Область техники
Изобретение относится к пожарной технике, а именно к оптико-электронным средствам мониторинга лесных пожаров, представляющих собой систему наблюдения и контроля за пожарной опасностью в лесу по условиям погоды, за состоянием лесных горючих материалов, за источниками огня и лесными пожарами с целью своевременной разработки и проведения мероприятий по предупреждению лесных пожаров и (или) снижения ущерба от них [1]. Лесной пожар - неконтролируемый процесс горения, распространяющийся в лесах [2]. Важным является определение причин возникновения лесных пожаров. От этого зависит объем финансовых и материальных средств, выделяемых на борьбу с лесными пожарами. Причины возникновения лесных пожаров различны и состоят из двух групп: природные (сухие грозы, самовозгорание торфяников) и антропогенные (брошенные зажженные спички и непотушенные окурки, непогашенный костер, раскаленные выхлопные газы и искры от автотранспортных средств, неостывший шлак из печей железнодорожных пассажирских вагонов, сжигание отходов или сухой травы, выжигание полей, умышленные поджоги, нарушение правил пожарной безопасности пользования огнем и т.д.). Утверждается, что доля антропогенных причин возникновения лесных пожаров составляет 95%. Хотя прямых результатов измерения этого параметра никто не приводит вследствие отсутствия соответствующей аппаратуры.
Уровень техники
Для обнаружения лесных пожаров можно использовать различные информационные признаки: повышенную температуру, выбросы в атмосферу газообразных продуктов горения (Н2О, СО, СО2, СН4, С2Н2, непредельные углероды), дымовые шлейфы и т.д. Кроме того, известно, что пламя (огонь) пожара имеет сильное излучение в ультрафиолетовой, видимой и инфракрасной областях спектра. В настоящее время известны следующие способы обнаружения лесных пожаров: наземные способы обнаружения пожаров RU 2259854 C1, А62С 3/02, опубл. 10.09.2005 в бюл. №25, RU 2343944, А62С 3/02, опубл. 20.01.2009 в бюл. №2, способы представляют собой наблюдение с вышек за лесным массивом и патрулирование местности по специально разработанным маршрутам. Недостатком является человеческий фактор, так как сам наблюдатель не робот, может уснуть, а для патрулирования требуется большое количество людей. Авиационное патрулирование SU 1225584 А1, А62С 3/02, опубл. 23.04.1986, SU 16485505 A1, А62С 3/02, опубл. 15.05.1991 в бюл. №18, способ заключается в использовании легкомоторных самолетов, вертолетов или беспилотных летательных аппаратов. Недостатком являются высокие финансовые затраты, особенно при использовании крупной летательной техники. Требуется также подготовка специализированных кадров, в том числе и на управление беспилотными летательными аппаратами. Космические средства мониторинга [3,4], RU 2147253 C1, А62С 3/02, A01G 23/00, опубл. 10.04.2000 в бюл. №10; RU 2336107 С2, А62С 3/02, A01G 23/00 2006, опубл. 20.10.2008 в бюл. №29, RU 2423160 C1, А62С 3/02, опубл. 05.05.2010 в бюл. №19. Недостатком является изначальная дорогостоящая подготовка спутника и закупка дорогостоящего оборудования, диапазон определения очага пожара площадью не менее чем от 1 до 50 Га, периодичность получения данных всего несколько раз в сутки. Известен способ дистанционного обнаружения лесных пожаров из космоса с помощью телевизионных систем, установленных на борту космического аппарата и передающих снимки дымовых шлейфов [5]. Однако данный способ становится неработоспособным в присутствии облаков и в темное время суток.
Известные устройства имеют следующие общие недостатки: большое время обнаружения лесного пожара, отсутствие возможности автоматического определения точных географических координат лесного пожара, работа в основном в светлое время суток и при хорошей погоде (отсутствие тумана, дождя и снега). Отсутствие возможности автоматического обнаружения лесных пожаров, отсутствие возможности автоматического определения причин возникновения лесных пожаров.
