Область техники
Различные варианты осуществления изобретения, в общем, относятся к считыванию показаний датчиков. Различные варианты осуществления изобретения, в частности, относятся к верификации данных датчиков для датчиков на основе шумового сигнала.
Уровень техники
Датчики используются для того, чтобы измерять различные физические наблюдаемые величины, например, температуру, давление, расход, напряжение, ток, мощность, фазу, энергию и т.д. Ассоциированное значение измерения может передаваться в модуль управления с использованием сигнала датчика. Сигнал датчика служит признаком одного или более значений измерения. Сигнал датчика может быть аналоговым или цифровым. Чтобы передавать сигнал датчика, может использоваться сигнальная линия. Сигнальная линия может быть проводной или беспроводной.
Возникает риск повреждения, потерь данных и т.д., если сигнал датчика манипулируется. Например, в связи с автоматизированным изготовлением, имеется потребность в том, чтобы исключать такие векторы атаки на основе манипулирования сигналами датчиков. Следовательно, для реализации надежной работы системы на основе сигнала датчика, имеется потребность в защите сигнала датчика от манипулирования. Например, известны упоминаемые технологии, в которых кодированные в цифровой форме сигналы датчиков защищены посредством криптографических технологий. Такие технологии не являются легко применимыми к аналоговым сигналам датчиков.
"Sensor-Authentisierung anhand eines Rauschsignals" Journal Technik Up2date 2012 # 19, стр. 13-14, ISBN: 978-3-942905-45-9; номер тома: 99, 17.09.2012 раскрывает проверку сигнала датчика на основе шумового сигнала.
US 2005/0213755 A1 раскрывает наблюдение аналогового сигнала, ассоциированного со связью из цифрового устройства, и предоставление защитного признака на основе охарактеризования цифрового устройства, по меньшей мере, частично на основе аналоговой системы. Защитный признак может представлять собой признак обеспечения безопасности для обнаружения проникновений.
Formby, David и др. "Who's in Control of Your Control System? Device Fingerprinting for Cyber-Physical Systems", NDSS 2016, раскрывает проверку цифрового отпечатка устройства для промышленных устройств и сетей электроснабжения. Физическое влияние актуатора на сеть электроснабжения обнаруживается и анализируется.
Gerdes, Ryan M. и др. "Device Identification via Analog Signal Fingerprinting: A Matched Filter Approach", NDSS 2006, раскрывает идентификацию сетевого устройства для цифровой связи на основе его свойств аналогового сигнала.
Такие упоминаемые технологии сталкиваются с определенными ограничениями и недостатками. Например, согласно таким упоминаемым реализациям, аппаратные средства могут требоваться в модуле управления и/или датчиках для того, чтобы реализовывать функциональность верификации. Это может усложнять систему и может ограничивать способность модернизировать функциональность верификации. Дополнительно, гибкость использования функциональности верификации в различных вариантах использования может быть ограничена.
Сущность изобретения
Следовательно, имеется потребность в усовершенствованных технологиях считывания показаний датчиков, включающих в себя функциональность верификации. В частности, имеется потребность в технологиях, которые преодолевают или уменьшают, по меньшей мере, некоторые вышеобозначенные ограничения или недостатки.
Эта потребность удовлетворяется посредством признаков независимых пунктов формулы изобретения. Признаки зависимых пунктов формулы изобретения задают варианты осуществления.
Способ включает в себя установление шумового сигнала. Шумовой сигнал находится на сигнальной линии датчика. Способ также включает в себя выполнение анализа шумового сигнала. Способ также включает в себя передачу контрольных данных, указывающих результат анализа.
Компьютерный программный продукт или компьютерная программа включает в себя программный код. Программный код может выполняться посредством схемы управления. Выполнение программного кода инструктирует схеме управления осуществлять способ, который включает в себя установление шумового сигнала. Шумовой сигнал находится на сигнальной линии датчика. Способ также включает в себя выполнение анализа шумового сигнала. Способ также включает в себя передачу контрольных данных, указывающих результат анализа.
Например, контрольные данные могут передаваться в модуль управления. Модуль управления может быть выполнен с возможностью обрабатывать сигнал датчика, предоставленный посредством датчика на сигнальной линии . Это может упрощать принятие соответствующих мер противодействия в модуле управления.
Альтернативно или дополнительно, контрольные данные могут передаваться на сервер внутренней интерфейсной системы, например, через Интернет. Это может упрощать принятие глобальных мер противодействия, например, добавление модифицированного датчика или добавление системы в черный список и т.д.
Например, способ может осуществляться посредством модуля анализа, например, посредством схемы управления модуля анализа. Модуль анализа может быть физически различным или удаленным от модуля управления. В других примерах, модуль анализа может совместно размещаться с модулем управления.
Передача контрольных данных может реализовываться на линии передачи управляющих служебных сигналов, устанавливаемой, например, между модулем управления и модулем анализа. Линия передачи управляющих служебных сигналов может реализовываться с использованием беспроводной связи и/или стационарной проводной связи.
Посредством передачи контрольных данных, указывающих результат анализа, появляется возможность отдельно реализовывать анализ шумового сигнала и обработку сигнала датчика, например, с использованием модуля управления и модуля анализа. Это помогает модернизировать такую функциональность верификации. Может не требоваться модифицировать модуль управления.
Шумовой сигнал может отличаться от сигнала датчика. Например, наложенный сигнал может включать в себя как шумовой сигнал, так и сигнал датчика. Наложенный сигнал может присутствовать на сигнальной линии . Например, шумовой сигнал может уменьшать отношение "сигнал-шум" сигнала датчика. Например, шумовой сигнал может занимать спектр, отличающийся от, перекрывающийся с или совпадающий с сигналом датчика.
Шумовой сигнал может быть, по меньшей мере, частично случайным или псевдослучайным. Шумовой сигнал может формироваться из взаимодействия окружения между датчиком и окружением датчика. Шумовой сигнал может формироваться с использованием формирователя сигналов. Например, белый шумовой сигнал или шумовой сигнал с расширенным спектром могут использоваться, который включает в себя распределенные спектральные компоненты. Шумовой сигнал также может упоминаться как цифровой отпечаток целостности сигнала датчика. Это может обусловлено тем, что верификация сигнала датчика становится возможной на основе шумового сигнала, т.е. проверки того, произошло или нет манипулирование сигналом датчика, например, вследствие манипулирования датчиком и/или сигнальной линией .
Контрольные данные могут включать в себя криптографический ключ. Криптографический ключ может требоваться для обработки сигнала датчика.
Согласно различным примерам, возможны различные технологии установления шумового сигнала. В первом примере, установление шумового сигнала включает в себя обнаружение шумового сигнала с использованием считывания показаний, такого как индуктивное считывание показаний сигнальной линии . Например, индуктивное считывание показаний может включать в себя обнаружение паразитного электромагнитного поля сигнальной линии . Для этого, индуктивные обмотки могут размещаться в непосредственной близости сигнальной линии , с тем чтобы обнаруживать электромагнитное паразитное поле. С другой стороны, это упрощает модернизацию, поскольку может не требоваться модифицировать целостность сигнальной линии ; наоборот, внешнее считывание показаний становится возможным.
Альтернативно или дополнительно, в дополнительном примере, установление шумового сигнала включает в себя прием управляющих данных, кодирующих в цифровой форме шумовой сигнал. Например, управляющие данные могут приниматься из модуля управления. Например, модуль управления может быть выполнен с возможностью отделять шумовой сигнал от сигнала датчика, на основе наложенного сигнала. Это может реализовываться в связи с подавлением шумов. Затем модуль управления может кодировать в цифровой форме шумовой сигнал, например, с использованием многобитового индикатора, указывающего шумовой сигнал. В таком сценарии, аппаратная реализация может упрощаться, поскольку может не требоваться предоставлять отдельные аппаратные средства для считывания показаний шумового сигнала. Наоборот, аналого-цифровой преобразователь модуля управления может многократно использоваться как для преобразования сигнала датчика, так и для преобразования шумового сигнала в цифровую область.
Способ дополнительно может включать в себя выполнение классификации результата анализа шумового сигнала относительно множества категорий. После этого, контрольные данные могут служить признаком классификации. Соответствующая таблица кодирования с использованием предварительно заданного преобразования может использоваться для контрольных данных.
