен, изображение бурильной трубы своим нижним концом опустится вниз до забоя, либо, в случае, если вращатель находится в верхнем положении, и расстояние от верхнего конца снаряда, оснащенного сальником окажется меньше расстояния от нижнего конца трубы до забоя, снаряд остановится за счет сальника на гидропатроне. Программа, выполняемая блоком 25 обработки данных, учитывает сигналы от датчиков и при раскрепе рычагом 9, рассчитывает длину снаряда, взаимное расположение элементов на мачте, формирует сигналы для отображения на визуальной модели перемещение корпуса гидропатрона, соответствующее положению «Патрон раскреплен». При раскрепе изображение бурового снаряда опустится вниз, выбирая свободную длину троса, либо, при положении рычага 16 управления тормозом лебедки в положение «зафиксирован», останется в неподвижном положении. В результате в модели запишется положение бурового снаряда.
Перед началом бурения рычагом 9 раскрепляется патрон, рычагом 22 грузовой лебедки буровой снаряд устанавливается на забой, рычагом 21 быстрой подачи или рычагом 14 медленной подачи вращатель поднимается к верхнему положению, рычагом 9 зажимается гидропатрон, регулятором 19 включается и выставляется на необходимую производительность буровой насос, шаровый кран подачи бурового раствора переводится в положение «открыт», шаровый кран сброса бурового раствора – в положение «закрыт». Установка готова к бурению.
Информация с датчиков о положении элементов в результате вышеперечисленных действий ученика поступает на контроллер и с него в блок 25 обработки данных, где формируются изменения в состояние виртуальной модели станка, а управляющие команды из блока 25 поступают в блок 26 управления анимацией и приводят к изменению положения элементов в визуальной модели, отображаемой на дисплее 3.
Ученик, включив рычагом 14 подачу снаряда вниз и включив рычагом 20 вращение, приступает к процессу бурения. Осевая нагрузка определяется положением регулятора 17 скорости подачи, и, при необходимости, регулятором 18 рабочего давления. Частота вращения регулируется положением регулятора 15, с учетом передаточного коэффициента коробки передач, частоты вращения коленвала дизельного двигателя и угла отклонения рычага 20 направления вращения.
Виртуальная модель после достижения расчетного значения контакта породоразрушающего инструмента (алмазной коронки), находящегося на нижнем конце бурового снаряда, с забоем скважины подключает данные, сохраненные в оперативной памяти 24, касающиеся параметров бурения. При этом учитывается вся заданная инструктором в модуле задания параметров бурения информация о типе, составе горной породы, глубине скважины, сложности разреза и других данных, а также заданные оператором режимы бурового станка. Формула, описывающая процесс бурения рассчитывает на основании этих параметров поведение снаряда, скорость бурения, затраты мощности, давление промывочной жидкости, давления на манометрах станка и соответствующие им частоту вращения, осевую нагрузку, отображает их на соответствующих индикаторах и передает команды в блок 26 управления анимацией. Для придания большего реализма в формулу могут вводиться плавающие поправочные коэффициенты, изменяющие в небольших пределах параметры бурения, создающие эффект реакции на меняющиеся породу, ее буримость, гидравлическое сопротивление пристеночной полости скважины, через которую выносится шлам, влияющее на давление промывочной жидкости.
Визуальные модели для отображения на дисплее 3 формируются в блоке 26 управления анимацией на основании команд и данных, поступающих от блока 25 обработки данных, и имитируют поведение нежестких элементов станка (рукавов высокого давления и тросов) в соответствии с законами физики (земное притяжение, упругость и инерцию). В блоке 26 управления анимацией хранятся данные о визуальной 3D модели бурового станка. Команды, поступающие от блока 25 обработки данных, служат для моделирования поведения исполнительных механизмов, генерации параметров станка и данных бурения, управляют положением и скоростью перемещения узлов станка. Ракурс общего вида, наиболее удобный для наблюдения и работы, выбирается (настраивается) при помощи манипулятора типа «мышь» панели 2 инструктора. Дополнительные изображения в виде небольших экранов по углам предоставляют более полную информацию. В большинстве случаев на территории Российской Федерации в сложных и тяжелых климатических условиях станок, как правило, располагается внутри передвижного бурового помещения, но в целях удобства наблюдения в анимации станок отображается без него.