Наиболее близким к изобретению по технической сущности и достигаемому результату является беспилотный авиационный комплекс для определения координат коронных разрядов RU 2612937 C1, В64С 39/02, опубл. 13.03.2017 в бюл. №8 (прототип) содержащий беспилотный летательный аппарат и наземную станцию управления и контроля, беспилотный летательный аппарат включает в себя несущий каркас, на котором в вершинах воображаемого многоугольника жестко зафиксированы, по меньшей мере, шесть электродвигателей с пропеллерами с контролируемой частотой вращения, причем диаметрально расположенные электродвигатели имеют встречное направление вращения, электродвигатели связанны с аккумулятором и компьютером, который связан с системой авианаблюдения, выполненной в виде ультрафиолетового солнечно-слепого пеленгатора на основе многоанодного фотоумножителя, приемником GPS/ГЛОНАСС, регулятором вращения электродвигателей, приемо-передатчиком, акселерометром, компасом, высотомером (альтиметром), гироскопом, компьютер выполнен с возможностью управления частотой вращения электродвигателей, при этом обеспечивая горизонтальное положение беспилотного летательного аппарата по сигналам акселерометра и гироскопа, обеспечивая изменение курса и высоты беспилотного летательного аппарата по сигналам управления с наземной станции управления и контроля, а также обеспечения контроля и управления беспилотным летательным аппаратом на основании координат спутниковой навигационной системы по сигналам приемника GPS/ГЛОНАСС для выполнения в автоматическом режиме полетного задания с возвращением на взлетную площадку. Область применения устройства не ограничивается электроэнергетикой. Устройство может быть использовано в любой области, где требуется определять точные географические координаты мест ультрафиолетового излучения. Известное устройство может в реальном времени автоматически зафиксировать момент появления ультрафиолетового излучения, может автоматически определить точные географические координаты мест ультрафиолетового излучения, может автоматически снять сигнатуру ультрафиолетового излучения [6].
Недостатком известного устройства является отсутствие возможности автоматического определения причин возникновения лесных пожаров.
Раскрытие сущности изобретения
Задачей, на решение которой направлено настоящее изобретение, является создание беспилотного авиационного ультрафиолетового солнечно-слепого оптико-электронного устройства для автоматического обнаружения лесных пожаров и автоматического определения причин возникновения лесных пожаров на основе регистрации ультрафиолетового излучения от пламени (огня) пожара.
Техническим результатом, достигаемым при использовании изобретения, является возможность автоматически в реальном времени обнаружить лесной пожар, автоматически в реальном времени определить точные географические координаты лесного пожара, возможность работать в любое время суток (днем и ночью) и при плохой погоде (наличие тумана, дождя и снега).
Указанная задача настоящего изобретения решается тем, что в известном изобретении RU 2612937 C1, В64С 39/02, опубл. 13.03.2017 в бюл. №8, содержащим беспилотный летательный аппарат и наземную станцию управления и контроля, беспилотный летательный аппарат включает в себя несущий каркас, на котором в вершинах воображаемого многоугольника жестко зафиксированы, по меньшей мере, шесть электродвигателей с пропеллерами с контролируемой частотой вращения, причем диаметрально расположенные электродвигатели имеют встречное направление вращения, электродвигатели связаны с аккумулятором и компьютером, который связан с системой авианаблюдения, выполненной в виде ультрафиолетового солнечно-слепого пеленгатора на основе многоанодного фотоумножителя, приемником GPS/ГЛОНАСС, регулятором вращения электродвигателей, приемопередатчиком, акселерометром, компасом, высотомером (альтиметром), гироскопом, компьютер выполнен с возможностью управления частотой вращения электродвигателей, при этом обеспечивая горизонтальное положение летательного аппарата по сигналам акселерометра и гироскопа, обеспечивая изменение курса и высоты летательного аппарата по сигналам управления с наземной станции управления и контроля, а также обеспечения контроля и управления летательным аппаратом на основании координат спутниковой навигационной системы по сигналам приемника GPS/ГЛОНАСС для выполнения в автоматическом режиме полетного задания с возвращением на взлетную площадку, наземная станция управления и контроля включает в себя компьютер, пульт управления, антенну приемника GPS/ГЛОНАСС, приемник GPS/ГЛОНАСС, антенну приемо-передатчика, приемо-передатчик, аккумулятор, все люди на охраняемой территории обеспечены персональными GPS-трекерами, а на наземной станции управления и контроля установлен сервер мониторинга с антенной сотовой связи, принимающий сигналы с GPS-трекеров.
