Заявляемое изобретение относится к способу и устройству определения расстояния до отдельных точек объекта и угла, под которым видна эта точка, и на этой основе создание систем трехмерного зрения, позволяющих получать трехмерные изображения в цифровом виде.
Для определения расстояния до объекта можно использовать различные системы, в том числе и радиолокационные. Однако радиолокационные системы, как правило, дают низкую точность определения координат, а их работа может быть затруднена помехами от подстилающей поверхности. Кроме того, они характеризуются высокой стоимостью и достаточно значительными массогабаритными показателями.
Другой подход - использовать оптические системы локации, работающие в видимом и ИК-диапазоне. Отметим, что к недостаткам этих систем относятся природные и антропогенные источники помех, наличие бликов от Солнца. Это заставляет применять узконаправленные (одноэлементные или многоканальные - до 100-200 каналов) механически сканирующие системы. Высокочувствительные ПК-системы дороги и сложны в эксплуатации и имеют сильно ограниченный ресурс, а доступные системы обладают низкой чувствительностью.
Современные оптические локаторы обычно выполняются в виде механически сканирующих модулей из соосно установленных фотоэлектронных умножителей (ФЭУ) с узкоугольной оптикой и лазера. Механическое сканирование связки ФЭУ и лазера, необходимое для создания систем локации некоторой конкретной области пространства, является серьезным фактором, ограничивающим возможность таких локаторов. Развитие лавинопролетных фотоприемных диодов и эффективных источников излучения на базе излучающих диодов обеспечивает современную реализацию этой концепции, продвигающую характеристики системы за счет многоканального сканирования. Однако при этом все равно сохраняются принципы механического сканирования и однопозиционный принцип приема-регистрации отраженного излучения.
Одной из причин такого построения современных оптических локаторов являются атмосферные фоновые засветки как в видимом, так и в ИК-диапазонах. Поэтому узкоугольная оптика позволяет максимально блендировать естественные фоновые засветки, а высокий уровень мощности поступающего в апертуру приемника отраженного сигнала обеспечивает превышение сигнала над остаточным фоном и внутренними шумами приемника. Вследствие этого обеспечивается неэффективное использование лазерного излучения подсветки - от тысяч до сотен тысяч отдельных фотонов на входе фотоприемника для измерения одной точки исследуемого пространства. Кроме того, обычно используются достаточно протяженные импульсы излучения в 10 нс и более, а временная привязка с точностью на уровне 1 нс достигается привязкой по фронту принимаемого сигнала, что также требует достаточно высокого уровня подсветки и ограничивает возможности применения в мутных средах.
Известен способ оптической локации (Заявка RU №94026858/09, МПК G01S 15/00, опубл. 20.05.1996 г.), включающий в себя импульсное излучение в световом диапазоне и последующий прием и обработку отраженного сигнала. При реализации этого способа оптико-механическое сканирующее устройство осуществляет сканирование однострочной развертки по вертикали в одном направлении, одновременно осуществляет также сканирование этой развертки по азимуту в режиме кругового или секторного обзоров и при этом инфракрасный приемник осуществляет развертку, опережающую лазерную по углу места, и тем самым увеличивается точность локации целей.
К недостаткам этого способа относится необходимость выполнения оптико-механического сканирования в комбинации с приемом и обработкой инфракрасного излучения от объекта, что в целом приводит к усложнению способа и снижению надежности при его применении.
Задачей, поставленной при создании настоящего изобретения, является преодоление указанных недостатков, повышение надежности и расширение функциональных возможностей способа оптической локации.
Техническим результатом является создание надежного способа определения положения в пространстве сразу нескольких объектов в трехмерном измерении независимо от состояния атмосферы.
Поставленная задача решается, а указанный результат достигается тем, что в способе оптической локации, включающем в себя импульсное излучение в световом диапазоне и последующий прием и обработку отраженного сигнала, излучение ведут в диапазоне ультрафиолетовых длин волн, краткосрочный импульс излучения производят на основании выдачи короткого строба на излучатель, а регистрацию отдельных отраженных фотонов осуществляют на основании выдачи длинного строба, при этом угол прихода отраженного фотона, определение расстояния до объекта и его координаты определяют посредством время-координатно-чувствительного детектора. Излучение ведут в ультрафиолетовом спектре в диапазоне длин волн 250-280 нм. Продолжительность короткого строба составляет 1 нс, а продолжительность длинного строба определяется требуемой дальностью локации.
