Изобретение относится к способам ведения воздушной артиллерийской разведки и может быть использовано для корректировки стрельбы артиллерии по целям, ненаблюдаемым с огневых позиций.
Известны четыре основных способа применения беспилотных летательных аппаратов (БПЛА) самолетного типа для обслуживания стрельбы артиллерии [1]: от местных ориентиров, «на пролете», при помощи дальномера и по нескольким последовательным азимутам на цель. Рассмотрение способов в [1] проводится применительно к отечественному БПЛА «Орлан-10». Их основное предназначение состоит в определении координат целей для формирования начальных установок для стрельбы (целеуказания). Общим недостатком способов являются ограниченные возможности по формированию последующих корректирующих поправок. Прежде всего, это связано с отсутствием возможности зависания аппаратов данного типа над целью. Кроме того, им свойственны низкая оперативность и невысокая точность целеуказания.
Известен способ пристрелки целей с помощью дистанционно-пилотируемого летательного аппарата (ДПЛА) [2]. Помимо определения координат целей способ предусматривает определение отклонений разрывов от цели в ходе пристрелки и стрельбы на поражение. Пристрелку ведут по целям, координаты которых определены этим же аппаратом или другими средствами. В последнем случае координаты уточняют при обнаружении цели ДПЛА. Недостатком способа является то, что его изложение ограничивается описанием организационных мер (взаимодействия командира комплекса воздушной разведки с командиром и пунктом управления огнем артиллерийского дивизиона) и не содержит необходимые правила расчета.
Наиболее близким к заявляемому изобретению является способ корректировки огня артиллерии с использованием квадрокоптера [3], принятый за прототип (пристрелки цели по терминологии прототипа). Для определения корректирующих поправок предлагается использовать квадрокоптер с видеокамерой и пульт управления с планшетом (вычислительной системой). Очевидно, по умолчанию предполагается также оснащение квадрокоптера системой спутниковой навигации и инерциальной системой угловой ориентации, которые являются обязательными элементами существующих комплексов БПЛА как мультикоптерного, так и самолетного типа. «Видеоизображение от цели передается на видеокамеру квадрокоптера, неподвижно зависшего на высоте, затем видеоизображение в режиме реального времени передается с видеокамеры на планшет».
Ключевым здесь является вопрос масштабирования видеоизображения. В соответствии с [3] для этого по цели выполняют два выстрела дымовыми снарядами с прицелами, различающимися по дальности на 200 м. По изображениям на планшете дымовых облаков в местах падения снарядов корректировщик измерительной линейной измеряет расстояние l в миллиметрах между точками разрывов снарядов и определяет масштаб по формуле M=200/l, м/мм. Также линейкой в миллиметрах измеряют отклонения точки разрыва второго дымового снаряда от цели по дальности l1 и направлению l2, по значениям которых с учетом масштаба М рассчитывают реальные отклонения снаряда в метрах L1= l1M, L2= l2M. По значениям L1, L2 определяют и вводят корректирующие поправки, после чего производят выстрел боевым снарядом. Отклонения боевого снаряда L1, L2 от цели рассчитывают по той же методике. При нахождении отклонений L1, L2 в установленных нормах переходят к стрельбе на поражение. При превышении норм пристрелка продолжается.
Недостатками способа-прототипа [3] являются низкие точность и оперативность определения корректирующих поправок. Это обусловлено следующими обстоятельствами.
Задание мерного интервала на местности (в прототипе это 200 м), необходимого для определения масштаба видеоизображения М, по облакам от разрывов дымовых снарядов дает грубую оценку этого интервала. Причинами являются как естественные размытость и подвижность дымовых облаков, так и погрешности реального местоположения точек падения самих снарядов при пристрелке на исчисленных установках прицела. Понятно, что также грубым оказывается мерный интервал (в миллиметрах), задаваемый соответствующим видеоизображением на экране планшета (вычислительной системы).
