Изобретения относятся к авиационной технике. Предназначены для предотвращения схода летательного аппарата (ЛА) за пределы боковой кромки взлетно-посадочной полосы (ВПП) и расширения эксплуатационных условий на этапах взлета и посадки. Изобретение может быть использовано на современных пилотируемых и беспилотных ЛА с дистанционным управлением.
В известной литературе имеется довольно много разработок по предотвращению выкатываний ЛА на взлете и посадке за пределы ВПП в продольном направлении. Хотя, как следует из анализа статистики летных происшествий, значительная часть выкатываний связана со сходом ЛА за пределы боковой кромки ВПП из-за потери путевой устойчивости и управляемости.
Настоящие изобретения направлены на предотвращение выкатываний ЛА за пределы боковой кромки ВПП на этапах взлета и посадки путем повышения эффективности управления поворотом колес передней опоры шасси без потери путевой устойчивости движения ЛА, в том числе на покрытых неравномерно атмосферными осадками ВПП в условиях значительного бокового ветра с порывами.
На современных ЛА управление поворотом колес передней опоры шасси на взлетно-посадочных режимах обычно осуществляется отклонениями рычагов управления, связанных с педалями управления рулем направления. Причем величина отклонения колес полностью определятся положением рычагов управления. В автоматическом режиме взлета и посадки положение рычагов задается автопилотом. Как показывает опыт эксплуатации, недостатком такой схемы управления является возможность с высокой долей вероятности потеря устойчивости движения ЛА на ВПП с неоднородным состоянием поверхности в условиях бокового ветра с порывами.
Известно «Поворотное двухопорное шасси», патент US 3285541 от 15.11.1966 г., предусматривающее кроме управления поворотом колес передней опоры шасси поворот основных опор шасси на посадке для облегчения управления самолетом укороченного взлета и посадки в условиях сильного бокового ветра. Однако в этом случае существенно усложняется конструкция шасси ЛА, повышается вес шасси. Предлагаемый способ управления поворотом колес шасси не решает проблему обеспечения устойчивости бокового движения самолета на покрытых атмосферными осадками ВПП.
Известна «Система управления поворотом воздушного судна», патент РФ №2499733 от 27.11.2013, содержащая рычаг управления, скоростной гироскоп, инерциальную систему, формирующие входные параметры, блок определения скольжения колес передней опоры шасси и блок вычисления номинального значения угла поворота. Однако эта система пригодна только для малых скоростей руления и разворотов воздушного судна при отклонениях колес передней опоры шасси, значительно превышающих предельные углы поворота колес на взлетно-посадочных режимах. Система неприменима при движении ЛА по ВПП на взлете и посадке.
Известен патент US 9884679 от 6.02.2018 г. «Контроллер системы управления движения самолета на ВПП», формирующий командные отклонения колес передней опоры шасси и угловой скорости рыскания в сумме с дополнительными углами поворота колес, исходя из поперечных нагрузок в исполнительном механизме поворота колес передней опоры. Однако предлагаемая система, направленная по существу на повышение эффективности управления поворотом колес передней опоры шасси, не учитывает движения центра масс ЛА, а также боковые уводы колес основных опор шасси, определяющих динамику движения ЛА в целом. В результате при определенных условиях, например, неоднородной поверхности ВПП и низкой аэродинамической эффективности путевого управления, возможна потеря устойчивости с выкатыванием ЛА за боковую кромку ВПП. Для функционирования системы необходима установка специального датчика нагружения механизма поворота колес передней опоры шасси. Показания датчика существенно зависят от состояния поверхности полосы. Расчетные методы оценки поперечной нагрузки весьма приблизительны. Сложность системы в сочетании с необходимостью установки дополнительного датчика нагружения с учетом требований к безопасности полета делают ее реализацию применительно к этапам движения ЛА по ВПП на взлете и посадке проблематичной.
Предлагаемые изобретения направлены на достижение технического результата, заключающегося в повышении безопасности взлета и посадки, снижения аварийности из-за выкатываний за пределы боковой кромки ВПП, в расширении эксплуатационных возможностей по состоянию ВПП и боковому ветру путем обеспечения эффективного управления поворотом колес передней опоры шасси без потери устойчивости движения ЛА, в том числе в условиях бокового ветра с порывами и неоднородной по состоянию поверхности ВПП.