Известно также устройство для оптической локации (Заявка RU №94026858/09, МПК G01S 15/00, опубл. 20.05.1996 г.), содержащее излучатель и приемник излучения, в котором наряду с лазерным передатчиком использован инфракрасный приемник излучения.
Недостатком известного устройства является сложная система сканирования и использование ИК-излучения, которое делает этот локатор чувствительным к природным и антропогенным источникам помех.
Задачей настоящего изобретения является упрощение конструкции локатора и повышение надежности его работы.
Техническим результатом является обеспечение получения необходимой информации независимо от наличия естественных или искусственных помех.
Поставленная задача решается, а указанный результат достигается тем, что в устройстве оптической локации, содержащем излучатель и приемник излучения, в качестве излучателя применен широкоугольный излучатель ультрафиолетового излучения, а в качестве приемника ультрафиолетового излучения подключенный к излучателю широкоугольный приемник, причем излучатель и приемник по отдельным каналам связи подключены к электронному блоку управления устройства.
В качестве широкоугольного приемника излучения может быть применен время-координатно-чувствительный детектор, состоящий из солнечно-слепого объектива с кристаллическим фильтром, пропускающим излучение ультрафиолетового излучения и задерживающим излучение других диапазонов, снабженный контроллером, позволяющий определять время прихода регистрируемого фотона и угол его прихода. Преимуществом предлагаемого способа и устройства, функционирующего на его основе, является использование УФ-С диапазона длин волн для оптической локации и применение специальных широкоугольных источника УФ-С диапазона (подсвечивающего объект) и УФ-С приемника (сенсора), позволяющего определять не только расстояние до различных точек объекта, но и находить угол, под которым сенсор «видит» эти точки. Это обеспечивает получение трехмерных изображений зондируемых объектов.
В предлагаемом изобретении используется УФ-С диапазон длин волн для оптической локации, так как в этом диапазоне солнечное излучение не будет создавать помехи и оптическую локацию можно будет проводить в дневное время и при прямых солнечных засветках. Применение широкоугольных источника УФ-С излучения и УФ-С приемника позволяет избежать сканирование источником и приемником излучения. В данном изобретении предлагается использовать такой приемник УФ-С излучения, который будет регистрировать не только время прихода отраженного от объекта фотона (и тем самым позволять определять расстояния до точки объекта, от которого отразился фотон), но и определять угол прихода фотона (т.е. определять угол, под которым эта точка видна регистрирующим устройством). При этом реализуется предельно эффективное использование энергии подсветки по принципу «один зарегистрированный фотон - одна трехмерная координата местности». Таким образом, комбинация этих возможностей позволяет создавать системы трехмерного оптического зрения. Достижение трехмерности зрения достигается тем, что в описываемой системе наряду с широкоугольным УФ-С излучателем используется специальный широкоугольный монофотонный сенсор УФ-С излучения с системой фильтров и линз, пропускающих только УФ-С излучение, а для регистрации этого излучения используется время-координатно-чувствительный детектор (ВКЧД). Этот детектор позволяет не только регистрировать время прихода фотона, но и определять углы прихода этого фотона.