Низкую точность дает выполняемое корректировщиком вручную с помощью линейки измерение длины мерного интервала на видеоизображении. (Заметим, что при наличии современной вычислительной системы, позволяющей с высокой точностью автоматизировать измерительные и расчетные операции, в прототипе предусмотрено грубое ручное измерение величин). В результате низкую точность имеет рассчитанный масштаб М.
Сказанное справедливо для следующего шага расчета отклонений l1, l1, L1, L2 второго дымового снаряда от цели и последующих шагов пристрелки.
Следствием рассмотренных обстоятельств является низкая итоговая точность определения корректирующих поправок.
Одновременно указанные обстоятельства обусловливают низкую оперативность подготовки поправок: предварительные пристрелочные выстрелы дымовыми снарядами, ручные трудоемкие операции измерения и расчета отклонений, масштаба и корректирующих поправок требуют значительных временных затрат. К дополнительным потерям времени (в силу низкой точности расчетов) также приводит необходимость последующей неоднократной пристрелки боевыми снарядами.
Цель заявляемого изобретения состоит в создании высокоточного и оперативного способа корректировки огня артиллерии с использованием мультикоптера.
Для достижения поставленной цели в способе корректировки огня артиллерии с использованием мультикоптера, заключающемся в том, что применяют бортовую видеокамеру и наземный пульт управления с вычислительной системой, с помощью которых определяют масштаб видеоизображения, учитываемый при расчете корректирующих поправок, с помощью бортовых систем спутниковой навигации и угловой ориентации обеспечивают зависание мультикоптера с видеокамерой в надирном положении на требуемой высоте над целью с заданными прямоугольными плановыми координатами, с помощью специального программного блока, встраиваемого в программное обеспечение вычислительной системы, по значениям высоты мультикоптера и углового поля зрения видеокамеры вычисляют длину диагонали фиксируемого видеокамерой прямоугольного участка местности, делением длины диагонали участка в метрах на длину диагонали видеокадра в пикселах определяют масштаб видеоизображения в районе цели, в реальном масштабе времени совмещают на видеоизображении первое перекрестие подкамерной точки с центром изображения цели и второе подвижное перекрестие с центром изображения разрыва пристрелочного снаряда, при этом автоматически считываемые с видеокадра разности координат центров в пикселах с учетом масштаба видеоизображения переводят в соответствующие разности в метрах, которые в качестве корректирующих поправок используют при последующих выстрелах снарядами на поражение.
Технический результат состоит в повышении точности и оперативности корректировки огня артиллерии при использовании мультикоптера.
Существенные отличительные признаки заявляемого способа по сравнению с прототипом заключаются в следующем.
1. С помощью бортовых систем спутниковой навигации и угловой ориентации обеспечивают зависание мультикоптера с видеокамерой в надирном положении на требуемой высоте над целью с заданными прямоугольными плановыми координатами. Этим гарантируются попадание цели в поле зрения видеокамеры, неискаженное отображение прилегающего прямоугольного участка местности с центром в точке нахождения цели и требуемые линейные размеры элементарной ячейки подстилающей поверхности, приходящейся на один пиксел (масштаб видеоизображения).
В прототипе расположение квадрокоптера относительно цели не обсуждается. В описании лишь говорится о «квадрокоптере, неподвижно зависшем на высоте».
2. Делением длины диагонали участка в метрах на длину диагонали видеокадра в пикселах определяют масштаб видеоизображения в районе цели. Этот метод обеспечивает высокую точность предварительного расчета масштаба до выстрелов боевыми снарядами.
В прототипе диагонали участка и видеокадра не рассматриваются. Масштаб определяется по грубо заданному на местности расстоянию между облаками от разрывов дымовых снарядов и неточно измеренному линейкой его отображению на экране планшета.
3. В реальном масштабе времени совмещают на видеоизображении первое перекрестие подкамерной точки с центром изображения цели и второе подвижное перекрестие с центром изображения разрыва пристрелочного снаряда.
В прототипе эта функция отсутствует.