Для получения указанного технического результата в предлагаемой системе предотвращения бокового увода летательного аппарата с взлетно-посадочной полосы, содержащей автопилот и рычаг управления поворотом колес передней опоры шасси, связанные с сумматором (С1) через задатчик командного угла поворота колес передней опоры шасси, дополнительно введены блок расчета компенсационного угла поворота колес передней опоры шасси, потребного для парирования момента сил несимметричного торможения колес основных опор шасси и несимметричной тяги двигателей, выход которого связан с сумматором (С1), блок сигнала первый об исправности входной информации, связанный с блоком отключения сумматора (С2), связанного с блоками расчета среднего значения углов между вектором путевой скорости движения колес передней опоры шасси и проекцией продольной оси ЛА на поверхность ВПП и расчета угла поворота колес передней опоры шасси для демпфирования бокового движения ЛА на ВПП, связанных с блоком входной информации о параметрах движения центра масс ЛА по ВПП на взлете и посадке - продольной и поперечной составляющей путевой скорости ЛА, поперечной перегрузке, скорости рыскания, - выходы которого также через блок расчета среднего значения углов между вектором путевой скорости движения колес основных опор шасси и проекцией продольной оси ЛА на поверхность ВПП связаны с блоком расчета угла поворота колес передней опоры шасси для демпфирования бокового движения ЛА на ВПП; выход сумматора (С1) связан с исполнительным механизмом поворота колес передней опоры шасси; при этом блок расчета компенсационного угла поворота колес передней опоры шасси, потребного для парирования момента сил несимметричного торможения колес основных опор шасси и несимметричной тяги двигателей, включает блок уточнения нормальной составляющей взаимодействия - нормальной реакции - колес передней опоры шасси с поверхностью ВПП, входы которого соединены с выходами: блока расчета продольного момента сил торможения колес основных опор шасси, блока расчета номинального значения нормальной реакции колес передней опоры шасси, блок расчета продольного момента аэродинамических сил, обусловленных отклонениями рулей продольного управления ЛА и соответственно последовательно подключенных входами к выходам: блока входной информации о давлениях в тормозных колесах основной опоры шасси, блока входной информации о конфигурации, массе и центровке ЛА, этапе полета - взлете или посадке, блока входной информации о положении рулей продольного управления ЛА; кроме того, блок входной информации об оборотах маршевых двигателей и истинной скорости ЛА через блок расчета путевой составляющей момента тяги двигателей связан с входом блока расчета угла поворота колес передней опоры шасси для парирования момента тяги двигателей, а блок входной информации о давлениях в тормозных колесах основной опоры шасси через блок расчета путевой составляющей момента сил торможения колес основных опор шасси соединен с блоком расчета угла поворота колес передней опоры шасси для парирования момента сил торможения колес основных опор шасси; при этом блок входной информации о режимах торможения и положении рычагов управления торможением колес основных опор шасси связан с входом блока расчета угла поворота колес передней опоры шасси для парирования момента сил торможения колес основных опор шасси; блок входной информации о положении рычагов управления двигателями связан с блоком расчета угла поворота колес передней опоры шасси для парирования момента тяги двигателей, а выход блока уточнения нормальной составляющей взаимодействия - нормальной реакции - колес передней опоры шасси с поверхностью ВПП подключен к входам блока расчета угла поворота колес передней опоры шасси для парирования момента сил торможения колес основных опор шасси и блока расчета угла поворота колес передней опоры шасси для парирования момента тяги двигателей; к выходам этих двух блоков подключен блок сигнала второй об исправности входной информации по отдельности через переключатели, соединяющих их с сумматором (С3) для передачи суммарного компенсационного угла поворота колес передней опоры шасси, связанного с сумматором (С1).
Для достижения названного технического результата в предлагаемом способе предотвращения бокового увода летательного аппарата с взлетно-посадочной полосы, включающем парирование момента сил несимметричного торможения колес основных опор шасси и несимметричной тяги двигателей, использование углов поворота колес передней опоры шасси от задатчика командного управления пилотом, полученного от блока входной информации о положении рычагов управления поворотом колес передней опоры шасси или автопилота, передаваемые в сумматор (С1), дополнительно на сумматор (С1) передается сигнал от сумматора (С2), суммирующего сигналы, полученные от блока расчета угла поворота колес передней опоры шасси для демпфирования бокового движения ЛА на ВПП с учетом расчетного среднего значения углов между вектором путевой скорости движения колес основных опор шасси и проекцией продольной оси ЛА на поверхность ВПП и блока расчета среднего значения углов между вектором путевой скорости движения колес передней опоры шасси и проекцией продольной оси ЛА на поверхность ВПП, формируемые по входной информации о продольной и поперечной составляющих путевой скорости центра масс ЛА, поперечной перегрузке, скорости рыскания;
выходной сигнал сумматора (С2) отключается в случае неисправности входной информации или по команде пилота, на сумматор (С1) подается также из блока расчета через сумматор (С3) компенсационный угол поворота колес передней опоры шасси, потребный для парирования момента сил несимметричного торможения колес основных опор шасси и несимметричной тяги двигателей без измерения поперечных нагрузок на передней опоре шасси (в отличие от прототипа); эти углы рассчитываются по давлениям в тормозных колесах и оборотам двигателей с учетом путевого момента сил торможения колес, уточненной реакции колес передней опоры шасси, путевого момента тяги двигателей, режима торможения колес, положения рычагов торможения, положения рычагов управления двигателями; уточненная реакция колес передней опоры рассчитывается с учетом продольного момента сил торможения, определяемого по давлению в тормозных колесах, продольному моменту аэродинамических сил, определяемого в зависимости от положения рулей продольного управления, и нормальной реакции колес передней опоры, определяемой для фактических значений веса, центровки, конфигурации, этапа полета ЛА;
в зависимости от оборотов маршевых двигателей и истинной скорости определяется путевой момент тяги двигателей для расчета и передачи в сумматор (С3) потребного угла поворота колес передней опоры для парирования этого момента с учетом положения рычагов управления тягой двигателей; в зависимости от давления в тормозных колесах вычисляется путевой момент торможения, используемый для расчета и передачи в сумматор (С3) потребного угла поворота колес передней опоры для парирования этого момента с учетом режима торможения и положения рычагов управления торможением колес основных опор шасси;
компенсационные значения углов поворота колес передней опоры шасси для парирования момента сил торможения колес основных опор шасси и несимметричной тяги двигателей отключаются по сигналу неисправности входной информации по давлению на тормозах, конфигурации, весу, центровки, этапу полета, положению рулей, обороту двигателей и истинной скорости ЛА или по команде пилота и не поступают в сумматор С3, связанный с сумматором С1.
Таким образом, описанные способ и система предотвращения бокового увода с ВПП основаны на использовании информации и вычислителей, имеющихся на борту современных ЛА. Установка дополнительных средств измерения в отличие от прототипа не требуется. Наличие блоков об исправности входной информации и отключения элементов управления предлагаемой системы позволяет снизить уровень ее критичности и тем самым сократить расходы на ее реализацию при сохранении безопасности системы управления поворотом колес передней опоры шасси в целом.
