Изобретение относится к области регулирующих и управляющих систем, а именно к системам мониторинга параметров роботизированных установок (РУ), сбора данных о их работе и состоянии. Заявляемая система мониторинга параметров РУ, объединяет в единую информационную сеть РУ нескольких производителей, таких как KUKA, ABB, FANUC.
Из патента RU № 2689639 [МПК G05B 19/042, опубл. 28.05.2019г.] известна система мониторинга и контроля промышленной установки. Под промышленной установкой понимают в этом патенте сборочную линии известного типа, например, для конструкций или компонентов автотранспортных средств, которая содержит множество обрабатывающих и/или сборочных станций ST, например, последовательно соединенных вместе, при этом каждая станция ST выполнена с возможностью выполнять определенную операцию. В вышеупомянутых станциях ST предусмотрен один или множество промышленных роботов, предназначенных для выполнения операций. Промышленный робот представляет собой автоматизированный, перепрограммируемый, многофункциональный манипулятор, используемый зачастую в промышленной автоматизации для осуществления производственного процесса. В системе мониторинга и контроля промышленной установки модуль человеко-машинного интерфейса содержит портативный компьютер с беспроводным приемопередатчиком. Упомянутый компьютер запрограммирован на выполнение множества функций, в том числе общего мониторинга промышленной установки, локального мониторинга по меньшей мере одной из упомянутых станций и локального контроля по меньшей мере одной из упомянутых станций. Система содержит средства, обеспечивающие доступ портативного компьютера к коммуникационной сети посредством беспроводного приемопередатчика так, чтобы компьютер мог отправлять команды мониторинга и/или контроля к электронным контролирующим и обрабатывающим модулям. Система содержит множество устройств идентификации, при этом с каждой контролируемой областью связано соответствующее устройство идентификации для распознавания присутствия портативного компьютера в определенной контролируемой области. Система выполняет контроль, если портативный компьютер и определенная станция расположены в одной и той же контролируемой области. К достоинствам системы следует отнести удобство мониторинга промышленной установки, к недостаткам отсутствие у системы возможности мониторинга промышленной установки, собранной из РУ различных производителей.
Общими существенными признаками с заявляемым изобретением, является наличие трех подсистем: подсистемы сбора информации (модуль человеко-машинного интерфейса, сконфигурированный для мониторинга и/или контроля станций (ST)), подсистемы обработки информации (контролирующий и обрабатывающий модуль (PLC) для мониторинга и/или контроля станций (ST)) и подсистемы отображения информации (программируемый терминал типа SCADA диспетчерского управления и сбора данных, обеспечивающий возможность удаленного мониторинга всей сборочной линии), а также коммуникационной сети, соединяющей вместе упомянутые подсистемы.
Задачей заявляемого решения являлось создание системы, позволяющей объединить роботизированные установки различных производителей в единую информационную и управляющую сеть, обладающую возможностью собирать, обрабатывать и отображать информацию, относящуюся к состоянию всех РУ, а также генерировать и отправлять команды контроля в РУ с целью повышения эффективности работы всего оборудования сети, оптимизации процесса производства, снижения общих энергозатрат, сокращения времени простоев.
Технический результат предлагаемого решения, заключается в расширении арсенала средств мониторинга и управления промышленным оборудованием, состоящем из роботизированных установок различных производителей, путем объединения их в единую сеть.
Технический результат достигается тем, что система мониторинга параметров роботизированных установок характеризующаяся наличием трех взаимосвязанных подсистем: подсистемой сбора информации, подсистемой обработки информации и подсистемой отображения информации, а также наличием коммуникационной сети, соединяющей вместе упомянутые подсистемы, включает в состав подсистемы сбора информации минимум два устройства сбора данных, входы каждого из которых по сетевому интерфейсу RS-485 связаны с контроллерами роботизированных установок, а выходы с одним из входов блока сетевой коммуникации, выход которого по сети Ethernet соединен со входом подсистемы обработки информации в виде сервера, выход которой также по сети Ethernet соединен со входом подсистемы отображения информации, при этом в состав устройства сбора данных входят: блок взаимодействия с роботизированной установкой по TCP-протоколу, блок обработки данных, выполненный с возможностью извлечения из TCP-сообщений роботизированной установки информации о версии контроллера, версии прошивки, а также возможностью считывания заданных параметров роботизированной установки в процессе её работы, с возможностью обработки входящих запросов других подсистем, расшифровки и трансляции их в контроллер роботизированной установки, блок формирования HTTP-сообщений в формате JSON; в состав сервера входят: блок хранения и обработки данных, включающий базы метаданных основных параметров роботизированных установок различных производителей, базы данных о пользователях роботизированных установок, блок диагностики ошибок и выдачи уведомлений, блок сбора статистики и формирования отчетов, блок архивирования и хранения данных, блок управления доступом к роботизированным установкам, блок HTTP-сервера для обработки и доставки сообщений в формате JSON; в состав подсистемы отображения информации входят: блок отображения параметров текущего состояния роботизированной установки, блок индикации ошибок в работе роботизированной установки, блок отправки уведомлений по e-mail, блок формирования запросов и отчетов о параметрах работы роботизированной установки за заданный период, блок построения графиков по параметрам работы роботизированной установки, блок хранения архивных данных о параметрах работы роботизированной установки, блок управления доступом к подсистеме отображения информации.