Такие технологии основаны на таких выявленных сведениях, что результат анализа может предоставляться на различных уровнях детализации. Например, в простом сценарии, контрольные данные могут служить признаком того, служит или нет результат анализа признаком модификации датчика и/или сигнальной линии , т.е. того, служит или нет результат анализа признаком нарушения целостности. Это может реализовываться с помощью 1-битового флага "Да/Нет". Уровень детализации является низким. В более сложных сценариях, может предоставляться большая глубина информации на более высоком уровне детализации. Здесь, представляется возможным, что результат анализа служит признаком дополнительной информации, ассоциированной с функциональностью верификации сигнала датчика за рамками простого индикатора относительно того, произошла или не произошла модификация. В таком сценарии, может быть полезным выполнять классификацию результата анализа относительно множества категорий, чтобы за счет этого упрощать принятие соответствующей меры противодействия в модуле управления. Различные меры противодействия могут быть соответствующими в зависимости от типа модификации. Например, они могут быть менее серьезными и более серьезными категориями, которые могут требовать осуществления различных действий в модуле управления. Примерные категории включают в себя: манипулирование датчиком; манипулирование сигнальной линией ; манипулирование с низкой степенью серьезности; манипулирование с высокой степенью серьезности; сбой датчика; и сбой сигнальной линии .
В дополнительных примерах, классификация может служить признаком различных видов и типа манипулирования. Например, манипулирование микропрограммным обеспечением, вызовами функций, адресами считывания из запоминающего устройства или адресами записи в запоминающее устройство, протоколом связи или интерфейсом связи и т.д. может охватываться посредством соответствующих категорий, на основе которых работает классификация результата анализа.
Здесь, может быть возможным отличать между внешним манипулированием с одной стороны и внутренним сбоем с другой стороны. Может быть возможным определять серьезность сбоя, например, с точки зрения автономных сбоев или цепных сбоев. Это помогает принимать специализированные меры противодействия.
Согласно некоторым примерам, могут приниматься конфигурационные данные, указывающие конфигурацию формирователя сигналов. Формирование сигналов может быть выполнено с возможностью формировать шумовой сигнал. Затем установление шумового сигнала и/или выполнение анализа может быть основано на конфигурационных данных.
Посредством таких технологий, может достигаться синхронизация между формирователем сигналов для формирования шумового сигнала с одной стороны и модулем анализа для выполнения анализа шумового сигнала. Это может помогать различать шумовой сигнал из сигнала датчика. Например, шумовой сигнал может надежно устанавливаться, например, посредством отделения шумового сигнала от наложенного сигнала, включающего в себя как шумовой сигнал, так и сигнал датчика.
Здесь, представляется возможным, что конфигурация формирователя сигналов включает в себя уровень сигнала для шумового сигнала. Альтернативно или дополнительно, конфигурация может включать в себя частотный спектр шумового сигнала. Это может помогать индивидуально адаптировать анализ к конкретным свойствам сигнала, ожидаемым для шумового сигнала.
В некоторых примерах, анализ может включать в себя сравнение шумового сигнала с предварительно заданным опорным сигналом. Например, корреляция во временной области может реализовываться между шумовым сигналом и опорным сигналом.
Альтернативно или дополнительно, анализ может включать в себя обнаружение аномалий. Он может заключать в себе технологии машинного обучения. Например, алгоритм классификации может обучаться с использованием технологий машинного обучения. Затем, на основе этого алгоритма классификации, могут обнаруживаться аномалии, которые служат признаком модификации датчика и/или сигнальной линии .
Альтернативно или дополнительно, анализ может включать в себя спектральный анализ. Здесь, например, плотность спектральной мощности может определяться для различных спектральных компонентов наложенного сигнала, включающего в себя как шумовой сигнал, так и сигнал датчика. После этого, на основе спектральной плотности мощности, может определяться то, осуществлена или нет модификация датчика и/или сигнальной линии.
В общем, такие технологии анализа известны в данной области техники и могут легко применяться в сценарии, описанном в данном документе. Следовательно, нет необходимости в том, чтобы предоставлять более подробную информацию относительно анализа в этот момент.
Способ включает в себя прием сигнала датчика на сигнальной линии датчика. Способ также включает в себя прием контрольных данных. Контрольные данные служат признаком результата анализа шумового сигнала на сигнальной линии . Способ также включает в себя избирательную обработку сигнала датчика в зависимости от контрольных данных.
Компьютерный программный продукт или компьютерная программа включает в себя программный код. Программный код может выполняться посредством схемы управления. Выполнение программного кода инструктирует схеме управления осуществлять способ, который включает в себя прием сигнала датчика на сигнальной линии датчика. Способ также включает в себя прием контрольных данных. Контрольные данные служат признаком результата анализа шумового сигнала на сигнальной линии . Способ также включает в себя избирательную обработку сигнала датчика в зависимости от контрольных данных.
Например, способ может осуществляться посредством модуля управления, например, посредством схемы управления модуля управления. Модуль управления может включать в себя интерфейс ввода. Например, интерфейс ввода может включать в себя аналого-цифровой преобразователь в сценарии, в котором сигнал датчика передается в аналоговой области на сигнальной линии . В других сценариях, также представляется возможным, что сигнал датчика передается в цифровой области на сигнальной линии . Здесь, сигнал датчика может кодировать в цифровой форме значения измерения датчиков. В таком сценарии, датчик может включать в себя аналого-цифровой преобразователь.
Представляется возможным, что сигнал датчика включен в наложенный сигнал; наложенный сигнал может включать в себя как сигнал датчика, так и шумовой сигнал. После этого, согласно определенным технологиям, может реализовываться подавление шумов, чтобы извлекать сигнал датчика. Подавление шумов, в общем, может означать технологию отделения сигнала датчика от шумового сигнала. Здесь, согласно определенным реализациям, остаточные доли шумового сигнала могут удерживаться в сигнале датчика, в силу этого задавая отношение "сигнал-шум" сигнала датчика.
Контрольные данные могут приниматься из модуля анализа. Модуль анализа может быть удаленным от и/или реализовываться отдельно от модуля управления. В силу этого, модернизация функциональности верификации может упрощаться.
Например, если контрольные данные служат признаком нарушения целостности сигнала датчика, обработка сигнала датчика может не реализовываться и/или прерываться. В другом случае, если контрольные данные не служат признаком модификации сигнала датчика, то обработка сигнала датчика может выполняться, продолжаться или начинаться.
С другой стороны, представляется возможным, что контрольные данные служат признаком классификации результата анализа относительно множества категорий. Затем в зависимости от конкретной классификации, могут предприниматься различные действия относительно обработки сигнала датчика. Например, сигнал датчика может обрабатываться различными способами, в зависимости от классификации.
Согласно определенным сценариям, шумовой сигнал может обнаруживаться; это может реализовываться как часть подавления шумов при отделении сигнала датчика от шумового сигнала на основе наложенного сигнала. Затем способ дополнительно может включать в себя передачу управляющих данных, которые кодируют в цифровой форме шумовой сигнал, например, в модуль анализа. Это может помогать упрощать аппаратную архитектуру, поскольку может не требоваться реализовывать отдельное считывание показаний сигнальной линии , ассоциированной с анализом шумового сигнала.
Например, контрольные данные могут включать в себя криптографический ключ. Затем сигнал датчика может обрабатываться на основе криптографического ключа. Эта реализация может помогать эффективно подавлять обработку сигнала датчика, если нарушение целостности обнаруживается на основе анализа шумового сигнала. Это может уменьшать соответствующие векторы атаки.
Альтернативно или дополнительно, представляется возможным удалять криптографический ключ, ассоциированный с упомянутой обработкой сигнала датчика, на основе результата анализа. С другой стороны, это помогает эффективно предотвращать обработку сигнала датчика в случае, если обнаруживается нарушение целостности. Такие технологии могут упоминаться как обнуление. Векторы атаки могут уменьшаться.
Согласно примеру, способ включает в себя управление формирователем сигналов для того, чтобы формировать шумовой сигнал. Способ дополнительно может включать в себя подачу шумового сигнала в сигнальную линию датчика.
Компьютерный программный продукт или компьютерная программа включает в себя программный код. Программный код может выполняться посредством схемы управления. Выполнение программного кода инструктирует схеме управления осуществлять способ, который включает в себя управление формирователем сигналов для того, чтобы формировать шумовой сигнал. Способ дополнительно может включать в себя подачу шумового сигнала в сигнальную линию датчика.
Способ может дополнительно включать в себя: подачу сигнала датчика для датчика в сигнальную линию . В силу этого, может получаться наложенный сигнал, который включает в себя как шумовой сигнал, так и сигнал датчика.
Например, способ может включать в себя задание конфигурации формирователя сигналов на основе сигнала датчика для датчика. Посредством конфигурации формирователя сигналов, могут уменьшаться помехи между сигналом датчика и шумовым сигналом. Например, уровень сигнала для шумового сигнала и/или частотный спектр шумового сигнала могут задаваться надлежащим образом посредством конфигурации. В силу этого, представляется возможным реализовывать технологии дуплекса с частотным разделением каналов, чтобы упрощать подавление шумов в соответствующем модуле управления.