GPS-трекер (также GPS-контроллер) - устройство приема-передачи данных для спутникового контроля автомобилей, людей или других объектов, к которым оно прикрепляется, использующее GPS/ГЛОНАСС для точного определения местонахождения объекта [7].
Ультрафиолетовый солнечно-слепой пеленгатор должен быть обязательно выполнен на основе многоанодного фотоумножителя RU 2520726 С1, G01J 1/42, опубл. 27.06.2014, бюл. №18, так как сейчас только такой тип ультрафиолетового солнечно-слепого пеленгатора может регистрировать сигнатуру ультрафиолетового излучения объектов.
Краткое описание чертежей
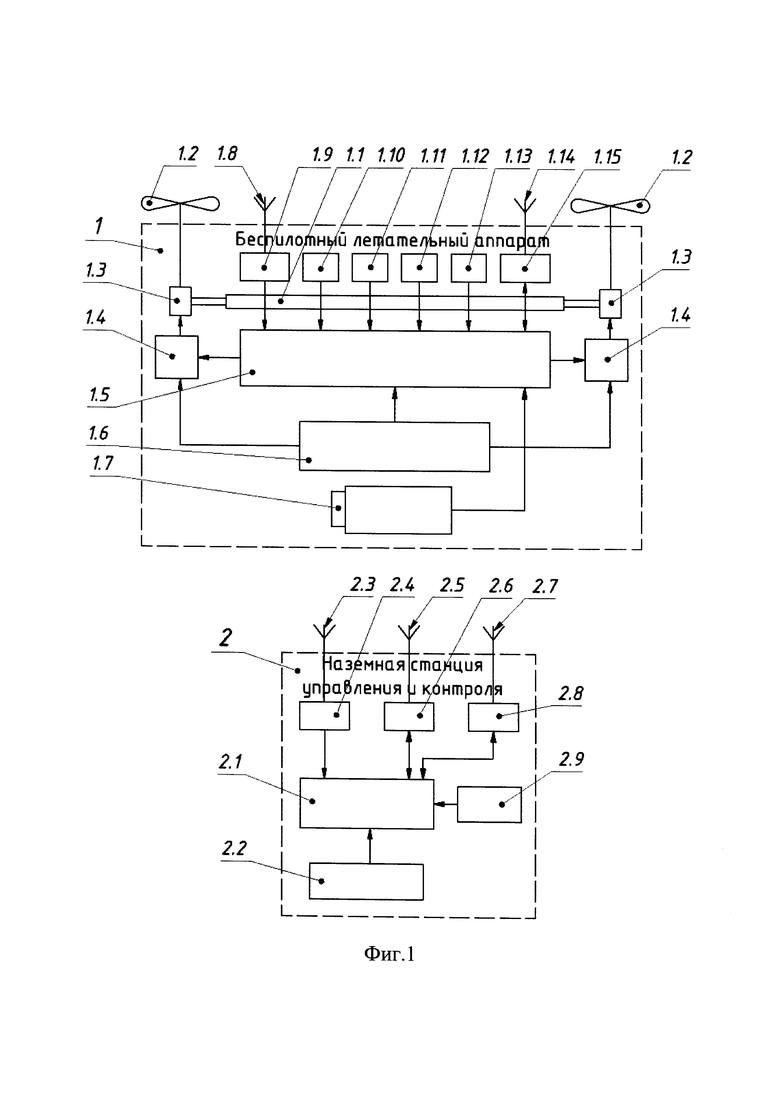
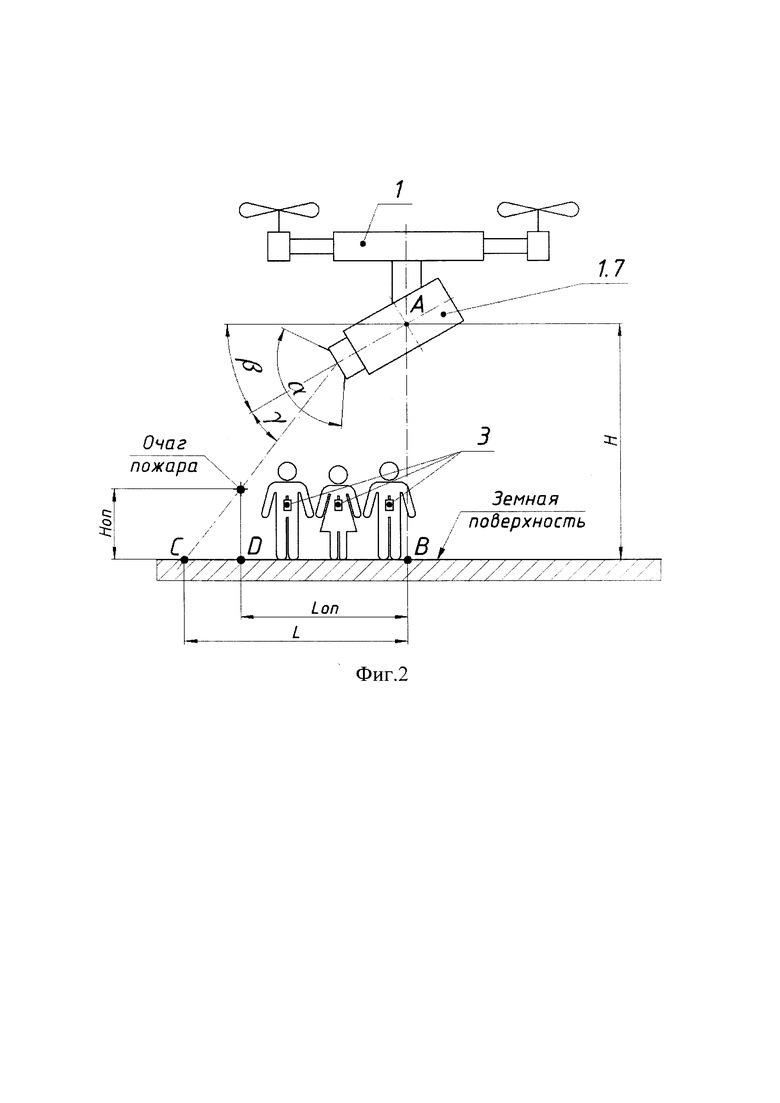
На фиг. 1 представлена структурная схема беспилотного авиационного ультрафиолетового солнечно-слепого оптико-электронного устройства для автоматического обнаружения лесных пожаров и автоматического определения причин возникновения лесных пожаров, на фиг. 2 представлена схема, поясняющая принцип автоматического определения географических координат лесных пожаров и географических координат людей с персональными GPS-трекерами.
Осуществление изобретения
Устройство содержит:
1 - беспилотный летательный аппарат (БЛА, беспилотник, коптер, мультикоптер):
1.1 - несущий каркас;
1.2 - пропеллеры;
1.3 - электродвигатели;
1.4 - регуляторы вращения электродвигателей;
1.5 - компьютер; 1.6- аккумулятор;
1.7 - ультрафиолетовый солнечно-слепой пеленгатор;
1.8 - антенна приемника GPS/ГЛОНАСС;
