Предлагаемый способ относится к способам обнаружения, определения координат очагов пожара и выбора оптимального момента сброса огнегасящей жидкости с летательного аппарата.
Применение летательных аппаратов для тушения пожаров широко известно [1]. Эффективность пожаротушения в значительной мере зависит от выбора правильного момента сброса огнегасящей жидкости. Момент сброса жидкости должен выбирается исходя из координат очага пожара, высоты и скорости полета летательного аппарата.
Известен способ дистанционного обнаружения потенциальных очагов пожара или непосредственно пожара при использовании летательного аппарата, например, самолета (патент США US 5936245 (A) "Method and system for remote sensing of the flammability of the different parts of an area flown over by an aircraft", МПК A62C 3/02; опубл. 10. 08.1999). Обнаружение пожароопасных мест или очагов пожара обеспечивается путем применения спектральной съемки местности в трех диапазонах волн с последующей их обработкой, обеспечивающей достижение поставленной цели. Недостатком способа является его сложность и отсутствие возможности точного определения момента сброса огнегасящей жидкости с учетом координат очага пожара и условий полета летательного аппарата.
В настоящее время известно применение сенсоров ультрафиолетового излучения в диапазоне волн от 200 до 280 нм, называемых УФ-С сенсорами для обнаружения источников коронных и частичных разрядов, возникающих в местах неисправностей ЛЭП, а также очагов пожаров [2, 3].
Такие устройства устройство позволяют обнаруживать и изучать динамику процесса горения путем регистрации ультрафиолетовой части излучения на ранних стадиях пожара в условиях интенсивного солнечного излучения.
УФ-С диапазон имеет сравнительно низкий уровень фоновых помех и, в частности, слабый уровень мешающего излучения Солнца, поскольку солнечная радиация в указанном диапазоне сильно ослабляется озоновым слоем вокруг планеты. Указанное обстоятельство делает этот «солнечно-слепой» диапазон весьма привлекательным для создания систем, решающих различные технические задачи в условиях, когда солнечное излучение может экранировать полезный сигнал.
Известно устройство для детектирования ультрафиолетового излучения в УФ-С диапазоне (патент США №6104297, «Corona discharge detection system», МПК G08B 17/12; опубл. 15 августа 2000 г.), которое регистрирует УФ-С излучение в диапазоне 185-260 нм. Устройство содержит объектив, блок детектирования излучения и блок питания, Блок детектирования генерирует электрический сигнал в ответ на регистрацию ультрафиолетового излучения в заданном диапазоне. Затем этот электрический сигнал генерирует сигнал тревоги.
Существенными недостатками упомянутого устройства детектирования УФ-С излучения, предназначенного для дистанционной диагностики высоковольтных линий электропередач и обнаружения очагов пожаров, является то, что с его помощью можно только получить сигнал тревоги о наличии УФ-С излучения и только с помощью дополнительного устройства определить направление источника этого сигнала.
Известно также устройство для детектирования ультрафиолетового излучения в УФ-С диапазоне (патент РФ №104709, МПК G01J 1/00; опубл. 20 мая 2010 г.), которое предназначено для регистрации УФ-С излучения в диапазоне 250-280 нм. Устройство содержит объектив, блок детектирования излучения и блок питания и блок вычислителя. Это устройство позволяет регистрировать ультрафиолетовое излучение и определять его угловые координат.
Недостатком этого устройства является то, что оно не может быть использовано непосредственно для наведения летательного аппарата на очаг пожара и определения оптимального времени сброса огнегасящей жидкости. Вместе с тем по числу существенных признаков в части применения этого устройства данное техническое решения выбрано в качестве прототипа предлагаемого изобретения.
Технической задачей предлагаемого изобретения является создание способа наведения летательного аппарата на очаг пожара с помощью УФ-С устройства, работающего на длинах волн 250-280 нм, и определение оптимального времени сброса огнегасящей жидкости на этот очаг.
Главный технический результат изобретения состоит в обеспечении возможности определения автономно (без использования спутниковых систем) в любое время суток и в условиях задымленности очаг пожара и выбрать оптимальный момент сброса огнегасящей жидкости с летательного аппарата. Поскольку способ реализуется на основе солнечно-слепой системы, то ни солнечное излучение, ни дым пожара не оказывают существенного влияния на эффективность предлагаемого способа так как дым, создаваемый пожаром, лишь незначительно рассеивает УФ излучение, но не поглощает его (в отличие от инфракрасного излучения, которое часто используется для обнаружения пожаров) и вызывает только некоторое уширение контуров очага пожаров [2].
