Изобретение относится к области бортового оборудования, предназначено для установки на летательные аппараты (ЛА) и может быть использовано для функционального диагностирования технического состояния авиационного оборудования и повышения безопасности полётов ЛА.
Известна система поддержки экипажа в опасных ситуациях [1], которая содержит датчик состояния двигателей, топливной системы, гидросистему, систему электроснабжения, систему штурвального управления, систему выпуска шасси и торможения, систему жизнеобеспечения, противообледенительную систему, противопожарную систему, блок распознавания состояния конфигурации ЛА, блок распознавания режимов полёта, анализатор состояния пилотажно-навигационного оборудования, анализатор состояния аппаратуры ЛА, блок распознавания аварийной ситуации, блок прогноза состояний, состоящий из связанных блоков моделирования динамики ЛА и базу знаний (БЗ) развития аварийных ситуаций (АС), связанных друг с другом БЗ характеристик АС и БЗ предотвращения АС, вычислитель принятия решений о предотвращении АС, анализатор правильности действий по предотвращению АС, вычислитель принятия решений о переходе на автоматическое управление, блок предупреждения о нарушении правильности действий.
Недостатком данной системы является то, что она не позволяет повысить уровень безопасности полёта ЛА при возникновении особых ситуаций, вызванных отказом систем и агрегатов ЛА и ошибочными действиями экипажа, за счёт отсутствия на ЛА систем, обеспечивающих экипаж сигналами о приближении к предельно допустимым значениям полёта, являющимся для экипажа командой для выполнения корректирующих действий по предотвращению выхода на критический режим полёта, а также выполнения необходимых действий на этапах взлета и посадки ЛА.
Известна интеллектуальная система поддержки экипажа (ИСПЭ) [2], включающая датчики состояния двигателей, топливной системы, гидросистемы, системы электроснабжения, системы выпуска шасси и торможения, противообледенительной системы, противопожарной системы, системы воздушных сигналов (СВС), спутниковую навигационную систему (СНС), инерциальную навигационную систему (ИНС), радиовысотомер (PB), приборную систему посадки (ПСП), систему штурвального управления (СШУ), параллельно соединённые с системой сбора бортовой информации (ССБИ), систему отображения информации (СОИ), блок распознавания аварийных ситуаций (БРАС), систему контроля разбега (СКР), систему предупреждения об опасной близости земли (СПОБЗ), систему предупреждения о выходе на опасные значения угла атаки и перегрузки (СПВОЗ), систему контроля захода на посадку и посадки (СКЗП), систему предупреждения о попадании в сдвиг ветра (СППСВ). При этом СКР выполнена с возможностью определять на основе измерений параметров сигналов бортовых датчиков значения – продольной  и нормальной
и нормальной  перегрузок; воздушной
перегрузок; воздушной  и приборной
и приборной  скоростей; углов тангажа
скоростей; углов тангажа  ; расстояний
; расстояний  пройденного пути ВПП с учётом заданных ограничений, собранных в ССБИ; превышений
пройденного пути ВПП с учётом заданных ограничений, собранных в ССБИ; превышений  ,
,  ,
,  измеренных и заданных пороговых значений параметров в виде:
измеренных и заданных пороговых значений параметров в виде:
 ,
,  ,
,  ,
,
где:  ,
, – расчётное и пороговое значения дистанции достижения скорости отрыва ЛА от поверхности ВПП;
– расчётное и пороговое значения дистанции достижения скорости отрыва ЛА от поверхности ВПП; – расстояние, пройденное ЛА по ВПП;
– расстояние, пройденное ЛА по ВПП;  ,
,  – пороговое значение воздушной скорости и приборная скорость;
– пороговое значение воздушной скорости и приборная скорость;  – пороговое значение продольной перегрузки; а также сигналы скорости набора или потери высоты, которые подаются в БРАС для формирования информации о качестве разбега и предупреждения об опасности и передачи в СОИ и индикации включения тревожной сигнализации. Система СПОБЗ выполнена с возможностью определять на основе измерения параметров сигналов бортовых датчиков, указывающих географическое место положение летательного аппарата (ЛА), высоту, показываемую радиовысотомером
– пороговое значение продольной перегрузки; а также сигналы скорости набора или потери высоты, которые подаются в БРАС для формирования информации о качестве разбега и предупреждения об опасности и передачи в СОИ и индикации включения тревожной сигнализации. Система СПОБЗ выполнена с возможностью определять на основе измерения параметров сигналов бортовых датчиков, указывающих географическое место положение летательного аппарата (ЛА), высоту, показываемую радиовысотомером  , геодезическую высоту
, геодезическую высоту  спутниковой навигационной системы (СНС), данных измерителя вертикальной скорости
спутниковой навигационной системы (СНС), данных измерителя вертикальной скорости ЛА, приёмника сигналов
ЛА, приёмника сигналов отклонения от радиотехнической глиссады посадки, внутренней базы данных о местности и препятствиях в аэропортах – минимальное значение допустимой высоты над землёй в экстремальных условиях атмосферы для передачи в БРАС с целью формирования информации принятия решения об условиях близости поверхности земли, после чего информационные сигналы поступают в СОИ для индикации включения тревожной сигнализации. Система СПВОЗ выполнена с возможностью измерения параметров бортовых датчиков угла атаки