Конфигурационные данные, указывающие конфигурацию формирователя сигналов, могут передаваться. Например, конфигурационные данные могут передаваться в модуль управления, чтобы за счет этого упрощать подавление шумов в модуле управления. Альтернативно или дополнительно, конфигурационные данные могут передаваться в модуль анализа, выполненный с возможностью анализировать шумовой сигнал, чтобы за счет этого верифицировать сигнал датчика. Предоставление конфигурационных данных, указывающих конфигурацию, может помогать реализовывать анализ шумового сигнала.
Формирователь сигналов может работать с возможностью формировать шумовой сигнал на основе криптографического ключа. Например, криптографический ключ может приниматься из модуля анализа. В силу этого, может уменьшаться вектор атаки, включающий в себя модификацию формирования шумового сигнала.
Модуль анализа включает в себя схему управления, выполненную с возможностью устанавливать шумовой сигнал на сигнальной линии датчика. Схема управления также выполнена с возможностью выполнять анализ шумового сигнала и передавать контрольные данные, указывающие результат анализа.
Модуль управления включает в себя схему управления, выполненную с возможностью выполнять прием сигнала датчика для сигнальной линии датчика. Схема управления дополнительно выполнена с возможностью принимать контрольные данные. Контрольные данные служат признаком результата анализа шумового сигнала на сигнальной линии . Схема управления также выполнена с возможностью избирательно обрабатывать сигнал датчика, в зависимости от контрольных данных.
Датчик включает в себя схему управления, выполненную с возможностью выполнять управление формирователем сигналов для того, чтобы формировать шумовой сигнал. Способ дополнительно может включать в себя подачу шумового сигнала в сигнальную линию датчика.
Следует понимать, что признаки, упомянутые выше, и признаки, которые еще должны поясняться ниже, могут использоваться не только в соответствующих указываемых комбинациях, но также и в других комбинациях либо отдельно без отступления от объема изобретения.
Краткое описание чертежей
Фиг. 1 схематично иллюстрирует систему, включающую в себя датчик, модуль управления и модуль анализа согласно различным примерам.
Фиг. 2 является блок-схемой последовательности операций способа согласно различным примерам.
Фиг. 3 является блок-схемой последовательности операций способа согласно различным примерам.
Фиг. 4 является блок-схемой последовательности операций способа согласно различным примерам.
Фиг. 5 является схемой последовательности сигналов, иллюстрирующей связь между несколькими датчиками, модулем управления и модулем анализа согласно различным примерам.
Фиг. 6 является схемой последовательности сигналов, иллюстрирующей связь между несколькими датчиками, модулем управления и модулем анализа согласно различным примерам.
Фиг. 7 схематично иллюстрирует систему согласно опорным реализациям.
Фиг. 8 схематично иллюстрирует систему, включающую в себя датчик, модуль управления и модуль анализа согласно различным примерам.
Фиг. 9 схематично иллюстрирует модуль анализа согласно различным примерам.
Фиг. 10 схематично иллюстрирует модуль управления и модуль анализа согласно различным примерам.
Подробное описание вариантов осуществления
Далее подробно описываются варианты осуществления настоящего изобретения со ссылкой на прилагаемые чертежи. Следует понимать, что нижеприведенное описание вариантов осуществления не должно рассматриваться в ограничивающем смысле. Объем изобретения не имеет намерение быть ограниченным посредством вариантов осуществления, описанных в дальнейшем или посредством чертежей, которые считаются только иллюстративными.
Чертежи должны рассматриваться как схематичные представления, и элементы, проиллюстрированные на чертежах, не обязательно показаны в масштабе. Наоборот, различные элементы представляются таким образом, что их функциональная и общая цель становится очевидной для специалистов в данной области техники. Любое соединение или связывание между функциональными блоками, устройствами, компонентами или другими физическими или функциональными модулями, показанными на чертежах или описанными в данном документе, также может реализовываться посредством косвенного соединения или связывания. Связывание между компонентами также может устанавливаться по беспроводному соединению. Функциональные блоки могут реализовываться в аппаратных средствах, микропрограммном обеспечении, программном обеспечении или в комбинации вышеозначенного.
В дальнейшем в этом документе, описываются технологии верификации сигнала датчика. Нарушение целостности может обнаруживаться. Это помогает уменьшать векторы атаки, которые включают в себя модификацию датчика и/или сигнальной линии датчика. Датчик в силу этого может соединяться с модулем управления для обработки сигнала датчика защищенным способом.
Согласно примерам, шумовой сигнал на сигнальной линии датчика устанавливается. Это может включать в себя извлечение сигнала датчика из наложенного сигнала, который включает в себя как сигнал датчика, так и шумовой сигнал. После этого, модуль анализа, который может быть отдельным от модуля управления для обработки сигнала датчика, может выполнять анализ шумового сигнала. На основе результата анализа, контрольные данные могут передаваться из модуля анализа и затем приниматься посредством модуля управления. Модуль управления затем может избирательно обрабатывать данные датчиков, на основе контрольных данных.
В силу этого, можно проверять то, датчик и/или линия датчиков манипулируется и/или испытывает сбой либо нет. В частности, посредством базирования на модуле анализа, модернизация функциональности верификации становится возможной, типично без необходимости значительных модификаций датчика и модуля управления.
Например, анализ может включать в себя сравнение шумового сигнала с опорным сигналом; если отклонение шумового сигнала из опорного сигнала обнаруживается, то контрольные данные могут инициировать предупреждение.
В качестве общего правила, различные меры противодействия могут реализовываться в связи с функциональностью верификации. Например, человеко-машинный интерфейс может управляться для того, чтобы отображать предупреждающее сообщение. Альтернативно или дополнительно, поврежденный датчик может разъединяться, так что датчик может обнаруживаться как "не присутствующий" или находящийся в состоянии сбоя. Модуль управления может принимать соответствующие меры противодействия, например, активировать безопасное состояние или автоматическое выключение в автономном рабочем режиме. Альтернативно или помимо таких предупреждений, управляющие данные могут прерывать обработку данных датчиков в случае, если обнаружена модификация датчика и/или сигнальной линии . Это помогает исключать обработку ненадежных, модифицированных значений измерения, включенных в данные датчиков.
В качестве общего правила, сценарии, описанные в данном документе, могут находить применение в различных вариантах использования. Например, датчики могут использоваться для управления автоматизированной системой, такой как электростанция, турбина, генератор, ветроэнергетическая установка, локомотив, завода по промышленному стандарту 2.0, эскалатор, медицинское оборудование, к примеру, оборудование медицинской визуализации и т.д. Сценарии, описанные в данном документе, могут упрощать безопасную работу таких автоматизированных систем на основе доверенных сигналов датчиков. Уровень доверия сигналов датчиков может повышаться посредством верификации целостности, описанной в данном документе.
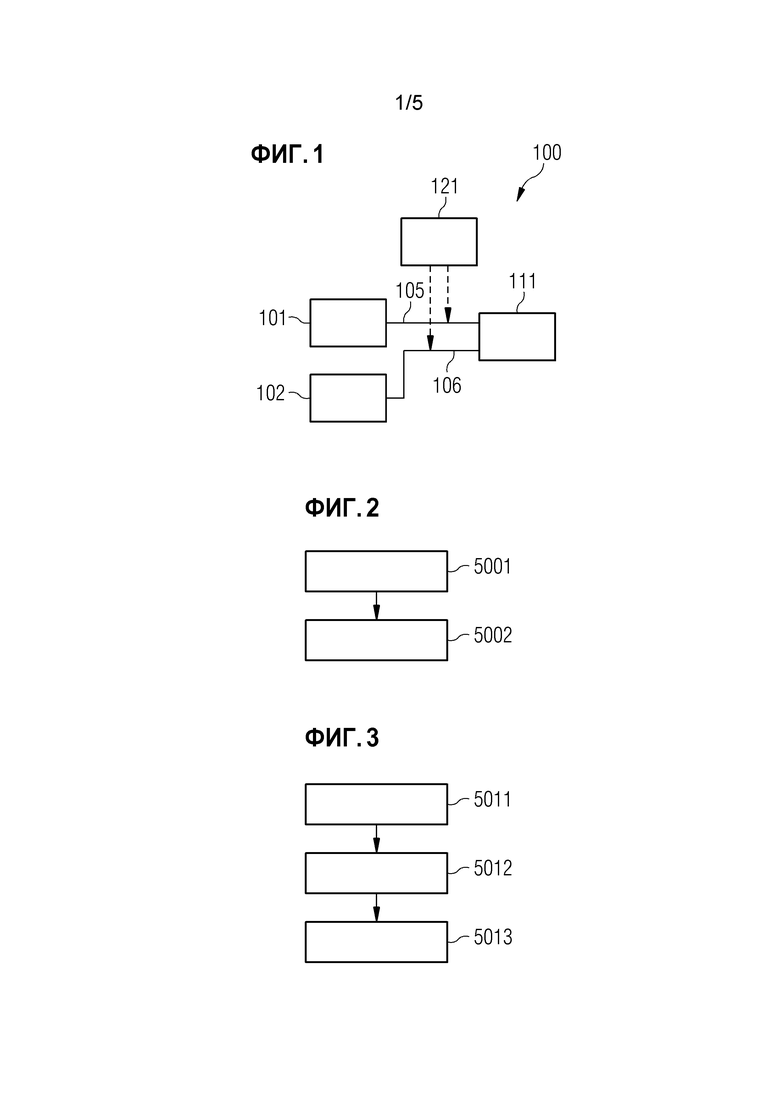
Фиг. 1 схематично иллюстрирует аспекты относительно системы 100, включающей в себя несколько датчиков 101, 102. В некоторых примерах, система 100 может включать в себя только один датчик или более двух датчиков.