Изобретение обеспечивает возможность определения на борту носителя огнегасящей жидкости угловых координат очага пожара и точное срабатывание устройства сброса названной жидкости в условиях пересеченной местности. При этом использование координатной информации для наведения летательного аппарата на очаг пожара и выбор оптимального времени сброса воды осуществляется с учетом параметров полета носителя, скорости ветра и параметров модели оседания сброшенной воды.
Поставленные задача и результат достигаются за счет того, что в способе наведения летательного аппарата на очаг пожара и его тушения, в котором применяется датчик ультрафиолетового излучения с блоком детектирования, излучения в диапазоне длин волн 250-280 нм, обеспечивающим солнечно слепой режим работы, имеющим монитор для визуализации УФ-излучения. Датчик ультрафиолетового излучения размещают снаружи летательного аппарата так, что ось визирования датчика, первоначально совпадающая с осью летательного аппарата, отклоняется от надира на угол β0, зависящего от скорости ЛА и его высоты.
При получении на экран монитора пятна, указывающего на очаг возгорания, определяют на основании декартовских координат х и у, с учетом сноса летательного аппарата при наличии ветра, азимутальный угол α очага пожара, на который поворачивают ЛА и определяют угол визирования очага пожара Г=β0+β, где β - угол между осью визирования и направлением на цель, далее в случае плоского рельефа местности определяют горизонтальное расстояние до очага пожара Г=H⋅tg(Г), где Н - высота полета и наклонную дальность до очага пожара R=Н sec(Г), а затем по известным L и R, высоты полета Н и путевую скорость полета V, а также модели оседания облака воды после ее сброса с ЛА вычисляют оптимальный момент сброса огнегасящей жидкости.
В случае неровного рельефа местности после разворота ЛА на цель при расположении очага пожара на возвышенности определяют приращение высоты очага пожара относительно равнинной части рельефа h, где  где ϕ - угол между надиром и очагом пожара в начальной точке отсчета, а ψ - аналогичный угол после пролета расстояния d, tпр - время, за которое самолет пролетает расстояние d, выбор времени пролета определяют исходя из типа самолета, его скорости и выбирают минимальным для достижения достаточной точности определения момента сброса огнегасящей жидкости и при этом d=tпр V и остаточное горизонтальное расстояние до очага пожара
где ϕ - угол между надиром и очагом пожара в начальной точке отсчета, а ψ - аналогичный угол после пролета расстояния d, tпр - время, за которое самолет пролетает расстояние d, выбор времени пролета определяют исходя из типа самолета, его скорости и выбирают минимальным для достижения достаточной точности определения момента сброса огнегасящей жидкости и при этом d=tпр V и остаточное горизонтальное расстояние до очага пожара  .
.
При очаге пожара, находящемся в пониженной части рельефа, для расчета h и d' используют соотношения:  , на основании рассчитанных параметров определяют значения горизонтальных дальностей до очага пожара для случаев неровного рельефа и при известных значениях скорости и высоты полета носителя, а также модели оседания облака воды рассчитывают момент оптимального сброса огнегасящей жидкости, например, воды.
, на основании рассчитанных параметров определяют значения горизонтальных дальностей до очага пожара для случаев неровного рельефа и при известных значениях скорости и высоты полета носителя, а также модели оседания облака воды рассчитывают момент оптимального сброса огнегасящей жидкости, например, воды.
Существо изобретения поясняется на представленных фигурах.