Сущность предлагаемого способа и устройства, функционирующего на его основе, поясняется схематично чертежами,
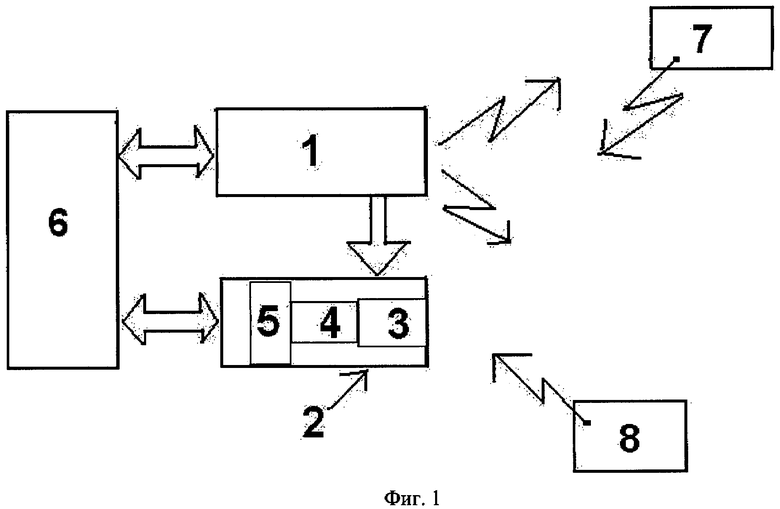
где на фиг.1 схематично представлено устройство, с помощью которого реализуется предлагаемый способ;
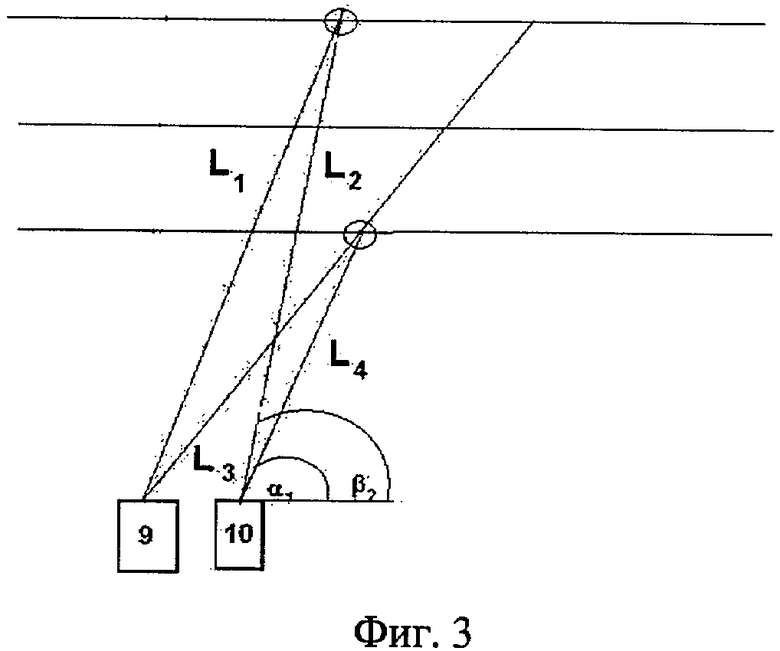
на фиг.2 представлен алгоритм работы предлагаемого устройства;
на фиг.3 поясняется метод определения расстояния до точек объектов в поле зрения предлагаемого локатора.
Устройство, в котором реализуется предлагаемый способ, содержит широкоугольный УФ-С излучатель 1, широкоугольный приемник УФ-С излучения 2, в котором имеется объектив 3, пропускающий только длины волн заданного УФ-С диапазона и формирующий изображение на входе время-координатно-чувствительного детектора 4, контроллер 5, позволяющий определять время прихода регистрируемого фотона и угол его прихода, блок электроники 6, управляющий работой всего устройства. Зондируемые объекты обозначены позициями 7 и 8.
Оптический локатор работает следующим образом: в одном цикле приемник УФ-С излучения выдает в широкоугольный УФ-источник короткий строб (фиг.2) на начало и конец излучения (~1 нс), запускает сброшенный счетчик времени; источник и выдает широкий строб на приемник излучения, в течение которого разрешен прием отраженного фотона. УФ за время строба выдает световой импульс малой длительности (~1 нс) в широком угловом диапазоне; приемник УФ-излучения фиксирует по счетчику времени время прихода фотонов, отраженных от отдельных точек диагностируемых объектов в течение времени, определяемого вторым стробом, который значительно больше времени первого строба и определяется тем максимальным расстоянием от предлагаемого устройства, на котором должно производиться дистанционное зондирование. За время большого строба приемнику разрешается зарегистрировать только один отраженный фотон. Также для каждого отраженного и зарегистрированного фотона определяется угол, под которым эта точка объекта видна приемником излучения. При последовательном осуществлении описанного выше цикла получаются данные, которые позволяют получить трехмерные изображения всех объектов, которые находятся в поле зрения излучателя и приемника.