Заявленный тренажер-имитатор является эффективным техническим средством обучения и повышения квалификации буровиков. Позволяет приобрести и усовершенствовать практические навыки выполнения, контроля и оптимизации основных технологических процессов бурения скважин на полезные ископаемые, распознавания и предотвращения осложнений и аварийных ситуаций.
Следует отметить, что для реализации заявленного тренажера могут быть использованы множество аппаратных и программных средств и различных структурных компонентов. Приведенный пример реализации тренажера и его использования не ограничивает объем заявленного решения представленными частными формами исполнения отдельных компонентов или этапов. Специалисту в данной области техники очевидно, что, по меньшей мере, программные аспекты осуществления могут быть реализованы одним или несколькими процессорами. Различные компоненты тренажера, описанные в примере, могут включать в себя стандартные аппаратные и программные средства, такие как один или несколько процессоров, один или несколько постоянных машиночитаемых модулей носителя, один или несколько интерфейсов ввода / вывода и различные соединения (например, системная шина) для подключения компонентов. Следует понимать, что если указано, что компонент «соединён» с другим компонентом, это означает, что он может быть «напрямую соединён» с другим компонентом или «электрически соединён» с другим компонентом через третий компонент. Кроме того, если не указано обратное, слова «включать», «содержать» и их формы «включает», «содержит», «включающий», «содержащий» подразумевает наличие указанных компонентов, но не отсутствие любых других компонентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПРЕДЕЛЕННАЯ СИСТЕМА ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ БУРЕНИЯ | 2010 |
|
RU2503065C1 |
| Регулятор осевой нагрузки на буровой снаряд | 1980 |
|
SU874961A1 |
| Гидравлическая буровая установка | 2024 |
|
RU2832371C1 |
| Гидравлическая система бурового станка | 1983 |
|
SU1133374A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС УРБ ZBT-600 ДЛЯ ИНЖЕНЕРНО-ГЕОЛОГИЧЕСКИХ ИЗЫСКАНИЙ | 2015 |
|
RU2601350C1 |
| М. С. СЬвич, г.КГ.ЛДСТЕКАЛ. Д. Табачников, Н. И. Чугунов, Л. Г. Штрахман, М. Д. Щеглфви Н. Д. Якобсон | 1969 |
|
SU250811A1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ОРБИТАЛЬНОГО УЗЛОВОГО МОДУЛЯ РОССИЙСКОГО СЕГМЕНТА МЕЖДУНАРОДНОЙ КОСМИЧЕСКОЙ СТАНЦИИ | 2012 |
|
RU2506647C1 |
| Тренажер транспортного средства | 1981 |
|
SU1054829A1 |
| ПОРТАТИВНАЯ СИСТЕМА ИМИТАЦИИ БУРЕНИЯ | 2010 |
|
RU2517261C2 |
| ФУНКЦИОНАЛЬНО-МОДЕЛИРУЮЩИЙ СТЕНД ДЛЯ СОЗДАНИЯ УСЛОВИЙ ИНТЕРАКТИВНОГО БЕЗОПОРНОГО ПРОСТРАНСТВА И ПОНИЖЕННОЙ ГРАВИТАЦИИ | 2012 |
|
RU2518478C2 |

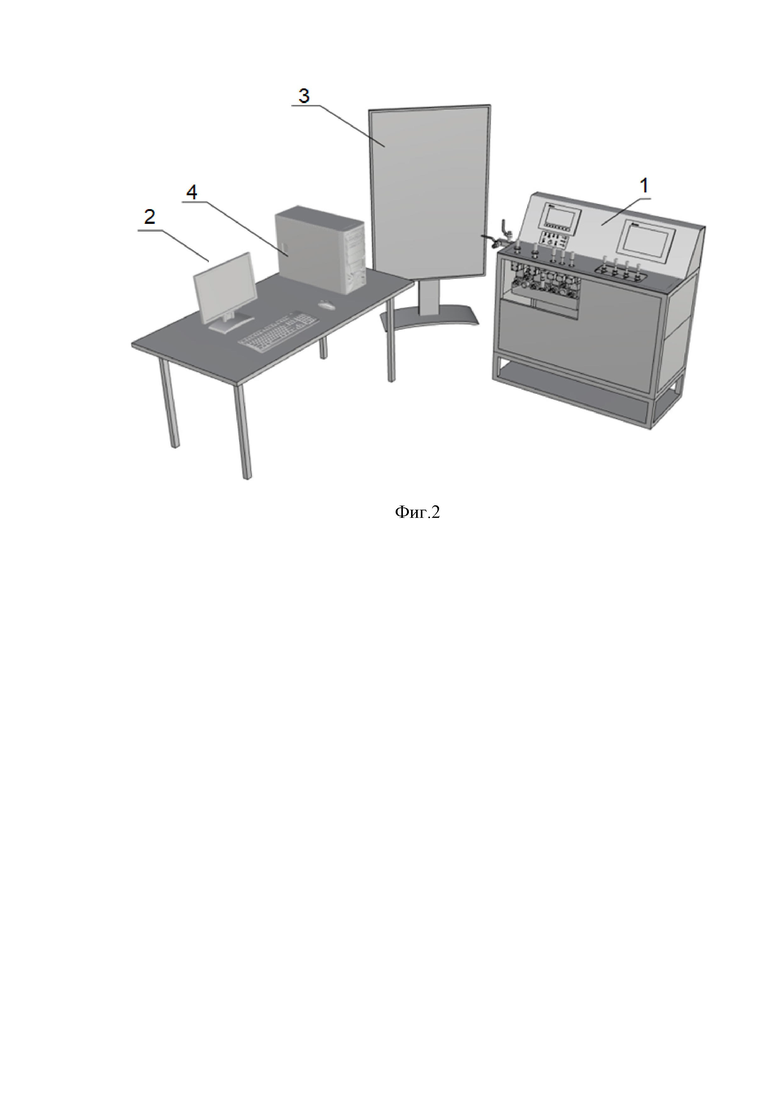

Изобретение относится к моделям и макетам для обучения и проверки квалификации операторов промышленных процессов, в частности, таких как бурение с помощью гидравлических геологоразведочных станков. Тренажер-имитатор бурового станка включает стенд ученика (1), который содержит панели, имитирующие пусковую панель двигателя и манометры бурового станка, краны, имитирующие управление подачей и сбросом бурового раствора, рычаги и регуляторы, имитирующие элементы управления двигателем и буровым станком, пульт инструктора (2), который содержит модуль ввода данных для задания инструкций и модуль контроля действий ученика, дисплей (3), выполненный с возможностью визуального отображения процесса бурения и движения элементов бурового станка, и систему управления (4), включающую взаимодействующие между собой оперативную память, служащую для хранения текущих параметров оборудования, полученных от стенда ученика, и инструкций с пульта инструктора. Блок обработки данных (25) и блок управления анимацией (26) функционально соединены с дисплеем для отображения анимации и содержат контроллер, взаимодействующий с системой управления. Краны, имитирующие управление подачей и сбросом бурового раствора, снабжены датчиками включения-выключения. Рычаги, имитирующие элементы управления двигателем и буровым станком, снабжены датчиками положения. Регуляторы, имитирующие элементы управления двигателем и буровым станком, снабжены датчиками углового положения, которые могут быть выполнены многооборотными. Все датчики функционально соединены с контроллером для передачи данных. Рычаги, имитирующие элементы управления двигателем и буровым станком, могут быть выполнены двух- и трехпозиционными. Модуль ввода данных для задания инструкций выполнен с возможностью задания параметров бурения и режимов работы оборудования. Блок обработки данных выполнен с возможностью выполнения действий, включающих, но не ограничивающихся сопоставление инструкций, вычисление параметров для индикаторов, генерацию случайных чисел для имитации неравномерно протекающих реальных процессов и показаний, вычисление скорости бурения, положения вращателя и частоты вращения. Обеспечивается повышение эффективности процесса обучения, наличие в тренажере-имитаторе физического пульта управления бурового станка, идентичного настоящему, позволяет погрузить учеников в обстановку реальной буровой, создание у них необходимых психомоторных навыков управления бурением, выполнение успешного обучения бурению скважин в безопасной и контролируемой обстановке. 4 з.п. ф-лы, 8 ил.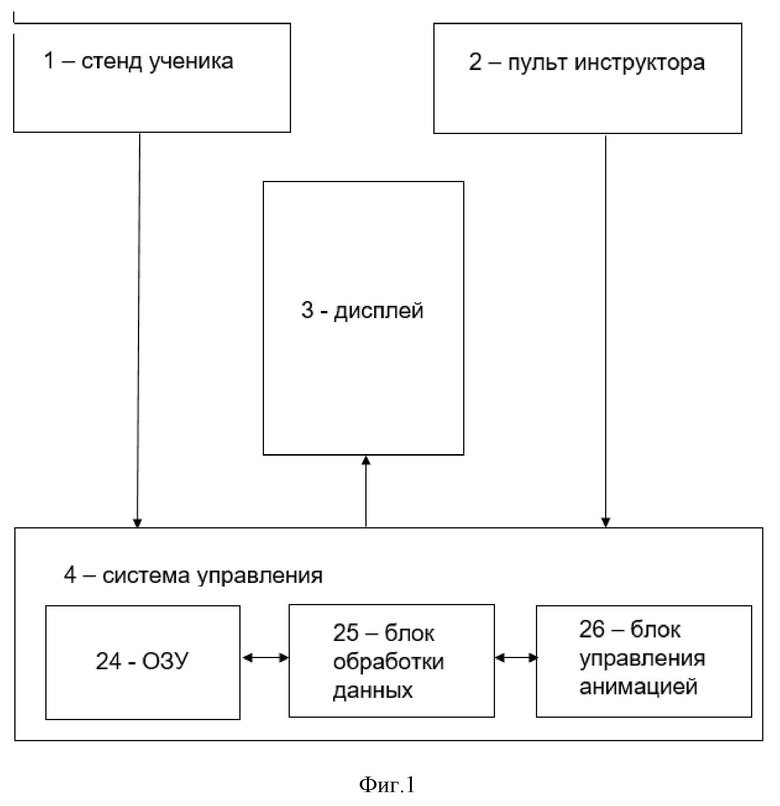
1. Тренажер-имитатор бурового станка, включающий стенд ученика, который содержит панели, имитирующие пусковую панель двигателя и манометры бурового станка, краны, имитирующие управление подачей и сбросом бурового раствора, рычаги и регуляторы, имитирующие элементы управления двигателем и буровым станком, пульт инструктора, который содержит модуль ввода данных для задания инструкций и модуль контроля действий ученика, дисплей, выполненный с возможностью визуального отображения процесса бурения и движения элементов бурового станка, и систему управления, включающую взаимодействующие между собой оперативную память, служащую для хранения текущих параметров оборудования, полученных от стенда ученика, и инструкций с пульта инструктора, блок обработки данных и блок управления анимацией, функционально соединенный с дисплеем для отображения анимации, отличающийся тем, что содержит контроллер, взаимодействующий с системой управления, краны, имитирующие управление подачей и сбросом бурового раствора, снабжены датчиками включения-выключения, рычаги, имитирующие элементы управления двигателем и буровым станком, снабжены датчиками положения, регуляторы, имитирующие элементы управления двигателем и буровым станком, снабжены датчиками углового положения, все датчики функционально соединены с контроллером для передачи данных.
2. Тренажер-имитатор бурового станка по п.1, отличающийся тем, что рычаги выполнены двух- и трехпозиционными.
3. Тренажер-имитатор бурового станка по п.1, отличающийся тем, что датчики углового положения регуляторов выполнены многооборотными.
4. Тренажер-имитатор бурового станка по п.1, отличающийся тем, что модуль ввода данных для задания инструкций выполнен с возможностью задания параметров бурения и режимов работы оборудования.
5. Тренажер-имитатор бурового станка по п.1, отличающийся тем, что блок обработки данных выполнен с возможностью выполнения действий, включающих, но не ограничивающихся сопоставление инструкций, вычисление параметров для индикаторов, генерацию случайных чисел для имитации неравномерно протекающих реальных процессов и показаний, вычисление скорости бурения, положения вращателя и частоты вращения.
| РАСПРЕДЕЛЕННАЯ СИСТЕМА ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ БУРЕНИЯ | 2010 |
|
RU2503065C1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Токарный резец | 1924 |
|
SU2016A1 |