Согласно различным технологиям, описанным в данном документе, датчик может быть выполнен с возможностью измерять физическую наблюдаемую величину. Могут измеряться различные физические наблюдаемые величины, например, температура, давление, ускорение и т.д. Различные датчики системы 100 могут измерять различные физические наблюдаемые величины или идентичную физическую наблюдаемую величину.
Датчики 101, 102 соединяются через сигнальные линии 105, 106 с модулем 111 управления.
Модуль 111 управления может включать в себя схему управления. Например, схема управления может реализовываться с использованием одного или более из микропроцессора, программируемой пользователем матрицы (FPGA) и специализированной интегральной схемы (ASIC). Модуль 100 управления также может включать в себя интерфейс, выполненный с возможностью принимать сигналы датчиков из датчиков 101, 102 на сигнальные линиях 105, 106.
Сигнал датчика может служить признаком соответствующего значения измерения, например, временной эволюции значения измерения. Сигнал датчика может предоставляться в цифровой области или в аналоговой области.
Сигнальные линии 105, 106 могут реализовываться как стационарные проводные соединения и/или беспроводные соединения.
Система 100 также включает в себя модуль 121 анализа.
С другой стороны, модуль 121 анализа может включать в себя схему управления, например, реализованную посредством микропроцессора, FPGA или ASIC. Модуль 121 анализа может включать в себя интерфейс, выполненный с возможностью обмена данными с модулем 111 управления. Модуль 121 анализа может быть выполнен с возможностью выполнять анализ шумового сигнала сигнальных линий 105, 106. Чтобы устанавливать шумовой сигнал в модуле 121 анализа, возможны различные технологии. В одном сценарии, модуль 121 анализа может обнаруживать шумовой сигнал с использованием считывания показаний сигнальных линий 105, 106, например, индуктивного считывания показаний (проиллюстрировано посредством пунктирных стрелок на фиг. 1). В других сценариях, представляется возможным, что шумовой сигнал устанавливается посредством приема управляющих данных, кодирующих в цифровой форме шумовой сигнал из модуля 111 управления.
После этого, на основе анализа шумового сигнала, контрольные данные могут передаваться посредством модуля 121 анализа и приниматься посредством модуля 111 управления. Контрольные данные могут служить признаком результата анализа.
В силу этого, появляется возможность принимать соответствующие меры противодействия, если требуется, в модуле 111 управления, например, если результат анализа служит признаком нарушения целостности сигнала датчика вследствие модификации датчиков 101, 102 и/или сигнальных линий 105, 106.
Например, модуль 111 управления может обрабатывать или может не обрабатывать сигнал датчика, в зависимости от контрольных данных.
В дальнейшем подробнее поясняется функциональность верификации, предоставленная посредством системы 100, относительно фиг. 2-4. Фиг. 2-4 иллюстрируют аспекты логики, выполняемой посредством датчиков 101, 102, модуля 121 анализа и модуля 111 управления.
Фиг. 2 является блок-схемой последовательности операций способа согласно различным примерам. Например, способ согласно фиг. 2 может осуществляться посредством одного из датчиков 101, 102 согласно примеру по фиг. 1, например, посредством соответствующей схемы управления. Фиг. 2 иллюстрирует аспекты относительно формирования шумового сигнала.
В сценарии по фиг. 2, на этапе 5001, формирователь сигналов работает с возможностью формировать шумовой сигнал.
Затем, на этапе 5002, шумовой сигнал подается в сигнальную линию соответствующего датчика. В силу этого, может формироваться наложенный сигнал, который включает в себя как сигнал датчика, указывающий физическую наблюдаемую величину, измеренную посредством датчика, так и шумовой сигнал.
В сценарии по фиг. 2, формирователь сигналов работает с возможностью формировать шумовой сигнал. Тем не менее, в других сценариях, также представляется возможным, что шумовой сигнал не формируется посредством управления формирователя сигналов; а вместо этого формируется косвенно с окружением датчика. Следовательно, шумовой сигнал может, по сути, присутствовать вследствие влияний окружающей среды, таких как помехи, перекрестные помехи, тепловые эффекты и т.д.
Согласно различным примерам, представляется возможным, что, на этапе 5001, шумовой сигнал формируется на основе криптографического ключа. Например, псевдослучайный сигнал может формироваться в качестве шумового сигнала, в зависимости от криптографического ключа. Сигнал растянутой полосы частот может формироваться.
Согласно различным сценариям, гибкая работа формирователя сигналов, формирующего шумовой сигнал, является возможной. Например, представляется возможным, что конфигурация формирователя сигналов задается на основе сигнала датчика для датчика. Например, конфигурация может упрощать уменьшение перекрестных помех или помех между сигналом датчика и шумовым сигналом. Это может достигаться посредством выбора конфигурации надлежащим образом. Конфигурация может включать в себя уровень сигнала для шумового сигнала. Конфигурация может включать в себя частотный спектр шумового сигнала. Затем соответствующая фильтрация может реализовываться в аналого-цифровом преобразователе. Фильтрация может реализовываться в соответствии с подавлением шумов, например, в интерфейсе модуля 111 управления. Например, может реализовываться полосовой фильтр, фильтр нижних частот или фильтр верхних частот.
Чтобы упрощать такое разделение компонентов наложенного сигнала, представляется возможным, что способ согласно фиг. 2 дополнительно включает в себя передачу конфигурационных данных, которые служат признаком конфигурации формирователя сигналов. На основе таких конфигурационных данных, в таком случае можно реализовывать технологии подавления шумов. Кроме того, анализ шумового сигнала может точно реализовываться. Например, посредством гибкого регулирования формирования шумового сигнала время от времени, может обеспечиваться новизна, в силу этого уменьшая векторы атаки, такие как атаки с повторением пакетов.
Фиг. 3 является блок-схемой последовательности операций способа согласно различным примерам. Например, способ согласно фиг. 3 может осуществляться посредством модуля 121 анализа согласно сценарию по фиг. 1, например, посредством схемы управления модуля 121 анализа.
На этапе 5011, шумовой сигнал устанавливается. Предусмотрены различные технологии, доступные для установления шумового сигнала на этапе 5011. Например, шумовой сигнал может считываться из линии передачи аналоговых служебных сигналов датчика, например, с использованием индуктивного считывания показаний. Такой сценарий упрощает простую модернизацию, поскольку такое считывание показаний шумового сигнала может реализовываться без модификации сигнальной линии либо датчика, либо модуля управления. В таком случае, существующие системы не должны обязательно проходить тесты функциональности и т.д., поскольку существующие компоненты, такие как датчик, сигнальная линия и модуль управления, не затрагиваются посредством считывания показаний. Это может быть, в частности, релевантным для систем мониторинга и защиты, поскольку в таком сценарии обнаружение шумового сигнала и анализ шумового сигнала не обязательно должны быть частью сертифицированный по технической безопасности процедур. С другой стороны, в частности, для системы мониторинга и защиты, имеется постоянная потребность в верификации сигналов датчиков на предмет модификации датчика и/или сигнальной линии .