1.9 - приемник GPS/ГЛОНАСС;
1.10 - акселерометр;
1.11 - компас;
1.12 - высотомер (альтиметр);
1.13 - гироскоп;
1.14 - антенна приемо-передатчика;
1.15 - приемо-передатчик.
2 - наземная станция управления и контроля:
2.1 - компьютер;
2.2 - пульт управления;
2.3 - антенна приемника GPS/ГЛОНАСС;
2.4 - приемник GPS/ГЛОНАСС;
2.5 - антенна приемо-передатчика;
2.6 - приемо-передатчик;
2.7 - антенна сотовой связи (GPRS, 3G и др.);
2.8 - сервер мониторинга;
2.9 - аккумулятор.
Обозначения, указанные на фиг. 2 означают следующее:
α - угол поля зрения ультрафиолетового солнечно-слепого пеленгатора; β - угол наклона оптической оси ультрафиолетового солнечно-слепого пеленгатора относительно земной поверхности; γ - угол между оптической осью ультрафиолетового солнечно-слепого пеленгатора и направлением на источник ультрафиолетового излучения (очаг пожара); Н - высота ультрафиолетового солнечно-слепого пеленгатора над земной поверхностью (точка A); L - расстояние от проекции центра координат ультрафиолетового солнечно-слепого пеленгатора (точка В) до точки С (пересечение прямой направления на источник ультрафиолетового излучения (очаг пожара) с земной поверхностью). Ноп - высота очага пожара над земной поверхностью. Lon - расстояние от проекции центра координат ультрафиолетового солнечно-слепого пеленгатора на земную поверхность (точка В) до проекции центра координат очага пожара на земную поверхность (точка D).
Устройство работает следующим образом. Устройство может работать в автоматическом режиме полета и в ручном режиме полета.
Работа в автоматическом режиме полета
Оператор на наземной станции управления и контроля 2 с помощью компьютера 2.1 задает беспилотнику географические координаты маршрута полета и высоту полета по маршруту. Оператор с помощью наземной станции управления и контроля 2 дает команду беспилотнику 1 на начало полета. Компьютер 1.5 беспилотника 1 с помощью приемника GPS/ГЛОНАСС 1.9 определяет текущие географические координаты беспилотника 1, сравнивает их с первыми заданными географическими координатами и, управляя электродвигателями 1.3 через регуляторы вращения электродвигателей 1.4, направляет беспилотник 1 в первую точку географических координат заданного маршрута. Компьютер 1.5 беспилотника 1 с помощью высотомера 1.12 измеряет текущую высоту полета беспилотника 1, сравнивает ее с первой заданной высотой полета и, управляя электродвигателями 1.3 через регуляторы вращения электродвигателей 1.4, поднимает беспилотник на первую заданную высоту. После этого устройство начинает облет заданного маршрута. При запуске устройства начинает работать и ультрафиолетовый солнечно-слепой пеленгатор 1.7. При полете по маршруту ультрафиолетовый солнечно-слепой пеленгатор 1.7 сразу же готов автоматически зафиксировать ультрафиолетовое излучение от любых имеющихся источников ультрафиолетового излучения. Ультрафиолетовый солнечно-слепой пеленгатор 1.7 автоматически определяет угловые координаты источника ультрафиолетового излучения (очага пожара) относительно своей оптической оси. Зная фокусное расстояние объектива ультрафиолетового солнечно-слепого пеленгатора 1.7, пеленгатор 1.7 определяет угол у (фиг. 2) между своей оптической осью и направлением на источник ультрафиолетового излучения (очаг пожара). Компьютер 1.5 зная с помощью высотомера 1.12 высоту полета устройства Н, зная с помощью приемника GPS/ГЛОНАСС 1.9 текущие географические координаты устройства, зная с помощью компаса 1.11 направление полета устройства, определяет расстояние L и географические координаты точки С (фиг. 2). Таким образом, определяется уравнение первой прямой, на которой расположен источник ультрафиолетового излучения (очаг пожара). Для второй точки маршрута указанная последовательность действий повторяется и определяется уравнение второй прямой, на которой находится источник ультрафиолетового излучения (очаг пожара). Совместное решение этих двух уравнений позволяет найти географические координаты и высоту над поверхностью земли места текущего источника ультрафиолетового излучения (очага пожара). Указанная последовательность действий может повторяться для всех остальных имеющихся источников ультрафиолетового излучения (очагов пожара), таким образом автоматически определяются координаты всех остальных имеющихся источников ультрафиолетового излучения (очагов пожара). Географические координаты каждого источника ультрафиолетового излучения (очага пожара) записываются в запоминающее устройство компьютера 1.5. Кроме того, ультрафиолетовый солнечно-слепой пеленгатор 1.7 на основе многоанодного фотоумножителя автоматически регистрирует амплитудно-временную характеристику (сигнатуру) источника ультрафиолетового излучения (очага пожара). По сигнатуре источника ультрафиолетового излучения (очага пожара) компьютер 1.5. определяет причину пожара (брошенная зажженная спичка, брошенный непотушенный окурок, непогашенный костер, раскаленные выхлопные газы и искры от автотранспортных средств, неостывший шлак из печей железнодорожных пассажирских вагонов, сжигание отходов или сухой травы, выжигание полей и т.д.). Одновременно с обнаружением и определением географических координат пожаров компьютер 2.1 наземной станции управления и контроля 2 получает от индивидуальных GPS-трекеров через антенну сотовой связи 2.7 и сервер мониторинга 2.8 географические координаты всех людей на охраняемой территории. Компьютер 2.1 наземной станции управления и контроля 2 сравнивает координаты пожаров и людей. Если координаты пожара и человека совпадают, то пожару присваивается статус "антропогенный", если координаты пожара и человека не совпадают, то пожару присваивается статус "природный". Компьютер 2.1 наземной станции управления и контроля 2 подсчитывает количество "антропогенных" пожаров N антр. и количество "природных" пожаров N прир. Компьютер 2.1 наземной станции управления и контроля 2 подсчитывает процент "антропогенных" Р антр. и "природных" Р прир. пожаров по формулам:
где: N общ. - общее количество пожаров.