4. Автоматически считываемые с видеокадра разности координат центров в пикселах с учетом масштаба видеоизображения переводят в соответствующие разности в метрах, которые в качестве корректирующих поправок используют при последующих выстрелах снарядами на поражение. Этой заключительной операцией обеспечиваются высокие итоговые точность и оперативность определения корректирующих поправок.
В прототипе автоматическое считывание и перевод пиксельных разностей координат в поправки не предусмотрены. Применяется трудоемкая грубая операция ручного измерения (считывания) и расчета с использованием простейшей линейки.
Помимо новых качеств заявляемого способа, определяемых рассмотренными отличительными признаками, признаки 1 и 3 дают следующий важный дополнительный результат.
Системами спутниковой навигации и угловой ориентации совместно с бортовой системой управления и исполнительными органами (винтами) решается задача стабилизации как центра масс мультикоптера в пространстве (над целью на требуемой высоте), так и вокруг центра масс (угловой стабилизации). Примером мультикоптера с такими возможностями по стабилизации являются квадрокоптеры производства компании DJI. Этим обеспечивается необходимая неподвижность фиксируемого видеокамерой изображения участка местности и цели в его центре и, как следствие, постоянная совмещенность первого перекрестия подкамерной точки с целью.
Заявляемое изобретение иллюстрируют следующие графические материалы.
Фиг. 1. Общая схема определения корректирующих поправок. Условно показаны оси X, Y прямоугольной плановой (плоской) системы координат СК-42. Здесь Xц,Yц - заданные координаты цели.
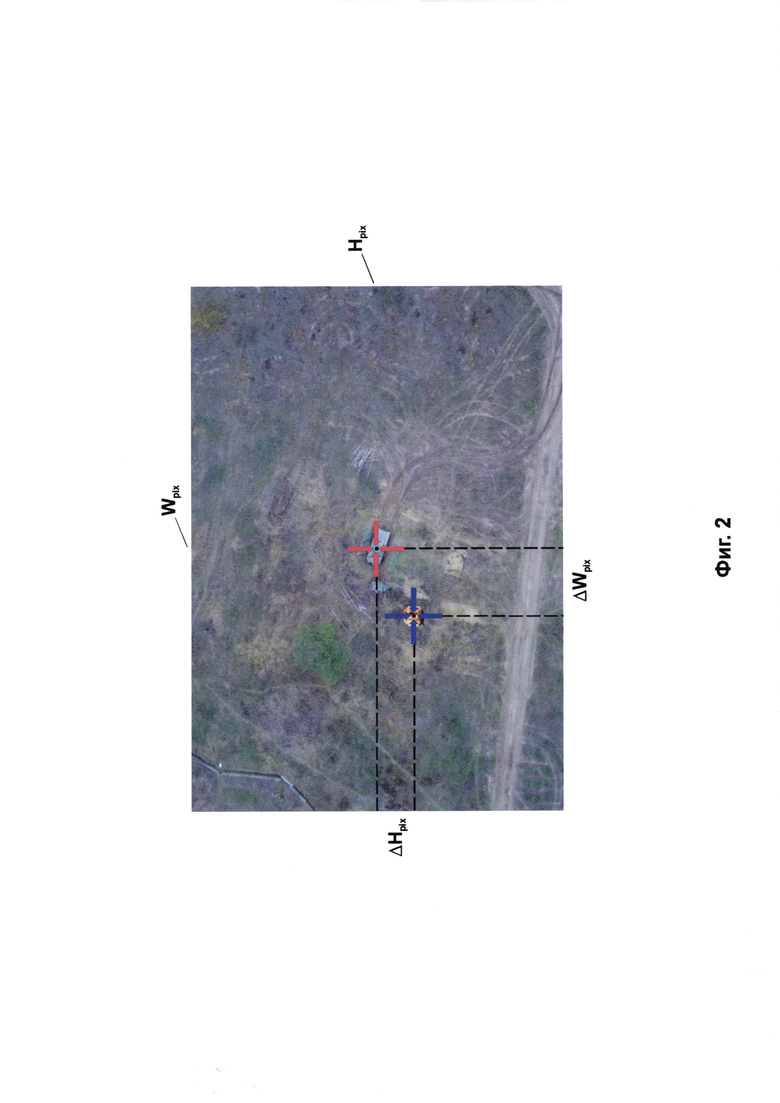
Фиг. 2. Пример совмещения перекрестий с центрами изображений цели и разрыва снаряда. Первое перекрестие подкамерной точки подкрашено красным цветом, второе подвижное - синим.