Целесообразно в системе мониторинга параметров роботизированных установок в состав блока хранения и обработки данных подсистемы обработки информации включить базы метаданных основных параметров роботизированных установок производителей: KUKA, ABB, FANUC.
Объединение РУ различных производителей в единую сеть достигается за счет совместной работы устройства сбора данных, содержащего блок обработки данных выполненный с возможностью извлечения из TCP-сообщений роботизированной установки информации о версии контроллера, версии прошивки, считывания заданных параметров роботизированной установки в процессе её работы и сервера, содержащего базы метаданных основных параметров роботизированных установок различных производителей, что обеспечивает возможность сбора данных с контроллеров РУ путём обращения к требуемым ячейкам памяти в требуемом формате.
Повышение эффективности работы оборудования достигается за счет оперативного управления РУ на основе информации о загруженности, текущем техническом состоянии РУ, этапах выполняемых РУ программ.
Снижение общих энергозатрат и оптимизация процесса производства является следствием обработки текущей информации о энергозатратности отдельных РУ, сокращения времени простоев вследствие обработки информации о текущей и суммарной загруженности РУ, своевременном устранении ошибок, возникающих в процессе работы оборудования, по информации о причинах их возникновения и факту исправления.
Изобретение поясняется чертежами, где:
фиг.1 блок-схема заявляемой системы мониторинга параметров РУ;
фиг.2 структура базы данных параметров РУ;
фиг.3 алгоритм выполнения запросов системы мониторинга параметров РУ.
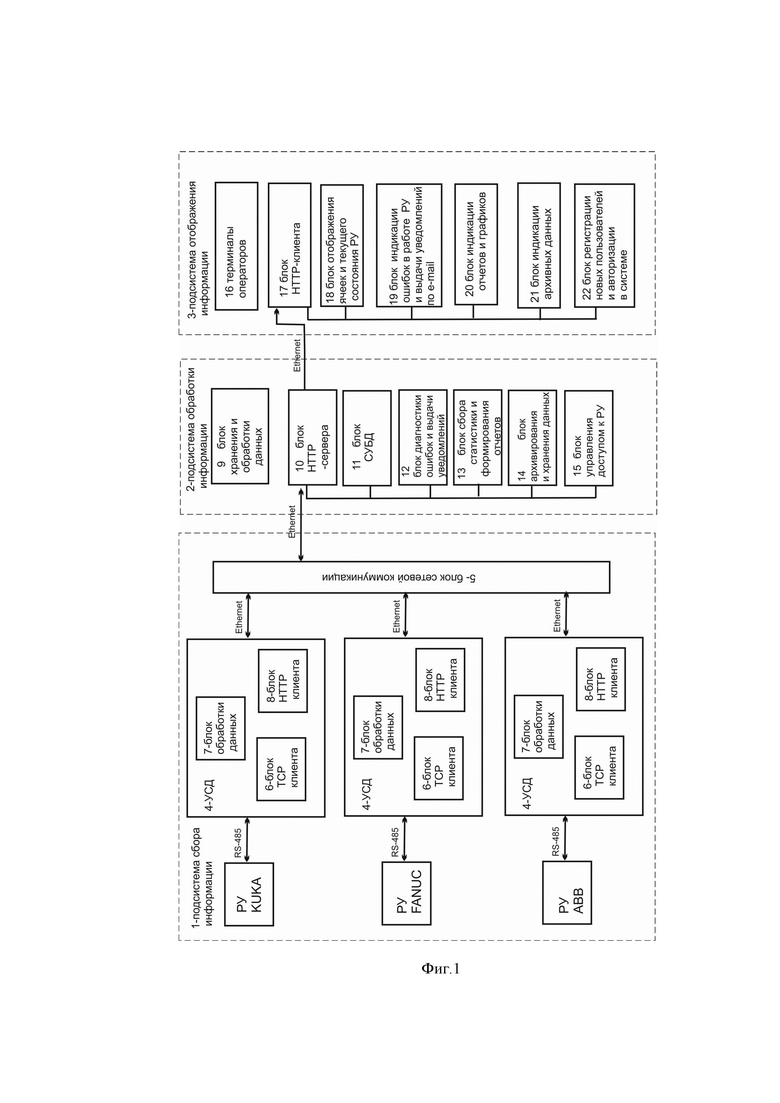
Система мониторинга параметров РУ (Фиг.1) состоит из трех основных подсистем: подсистемы сбора информации 1, подсистемы обработки информации 2, подсистемы отображения информации 3.