Предлагаемые изобретения иллюстрируются чертежами, на которых изображены:
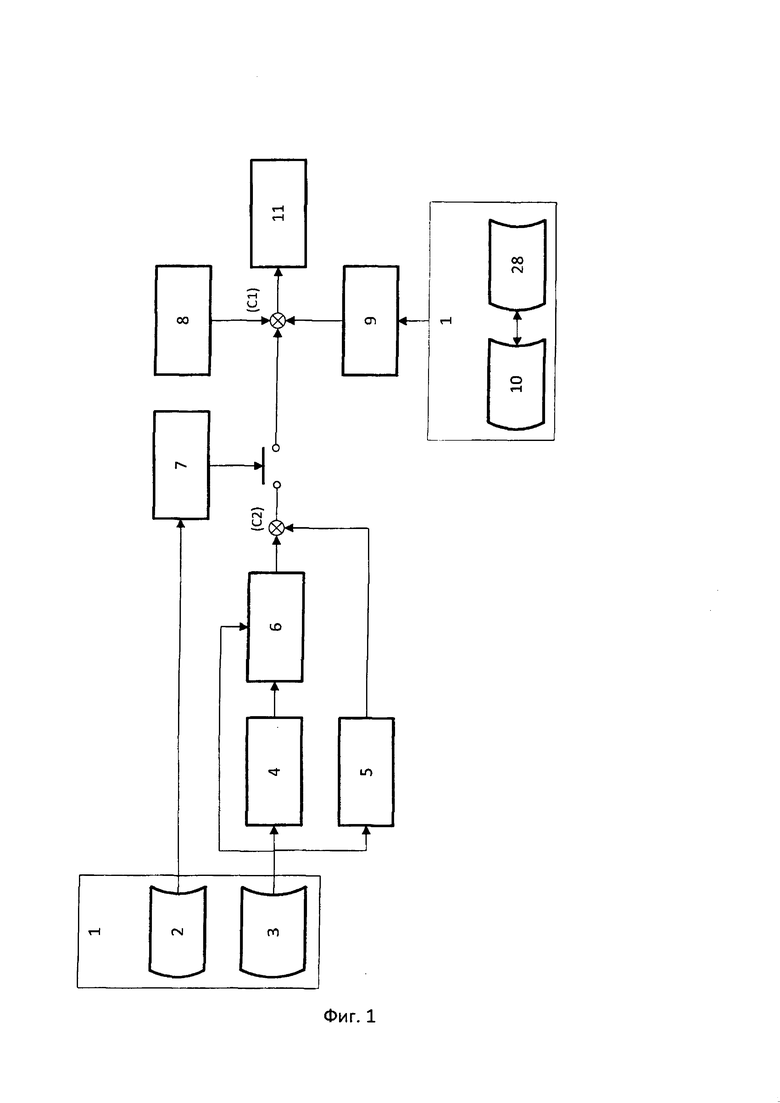
на фиг. 1 - схема системы управления поворотом колес шасси ЛА для осуществления предложенного способа;
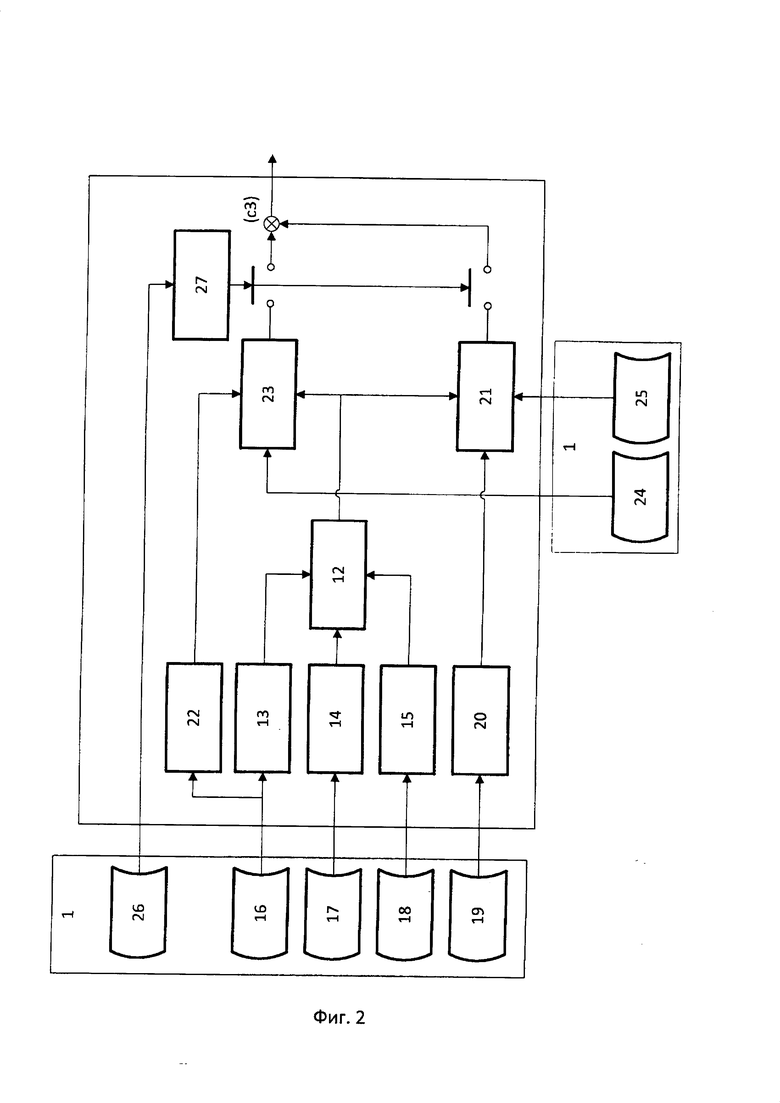
на фиг. 2 - схема расчета компенсационного угла поворота колес передней опоры шасси, потребного для парирования момента сил несимметричного торможения колес основных опор шасси и несимметричной тяги двигателей,
где:
1 - блоки входной информации;
2 -блок сигнала первый об исправности входной информации;
3 - блок входной информации о продольной и поперечной составляющих путевой скорости центра масс ЛА, поперечной перегрузке и угловой скорости рыскания ЛА;
4 - блок расчета среднего значения углов между вектором путевой скорости движения колес основных опор шасси и проекцией продольной оси ЛА на поверхность ВПП;
5 - блок расчета среднего значения углов между вектором путевой скорости движения колес передней опоры шасси и проекцией продольной оси ЛА на поверхность ВПП;,
6 - блок расчета угла поворота колес передней опоры шасси для демпфирования бокового движения ЛА на ВПП;
7 - блок отключения;
8 - блок расчета компенсационного угла поворота колес передней опоры шасси, потребного для парирования момента сил несимметричного торможения колес основных опор шасси и несимметричной тяги двигателей;
9 - задатчик командного угла поворота колес передней опоры шасси;
10 - автопилот;
11 - исполнительный механизм поворота колес передней опоры шасси;
12 - блок уточнения нормальной составляющей взаимодействия - нормальной реакции - колес передней опоры шасси с поверхностью ВПП;
13 - блок расчета продольного момента сил торможения колес основных опор шасси;
14 - блок расчета номинального значения нормальной реакции колес передней опоры шасси;
15 - блок расчета продольного момента аэродинамических сил, обусловленных отклонениями рулей продольного управления ЛА;
16 - блок входной информации о давлениях в тормозных колесах основной опоры шасси;
17 - блок входной информации о конфигурации, массе и центровке ЛА, этапе полета - взлете или посадке;
18 - блок входной информации о положении рулей продольного управления ЛА;
19 - блок входной информации об оборотах маршевых двигателей и истинной скорости ЛА;
20 - блок расчета путевой составляющей момента тяги двигателей;
21 - блок расчета угла поворота колес передней опоры шасси для парирования момента тяги двигателей;
22 - блок расчета путевой составляющей момента сил торможения колес основных опор шасси;
23 - блок расчета угла поворота колес передней опоры шасси для парирования момента сил торможения колес основных опор шасси;
24 - блок входной информации о режимах торможения и положении рычагов управления торможением колес основных опор шасси;
25 - блок входной информации о положении рычагов управления двигателями;
26 - блок сигнала второй об исправности входной информации;
27 - блок отключения расчетов угла поворота колес передней опоры шасси для парирования момента тяги двигателей и поворота колес передней опоры шасси для парирования момента сил торможения колес основных опор шасси;
28 - блок входной информации о положении рычагов управления поворотом колес передней опоры шасси.
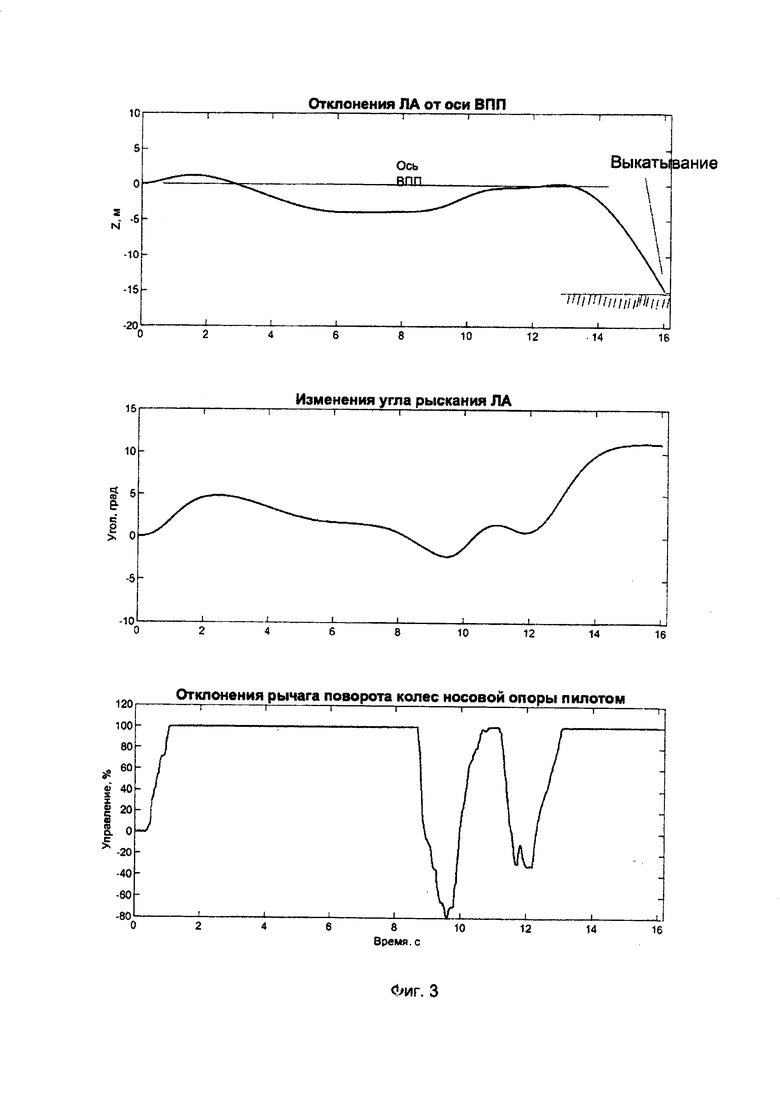
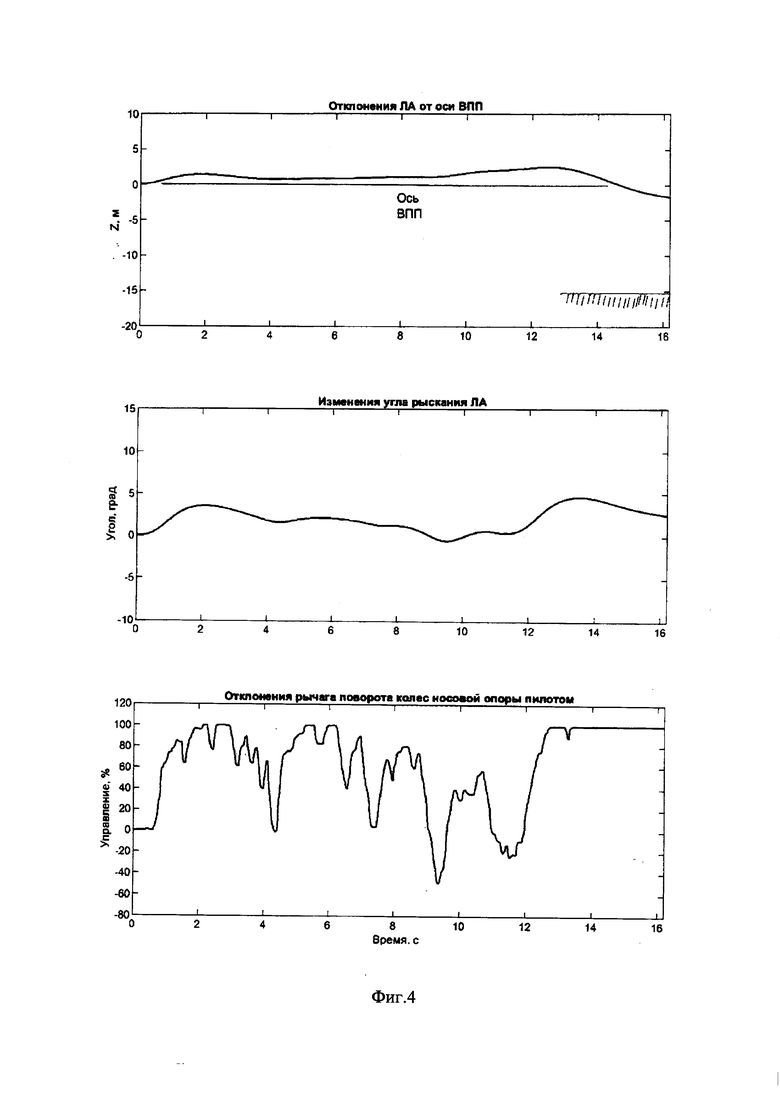
На фиг. 3 и 4 представлены примеры движения ЛА на послепосадочном пробеге с обычной системой управления и предлагаемой системой управления заявленным способом.
Предлагаемая система для предотвращения бокового увода ЛА с ВПП содержит (фиг. 1, 2) блоки входной информации 1, блок сигнала первый об исправности входной информации 2 в блоке 3. Блок 2 связан с блоком 7 отключения сумматора (С2) от сумматора (С1). Выходы блока входной информации о продольной и поперечной составляющих путевой скорости центра масс ЛА, поперечной перегрузке и угловой скорости рыскания ЛА 3 связаны с блоком расчета среднего значения углов между вектором путевой скорости движения колес основных опор шасси и проекцией продольной оси ЛА на поверхность ВПП 4, с блоком расчета угла поворота колес передней опоры шасси для демпфирования бокового движения ЛА на ВПП 6, и с входом блока расчета среднего значения углов между вектором путевой скорости движения колес передней опоры шасси и проекцией продольной оси ЛА на поверхность ВПП 5. Выход блока 4 связан с блоком 6. Выходы блоков 5 и 6 связаны с сумматором (С2), формирующим демпфирующее значение угла поворота колес передней опоры шасси относительно их направления движения по ВПП и передающим его в сумматор (С1).
Автопилот 10 и блок входной информации о положении рычагов управления поворотом колес передней опоры шасси 28 через задатчик командного угла поворота колес передней опоры шасси 9 соединен с сумматором (С1), с которым соединен также блок расчета компенсационного угла поворота колес передней опоры шасси, потребного для парирования момента сил несимметричного торможения колес основных опор шасси и несимметричной тяги двигателей 8. Выход сумматора С1 подключен к входу исполнительного механизма носового колеса рулевого управления носового колеса 11.
Блок уточнения нормальной составляющей взаимодействия - нормальной реакции - колес передней опоры шасси с поверхностью ВПП 12 выполнен с входами, соединенными с выходами: блока расчета продольного момента сил торможения колес основных опор шасси 13, блока расчета номинального значения номинальной реакции колес передней опоры шасси 14, блока расчета продольного момента аэродинамических сил, обусловленных отклонениями рулей продольного управления ЛА, 15 и соответственно последовательно подключенных входами к выходам: блока входной информации о давлениях в тормозных колесах основной опоры шасси 16, блока входной информации о конфигурации, массе, центровки, этапа полета взлета и посадки 17, блока входной информации о положении рулей продольного управления ЛА 18. Блок входной информации об оборотах маршевых двигателей и истинной скорости 19 через блок расчета путевой составляющей момента тяги двигателей связан с входом блока расчета угла поворота колес передней опоры шасси для парирования момента тяги двигателей 21. Блок входной информации о давлениях в тормозных колесах 16 через блок расчета путевой составляющей момента сил торможения колес основных опор шасси 22 соединен с блоком расчета угла поворота колес передней опоры шасси для парирования момента сил торможения колес основных опор шасси 23. Блок входной информации о режимах торможения и положении рычагов управления торможением колес основных опор шасси 24, связан с входом блок расчета угла поворота колес передней опоры шасси для парирования момента сил торможения колес основных опор шасси для парирования момента сил торможения основных опор шасси 23, а блок входной информации о положении рычагов управления двигателями 25 связан с блоком расчета угла поворота носового колеса передней опоры шасси для парирования путевого момента тяги двигателей 21. Выход блока уточнения нормальной составляющей взаимодействия - нормальной реакции - колес передней опоры шасси с поверхностью ВПП 12 подключен к входам блока расчета угла поворота колес передней опоры шасси для парирования путевого момента сил торможения 23 и блока расчета угла поворота колес передней опоры шасси для парирования момента тяги двигателей 21. Блок сигнала второй об исправности входной информации 26 по отдельности связан с блоками 23 и 21 через блок отключения расчетов угла поворота колес передней опоры шасси для парирования момента сил торможения колес основных опор шасси и тяги двигателей 27 через переключатели, соединенными с сумматором (С3) для определения суммарного компенсационного угла поворота колес передней опоры шасси, связанного с сумматором (С1).
Система работает следующим образом.
Для предотвращения бокового увода ЛА с ВПП, обусловленного потерей устойчивости и управляемости движения ЛА на ВПП, заявленная система обеспечивает через задатчик 9 командное отклонение колес передней опоры шасси, формируемое автопилотом (блок 10) или рычагом управления поворотом колес передней опоры шасси (блок 28), дополненное отклонениями колес передней опоры шасси в сумматоре С1, формируемыми блоками 5, 6, 8.
Блок 6 представляет собой демпфер бокового движения ЛА на ВПП. Входными сигналами блока является угловая скорость рыскания, поперечная перегрузка с блока 3 и среднее значение углов между вектором путевой скорости движения колес основных опор шасси и проекцией продольной оси ЛА на поверхность ВПП с блока 4. Выходной сигнал в блоке 4 рассчитывается по значениям продольной, поперечной составляющих скорости центра масс ЛА, угловой скорости рыскания, получаемых с блока 3, а также проекции на ВПП расстояний от центра масс ЛА до оси вращения колес основных опор шасси. В качестве простейшего демпфера могут быть использованы, например, инерционные звенья или изодромные звенья с коэффициентами усиления угловой скорости рыскания, поперчной перегрузки.
В блоке 5 формируется значение угла между проекцией оси самолета на ВПП и путевой скоростью движения колес передней опоры шасси. Расчет угла производится по значениям угловой скорости рыскания, путевой скорости центра масс ЛА, поставляемых блоком 3, а также проекции на ВПП расстояний от центра масс ЛА до оси вращения колес передней опоры шасси.
Блок 8 формирует сигнал для поворота колес передней опоры шасси для парирования момента рыскания из-за различий в силах трения колес основных опор шасси. Сигнал формируется в блоке 23 по значениям путевого момента сил торможения колес, определяемого в блоке 22, и уточненной нормальной реакции колес носовой опоры шасси, определяемой в блоке 12. Путевой момент сил торможения колес в блоке 22 рассчитывается по рассогласованию осредненных значений давлений в тормозах опор шасси, поставляемых блоком 16.
Рассогласование давлений в тормозах учитывается только при автоматическом торможении колес основных опор шасси и симметричном положении рычагов управления торможением колес при управлении пилотом. В случае дифференцированного торможения колес рассогласование давлений, выдаваемое блоком 16, обнуляется. Расчет реакции носовой опоры шасси, выдаваемой блоком 12, определяется по значениям номинальной реакции колес носовой опоры шасси, определяемой блоком 14 в зависимости от конфигурации, веса, центровки и этапа полета (взлет или посадка) из блока 17. При этом учитываются продольный момент сил торможения колес основных отпор шасси, рассчитываемый в блоке 13 по значениям давления в тормозных колесах из блока 16, и продольный момент аэродинамических сил, рассчитываемый в блоке 15 по положению рулей продольного управления из блока 18.
Блок 21 формирует потребные отклонения колес передней опоры шасси по значениям путевого момента тяги двигателей, определяемого блоком 20 по значениям оборотов в маршевых двигателях и истинной скорости ЛА, получаемых с блока 19. В блоке 21 учитывается уточненная в блоке 12 реакция колес носовой опоры шасси. Расчет выходного сигнала блока 21 осуществляется лишь при симметричном положении рычагов управления двигателями, в противном случае сигнал обнуляется. Информацию о положении рычагов управления двигателями поставляет блок 25.
Значения отклонений носового колеса для парирования путевого момента сил торможения колес (блок 23) и несимметричной тяги (блок 21) поступают в сумматор (С3) и далее в сумматор (С1). Выходы блоков 23 и 21 обнуляются независимо блоком отключения 27 по сигналу исправности соответствующей входной информации с блока 26 либо пилотом.
Суммарное значение сигналов, выдаваемых блоками 5, 6, 8, 9, от сумматора С1 подается на исполнительный механизм поворота колес передней опоры шасси 11.
Пример.
На фиг. 3 показаны параметры движения ЛА с обычной системой управления поворотом колес передней опоры шасси по ВПП, покрытой атмосферными осадками, в условиях интенсивного бокового ветра с порывами. Отклонения рычага поворота колес передней опоры шасси пилотом представлены в процентах относительно предельного отклонения. ЛА выкатывается за пределы боковой кромки ВПП несмотря на полное отклонение рычагов управления. С заявленной системой управления в тех же условиях посадки, как видно из графиков на фиг. 4, ЛА не выкатывается с ВПП. Наличие демпфера в системе обеспечивает устойчивую траекторию движения ЛА. При этом расходы рычага управления поворотом колес передней опоры шасси заметно снижаются.
Таким образом, технический результат достигается путем эффективного управления поворотом колес передних опор шасси, обеспечивающего устойчивое движение ЛА при всех состояниях ВПП, в том числе неоднородных с неравномерно покрытыми атмосферными осадками поверхностями, в условиях значительного бокового ветра с порывами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения в лётных испытаниях тормозного момента и энергонагруженности колёс шасси летательного аппарата на пробеге по взлётно-посадочной полосе | 2022 |
|
RU2792467C1 |
| Способ мониторинга технического состояния планера и шасси летательного аппарата и устройство для его осуществления | 2017 |
|
RU2678540C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ОДНОМЕСТНЫЙ САМОЛЕТ С КОМПЛЕКСНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2016 |
|
RU2630030C1 |
| СПОСОБ ДОПОЛНИТЕЛЬНОГО ТОРМОЖЕНИЯ КОЛЕС ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2502638C2 |
| Способ и система управления продольным движением при разбеге по взлётно-посадочной полосе и наборе высоты беспилотного летательного аппарата со специально расположенными передними и задними крыльями | 2018 |
|
RU2695897C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА ПРЕРВАННОМ ВЗЛЕТЕ САМОЛЕТА | 2024 |
|
RU2837365C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ОПУСКАНИЕМ ПЕРЕДНЕЙ СТОЙКИ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПРОБЕГЕ ПО ПОВЕРХНОСТИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 1992 |
|
RU2036821C1 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
Для предотвращения бокового увода летательного аппарата с взлетно-посадочной полосы парируют момент сил несимметричного торможения колес основных опор шасси и несимметричной тяги двигателей с учетом информации о давлении в тормозных колесах и оборотах двигателей, путевом моменте сил торможения колес, моменте аэродинамических сил, обусловленных отклонениями рулей продольного управления ЛА, реакции колес передней опоры шасси, путевом моменте тяги двигателей, режиме торможения колес, положении рычагов торможения, положении рычагов управления двигателями. Система содержит автопилот, исполнительный механизм поворота колес передней опоры шасси, блоки необходимой для проведения расчетов входной информации, блоки расчета параметров, необходимых для реализации вышеуказанного способа, блоки сигналов об исправности входной информации, блоки отключения расчетов. Обеспечивается повышение эффективности управления поворотом передней опоры шасси без потери устойчивости движения летательного аппарата при внешних воздействиях. 2 н.п. ф-лы, 4 ил.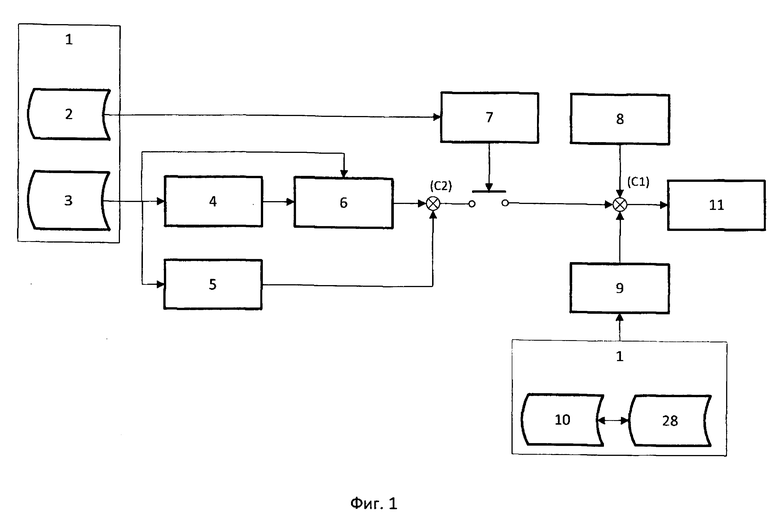
1. Система предотвращения бокового увода летательного аппарата с взлетно-посадочной полосы, содержащая автопилот и рычаг управления поворотом колес передней опоры шасси, связанные с сумматором (С1) через задатчик командного угла поворота колес передней опоры шасси, отличающаяся тем, что дополнительно введены блок расчета компенсационного угла поворота колес передней опоры шасси, потребного для парирования момента сил несимметричного торможения колес основных опор шасси и несимметричной тяги двигателей, выход которого связан с сумматором (С1), блок сигнала первый об исправности входной информации, связанный с блоком отключения сумматора (С2), связанного с блоками расчета среднего значения углов между вектором путевой скорости движения колес передней опоры шасси и проекцией продольной оси ЛА на поверхность ВПП и расчета угла поворота колес передней опоры шасси для демпфирования бокового движения ЛА на ВПП, связанных с блоком входной информации о параметрах движения центра масс ЛА по ВПП на взлете и посадке - продольной и поперечной составляющей путевой скорости ЛА, поперечной перегрузке, скорости рыскания, - выходы которого также через блок расчета среднего значения углов между вектором путевой скорости движения колес основных опор шасси и проекцией продольной оси ЛА на поверхность ВПП связаны с блоком расчета угла поворота колес передней опоры шасси для демпфирования бокового движения ЛА на ВПП; выход сумматора (С1) связан с исполнительным механизмом поворота колес передней опоры шасси; при этом блок расчета компенсационного угла поворота колес передней опоры шасси, потребного для парирования момента сил несимметричного торможения колес основных опор шасси и несимметричной тяги двигателей, включает блок уточнения нормальной составляющей взаимодействия - нормальной реакции - колес передней опоры шасси с поверхностью ВПП, входы которого соединены с выходами: блока расчета продольного момента сил торможения колес основных опор шасси, блока расчета номинального значения нормальной реакции колес передней опоры шасси, блок расчета продольного момента аэродинамических сил, обусловленных отклонениями рулей продольного управления ЛА и соответственно последовательно подключенных входами к выходам: блока входной информации о давлениях в тормозных колесах основной опоры шасси, блока входной информации о конфигурации, массе и центровке ЛА, этапе полета - взлете или посадке, блока входной информации о положении рулей продольного управления ЛА; кроме того, блок входной информации об оборотах маршевых двигателей и истинной скорости ЛА через блок расчета путевой составляющей момента тяги двигателей связан с входом блока расчета угла поворота колес передней опоры шасси для парирования момента тяги двигателей, а блок входной информации о давлениях в тормозных колесах основной опоры шасси через блок расчета путевой составляющей момента сил торможения колес основных опор шасси соединен с блоком расчета угла поворота колес передней опоры шасси для парирования момента сил торможения колес основных опор шасси; при этом блок входной информации о режимах торможения и положении рычагов управления торможением колес основных опор шасси связан с входом блока расчета угла поворота колес передней опоры шасси для парирования момента сил торможения колес основных опор шасси; блок входной информации о положении рычагов управления двигателями связан с блоком расчета угла поворота колес передней опоры шасси для парирования момента тяги двигателей, а выход блока уточнения нормальной составляющей взаимодействия - нормальной реакции - колес передней опоры шасси с поверхностью ВПП подключен к входам блока расчета угла поворота колес передней опоры шасси для парирования момента сил торможения колес основных опор шасси и блока расчета угла поворота колес передней опоры шасси для парирования момента тяги двигателей; к выходам этих двух блоков подключен блок сигнала второй об исправности входной информации по отдельности через переключатели, соединяющих их с сумматором (С3) для передачи суммарного компенсационного угла поворота колес передней опоры шасси, связанного с сумматором (С1).
2. Способ предотвращения бокового увода летательного аппарата с взлетно-посадочной полосы, включающий парирование момента сил несимметричного торможения колес основных опор шасси и несимметричной тяги двигателей, использование углов поворота колес передней опоры шасси от задатчика командного управления пилотом, полученного от блока входной информации о положении рычагов управления поворотом колес передней опоры шасси или автопилота, передаваемые в сумматор (С1), отличающийся тем, что дополнительно на сумматор (С1) передается сигнал от сумматора (С2), суммирующего сигналы, полученные от блока расчета угла поворота колес передней опоры шасси для демпфирования бокового движения ЛА на ВПП с учетом расчетного среднего значения углов между вектором путевой скорости движения колес основных опор шасси и проекцией продольной оси ЛА на поверхность ВПП и блока расчета среднего значения углов между вектором путевой скорости движения колес передней опоры шасси и проекцией продольной оси ЛА на поверхность ВПП, формируемые по входной информации о продольной и поперечной составляющих путевой скорости центра масс ЛА, поперечной перегрузке, скорости рыскания;
выходной сигнал сумматора (С2) отключается в случае неисправности входной информации или по команде пилота, на сумматор (С1) подается также из блока расчета через сумматор (С3) компенсационный угол поворота колес передней опоры шасси, потребный для парирования момента сил несимметричного торможения колес основных опор шасси и несимметричной тяги двигателей, эти углы рассчитываются по давлениям в тормозных колесах и оборотам двигателей с учетом путевого момента сил торможения колес, уточненной реакции колес передней опоры шасси, путевого момента тяги двигателей, режима торможения колес, положения рычагов торможения, положения рычагов управления двигателями; уточненная реакция колес передней опоры рассчитывается с учетом продольного момента сил торможения, определяемого по давлению в тормозных колесах, продольному моменту аэродинамических сил, определяемого в зависимости от положения рулей продольного управления, и нормальной реакции колес передней опоры, определяемой для фактических значений веса, центровки, конфигурации, этапа полета ЛА;
в зависимости от оборотов маршевых двигателей и истинной скорости определяется путевой момент тяги двигателей для расчета и передачи в сумматор (С3) потребного угла поворота колес передней опоры для парирования этого момента с учетом положения рычагов управления тягой двигателей; в зависимости от давления в тормозных колесах вычисляется путевой момент торможения, используемый для расчета и передачи в сумматор (С3) потребного угла поворота колес передней опоры для парирования этого момента с учетом режима торможения и положения рычагов управления торможением колес основных опор шасси;
компенсационные значения углов поворота колес передней опоры шасси для парирования момента сил торможения колес основных опор шасси и несимметричной тяги двигателей отключаются по сигналу неисправности входной информации по давлению на тормозах, конфигурации, весу, центровки, этапу полета, положению рулей, обороту двигателей и истинной скорости ЛА или по команде пилота и не поступают в сумматор С3, связанный с сумматором С1.
| US 20170158316 A1, 08.06.2017 | |||
| US 0006722610 B1, 20.04.2004 | |||
| US 20190168864 A1, 06.06.2019 | |||
| US 0005242131 A1, 07.09.1993 | |||
| МНОГОФУНКЦИОНАЛЬНЫЙ ОДНОМЕСТНЫЙ САМОЛЕТ С КОМПЛЕКСНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2016 |
|
RU2630030C1 |