В другой примерной реализации этапа 5011, не требуется то, что шумовой сигнал должен обнаруживаться посредством соответствующей логики модуля анализа, осуществляющего способ по фиг. 3. Наоборот, представляется возможным принимать управляющие данные, которые кодируют в цифровой форме шумовой сигнал, например, из модуля управления, выполненного с возможностью обрабатывать сигнал датчика. Это может быть полезным, если модуль управления уже выполнен с возможностью обнаруживать шумовой сигнал посредством реализации подавления шумов для отделения сигнала датчика от шумового сигнала в наложенном сигнале. После этого, такая функциональность может многократно использоваться для того, чтобы устанавливать шумовой сигнал.
Затем, на этапе 5012, анализ шумового сигнала выполняется. Это, например, может включать в себя проверку совпадения между шумовым сигналом и опорным сигналом. В качестве общего правила, анализ на этапе 5012 может основываться на различных опорных технологиях, например, на статистическом анализе, таком как анализ спектральной плотности мощности, на обнаружении аномалий, извлечении цифровых отпечатков, обнаружении шаблонов, спектральном анализе, машинном обучении и т.д.
В некоторых сценариях, представляется возможным, что способ дополнительно включает в себя прием конфигурационных данных, которые служат признаком конфигурации формирователя сигналов, выполненного с возможностью формировать шумовой сигнал, см. фиг. 2: этап 5001. После этого, анализ этапа 5012 и/или установление шумового сигнала этапа 5011 может реализовываться на основе конфигурационных данных. Например, конфигурационные данные могут упрощать отделение шумового сигнала от других компонентов наложенного сигнала. Например, посредством гибкого регулирования формирования шумового сигнала, может обеспечиваться новизна, в силу этого уменьшая векторы атаки, такие как атаки с повторением пакетов.
В простом сценарии, результат анализа на этапе 5012 служит признаком различения "Да/Нет" относительно успешной верификации сигнала датчика. В других сценариях, больше информации относительно результата анализа может быть доступной. Результат анализа может предоставляться на более высоком уровне детализации. Например, результат анализа может классифицироваться. Здесь, соответствующие категории могут быть предварительно заданы для классификации. Примерные категории проводят различие относительно уровня критичности модификации, к примеру, манипулирование с низкой степенью серьезности по сравнению с манипулированием с высокой степенью серьезности, тип отклонения от опорного сигнала, сбой датчика по сравнению со сбоем сигнальной линии , манипулирование датчиком по сравнению с манипулированием сигнальной линией и т.д.
Таким образом, в качестве общего правила, классификация результата анализа может выполняться относительно множества категорий. После этого, контрольные данные могут служить признаком классификации. Это помогает индивидуально адаптировать меры противодействия, реализованные в модуле управления, например, если верификация сигнала датчика сбоит. Например, в зависимости от серьезности сбоя верификации, различные меры противодействия могут реализовываться: например, графический пользовательский интерфейс может управляться для того, чтобы отображать предупреждающее сообщение в менее серьезных сценариях, либо чрезвычайная остановка управляемой системы может реализовываться в более серьезных сценариях.
На 5013, контрольные данные, указывающие результат анализа, передаются. Например, контрольные данные могут передаваться в модуль 111 управления (см. фиг. 1). Контрольные данные могут служить признаком классификации результата анализа.
Контрольные данные могут упрощать меры противодействия, если сигнал датчика не может верифицироваться. Например, контрольные данные могут инициировать отключение соответствующего датчика. Например, контрольные данные могут включать в себя предупреждающее сообщение таким образом, что модуль управления может принимать соответствующие меры противодействия.
Представляется возможным, что контрольные данные включают в себя криптографический ключ. Криптографический ключ может использоваться в модуле 111 управления. Криптографический ключ затем может использоваться посредством модуля 111 управления, по меньшей мере, для одного или более из следующего: дешифрование; шифрование; вычисление подписи; верификация подписи; создание экземпляра ключа. Контрольные данные могут избирательно включать в себя криптографический ключ, в зависимости от результата анализа. Например, если анализ служит признаком модификации датчика и/или сигнальной линии , то криптографический ключ может не быть включен в контрольные данные.
Альтернативно или помимо передачи контрольных данных в модуль управления, также представляется возможным, чтобы передавать контрольные данные на сервер внутренней интерфейсной системы. Например, это может реализовываться на основе соединения сотовой связи. Может реализовываться организация черных списков. Устройство управления защитой может содержать контрольные данные.
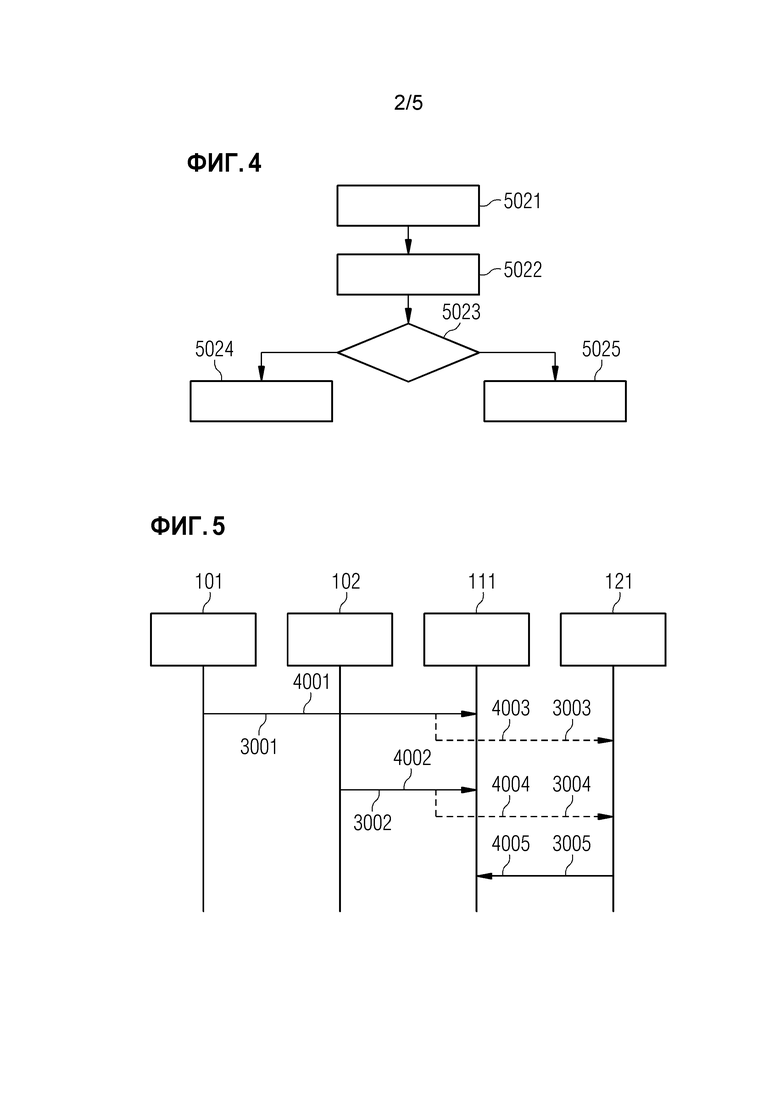
Фиг. 4 иллюстрирует способ согласно различным примерам. Например, способ согласно сценарию по фиг. 4 может осуществляться посредством модуля 111 управления сценария по фиг. 1, например, посредством соответствующей схемы управления модуля 111 управления.
На этапе 5021, сигнал датчика принимается. Например, на этапе 5021, может приниматься наложенный сигнал, включающий в себя сигнал датчика и шумовой сигнал. После этого, на основе технологий подавления шумов, может извлекаться сигнал датчика. Сигнал датчика может приниматься через сигнальную линию соответствующего датчика. Сигнал датчика может приниматься в цифровой области или в аналоговой области. В связи с этим, этап 5021 может включать в себя аналого-цифровое преобразование.
Затем, на этапе 5022, контрольные данные принимаются. Контрольные данные служат признаком результата анализа шумового сигнала на сигнальной линии . В связи с этим, этап 5022 может быть взаимосвязан с этапом 5013.
На этапе 5023, проверяется то, верифицирована или нет целостность сигнала датчика, принимаемого на этапе 5021, посредством контрольных данных. Следовательно, в зависимости от контрольных данных, сигнал датчика либо обрабатывается на этапе 5024; либо не обрабатывается на этапе 5025.
Обработка на этапе 5024 может заключать в себе использование криптографического ключа, включенного в контрольные данные. Это повышает уровень безопасности посредством уменьшения векторов атаки, которые пытаются обходить получение контрольных данных.
Фиг. 5 является схемой последовательности сигналов, иллюстрирующей связь между датчиками 101, 102, модулем 111 управления и модулем 121 анализа согласно различным примерам.