Компьютер 2.1 наземной станции управления и контроля 2 отображает на своем мониторе всю полученную информацию. Кроме того, компьютер 2.1 наземной станции управления и контроля 2 при обнаружении первого лесного пожара подает сигнал тревоги, отображает на своем мониторе карту охраняемой территории, на карте охраняемой территории компьютер 2.1 специальными значками отображает свое расположение, расположение беспилотника, местонахождение пожаров и людей.
Несущий каркас 1.1 служит для размещения всех устройств беспилотника. Пропеллеры 1.2 служит в полете для поддержания беспилотника на заданной высоте. Аккумулятор 1.6 обеспечивает питания всех устройств беспилотника. Через антенну приемника GPS/ГЛОНАСС 1.8 приемника GPS/ГЛОНАСС 1.9 компьютер 1.5 получает навигационную информацию. Акселерометр 1.10 и гироскоп 1.13 служат для поддержания беспилотника в горизонтальном положении. Через антенну приемо-передатчика 1.14 и приемо-передатчик 1.15 идет обмен информацией между беспилотником 1 и наземной станцией управления и контроля 2. Через антенну приемника GPS/ГЛОНАСС 2.3 приемник GPS/ГЛОНАСС 2.4 компьютер 2.1 получает навигационную информацию. Через антенну приемо-передатчика 2.5 приемо-передатчика 2.6 идет обмен информацией между наземной станцией управления и контроля 2 и беспилотником 1. Антенна сотовой связи 2.7 и сервер 2.8 служат для получения координат людей. Аккумулятор 2.9 служит для питания всех устройств наземной станции управления и контроля 2.
Работа в ручном режиме полета
Оператор с помощью пульта управления 2.2 наземной станции управления и контроля 2 запускает беспилотник 1 и начинает движение по маршруту. Ультрафиолетовый солнечно-слепой пеленгатор 1.7 включен и наблюдает за окружающим пространством. Дальнейшие действия происходят аналогично работе в автоматическом режиме полета.
Для увеличения поля зрения ультрафиолетовый солнечно-слепой пеленгатор на основе многоанодного фотоумножителя может быть оснащен сверхширокоугольной оптикой RU 2542641 C1 G02B 1/42, G02B 13/14, опубл. 20.02.2015, бюл. №5.
В качестве беспилотника может быть использован беспилотник любого типа: самолетный, вертолетный, мультикоптерный, конвертопланный и т.д. В настоящее время в России занимаются беспилотниками более 100 фирм [8, 9] на любой вкус и кошелек. Для обеспечения эффективности применения при обнаружении лесных пожаров и определения причин возникновения лесных пожаров беспилотник должен обладать следующими характеристиками:
Грузоподъемность - 2…5 кг (масса ультрафиолетового солнечно-слепого пеленгатора).
Крейсерская скорость полета - больше 100 км/час, чем больше скорость, тем большую площадь леса может облететь беспилотник на одной заправке.
Длительность полета на одной заправке - не менее 8 часов.
Остальные параметры беспилотников не носят принципиального характера, так как сейчас практически все беспилотники имеют все необходимые технические устройства для использования беспилотников при обнаружении лесных пожаров и определения причин возникновения лесных пожаров.
В качестве GPS-трекеров могут быть использованы современные мобильные телефоны и смартфоны с установленными приложениями для отправки местоположения устройства на сервер мониторинга.
Источники информации
1. ГОСТ Р 22.1.09-99 Безопасность в чрезвычайных обстоятельствах. Мониторинг и прогнозирование лесных пожаров. Общие требования.
2. ГОСТ Р 59058-2020 Охрана окружающей среды. ЗАЩИТА, РАЦИОНАЛЬНОЕ ИСПОЛЬЗОВАНИЕ И ВОСПРОИЗВОДСТВО ЛЕСОВ. Термины и определения.
3. Спутниковый мониторинг лесных пожаров в России. Итоги. Проблемы. Перспективы / Н.А. Абушенко, Д.А. Алтынцев, В.Н. Антонов [и др.] // Экология. Серия аналитических обзоров мировой литературы. - 2003. - №70. - С. 1-135.-EDNHKZOIP.
4. Курбатский, Н.П. Обнаружение и анализ лесных пожаров / Н.П. Курбатский. - Красноярск: Институт леса и древесины им. В.Н. Скачева СО АН СССР, 1977. - 162 с. - EDN TGLTWR.
5. Шагарова, Ю.О. Спутниковый мониторинг лесных пожаров в России / Ю.О. Шагарова // Актуальные проблемы авиации и космонавтики: сборник материалов VIII Международной научно-практической конференции, посвященной Дню космонавтики: в 3 т., Красноярск, 11-15 апреля 2022 года. Том 2. - Красноярск: Федеральное государственное бюджетное образовательное учреждение высшего образования "Сибирский государственный университет науки и технологий имени академика М.Ф. Решетнева", 2022. - С. 709-711. - EDN CHJJBK.
6. Родионов, А.И. Сигнатурные методы исследования некоторых физико-химических процессов: дис…. канд. физико-математ. наук: 01.04.17: защищена 19.11.08: / Родионов Алексей Игоревич. - М., 2008. - 158 с.
7. GPS-трекер https://ru.wikipedia.org/wiki/GPS-трекер
8. Российские беспилотники: [сайт]. - Москва, 2022 - URL: https://russiandrone.ru (дата обращения: 28.01.2023). - Текст электронный.
9. База данных №RU 2021620554, Российская Федерация. База данных беспилотных воздушных судов: №2021620417: дата регистрации: 15.03.2023, дата публикации: 24.03.2021 / Данилов Н.И., Каниовский А.Е. - 5 ГБ.
Изобретение относится к пожарной технике, а именно к оптико-электронным средствам мониторинга лесных пожаров. Беспилотное авиационное ультрафиолетовое солнечно-слепое оптико-электронное устройство содержит беспилотный летательный аппарат, на котором установлен ультрафиолетовый солнечно-слепой пеленгатор на основе многоанодного фотоумножителя, и наземную станцию управления и контроля, на которой дополнительно установлен сервер мониторинга с антенной сотовой связи, принимающий сигналы с GPS-трекеров от персональных GPS-трекеров людей, находящихся на охраняемой территории. Ультрафиолетовый солнечно-слепой пеленгатор выполнен с возможностью автоматически фиксировать ультрафиолетовое излучение очага пожара и регистрировать его амплитудно-временную характеристику. Достигается возможность автоматически обнаружить лесной пожар, определить точные географические координаты пожара, определить причины возникновения пожаров, работать в любое время суток и при плохой погоде. 2 ил.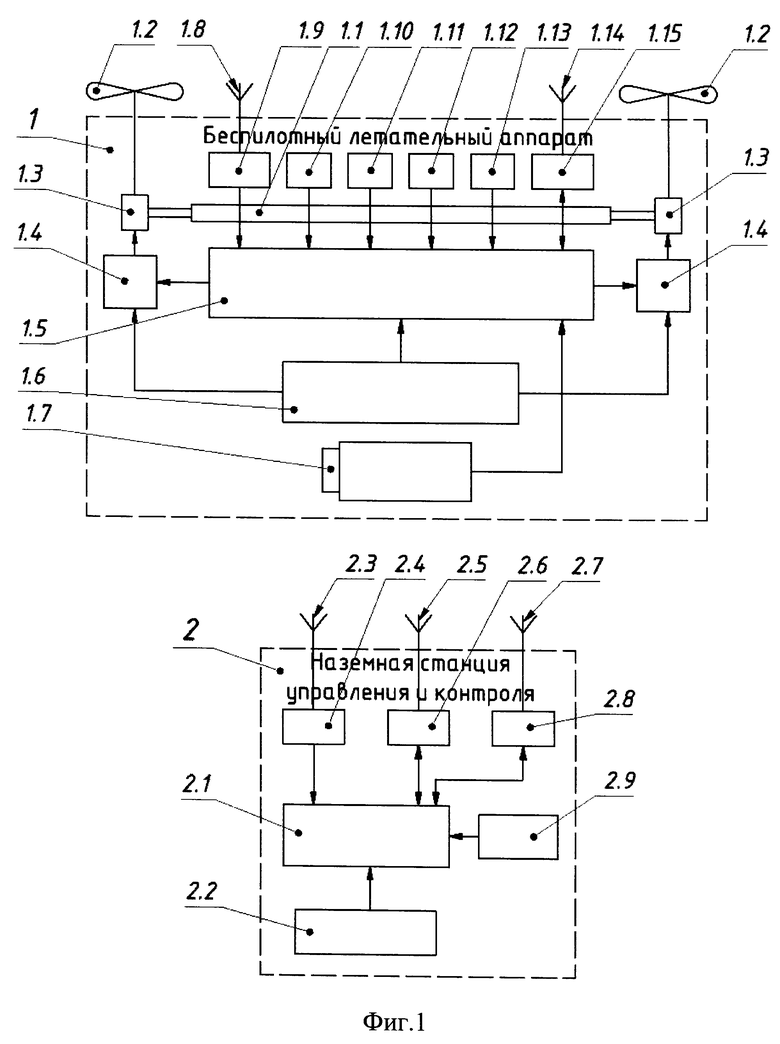