Подсистема сбора информации 1 состоит из двух или более устройств сбора данных (УСД) 4, входы которых по сетевому интерфейсу RS-485 связаны с контроллерами РУ различных производителей, например таких, как фирмы KUKA, ABB, FANUC. Выходы каждого из УСД 4 по сетевому интерфейсу Ethernet подключены ко входам блока сетевой коммуникации 5. В состав каждого УСД входят: блок взаимодействия с РУ по TCP–протоколу (блок ТСР-клиента) 6, блок обработки данных 7, блок HTTP-клиента обмена сообщениями в формате JSON (блок HTTP-клиента) 8. С подсистемой сбора информации 1 последовательно по интерфейсу Ethernet связана подсистема обработки информации 2 (сервер). В состав сервера ( блок хранения и обработки данных 9) входят: блок HTTP-сервера для обработки и доставки сообщений в формате JSON 10, блок системы управления базой данных основных параметров РУ различных производителей (блок СУБД) 11, блок диагностики ошибок и выдачи уведомлений 12, блок сбора статистики и формирования отчетов 13, блок архивирования и хранения данных 14, блок управления доступом к РУ 15. Подсистема отображения информации 3 последовательно связана по интерфейсу Ethernet с системой обработки информации 2 и состоит из терминалов операторов 16, на которых происходит отображение интерфейса программного обеспечения системы, блока HTTP-клиента обмена сообщениями в формате JSON (блок HTTP-клиента)17, блока отображения ячеек и текущего состояния РУ 18, блока индикации ошибок в работе РУ и выдачи уведомлений по e-mail 19, блока индикации отчетов и графиков 20, блока индикации архивных данных (значений параметров РУ) 21, блока регистрации новых пользователей и авторизации текущих в системе 22.
Система работает следующим образом.
Роботизированная установка управляется входящим в ее состав контроллером РУ, который осуществляет выполнение загруженных производителем программ и отслеживание основных характеристик и параметров РУ. Контроллер РУ в зависимости от типа может одновременно отслеживать и записывать выполнение до 500 показателей, основными из которых являются значения токов, моментов, напряжений, скорости, энергозатрат. Количество и состав измеряемых параметров определяется фирмой-производителем РУ. Все современные контроллеры РУ имеют сетевые интерфейсы, позволяющие подключать к контроллеру устройства и считывать требуемые параметры. Фирма-производитель, поставляющая РУ на предприятие, предоставляет возможность подключения контроллера РУ к устройствам вывода за счет имеющегося программного интерфейса приложения (API), и предлагает собственное программное обеспечение для мониторинга их работы. Такое программное обеспечение, как правило, имеет ограниченный функционал и работает только с РУ данной фирмы-производителя.
В заявляемой системе при первом подключении УСД 4 к контроллеру РУ происходит идентификация типа РУ блоком HTTP-клиента 17 терминала оператора 16 по форматам, утвержденным производителями РУ, например, KUKA, FANUC, ABB. При этом блоком HTTP-клиента 17 терминала оператора 16 формируется ряд запросов на идентификацию типа установки, которые последовательно через блок HTTP-сервера 10 и блок сетевой коммуникации 5 отправляются в УСД 4. Блок HTTP клиента 8 отправляет информацию на блок обработки данных 7, который трансформирует запросы в TCP-протокол и через блок TCP-клиента отправляет их на контроллер РУ, к которой подключен УСД 4. Запросы последовательно обрабатываются контроллером РУ, который отправляет ответы таким же способом на терминал оператора 16 в блок HTTP-клиента 17. В случае поступления запроса по формату, который не поддерживается подключенной РУ, контроллером РУ выдается соответствующее сообщение. Если запрос поступает в правильном формате, то контроллер РУ отправляет сообщение с наименованием фирмы-производителя РУ, типом, расширением и версией прошивки контроллера, номером и датой запроса. Таким образом происходит идентификация РУ, после чего по аналогичной схеме пользователем системы направляется ряд запросов для настройки параметров сбора данных: наименование параметров, частота сбора, формат предоставления данных. Затем в контроллер РУ загружается программа, РУ начинает её выполнять.
Далее, после определения типа РУ, работа системы происходит следующим образом.
С первичных датчиков системы управления РУ в её контроллер в виде сигналов поступают значения различных параметров, определенных производителем и пользователем. Сигналы обрабатываются и хранятся программным обеспечением (ПО), установленным в контроллер РУ. ПО контроллера РУ осуществляет извлечение значений переменных определенных пользователем с заданными им интервалами времени, формирует унифицированный пакет данных, преобразует сообщение в формат TCP для передачи по интерфейсу RS-485 и с выхода контроллера РУ передает по проводной линии связи по сетевому интерфейсу RS-485 на вход УСД 4, в блок TCP-клиента 6, который принимает пакеты данных в формате TCP и передает в блок обработки данных 7. Блок обработки данных 7 преобразует данные с формата TCP в формат HTTP и