На 4001, сигнал 3001 датчика передается посредством датчика 101 и принимается посредством модуля 111 управления. На 4002, сигнал 3002 датчика передается посредством датчика 102 и принимается посредством модуля 111 управления.
Сигналы 3001, 3002 датчиков могут быть включены в соответствующие наложенные сигналы, которые также включают в себя шумовые сигналы.
На 4003, шумовой сигнал 3003 считывается из связи между датчиком 101 и модулем 111 управления и принимается посредством модуля 121 анализа. Аналогично, на 4004, шумовой сигнал 3004 считывается из связи между датчиком 102 и модулем 111 управления и принимается посредством модуля 121 анализа.
Модуль 121 анализа затем может выполнять анализ шумовых сигналов 3003, 3004 и передавать соответствующие контрольные данные 3005 на 4005.
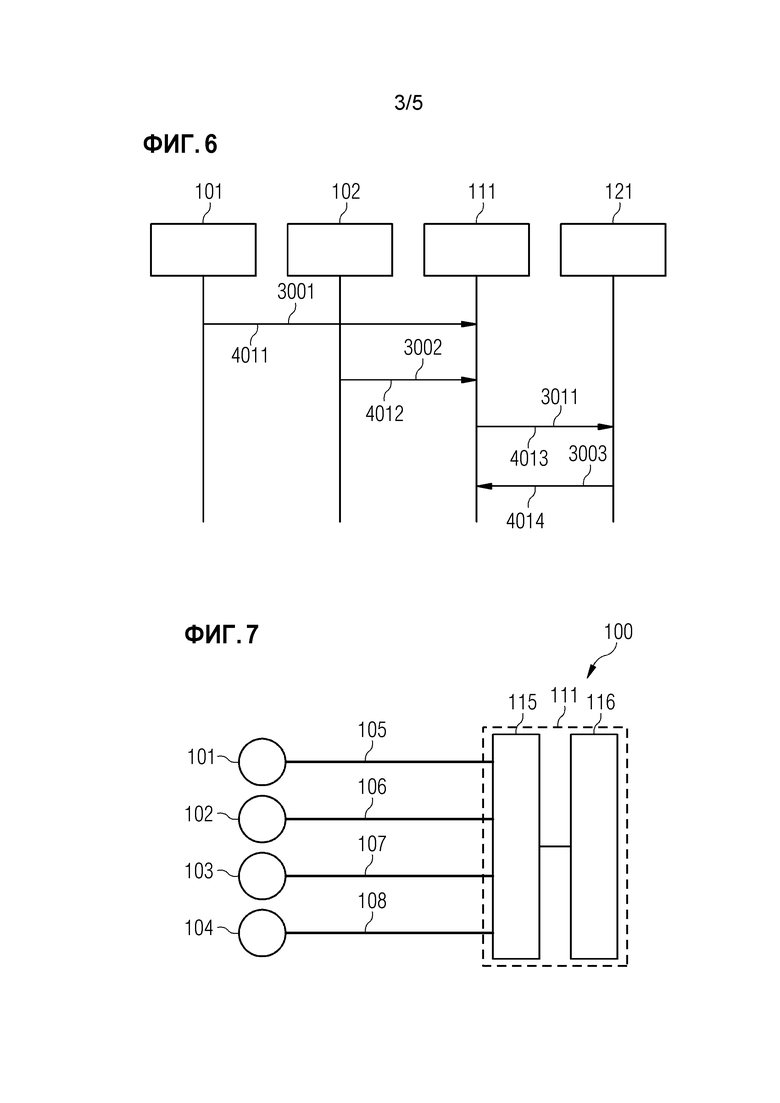
Фиг. 6 является схемой последовательности сигналов связи между датчиком 101, датчиком 102, модулем 111 управления и модулем 121 анализа.
4011, в общем, соответствует 4001. 4012, в общем, соответствует 4002.
На 4013, управляющие данные 3011, кодирующие в цифровой форме шумовой сигнал, передаются посредством модуля 111 управления и принимаются посредством модуля 121 анализа.
С другой стороны, модуль 121 анализа затем может выполнять анализ шумового сигнала и, на 4014, передавать контрольные данные 3003 в модуль 111 управления.
Фиг. 7 иллюстрирует аспекты относительно системы 100. Сценарий по фиг. 7, в общем, соответствует сценарию по фиг. 1. В сценарии по фиг. 7, система 100 включает в себя датчики 101-104 с ассоциированными сигнальными линиями 105-108. На фиг. 7, проиллюстрированы интерфейс 115 и схема 116 управления модуля 111 управления.
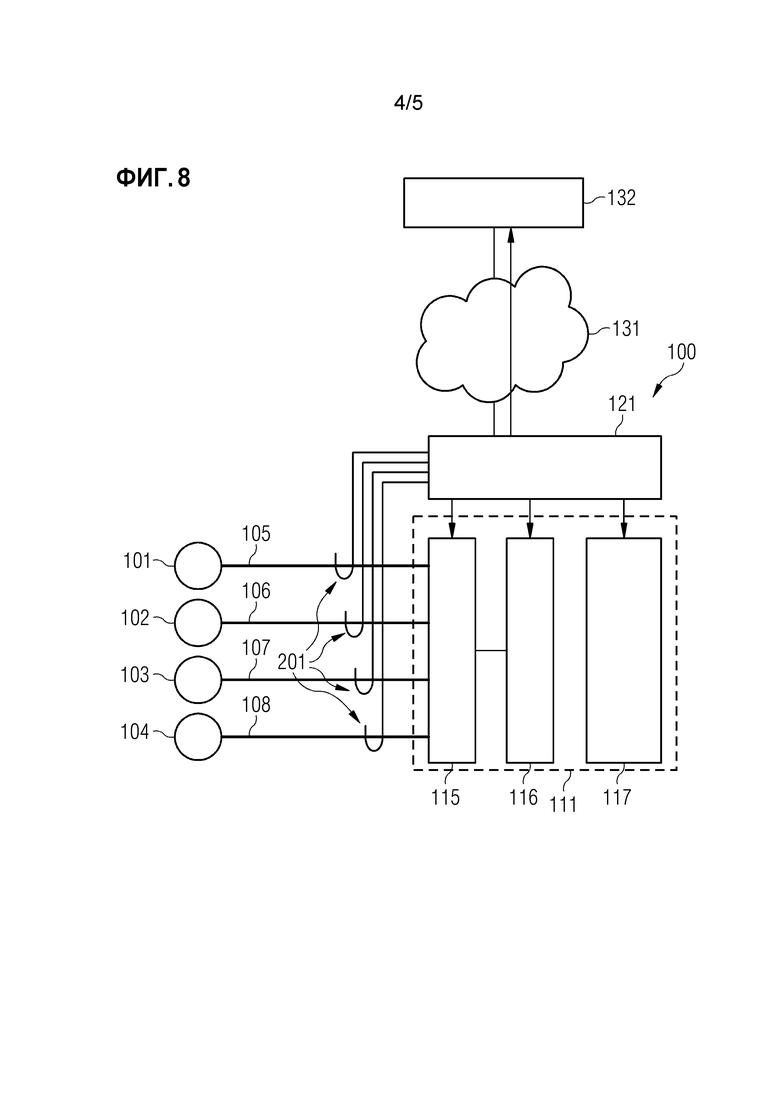
Фиг. 8 иллюстрирует аспекты относительно системы 100. В сценарии по фиг. 8, модуль 121 анализа выполнен с возможностью обнаруживать шумовой сигнал 3003, 3004 на основе индуктивного считывания 201 показаний на сигнальных линиях 105-108. В сценарии по фиг. 8, модуль 111 управления дополнительно содержит защитную схему 117, которая является, в общем, необязательной. Интерфейс 115, схема 116 управления и защитная схема 117 могут принимать контрольные данные; в других сценариях, представляется возможным, что только некоторые компоненты 115-117 принимают контрольные данные.
Из сравнения фиг. 7 и 8 следует, что можно модернизировать функциональность верификации без необходимости модифицировать сигнальные линии 105-108, датчики 101-104 и модуль 111 управления.
В сценарии по фиг. 8, модуль 121 анализа соединяется с сервером 132 внутренней интерфейсной системы через открытую сеть 131, к примеру, Интернет или офисную сеть. Альтернативно или помимо передачи контрольных данных в модуль 111 управления, представляется возможным, что модуль 121 анализа передает контрольные данные на сервер 131, чтобы принимать соответствующие меры противодействия.