Беспилотное авиационное ультрафиолетовое солнечно-слепое оптико-электронное устройство для автоматического обнаружения лесных пожаров и автоматического определения причин лесных пожаров, содержащее беспилотный летательный аппарат и наземную станцию управления и контроля, при этом беспилотный летательный аппарат включает в себя несущий каркас, на котором в вершинах воображаемого многоугольника жестко зафиксированы по меньшей мере шесть электродвигателей с пропеллерами с контролируемой частотой вращения, причем диаметрально расположенные электродвигатели имеют встречное направление вращения, электродвигатели связаны с аккумулятором и компьютером, который связан с системой авианаблюдения, выполненной в виде ультрафиолетового солнечно-слепого пеленгатора на основе многоанодного фотоумножителя, приемником GPS/ГЛОНАСС, регулятором вращения электродвигателей, приемо-передатчиком, акселерометром, компасом, высотомером, гироскопом, компьютер выполнен с возможностью управления частотой вращения электродвигателей, при этом обеспечивая горизонтальное положение летательного аппарата по сигналам акселерометра и гироскопа, обеспечивая изменение курса и высоты летательного аппарата по сигналам управления с наземной станции управления и контроля, а также обеспечения контроля и управления летательным аппаратом на основании координат спутниковой навигационной системы по сигналам приемника GPS/ГЛОНАСС для выполнения в автоматическом режиме полетного задания с возвращением на взлетную площадку, наземная станция управления и контроля включает в себя компьютер, пульт управления, антенну приемника GPS/ГЛОНАСС, приемник GPS/ГЛОНАСС, антенну приемо-передатчика, приемо-передатчик, аккумулятор, при этом на наземной станции управления и контроля дополнительно установлен сервер мониторинга с антенной сотовой связи, принимающий сигналы с GPS-трекеров от персональных GPS-трекеров людей, находящихся на охраняемой территории, при этом ультрафиолетовый солнечно-слепой пеленгатор выполнен с возможностью автоматически фиксировать ультрафиолетовое излучение очага пожара и регистрировать его амплитудно-временную характеристику, а компьютер выполнен с возможностью определения причины пожара по амплитудно-временной характеристике излучения очага пожара.
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОРОННЫХ РАЗРЯДОВ | 2015 |
|
RU2612937C1 |
| Киреев А | |||
| Дроны с сенсорами определяют пожары на начальной стадии | |||
| Новости Хайтек, 25.05.2021, https://hightech.fm/2021/05/25/drone-fires | |||
| Персональный ГЛОНАСС/GPS трекер | |||
| Новости НТЦ БИТЛАЙТ, 25.10.2021, https://bitlite.ru/glonass-gps/personalnyj-glonass-gps-treker/?ysclid=lnedl2fw1e869745548 | |||
| Бесплатный спутниковый | |||