шифрует данные в формате SSL по собственному протоколу шифрования. Зашифрованные данные с блока обработки данных 7 поступают на выход УСД 4, в блок HTTP-клиента 8, откуда по проводной линии связи по сетевому интерфейсу Ethernet поступают на вход блока сетевой коммуникации 5, который, в свою очередь, распределяет пакеты, полученные от разных УСД по очереди и отправляет с выхода по проводной линии связи по сетевому интерфейсу Ethernet на вход блока хранения и обработки данных 9, в блок HTTP-сервера 10. Блок HTTP-сервера 10 принимает пакеты данных и отправляет их в блок СУБД 11, который записывает и хранит значения параметров системы. С заданной периодичностью данные с блока СУБД 11 через Блок HTTP-сервера 10 (выход блока хранения и обработки данных 9) по проводной линии связи по сетевому интерфейсу Ethernet передаются в блок HTTP-клиента 17 (на вход терминала оператора 16). Блок HTTP-клиента 17 системы отображения информации 3 дешифрует данные и отображает их на терминале оператора 16 с помощью бока отображения ячеек и текущего состояния РУ 18. При появлении ошибок в процессе выполнения программы РУ, блок диагностики ошибок и выдачи уведомлений 12 диагностирует тип ошибки и через блок HTTP-сервера 10 отправляет уведомление с кодом ошибки на блок HTTP-клиента 17, который отображает ошибки на терминале оператора 16 или отправляет заинтересованному лицу на e-mail с помощью блока индикации ошибок и уведомления по e-mail 19. Система работает также в обратном направлении, т.е. при выполнении запроса значения параметра из терминала оператора 16, запрос по указанной схеме доходит до контроллера РУ либо до одного из блоков системы обработки информации, если данные уже известны и возвращается с требуемым значением. Так, по вышеуказанной схеме пользователем системы с помощью терминала оператора 16 отправляет запрос на формирование отчета по требуемым параметрам (например, за день, неделю, месяц, квартал, год и т.д.), запрос обрабатывается блоком сбора статистики и формирования отчетов 13, возвращается на терминал оператора 16 и отображается с помощью блока индикации отчетов и графиков 20. При отправке запроса на получение данных из архива или внесение данных в архив пользователем системы, блок архивирования и хранения данных 14 выполняет запрос и возвращает ответ на терминал оператора 16 и отображает с помощью блока индикации архивных данных 21. Таким же образом для регистрации новых пользователей или авторизации текущего, пользователем отправляется соответствующий запрос в блок управления доступом 15, который пересылает запрос в Блок СУБД 11, получает от него данные и отображает процессы на терминал оператора 16 с помощью блока регистрации новых пользователей или авторизации текущих 22.
Отличительной особенностью заявляемой системы является программное обеспечение устанавливаемое в УСД 4 (блок обработки данных 7). Перечень классов программного обеспечения (ПО) УСД, обеспечивающего взаимодействие ПО контроллера РУ с ПО УСД при использовании РУ различных производителей, например, таких как KUKA, FANUC, ABB, содержит:
1) Класс JSON, который содержит методы для формирования текста сообщений в формате JSON
2) Классы KRC4_JSON, Sunrise_JSON, Fanuc_JSON, ABB_JSON, предназначенные для формирования текста сообщений в формате JSON, содержащих информацию о системных переменных в зависимости от производителя РУ и/или типа контроллера РУ
3) Класс ClientHTTP, отвечающий за взаимодействие с Сервером по протоколу HTTP
4) Класс RobotHTTPClient, предназначенный для обмена данными с Сервером по протоколу HTTP, представленными в требуемом формате
5) Класс Robot, содержащий в себе необходимые методы для получения данных по протоколу TCP от блока TCP-сервера контроллера РУ, методы для взаимодействия с Сервером посредством представителя (объекта) класса RobotHTTPClient и остальные необходимые поля
6) Классы KRC4, Sunrise, Fanuc, ABB, являющиеся наследниками класса Robot и предназначенные для обмена данными непосредственно между РУ с соответствующим контроллером и сервером.
Контроллер РУ записывает и хранит информацию о значениях параметров в собственной памяти. Значение каждого параметра хранится в отдельном регистре (ячейке памяти). В зависимости от типа контроллера один и тот же параметр может храниться в разных регистрах, вследствие чего отличается формат запроса. После идентификации марки РУ и типа его контроллера блок обработки данных 7 (собственное ПО УСД) в зависимости от типа РУ обращается к нужному регистру через ПО контроллера в формате установленного типа. Получив от контроллера РУ данные в виде унифицированного пакета, блок обработки данных 7 УСД шифрует пакет и отправляет на сервер. Каждый пакет имеет ключ, который содержит информацию о марке РУ, типе контроллера, версии прошивки контроллера. Таким образом, блок обработки данных УСД является универсальным и позволяет работать РУ различных производителей. На текущий момент возможна работа со всеми контроллерами крупнейших производителей РУ и систем управления KUKA, FANUC, ABB.