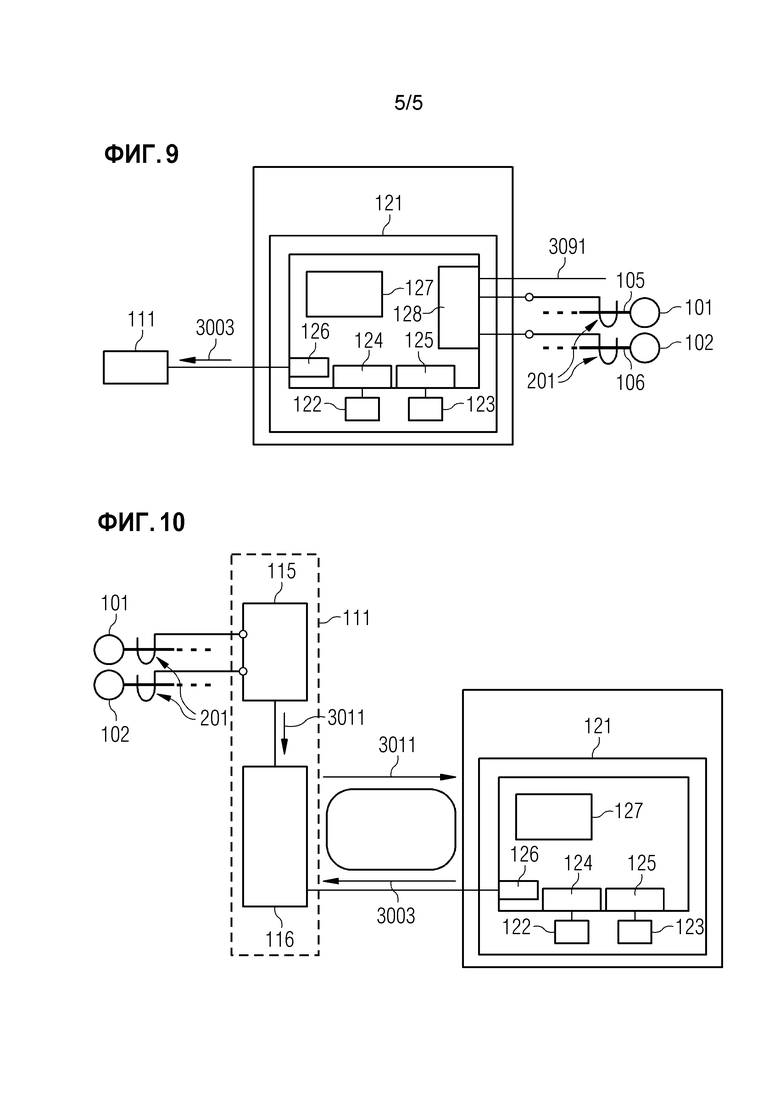
Фиг. 9 иллюстрирует аспекты относительно модуля 121 анализа. Например, модуль 121 анализа может реализовываться как аппаратный модуль системы безопасности (HSM). Например, HSM может реализовываться как модуль расширения для промышленного PC (IPC), соединяемого через RS-232, PCIE, SPI или USB с IPC. Модуль 121 анализа может реализовываться в HSM в программном обеспечении на центральном процессоре или микроконтроллере и/или в аппаратных средствах, например, посредством FPGA. В предпочтительном сценарии, используется внутрикристальная система, например, защищенная от несанкционированного вмешательства схема 116 управления.
В сценарии по фиг. 9, оперативное запоминающее устройство 121 соединяется через шифрование 124 на шине с соответствующей схемой 127 управления. Флэш-память 123 соединяется через флэш-контроллер 125 со схемой 127 управления. Предусмотрен интерфейс 128, который упрощает индуктивное считывание 201 показаний и/или необязательно может принимать аварийный сигнал 3091. Зашифрованная запись и/или считывание для оперативного запоминающего устройства 122 и/или флэш-памяти 123 являются возможными. Интерфейс 126 выполнен с возможностью предоставлять контрольные данные 3003 в модуль 111 управления. Например, опорный сигнал, подвергающийся сравнению с шумовым сигналом, может сохраняться во флэш-памяти 123.
Модуль 121 анализа затем может подтверждать (например, посредством криптографических контрольных сумм, таких как цифровая подпись, код аутентификации сообщений и т.д.) то, что шумовой сигнал совпадает с опорным сигналом и за счет этого является априорным допущением. В силу этого, можно верифицировать соответствующий сигнал датчика, который передается на соответствующих сигнальных линиях 105-108 и который типично накладывается с шумовым сигналом.
В одном варианте, модуль 121 анализа сохраняет криптографический ключ и избирательно передает криптографический ключ в качестве части контрольных данных 3003 в модуль 111 управления. Криптографический ключ затем может использоваться посредством модуля 111 управления, по меньшей мере, для одного или более из следующего: дешифрование; шифрование; вычисление подписи; верификация подписи; создание экземпляра ключа. Использование криптографического ключа обеспечивается, если верификация сигнала датчика на основе анализа шумового сигнала предоставляет положительный результат. В дополнительном варианте, криптографический ключ удаляется в ответ на сбой верификации сигнала датчика.
Фиг. 10 схематично иллюстрирует аспекты относительно модуля 121 анализа. Сценарий по фиг. 10, в общем, соответствует сценарию по фиг. 9. Тем не менее, в сценарии по фиг. 10, шумовой сигнал 3011 не получается с использованием индуктивного считывания 201 показаний; наоборот, управляющие данные 3011 формируются посредством интерфейса 115 модуля 111 управления, например, посредством аналого-цифрового преобразователя интерфейса 115. Управляющие данные кодируют в цифровой форме шумовой сигнал, который обнаруживается посредством интерфейса 115. Затем управляющие данные передаются посредством модуля 111 управления и принимаются посредством модуля 121 анализа. В связи с этим, сценарий по фиг. 10, в общем, соответствует сценарию по фиг. 6.
Обобщая вышесказанное, описаны технологии верификации целостности сигнала датчика. На основе описанных технологий, становится возможным модернизация существующих систем, включающих в себя один или более датчиков с модулем управления с функциональностью верификации. Это достигается в некоторых примерах посредством предоставления отдельного модуля анализа.
Технология может применяться, например, к физически удаленным датчикам. Здесь, может быть возможным реализовывать считывание показаний, например, индуктивное считывание показаний, около модуля управления.
Технологии, описанные в данном документе, имеют такое преимущество, что, критичное с точки зрения безопасности оборудование на основе обработки сигнала датчика посредством модуля управления не должно повторно сертифицироваться, когда функциональность верификации модернизирована; это обусловлено тем, что существующая система из одного или более датчиков и модуля управления типично не должна модифицироваться или значительно модифицироваться. Дополнительное подтверждение не требуется.
Технологии, описанные в данном документе, имеют конкретные преимущества, по сравнению с опорными реализациями, в которых датчики и/или сигнальной линии развертываются в защищенных окружениях, например, в кабельных шахтах с защитой на основе аварийной сигнализации и с управляемым доступом. Таким образом, аппаратная сложность значительно уменьшается.