Математическое обоснование заявляемого способа заключается в следующем.
Длина диагонали фиксируемого видеокамерой прямоугольного участка местности D определяется по формуле (Фиг. 1):
D=2htg(β/2),
где h - высота мультикоптера, β - угловое поле зрения видеокамеры.
По значениям длины диагонали D и известного отношения (Wpix/Hpix) ширины Wpix к высоте Hpix видеокадра в пикселах (Wpix, Hpix задаются заложенным в видеокамеру форматом изображения) вычисляют высоту Н в метрах фиксируемого участка (pix - пиксел):
Делением Н на Нpix рассчитывают масштаб МH изображения по высоте видеокадра:
Поступая аналогично, получают масштаб MW изображения по ширине видеокадра:

Знаменатель  в выражениях для масштабов МН, MW можно условно трактовать как длину диагонали видеокадра в пикселах.
в выражениях для масштабов МН, MW можно условно трактовать как длину диагонали видеокадра в пикселах.
Автоматически считанные с видеокадра разности координат центров изображений цели и разрыва снаряда ΔHpix, ΔWpix (Фиг. 2) в пикселах с учетом масштабов МН, MW (масштабы одинаковы) переводят в соответствующие разности плановых координат ΔХ, ΔY (Фиг. 1) в метрах:
ΔХ=MHΔHpix, ΔY=MWΔWpix,
которые далее используют в качестве корректирующих поправок.
Техническая реализация заявляемого способа не вызывает сложности, поскольку необходимые бортовые и наземные аппаратно-программные средства имеются во всех существующих мультикоптерных комплексах. Дополнительные средства могут быть реализованы в виде специального программного блока, встроенного в программное обеспечение вычислительной системы.
Таким образом, заявляемый способ может быть реализован и обеспечивает повышение точности и оперативности корректировки огня артиллерии с использованием мультикоптера.
Источники информации:
1. lopatov-45.livejournal.com/30166.html. - БПЛА "Орлан-10" и артиллерия.
2. Правила стрельбы и управления огнем артиллерии. Дивизион, батарея, взвод, орудие. Часть 1. - Изд. Михайловской военной артиллерийской академии, 2011, п.п. 88-125.
3. Патент RU 2642554 С1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИСТРЕЛКИ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ КВАДРОКОПТЕРА | 2016 |
|
RU2642554C1 |
| Способ пристрелки цели с использованием специального реактивного снаряда | 2019 |
|
RU2715466C1 |
| Способ выполнения огневых задач с использованием БПЛА в условиях РЭБ и при отсутствии спутниковой навигации | 2024 |
|
RU2828601C1 |
| Способ определения отклонений реальных метеорологических условий от табличных, учитываемых при расчете установок для стрельбы артиллерии | 2019 |
|
RU2700709C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТУРЫ В УСТАНОВКУ ДИСТАНЦИОННОГО ВЗРЫВАТЕЛЯ (ТРУБКИ) | 2004 |
|
RU2253823C1 |
| СПОСОБ БЕССТРЕЛЬБОВОГО ОПРЕДЕЛЕНИЯ И УЧЕТА ОТКЛОНЕНИЯ СНАРЯДОВ ОТ ЦЕЛИ | 2001 |
|
RU2195623C1 |
| Способ стрельбы из артиллерийского вооружения | 2021 |
|
RU2772681C1 |
| СПОСОБ УПРАВЛЕНИЯ КОМПЛЕКСАМИ ВООРУЖЕНИЯ ФОРМИРОВАНИЙ РЕАКТИВНОЙ АРТИЛЛЕРИИ ПРИ СТРЕЛЬБЕ | 2014 |
|
RU2549559C1 |
| СПОСОБ ВЫЯВЛЕНИЯ И КОМПЕНСАЦИИ ОШИБКИ ПРИЦЕЛИВАНИЯ В КОРАБЕЛЬНОМ АРТИЛЛЕРИЙСКОМ КОМПЛЕКСЕ | 2004 |
|
RU2265184C1 |
| СПОСОБ СТРЕЛЬБЫ АРТИЛЛЕРИЙСКИМИ СНАРЯДАМИ С ЗАКРЫТЫХ ОГНЕВЫХ ПОЗИЦИЙ | 2011 |
|
RU2453790C1 |