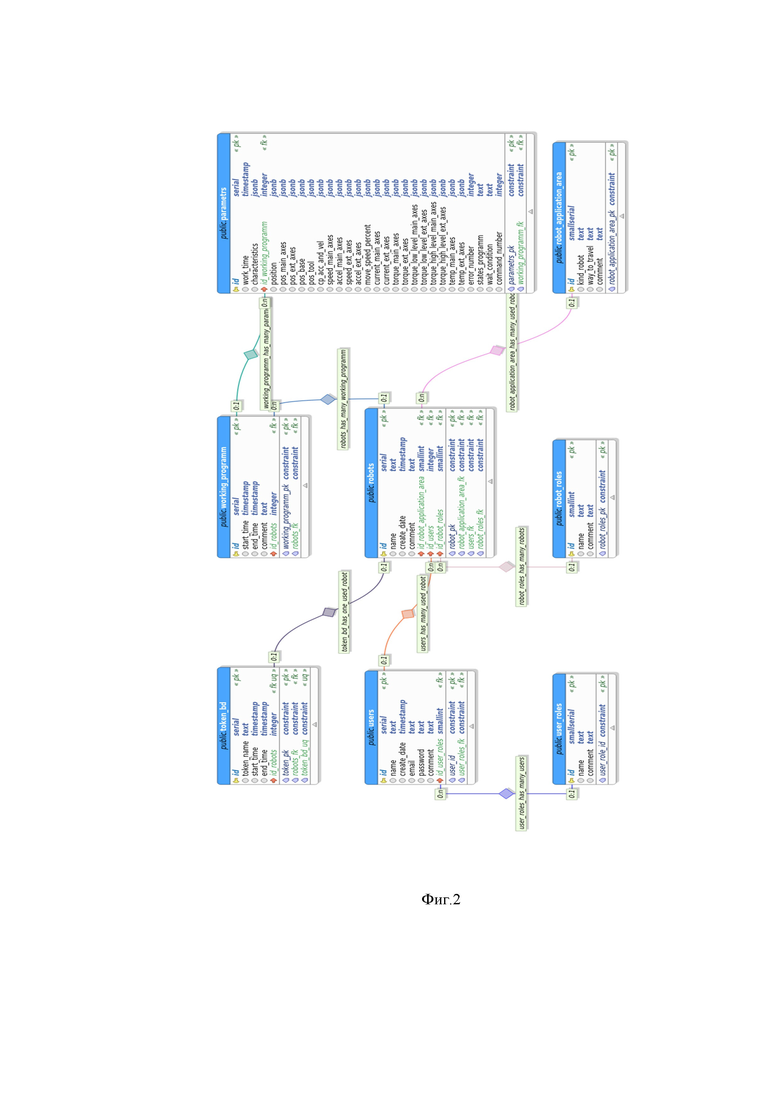
Структура базы данных параметров РУ (Блок СУБД 11) и алгоритм выполнения запросов системы мониторинга параметров РУ приведены на Фиг.2 и Фиг.3 соответственно.
Блок СУБД 11 состоит из следующих таблиц: users, robots, robot_roles, robot_application_area, token_bd, working_programm. Ключевая информация о пользователях системы хранится в таблице users. В ней содержится данные пользователя: имя (users.name), дата создания (users.create_date), почтовый ящик (users.email), пароль (users.password) и комментарии (users.comment). Так же, для каждого пользователя хранится информация о его правах пользователя (таблица user_roles через id_user_roles).
Основная информация о РУ различных производителей хранится в таблице robots. В ней содержится информация о названии РУ (robots.name), дата создания (robots.create_date) и комментарии (robots.comment).
В блоке СУБД 11 также содержится следующая информация:
1. таблица robot_roles содержит информацию о ролях РУ (robot_roles.name), что может использоваться при групповом управлении, то есть при выполнении одной программы несколькими РУ, и комментарии (robot_roles.comment);
2. таблица robot_application_area содержит информацию об области применения РУ, а именно к какому типу относиться РУ (robot_application_area.kind_robot), способ его передвижения (robot_application_area.wat_to_travel) комментарии (robot_application_area.comment). Данная таблица также содержит другие характеристики, например, фирма изготовитель или место установки.
3. таблица token_bd содержит информацию о токенах - программно-генерируемых криптографических ключей сложной структуры, используемых в качестве ключа доступа, для каждого интегрированного в систему РУ. В таблице имеется информация непосредственно о самом токене (token_bd.token_name), дата начала действия токена (token_bd.start_time) и время окончания его функционирования (token_bd.end_time);
4. таблица working_programm содержит информацию о начале выполнения конкретным РУ программы (working_programm.start_time) и об окончании (working_programm.end_time), при необходимости можно оставлять комментарии (working_programm.comment). Данная таблица связана с таблицей parametrs в которой хранятся данные о параметрах РУ во время выполнения программы. Например в parametrs.work_time хранится общее время работы РУ, в parametrs.characteristics хранятся все параметры приходящие с РУ, остальные значения таблицы хранят конкретную информацию о функционировании РУ.