Хотя изобретение показано и описано относительно определенных предпочтительных вариантов осуществления, эквиваленты и модификации должны быть очевидными для специалистов в данной области техники после прочтения и понимания описания изобретения. Настоящее изобретение включает в себя все такие эквиваленты и модификации и ограничено только посредством объема прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАРТРИДЖ И ЗАПИСЫВАЮЩЕЕ УСТРОЙСТВО | 2003 |
|
RU2333837C2 |
| ТВЕРДОТЕЛЬНЫЙ ДАТЧИК ИЗОБРАЖЕНИЯ, СПОСОБ ЕГО ПРОИЗВОДСТВА И СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2011 |
|
RU2488190C1 |
| СИСТЕМА ИЗГОТОВЛЕНИЯ, УЧЕТА И ВЕРИФИКАЦИИ ЗАЩИТНЫХ ЗНАКОВ И ЗАЩИЩЕННЫХ ДОКУМЕНТОВ | 2004 |
|
RU2272320C1 |
| Устройство поиска информации | 2017 |
|
RU2656736C1 |
| Модуль управления параметрами помехового сигнала | 2025 |
|
RU2840341C1 |
| ЦИФРОВОЙ СИГНАЛЬНЫЙ ПРОЦЕССОР, УСТРОЙСТВО СВЯЗИ, СИСТЕМА СВЯЗИ И СПОСОБ ЭКСПЛУАТАЦИИ ЦИФРОВОГО СИГНАЛА ПРОЦЕССОРА | 2009 |
|
RU2525830C2 |
| СПОСОБ ВЕРИФИКАЦИИ ДЛЯ СИСТЕМЫ УМЕНЬШЕНИЯ КИСЛОРОДА | 2020 |
|
RU2811414C2 |
| ТЕРМИНАЛ, СПОСОБ УПРАВЛЕНИЯ ИМ И ЗАПИСЫВАЕМЫЙ НОСИТЕЛЬ | 2009 |
|
RU2419832C2 |
| Способ управления устройствами посредством обработки сигналов ЭЭГ | 2019 |
|
RU2717213C1 |
| СЕТЕВОЙ УЗЕЛ, БЕСПРОВОДНОЕ УСТРОЙСТВО И СПОСОБЫ, ВЫПОЛНЯЕМЫЕ В НИХ ДЛЯ ОБРАБОТКИ КОНТЕКСТНОЙ ИНФОРМАЦИИ СЕТИ РАДИОДОСТУПА (RAN) В СЕТИ БЕСПРОВОДНОЙ СВЯЗИ | 2015 |
|
RU2679182C1 |
Изобретение относится к способам снятия показаний датчиков. Технический результат заключается в обеспечении целостности датчиков и сигнальной линии путем их верификации с использованием шумового сигнала. Согласно различным вариантам осуществления это достигается посредством выполнения анализа шумового сигнала на сигнальной линии и передачи контрольных данных, указывающих результат анализа. 5 н. и 10 з.п. ф-лы, 10 ил.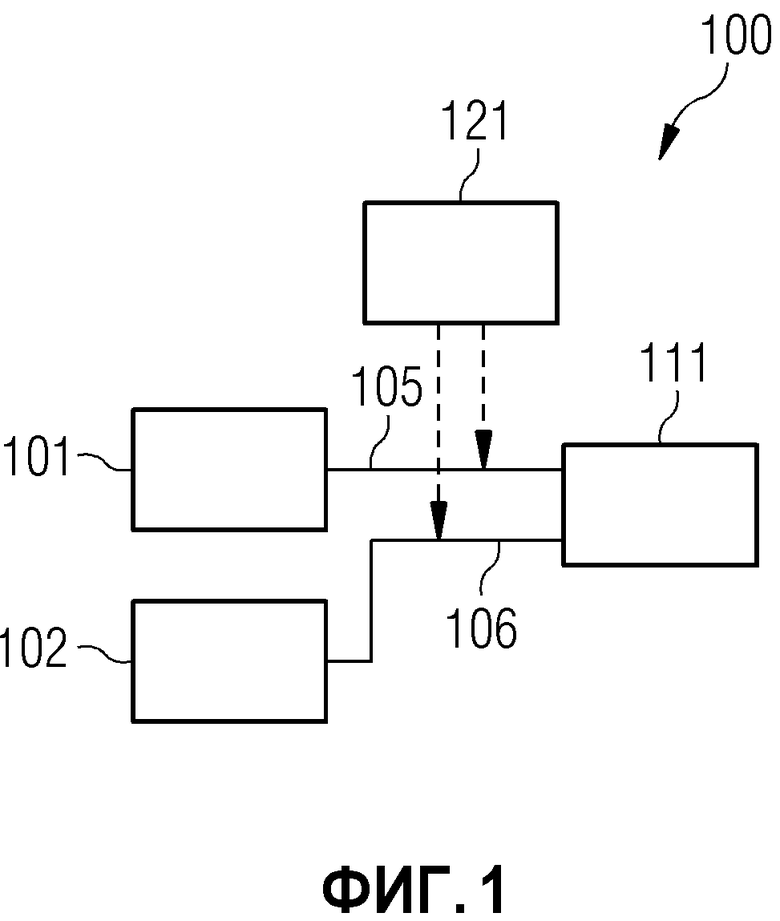
1. Способ проверки сигналов датчика, содержащий этапы, на которых:
устанавливают шумовой сигнал (3003, 3004) на сигнальной линии (105, 106, 107, 108) датчика (101, 102, 103, 104),
выполняют анализ шумового сигнала (3003, 3004) и
передают контрольные данные (3005), указывающие результат анализа для проверки того, произошло или нет манипулирование сигналом датчика.
2. Способ по п. 1,
в котором упомянутое установление шумового сигнала (3003, 3004) содержит этап, на котором обнаруживают шумовой сигнал (3003, 3004) с использованием индуктивного считывания показаний сигнальной линии (105, 106, 107, 108).
3. Способ по п. 1 или 2,
в котором упомянутое установление шумового сигнала (3003, 3004) содержит этап, на котором принимают управляющие данные (3011), кодирующие в цифровой форме шумовой сигнал (3003, 3004).
4. Способ по любому из предшествующих пунктов, дополнительно содержащий этап, на котором
выполняют классификацию результата анализа относительно множества категорий,
при этом контрольные данные (3005) служат признаком классификации.
5. Способ по п. 4,
в котором множество категорий содержат одно или более из следующего: манипулирование датчиком (101, 102, 103, 104); манипулирование сигнальной линией (105, 106, 107, 108); манипулирование с низкой степенью серьезности; манипулирование с высокой степенью серьезности; сбой датчика (101, 102, 103, 104) и сбой сигнальной линии (105, 106, 107, 108).
6. Способ по любому из предшествующих пунктов, дополнительно содержащий этап, на котором
принимают конфигурационные данные, указывающих конфигурацию формирователя сигналов, выполненного с возможностью формировать шумовой сигнал (3003, 3004),
при этом по меньшей мере одно из упомянутого установления и упомянутого выполнения анализа основано на конфигурационных данных.
7. Способ по любому из предшествующих пунктов,
в котором анализ содержит по меньшей мере одно из следующего: сравнение шумового сигнала (3003, 3004) с предварительно заданным опорным сигналом; обнаружение аномалий и спектральный анализ.
8. Способ проверки сигналов датчика, содержащий этапы, на которых:
принимают сигнал (3001, 3002) датчика на сигнальной линии (105, 106, 107, 108) датчика (101, 102, 103, 104),
принимают контрольные данные (3005), указывающие результат анализа шумового сигнала (3003, 3004), на сигнальной линии (105, 106, 107, 108) для проверки того, произошло или нет манипулирование сигналом датчика, и
в зависимости от контрольных данных (3005) избирательно обрабатывают сигнал (3001, 3002) датчика.
9. Способ по п. 8, дополнительно содержащий этапы, на которых:
обнаруживают шумовой сигнал (3003, 3004) и
передают управляющие данные, кодирующие в цифровой форме шумовой сигнал (3003, 3004).
10. Способ по п. 8 или 9,
в котором контрольные данные (3005) содержат криптографический ключ,
при этом сигнал (3001, 3002) датчика обрабатывают на основе криптографического ключа.
11. Способ по любому из пп. 8-10, дополнительно содержащий этап, на котором
удаляют криптографический ключ, ассоциированный с упомянутой обработкой сигнала (3001, 3002) датчика, на основе результата анализа.
12. Модуль (121) анализа, содержащий схему управления, выполненную с возможностью выполнять:
установление шумового сигнала (3003, 3004) на сигнальной линии (105, 106, 107, 108) датчика (101, 102, 103, 104),
анализ шумового сигнала (3003, 3004) и
передачу контрольных данных (3005), указывающих результат анализа для проверки того, произошло или нет манипулирование сигналом датчика.
13. Модуль (121) анализа по п. 12,
в котором схема управления выполнена с возможностью осуществлять способ по любому из пп. 1-7.
14. Модуль (111) управления, содержащий схему управления, выполненную с возможностью выполнять:
прием сигнала (3001, 3002) датчика на сигнальной линии (105, 106, 107, 108) датчика (101, 102, 103, 104),
прием контрольных данных (3005), указывающих результат анализа шумового сигнала (3003, 3004), на сигнальной линии (105, 106, 107, 108) для проверки того, произошло или нет манипулирование сигналом датчика, и
в зависимости от контрольных данных (3005) избирательную обработку сигнала (3001, 3002) датчика.
15. Система (100) проверки сигнала датчика, содержащая модуль (121) анализа по п. 12 и модуль (111) управления по п. 14.
| СПОСОБ ОПТИМАЛЬНОЙ ПЕРЕДАЧИ СООБЩЕНИЙ ЛЮБОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ, НАПРИМЕР, СПОСОБ ОПТИМАЛЬНОГО ЗВУКОВОСПРОИЗВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПТИМАЛЬНОГО, ПРОСТРАНСТВЕННОГО, АКТИВНОГО ПОНИЖЕНИЯ УРОВНЯ СИГНАЛОВ ЛЮБОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ | 1997 |
|
RU2145446C1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ ШУМОПОДОБНОГО СИГНАЛА | 1981 |
|
SU1840539A1 |