Изобретение относится к способам ведения воздушной артиллерийской разведки и может быть использовано для корректировки стрельбы артиллерии по целям, ненаблюдаемым с огневых позиций. Для корректировки огня артиллерии используют мультикоптер с бортовой видеокамерой и наземный пульт управления с вычислительной системой, с помощью которых определяют масштаб видеоизображения, учитываемый при расчете корректирующих поправок. При этом с помощью бортовых систем спутниковой навигации и угловой ориентации обеспечивают зависание мультикоптера с видеокамерой в надирном положении на требуемой высоте над целью с заданными прямоугольными плановыми координатами. С помощью программного блока, встраиваемого в программное обеспечение вычислительной системы, по значениям высоты мультикоптера и углового поля зрения видеокамеры вычисляют длину диагонали фиксируемого видеокамерой прямоугольного участка местности, делением длины диагонали участка в метрах на длину диагонали видеокадра в пикселах, определяют масштаб видеоизображения в районе цели, в реальном масштабе времени, совмещают на видеоизображении первое перекрестие подкамерной точки с центром изображения цели и второе подвижное перекрестие с центром изображения разрыва пристрелочного снаряда. Автоматически считываемые с видеокадра разности координат центров в пикселах с учетом масштаба видеоизображения переводят в соответствующие разности в метрах, которые в качестве корректирующих поправок используют при последующих выстрелах снарядами на поражение. Обеспечивается повышение точности и оперативности корректировки огня артиллерии при использовании мультикоптера в условиях стабилизации как центра масс мультикоптера в пространстве (над целью на требуемой высоте), так и угловой стабилизации вокруг центра масс. 2 ил.
Способ корректировки огня артиллерии с использованием мультикоптера, заключающийся в том, что применяют бортовую видеокамеру и наземный пульт управления с вычислительной системой, с помощью которых определяют масштаб видеоизображения, учитываемый при расчете корректирующих поправок, отличающийся тем, что с помощью бортовых систем спутниковой навигации и угловой ориентации обеспечивают зависание мультикоптера с видеокамерой в надирном положении на требуемой высоте над целью с заданными прямоугольными плановыми координатами, с помощью специального программного блока, встраиваемого в программное обеспечение вычислительной системы, по значениям высоты мультикоптера и углового поля зрения видеокамеры вычисляют длину диагонали фиксируемого видеокамерой прямоугольного участка местности, делением длины диагонали участка в метрах на длину диагонали видеокадра в пикселах определяют масштаб видеоизображения в районе цели, в реальном масштабе времени совмещают на видеоизображении первое перекрестие подкамерной точки с центром изображения цели и второе подвижное перекрестие с центром изображения разрыва пристрелочного снаряда, при этом автоматически считываемые с видеокадра разности координат центров в пикселах с учетом масштаба видеоизображения переводят в соответствующие разности в метрах, которые в качестве корректирующих поправок используют при последующих выстрелах снарядами на поражение.
| СПОСОБ ПРИСТРЕЛКИ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ КВАДРОКОПТЕРА | 2016 |
|
RU2642554C1 |
| EP 3447435 A1, 27.02.2019 | |||
| СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2004 |
|
RU2248307C1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |