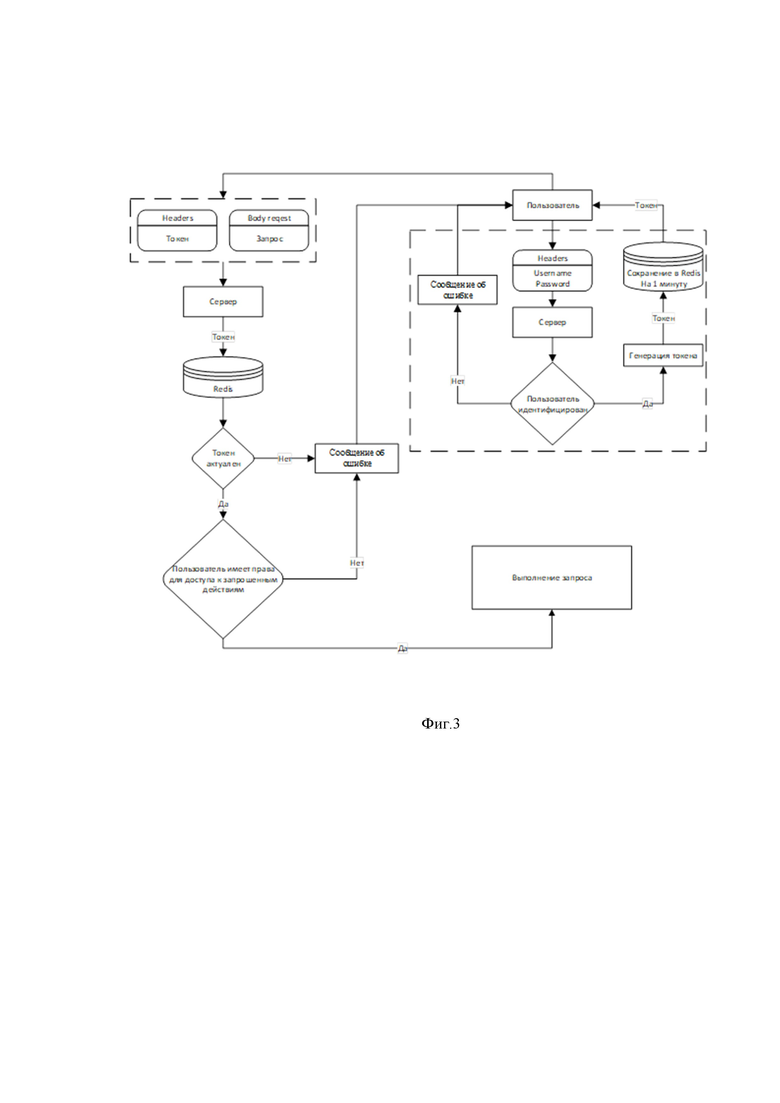
Доступ к базе данных реализован только для зарегистрированных пользователей системы. Для авторизации необходимо сделать запрос, содержащий имя пользователя (username) и пароль (password). Сервер обращается к базе данных и ищет соответствие данных параметров в таблице publuc.users. В случае нахождения соответствия, пользователю выдается временный идентификатор — token (токен), позволяющий обращаться к другим функциям системы. В случае если пользователь не существует или допущена ошибка при вводе пароля вернется сообщение {'error': 'unauthorized access'}
Для защиты системы от несанкционированного доступа token функционирует только в течении 1 минуты и затем удаляется. Для дальнейших действий необходимо повторно получать токен. Для увеличения быстродействия токен для пользователя хранится не в основной БД, а в сетевом журналируемом хранилище данных Redis (Remote dictionary server, распространенная база данных, размещаемая в оперативной памяти, ориентированная на достижение максимальной производительности), где ключом является идентификатор пользователя, а значением непосредственно токен.
Для доступа к другим функциям системы необходимо отправлять полученный токен в заголовке запроса. Сервер проверит наличие токен в Redis, и либо получит значение ID пользователя, либо выдаст сообщение, что пользователь не авторизован {"error": "unauthorized access"}. По полученному ID пользователя выполнит запрос в БД для определения прав доступа в таблицу public.user_roles.
Для пользователей существуют всего два вида прав:
• администратор (admin), с максимальными правами, позволяющими редактировать БД;
• пользователь (user), может только получать информацию о функционировании РУ и не может вносить изменения в БД.
Доступ к функциям доступным для РУ, например, запись параметров функционирования в БД тоже проходит через токен (robot_token) который передается в headers. Однако токен для РУ создается на один год и храниться в БД в таблице public.token_bd.
В зависимости от прав доступа пользователи могут выполнить следующие запросы (таблица 1).
Пример практической реализации системы.
В лаборатории промышленной робототехники Томского политехнического университета в единую сеть были объединены РУ производителей KUKA 40PA, контроллер KR C4, расширение KUKA Ethernet KRL, версия 2.2; FANUC LrMate 200id, контроллер R30iB Mate расширение, FANUC, версия V.8.30P/40; ABB IRB1200-7/0.7, контроллер irc 5, версия 5.6.
При первом подключении УСД 4 к контроллерам РУ для идентификации типа РУ блоком HTTP-клиента 17 сформировался ряд запросов, которые последовательно через блок HTTP-сервера 10 и блок сетевой коммуникации 5 отправлены в УСД 4. Блок HTTP клиента 8 отправил информацию на блок обработки данных 7, который трансформировал запросы в TCP-протокол и через блок TCP-клиента отправил их на контроллеры РУ, к которым подключен УСД 4. Запросы были последовательно обработаны контроллером РУ, который отправил ответы таким же способом на терминал оператора 16. В РУ KUKA верный запрос пришел после третей попытки, в РУ FANUC после первой и в РУ ABB после второй. При поступлении запросов в не правильном формате, от контроллеров РУ приходили соответствующие сообщения.
После поступления правильных запросов, контроллеры РУ отправили сообщения с наименованием фирмы-производителя РУ, типом, расширением и версией прошивки контроллера, номером и датой запроса. Таким образом осуществилась идентификация РУ, после чего пользователь РУ по аналогичной схеме направил ряд запросов для настройки параметров сбора данных: наименование параметров, частота сбора, формат предоставления данных. Затем в контроллеры РУ операторами загрузились программы по перемещению объекта из одной точки в другую с использованием захватов фирмы SHUNK. РУ начали выполнять программы.
Далее работа системы происходила следующим образом.
ПО контроллеров РУ осуществляло извлечение значений переменных определенных пользователем при настройке: сила тока на осях (А), моменты на осях (М), текущие координаты осей (X,Y,Z), энергопотребление по осям (Вт) с заданными интервалами времени: 1 раз в секунду. ПО контроллера РУ сформировало унифицированные пакеты данных, преобразовало пакеты в формат TCP для передачи по интерфейсу RS-485 и с выходов контроллеров РУ передало по проводной линии связи по сетевому интерфейсу RS-485 на входы УСД 4, в блоки TCP-клиента 6, которые приняли пакеты данных в формате TCP и передали в блоки обработки данных 7. Блоки обработки данных 7 преобразовали данные с формата TCP в формат HTTP и зашифровали данные в формате SSL по собственному протоколу шифрования. Зашифрованные данные с блоков обработки данных 7 поступили на выходы УСД 4, в блоки HTTP-клиентов 8, откуда по проводной линии связи по сетевому интерфейсу Ethernet поступили на входы блока сетевой коммуникации 5, который, в свою очередь, распределили пакеты, полученные от УСД по очереди и отправил с выхода по проводной линии связи по сетевому интерфейсу Ethernet на вход блока хранения и обработки данных 9, в блок HTTP-сервера 10. Блок HTTP-сервера 10 принял пакеты данных и отправил их в блок СУБД 11, который записал значения требуемых параметров. С периодичностью в 1 секунду данные с блока СУБД 11 через Блок HTTP-сервера 10 (выход блока хранения и обработки данных 9) по проводной линии связи по сетевому интерфейсу Ethernet передавались в блок HTTP-клиента 17 (на вход терминала оператора 16). Блок HTTP-клиента 17 системы отображения информации 3 дешифровал данные и отобразил значения параметров на терминале оператора 16 с помощью блока отображения ячеек и текущего состояния РУ 18.
Для авторизации пользователя системы, с помощью блока 22 регистрации новых пользователей или авторизации текущих пользователем были заполнены требуемые поля с данными (почта, пароль) и запрос был отправлен в Блок СУБД 11 для проверки данных, после чего ответ передан в блок управления доступом 15, который открыл доступ пользователю к программе.
Пользователем системы с помощью терминала оператора 16 отправился запрос на формирование отчета по суточном суммарном энергопотреблении всеми РУ. Запрос обработался блоком сбора статистики и формирования отчетов 13, который обратился в Блок СУБД 11, получил данные по энергопотреблению всеми приводами РУ за сутки на текущий момент, посчитал с помощью вшитых формул значений и отобразил его на терминале оператора 16 в блоке индикации отчетов и графиков 20. Отчетов на получение архивных данных не отправлялось. При выполнении программ РУ ошибки не появлялись.
Внедрение заявляемой системы на предприятии позволит проводить оценку эффективности загрузки оборудования за счет получения актуальной информации о текущем техническом состоянии роботизированных устаовок и выполняемых ими программах, о энергозатратности отдельных и комплексных РУ, о суммарной загруженности и простоях отдельных и комплексных РУ, об ошибках, возникающих в процессе работы оборудования с информацией о причинах их возникновения и факте исправления.
Заявляемая система мониторинга параметров РУ позволяет осуществлять мониторинг и анализ большого количество необходимых оператору параметров роботизированных установок различных производителей (от 30 до 253), хранение их значений и формирование отчетов.
Таблица 1. Выполняемые запросы и права доступа
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНИТОРИНГ СЕТИ И ИДЕНТИФИКАЦИЯ АБОНЕНТА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ С ПОМОЩЬЮ УСТРОЙСТВА, СРАБАТЫВАЮЩЕГО ПО ТРЕБОВАНИЮ | 2013 |
|
RU2585971C1 |
| Способ телемеханического контроля и управления удаленными объектами | 2016 |
|
RU2642365C1 |
| СИСТЕМА И СПОСОБ, ОБЕСПЕЧИВАЮЩИЕ РАСПРЕДЕЛЕННУЮ АРХИТЕКТУРУ СВАРКИ | 2002 |
|
RU2284885C2 |
| АВТОМАТИЗИРОВАННАЯ ОПЕРАЦИОННО-ИНФОРМАЦИОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДГОТОВКИ И ПРОВЕДЕНИЯ ГОЛОСОВАНИЯ | 2005 |
|
RU2303816C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОНИТОРИНГА И КОНТРОЛЯ ПРОМЫШЛЕННОЙ БЕЗОПАСНОСТИ ГИДРОТЕХНИЧЕСКИХ СООРУЖЕНИЙ | 2021 |
|
RU2772447C1 |
| Система контроля жизненного цикла объекта и его инфраструктуры (варианты) | 2019 |
|
RU2755146C2 |
| Система и способ настройки систем безопасности при DDoS-атаке | 2017 |
|
RU2659735C1 |
| Система и способ определения DDoS-атак при некорректной работе сервисов сервера | 2017 |
|
RU2665919C1 |
| Система и способ определения DDoS-атак | 2017 |
|
RU2676021C1 |
| СИСТЕМА ПРОГРАММНО-АППАРАТНЫХ СРЕДСТВ АГРЕГИРОВАНИЯ ВХОДНЫХ ПОТОКОВ ИНФОРМАЦИИ О ВОЗДУШНОЙ ОБСТАНОВКЕ И ЕЕ ОБРАБОТКИ В СИСТЕМАХ УПРАВЛЕНИЯ РЕАЛЬНОГО МАСШТАБА ВРЕМЕНИ | 2013 |
|
RU2566944C2 |
Изобретение относится к управляющим и регулирующим системам. Система мониторинга параметров роботизированных установок содержит объединенные сетью подсистему сбора информации, подсистему обработки информации и подсистему отображения информации. В подсистему сбора информации входят устройства сбора данных, а в подсистему обработки информации - блок хранения и обработки данных, блок диагностики ошибок и выдачи уведомлений, блок сбора статистики и формирования отчетов, блок архивирования и хранения данных, блок управления доступом и блок HTTP-сервера для обработки и доставки сообщений. В подсистему отображения информации входит блок отображения параметров текущего состояния, блок индикации ошибок в работе, блок отправки уведомлений, блок формирования запросов и отчетов о параметрах работы за заданный период, блок построения графиков по параметрам работы, блок хранения архивных данных о параметрах работы и блок управления доступом к подсистеме отображения информации. Расширяется арсенал средств мониторинга. 1 з.п. ф-лы, 3 ил., 1 табл.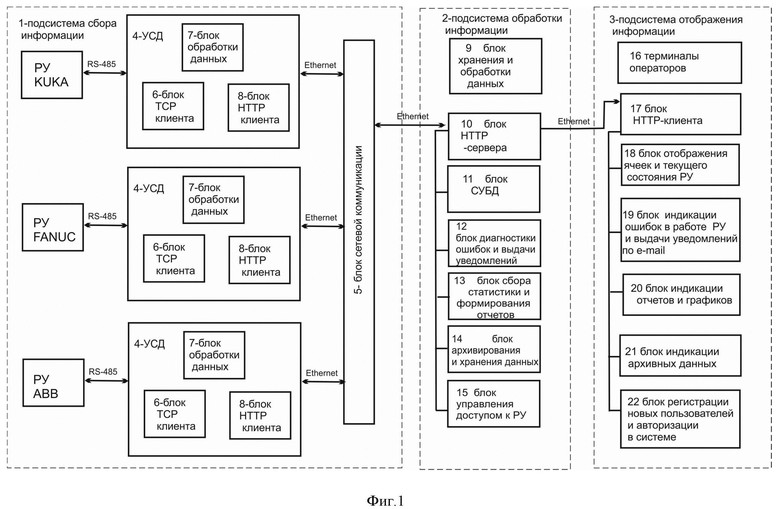
1. Система мониторинга параметров роботизированных установок (РУ) характеризующаяся наличием трех взаимосвязанных подсистем: подсистемы сбора информации, подсистемы обработки информации и подсистемы отображения информации, а также коммуникационной сети, соединяющей вместе упомянутые подсистемы, отличающаяся тем, что в подсистему сбора информации входит минимум два устройства сбора данных, входы каждого из которых по сетевому интерфейсу RS-485 связаны с контроллерами РУ, а выходы с одним из входов блока сетевой коммуникации, выход которого по сети Ethernet соединен со входом подсистемы обработки информации в виде сервера, выход которой по сети Ethernet соединен со входом подсистемы отображения информации, при этом в состав устройства сбора данных входят: блок взаимодействия с РУ по TCP – протоколу, блок обработки данных, выполненный с возможностью извлечения из TCP-сообщений РУ информации о версии контроллера, версии прошивки, а также с возможностью считывания заданных параметров РУ в процессе её работы, обработки входящих запросов других подсистем, расшифровки и трансляции их в контроллер РУ, блок формирования HTTP-сообщений в формате JSON; в состав сервера входят: блок хранения и обработки данных, включающий базы метаданных основных параметров РУ различных производителей, базы данных о пользователях РУ, блок диагностики ошибок и выдачи уведомлений, блок сбора статистики и формирования отчетов, блок архивирования и хранения данных, блок управления доступом к РУ, блок HTTP-сервера для обработки и доставки сообщений в формате JSON; в состав подсистемы отображения информации входят: блок отображения параметров текущего состояния РУ, блок индикации ошибок в работе РУ, блок отправки уведомлений по e-mail, блок формирования запросов и отчетов о параметрах работы РУ за заданный период, блок построения графиков по параметрам работы РУ, блок хранения архивных данных о параметрах работы РУ, блок управления доступом к подсистеме отображения информации.
2. Система мониторинга параметров РУ по п.1, отличающаяся тем, что в состав блока хранения и обработки данных подсистемы обработки информации входят базы метаданных основных параметров РУ производителей KUKA, ABB, FANUC.
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ТЕХНОЛОГИЧЕСКИХ ОБЪЕКТОВ (МОНИТОРИНГ СОСТОЯНИЯ) И АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2003 |
|
RU2260851C2 |
| 0 |
|
SU180856A1 | |
| Система и способ непрерывного мониторинга состояния контактной сети рельсового транспорта | 2018 |
|
RU2701887C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |
| КОНТРОЛИРУЮЩАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ТЕПЛОВОЙ ОБРАБОТКИ | 2013 |
|
RU2653733C2 |