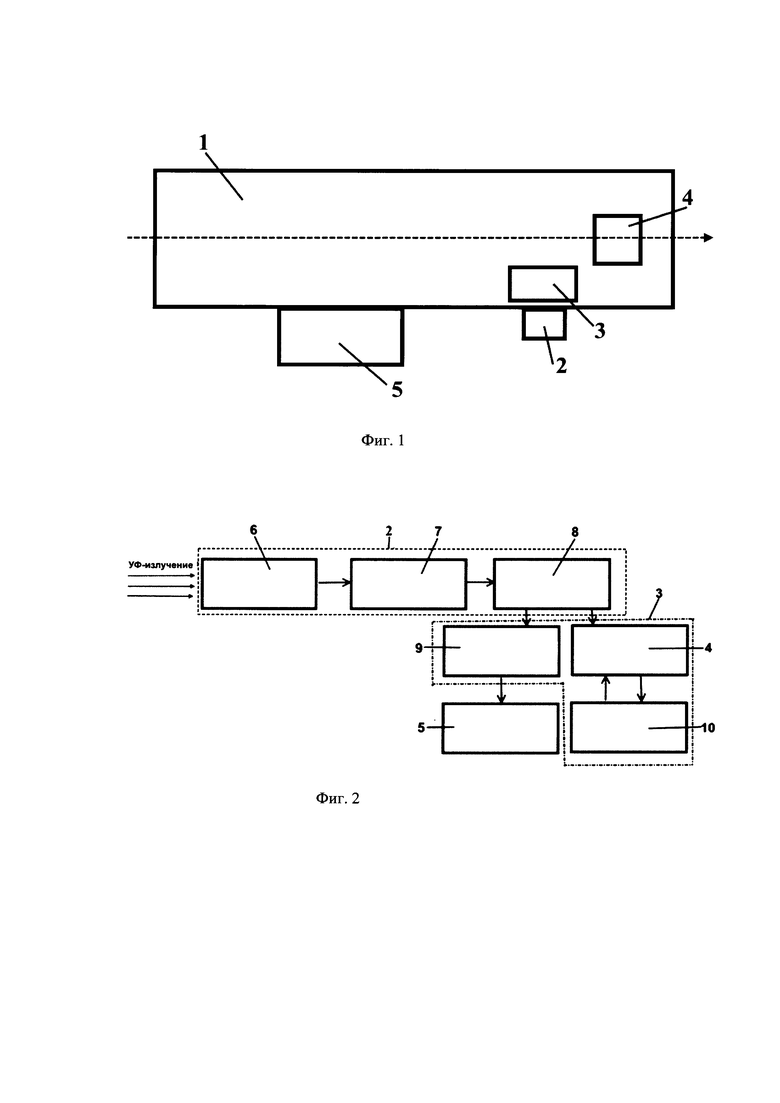
Фиг. 1 - схема размещения элементов системы на авиационном носителе огнегасящей жидкости (пунктиром со стрелкой обозначена продольная ось самолета-носителя).
Фиг. 2 - блок схема взаимодействия элементов сенсора, обеспечивающих реализацию способа.
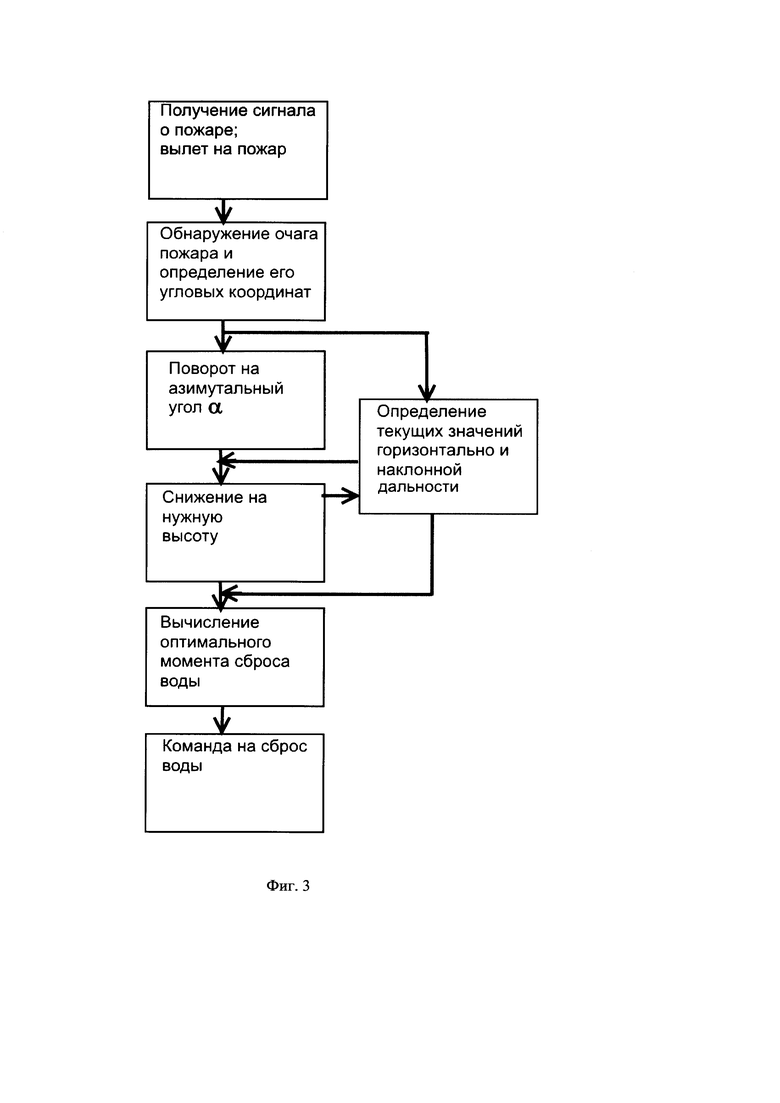
Фиг. 3 - схема последовательности операций при реализации способа.
Фиг. 4 - фото сигнала появления очага возгорания на экране монитора
Фиг. 5 - схема, поясняющая реализацию способа в условиях плоского рельефа местности.
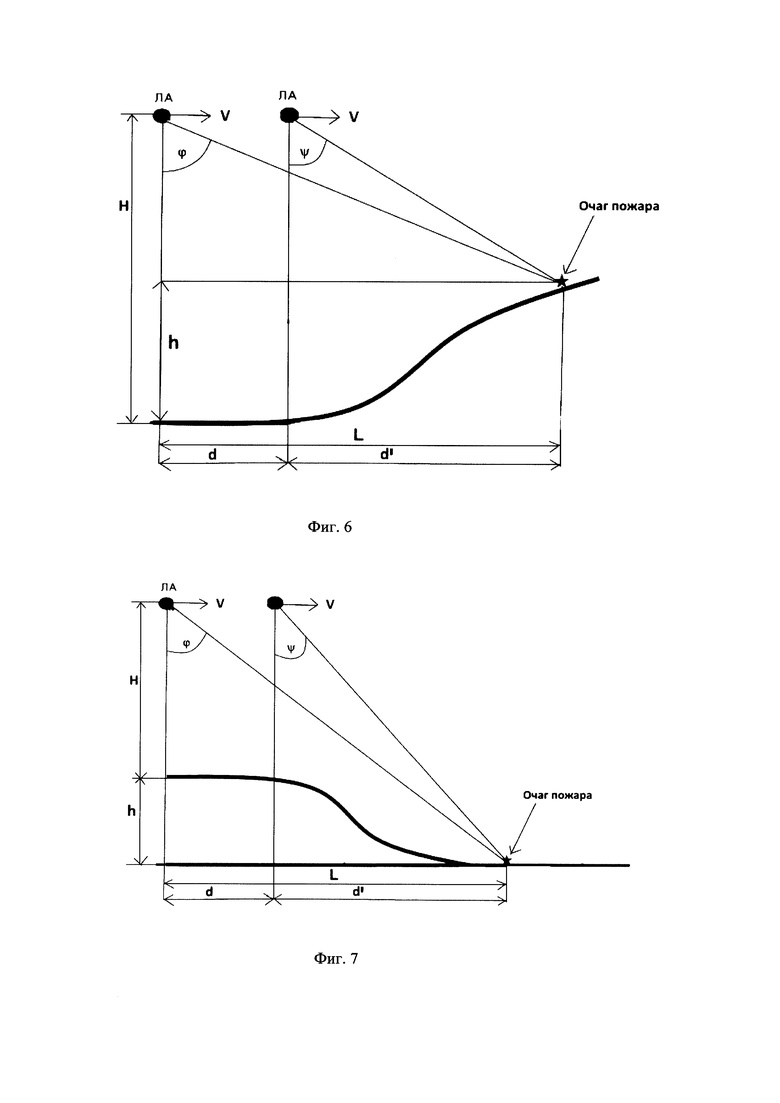
Фиг. 6 - схема, поясняющая реализацию способа в условиях нахождения очага пожара на возвышенности.
Фиг. 7 - схема, поясняющая реализацию способа в условиях нахождения очага пожара в условиях понижения рельефа местности.
Способ реализуют на летательном аппарате 1 (фиг. 1), снабженном ультрафиолетовым сенсором УФ-С диапазона (УФ-С сенсор) 2, блоком расчета траектории и управления летательным аппаратом 3 с монитором 4 и устройством сброса огнегасящей жидкости 5.
УФ-С сенсор 2 (выделен пунктирной линией) (фиг. 2) содержит объектив 6, монофотонный время-координатно-чувствительный датчик 7, вычислительный блок 8. Сигнал с блока 2 поступает в блок расчета и управления летательным аппаратом 3 (выделен штрих-пунктирной линией), который содержит монитор 4, блок расчета траектории летательного аппарата 9 и систему управления 10 летательным аппаратом. Команду на сброс огнегасящей жидкости на очаг пожара подают с блока 3 на устройство 5.
Предлагаемый способ реализуют следующим образом (фиг. 3) При получении сигнала о возгорании летательный аппарат после заправки огнегасящей жидкостью вылетает в район пожара. Задачей является точное обнаружение очага пожара независимо от времени суток и задымленности местности с последующим сбросом огнегасящей жидкости на очаг пожара с учетом параметров полета ЛА, скорости ветра и модели оседания огнегасящей жидкости. В процессе полета ЛА на входной объектив уультрафиолетового сенсора, снабженного режекторным кристаллами-фильтрами, поступает УФ-излучение (фиг. 2), исходящее от очага пожара. Телесный угол объектива может быть различным в зависимости от характера задач, решаемых системой, и типа носителя огнегасящей жидкости и может составлять от 30 до 120 град. Полоса пропускания фильтров составляет от 250 до 280 нм. Таким образом, объектив пропускает фотоны выбранного диапазона и подавляет все остальные длины волн. Согласно [3], коэффициент подавления фотонов с длинами волн, отличными от указанного выше диапазона может достигать 10-14. Вследствие этого обеспечивается «солнечно-слепой» режим регистрации УФ-С излучения, и устройство может работать в условиях интенсивного солнечного излучения, попадающего в объектив. Прошедший через объектив фотон излучения попадает на фотокатод время-координатного чувствительного детектора (ВКЧД). На выходном мониторе сенсора формируется изображение, отображающее источники УФ-С излучения, попадающие в телесный угол объектива. На фиг. 4 приведен пример отображения источника УФ-С излучения на экране монитора. Вычислительный блок рассчитывает координаты х и у (фиг. 4), а по ним, благодаря предварительной калибровке УФ-С на стенде, определяет угловые координаты очага пожара - углы α и. После вычисления углов очага пожара самолет разворачивают на угол α, так что ось самолета совпадает с осью у (фиг. 4). Ось визирования объектива сенсора лежит в вертикальной плоскости, проходящей через горизонтальную строительную ось ЛА - носителя огнегасящей жидкости. При этом ось визирования отклонена от надира на фиксированный угол β0 (фиг. 5). Угол поля зрения монофотонного сенсора в вертикальной плоскости Δβ может выбираться, исходя из типа ЛА и решаемых задач.
При появлении на экране индикатора изображения источника УФ-С излучения - очага пожара в виде яркого пятна (см. Фиг. 4) производится считывание координат его центра х и у, по которым, как уже было указано выше, определяются угловые координаты цели.
На фиг. 5 приведен случай обнаружения и тушения пожара в условиях плоского рельефа местности.
При получении информации об угле α, пилотом (штурманом) выдается команда на совершение разворота ЛА на азимут α, в результате которого пятно очага пожара оказывается на оси у. Таким образом, определяется угол визирования Г очага пожара: Г=β0+β (фиг. 5). Зная угол Г и располагая информацией о текущей высоте полета, получаемой со штатного бортового высотомера, с помощью компьютера рассчитывается горизонтальное расстояние до очага пожара L и наклонная дальность до него R:


Далее при известных значениях горизонтальной дальности до цели L, наклонной дальности R, высоты полета Н, вектора скорости ЛА V, а также модели оседания облака воды после ее сброса с ЛА блок управления сбросом огнегасящей жидкости, например, воды определяет оптимальный момент ее сброса.
После разворота ЛА на очаг возможны также случаи, когда очаг располагается на возвышенности или в низине для этих случаев расчет производится иначе.
При расположении очага на возвышенности (фиг. 6) определяют приращение высоты очага пожара относительно равнинной части рельефа h, которое равно

а остаточное горизонтальное расстояние до очага пожара d' может быть получено из соотношения:
где ϕ - угол между надиром и очагом пожара в начальной точке отсчета,
ψ - аналогичный угол после пролета расстояния d;
tпр - это время, за которое самолет пролетает расстояние d.
Время пролета tпр определяется исходя из типа самолета, его скорости и выбирается минимальным для достижения достаточной точности определения момента сброса огнегасящей жидкости и при этом d= tпр V.
При расположении очага пожара в пониженной части рельефа местности (фиг. 7) для расчета h и d' используют следующие соотношения:


С помощью формул (1-6) блоком расчета траектории ЛА (Фиг. 1) определяются значения горизонтальных дальностей до очага пожара, а при известных значениях скорости и высоты полета носителя, а также модели оседания облака воды рассчитывается момент оптимального сброса воды (такая модель описана, например, в работе [3].
Таким образом, предлагаемый способ позволяет в условиях интенсивного солнечного излучения, сильной задымленности, неровного рельефа, отсутствия спутниковой навигации находить очаг пожара, определять его координаты и вычислять момент срабатывания системы слива огнегасящей жидкости.
Предлагаемый способ легко реализуется на практике, так как требует использования доступной аппаратуры (УФ-С - сенсор), выпускаемой серийно.
Источники информации
1. Брюханов А.В., Коршунов Н.А. Авиационное тушение природных пожаров: история, современное состояние, проблемы и перспективы СИБИРСКИЙ ЛЕСНОЙ ЖУРНАЛ. 2017. №5. С. 37-54.
2. И.Д. Родионов, А.И. Родионов, И.П. Родионова, Д.В. Шестаков, В.Д. Песков, В.В. Егоров, А.П. Калинин, Н.А. Матвеева ПРОХОЖДЕНИЕ УФ-С-, ВИДИМОГО И БЛИЖНЕГО ИНФРАКРАСНОГО ИЗЛУЧЕНИЙ ЧЕРЕЗ АТМОСФЕРУ ХИМИЧЕСКАЯ ФИЗИКА, 2019, том 38, №11, с. 1.
3. Белов А.А., Егоров В.В., Калинин А.П., Коровин Н.А., Родионов А.И., Родионов И.Д., Степанов С.Н. Монофотонный сенсор ультрафиолетового диапазона «Корона». Датчики и системы. №12. 2012. С. 58-60.
4. Москвилин Е.А. Применение авиации для тушения лесных пожаров "Пожарная безопасность" №1 с. 89-92. 2009.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТУШЕНИЯ ОЧАГОВ ПОЖАРОВ С ВОЗДУШНЫХ НОСИТЕЛЕЙ | 2017 |
|
RU2685077C2 |
| СПОСОБ ТУШЕНИЯ ОЧАГОВ ПОЖАРА | 1995 |
|
RU2113872C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА, ОСНОВАННАЯ НА МОНОФОТОННОЙ УФ-С ТЕХНОЛОГИИ ДЛЯ НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ ВОЗДУШНОГО СУДНА | 2014 |
|
RU2564934C1 |
| СПОСОБ ПОЖАРОТУШЕНИЯ С ИСПОЛЬЗОВАНИЕМ БРОНИРОВАННОЙ МАШИНЫ | 2009 |
|
RU2403932C1 |
| СПОСОБ ПОЖАРОТУШЕНИЯ С ПРИМЕНЕНИЕМ БРОНИРОВАННОЙ МАШИНЫ | 2009 |
|
RU2403931C1 |
| БЕСПИЛОТНОЕ АВИАЦИОННОЕ УЛЬТРАФИОЛЕТОВОЕ СОЛНЕЧНО-СЛЕПОЕ ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ И АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПРИЧИН ВОЗНИКНОВЕНИЯ ЛЕСНЫХ ПОЖАРОВ | 2023 |
|
RU2809664C1 |
| СИСТЕМА И СПОСОБ ТУШЕНИЯ ПОЖАРА | 2020 |
|
RU2744324C1 |
| СПОСОБ И УСТРОЙСТВО ОПТИЧЕСКОЙ ЛОКАЦИИ С ПОМОЩЬЮ СЕНСОРА УЛЬТРАФИОЛЕТОВОГО ИЗЛУЧЕНИЯ | 2009 |
|
RU2433424C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2826399C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242019C2 |

Предлагаемый способ относится к способам обнаружения, определения координат очагов пожара и выбора оптимального момента сброса огнегасящей жидкости с летательного аппарата. Для наведения летательного аппарата применяют датчик ультрафиолетового излучения с блоком детектирования излучения в диапазоне длин волн 250-280 нм, обеспечивающим солнечно-слепой режим работы, имеющим монитор для визуализации УФ-излучения. При этом датчик ультрафиолетового излучения размещают снаружи летательного аппарата так, что ось визирования датчика, первоначально совпадающая со строительной осью летательного аппарата, отклоняется от надира на угол β0, зависящего от скорости летательного аппарата и его высоты. При получении на экране монитора пятна, указывающего на очаг возгорания, определяют на основании декартовских координат х и у, с учетом сноса летательного аппарата при наличии ветра, азимутальный угол α очага пожара, на который поворачивают летательный аппарат и определяют угол визирования очага пожара. В случае плоского рельефа местности определяют горизонтальное расстояние до очага пожара L и наклонную дальность до очага пожара R. По известным L, R, высоты полета Н и путевой скорости полета V, с учетом модели оседания облака воды после ее сброса с летательного аппарата вычисляют оптимальный момент сброса огнегасящей жидкости. В случае неровного рельефа местности после разворота носителя на цель при расположении очага пожара на возвышенности или в пониженной части рельефа определяют приращение или занижение высоты очага пожара относительно равнинной части рельефа h. Время пролета, исходя из типа летательного аппарата и его скорости, выбирают минимальным для достижения достаточной точности определения момента сброса огнегасящей жидкости. На основании рассчитанных параметров определяют значения горизонтальных дальностей до очага пожара для случаев неровного рельефа и при известных значениях скорости и высоты полета летательного аппарата, а также модели оседания облака воды рассчитывают момент оптимального сброса огнегасящей жидкости. Обеспечивается создание способа наведения летательного аппарата на очаг пожара с помощью УФ-С устройства, работающего на длинах волн 250-280 нм, определение на борту носителя угловых координат очага пожара и точное срабатывание устройства сброса в условиях пересеченной местности, использование координатной информации для наведения летательного аппарата на очаг пожара и выбор оптимального времени сброса огнегасящей жидкости. 1 з.п. ф-лы, 7 ил.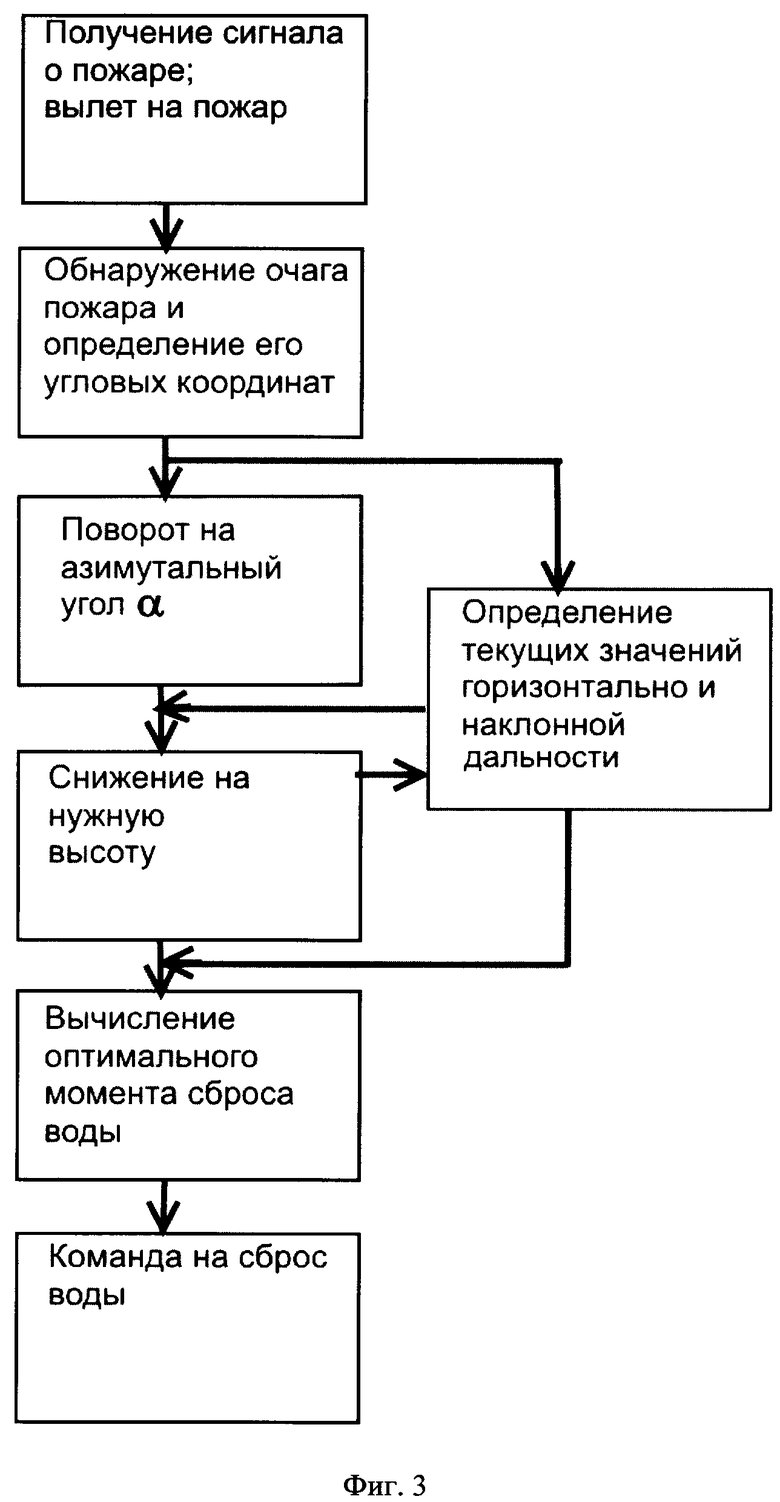
1. Способ наведения летательного аппарата на очаг пожара и его тушения огнегасящей жидкостью, в котором применяется датчик ультрафиолетового излучения с блоком детектирования излучения в диапазоне длин волн 250-280 нм, обеспечивающим солнечно-слепой режим работы, имеющим монитор для визуализации УФ-излучения, отличающийся тем, что датчик ультрафиолетового излучения размещают снаружи летательного аппарата так, что ось визирования датчика, первоначально совпадающая со строительной осью летательного аппарата, отклоняется от надира на угол β0, зависящего от скорости летательного аппарата и его высоты, при получении на экран монитора пятна, указывающего на очаг возгорания, определяют на основании декартовских координат х и у, с учетом сноса летательного аппарата при наличии ветра, азимутальный угол α очага пожара, на который поворачивают летательный аппарат и определяют угол визирования очага пожара Г=β0+β, где β - угол между осью визирования и направлением на цель, далее в случае плоского рельефа местности определяют горизонтальное расстояние до очага пожара L=H⋅tg(Г), где Н - высота полета, и наклонную дальность до очага пожара R=Н sec(Г), а затем по известным L и R, высоте полета Н и путевой скорости полета V, а также модели оседания облака воды после ее сброса с летательного аппарата вычисляют оптимальный момент сброса огнегасящей жидкости;
в случае неровного рельефа местности после разворота носителя на цель при расположении очага пожара на возвышенности определяют приращение высоты очага пожара относительно равнинной части рельефа h, где 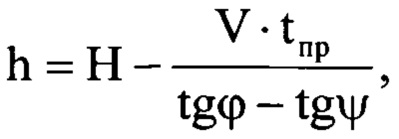 где ϕ - угол между надиром и очагом пожара в начальной точке отсчета, а ψ - аналогичный угол после пролета расстояния d, tпp - время, за которое самолет пролетает расстояние d, выбор времени пролета определяют исходя из типа летательного аппарата, его скорости и выбирают минимальным для достижения достаточной точности определения момента сброса огнегасящей жидкости и при этом d=tпp V и остаточное горизонтальное расстояние до очага пожара
где ϕ - угол между надиром и очагом пожара в начальной точке отсчета, а ψ - аналогичный угол после пролета расстояния d, tпp - время, за которое самолет пролетает расстояние d, выбор времени пролета определяют исходя из типа летательного аппарата, его скорости и выбирают минимальным для достижения достаточной точности определения момента сброса огнегасящей жидкости и при этом d=tпp V и остаточное горизонтальное расстояние до очага пожара 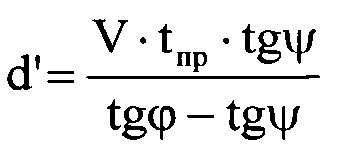
при очаге пожара, находящемся в пониженной части рельефа, для расчета h и d' используют соотношения: 
на основании рассчитанных параметров определяют значения горизонтальных дальностей до очага пожара для случаев неровного рельефа и при известных значениях скорости и высоты полета летательного аппарата, а также модели оседания облака воды рассчитывают момент оптимального сброса огнегасящей жидкости.
2. Способ по п. 1, в котором в качестве огнегасящей жидкости применяют воду.
| Устройство для перелопачивания солода на току | 1956 |
|
SU104709A1 |
| СПОСОБ ТУШЕНИЯ ОЧАГОВ ПОЖАРА | 1995 |
|
RU2113872C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| US 4091273 A1, 23.05.1978. | |||