На фиг.3 поясняется принцип определения расстояния до точки объекта и угол, под которым приходит зарегистрированный фотон (рисунок плоский) от зарегистрированного фотона по времени прохождения фотона от излучателя 9 до объекта и от объекта до приемника 10. Так как расстояния L1 с большой степенью точности равно L2, a L3=L4, то среднее расстояние до каждой точки объекта определяется по формуле
L=t*C/2
Здесь t - время прохождения импульса фотонов до точки объекта и обратно, С - скорость света.
Определение угла и времени фотона осуществляется с помощью время-координатно-чувствительного детектора. В качестве примера такого устройства может быть ВКЧД, использующий микроканальные пластины для усиления сигнала от отраженного фотона, и специальный коллектор, позволяющий определять координаты прихода фотона на вход ВКЧД, а по ним определять углы прихода этого фотона.
Отличительной особенностью предлагаемого локатора является отсутствие сканирования, одновременный прием фотонов, отраженных как с различных углов зрения, так и от различных объектов, находящихся на одной линии и частично прозрачных. Кроме того, возможность за счет математической обработки отфильтровывать рассеянные на неоднородностях среды фотоны, что обеспечивает его применение в мутных слабопрозрачных средах, в которых с одного направления могут приходить фотоны как от среды, так и от объектов, находящихся на пути луча.
Таким образом, возможно использование единичных фотонов для определения координат по времени задержки и координатам точки отражения в режиме единичного счета - однофотонного режима. Реализуется принцип «один фотон - одна трехмерная точка местности».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГИСТРАЦИИ УЛЬТРАФИОЛЕТОВОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2431121C2 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ КАЧЕСТВА ИЗОЛЯЦИИ ОБЪЕКТОВ ВЫСОКОВОЛЬТНЫХ ЭЛЕКТРИЧЕСКИХ УСТАНОВОК ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2402030C1 |
| Способ наведения летательного аппарата на очаг пожара и его тушения огнегасящей жидкостью | 2019 |
|
RU2725596C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375724C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ В ЛАЗЕРНОМ КОГЕРЕНТНОМ ЛОКАТОРЕ С МАТРИЧНЫМ ФОТОПРИЕМНИКОМ | 2007 |
|
RU2354994C1 |
| Способ синхронизированной регистрации рентгеновского излучения и вторичного флуоресцентного излучения в монофотонном режиме при облучении образца рентгеновским излучением | 2022 |
|
RU2793568C1 |
| СПОСОБ ФОТОННОЙ ЛОКАЦИИ ВОЗДУШНОГО ОБЪЕКТА | 2012 |
|
RU2497079C1 |
| Способ получения оптических изображений объектов, наблюдаемых при больших угловых скоростях, и устройство для его реализации | 2017 |
|
RU2653087C1 |
| СПОСОБ ДОСТАВКИ НА ЦЕЛЬ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 1987 |
|
SU1839888A1 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОРОННЫХ РАЗРЯДОВ | 2015 |
|
RU2612937C1 |
Способ включает в себя импульсное излучение в диапазоне ультрафиолетовых длин волн и последующий прием и обработку отраженного сигнала. Короткий импульс излучения производят на основании выдачи короткого строба на излучатель, а регистрацию отдельных отраженных фотонов осуществляют на основании выдачи длинного строба. Угол прихода отраженного фотона, расстояние до объекта и его координаты определяют посредством время-координатно-чувствительного детектора. Устройство оптической локации содержит широкоугольный излучатель ультрафиолетового излучения и приемник излучения. В качестве приемника ультрафиолетового излучения применен время-координатно-чувствительный детектор, снабженный контроллером и соединенный с объективом. Детектор обеспечивает регистрацию отдельных отраженных фотонов, определение угла прихода отраженного фотона, определение расстояния до объекта и его координат. Технический результат - обеспечение получения необходимой информации независимо от наличия естественных или искусственных помех. 2 н. и 2 з.п. ф-лы, 3 ил.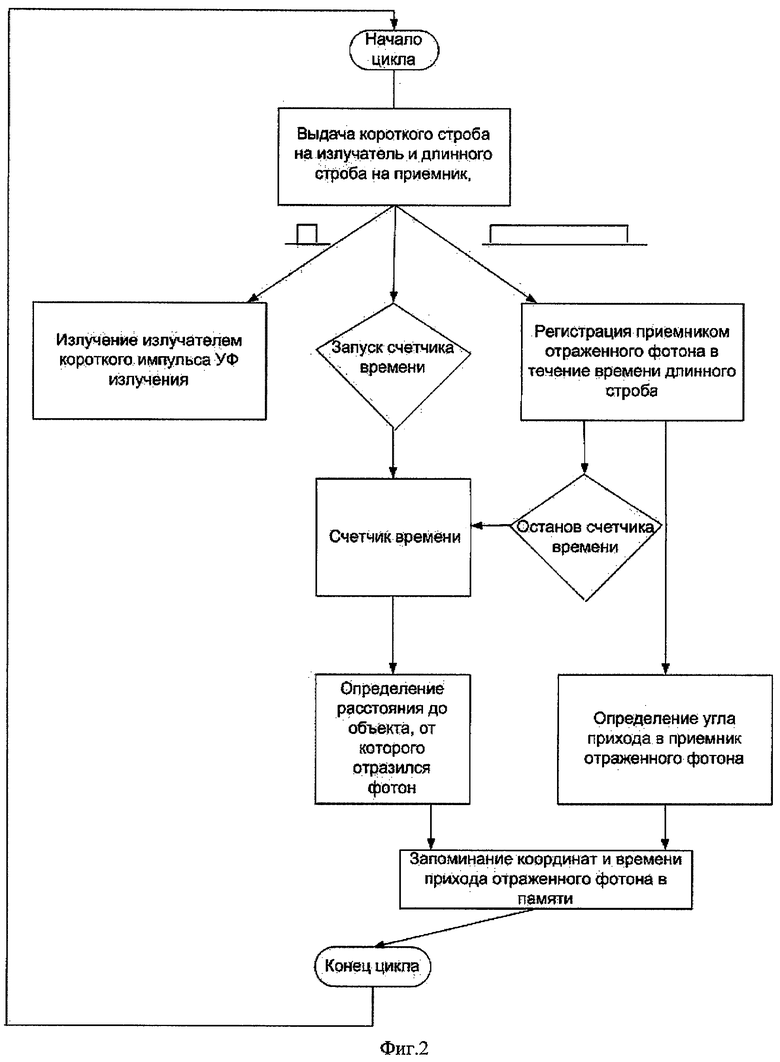
1. Способ оптической локации с помощью сенсора ультрафиолетового излучения, включающий в себя импульсное излучение в световом диапазоне и последующий прием и обработку отраженного сигнала, отличающийся тем, что излучение ведут в диапазоне ультрафиолетовых длин волн, короткий импульс излучения производят на основании выдачи короткого строба на излучатель, а регистрацию отдельных отраженных фотонов осуществляют на основании выдачи длинного строба, при этом угол прихода отраженного фотона, определение расстояния до объекта и его координаты определяют посредством время-координатно-чувствительного детектора.
2. Способ по п.1, отличающийся тем, что излучение ведут в диапазоне волн 250-280 нм.
3. Способ по п.1, отличающийся тем, что продолжительность короткого строба составляет 1 нс, а продолжительность длинного строба определяется требуемой дальностью локации.
4. Устройство оптической локации с помощью сенсора ультрафиолетового излучения, содержащее излучатель и приемник излучения, отличающееся тем, что в качестве излучателя применен широкоугольный излучатель ультрафиолетового излучения, а в качестве приемника ультрафиолетового излучения применен время-координатно-чувствительный детектор, снабженный контроллером и соединенный с объективом, обеспечивающий регистрацию отдельных отраженных фотонов, а также определение угла прихода отраженного фотона, определение расстояния до объекта и его координат, широкоугольный излучатель подключен к приемнику, кроме того, излучатель и приемник по отдельным каналам связи подключены к электронному блоку управления устройства.
| СПОСОБ НОЧНОГО И/ИЛИ ДНЕВНОГО НАБЛЮДЕНИЯ УДАЛЕННОГО ОБЪЕКТА С СИНХРОННОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ ЛАЗЕРНЫМИ ИМПУЛЬСАМИ ПОДСВЕТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2269804C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ СРЕДСТВАМ ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2226278C2 |
| RU 2006141513 A, 27.05.2008 | |||
| US 2007024840 A1, 01.02.2007 | |||
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2249234C1 |