отклонения от радиотехнической глиссады посадки, внутренней базы данных о местности и препятствиях в аэропортах – минимальное значение допустимой высоты над землёй в экстремальных условиях атмосферы для передачи в БРАС с целью формирования информации принятия решения об условиях близости поверхности земли, после чего информационные сигналы поступают в СОИ для индикации включения тревожной сигнализации. Система СПВОЗ выполнена с возможностью измерения параметров бортовых датчиков угла атаки  , угла крена
, угла крена  , нормальной перегрузки , угловой скорости тангажа
, нормальной перегрузки , угловой скорости тангажа  ;определения предельно допустимых разностей между опасными и пороговыми значениями по параметрам сигналов угла атаки и его производной
;определения предельно допустимых разностей между опасными и пороговыми значениями по параметрам сигналов угла атаки и его производной , сигнал о величине вертикальной перегрузки и её производной
, сигнал о величине вертикальной перегрузки и её производной  , сигналов допустимых значений угла атаки
, сигналов допустимых значений угла атаки  , сигнал о величине допустимых значений продольной перегрузки
, сигнал о величине допустимых значений продольной перегрузки  , зависящих от числа Маха
, зависящих от числа Маха  и массы ЛА; фильтрации сигналов угловой скорости , передаваемых в БРАС для формирования информации предупреждения о выходе на опасные углы атаки и перегрузки. После чего сигналы подаются в СОИ для индикации включения тревожной сигнализации. Система СКЗП выполнена с возможностью на основе измерения параметров сигналов бортовых датчиков отклонения в пространстве траектории ЛА, выдаваемых приёмником курсоглиссадных радиомаяков, бортовой спутниковой навигационной системы (СНС), датчиком радиовысотомера , датчиком барометрической высоты
и массы ЛА; фильтрации сигналов угловой скорости , передаваемых в БРАС для формирования информации предупреждения о выходе на опасные углы атаки и перегрузки. После чего сигналы подаются в СОИ для индикации включения тревожной сигнализации. Система СКЗП выполнена с возможностью на основе измерения параметров сигналов бортовых датчиков отклонения в пространстве траектории ЛА, выдаваемых приёмником курсоглиссадных радиомаяков, бортовой спутниковой навигационной системы (СНС), датчиком радиовысотомера , датчиком барометрической высоты , датчиком воздушной скорости , положения шасси и закрылков в БРАС, формировать сигналы принятия решений об условиях выхода за пределы допустимых отклонений, передаваемых в СОИ для индикации включения тревожной сигнализации, в директорные приборы и блок включения систем автоматического управления (САУ). Система СППСВ выполнена с возможностью на основе измерения параметров бортовых датчиков приборной скорости и её производной, вертикальной скорости , приращения углов атаки
, датчиком воздушной скорости , положения шасси и закрылков в БРАС, формировать сигналы принятия решений об условиях выхода за пределы допустимых отклонений, передаваемых в СОИ для индикации включения тревожной сигнализации, в директорные приборы и блок включения систем автоматического управления (САУ). Система СППСВ выполнена с возможностью на основе измерения параметров бортовых датчиков приборной скорости и её производной, вертикальной скорости , приращения углов атаки  , определять превышения измеренных и заданных значений при попадании ЛА в условия сдвига ветра; формировать в БРАС сигнал принятия решения о критичности условий попадания в сдвиг ветра, передавая их в СОИ для индикации включения тревожной сигнализации. Входы перечисленных систем вместе с первым входом БРАС соединены с выходами ССБИ. Выходы указанных систем соединены со вторыми входами БРАС, а выход его подключён к СОИ, установленной перед лётчиком экипажа, взаимодействующего с СШУ. Кроме того, структура БРАС построена в виде двухуровневой системы, в которой на первом уровне распознавания реализуют контроль состояния ЛА и режимов работы его подсистем, а на втором уровне распознавания проводят контроль отказов, контроль за выполнением режимов полёта, контроль критических значений параметров полёта. Таким образом, ИСПЭ является управляющей системой с параллельной оценкой работоспособности бортового оборудования, работы экипажа, прогнозирования аварийных ситуаций, условий полёта и выработки рекомендаций вывода из опасных ситуаций за пределом области эксплуатационных ограничений. ИСПЭ оценивает состояние всех систем ЛА.
, определять превышения измеренных и заданных значений при попадании ЛА в условия сдвига ветра; формировать в БРАС сигнал принятия решения о критичности условий попадания в сдвиг ветра, передавая их в СОИ для индикации включения тревожной сигнализации. Входы перечисленных систем вместе с первым входом БРАС соединены с выходами ССБИ. Выходы указанных систем соединены со вторыми входами БРАС, а выход его подключён к СОИ, установленной перед лётчиком экипажа, взаимодействующего с СШУ. Кроме того, структура БРАС построена в виде двухуровневой системы, в которой на первом уровне распознавания реализуют контроль состояния ЛА и режимов работы его подсистем, а на втором уровне распознавания проводят контроль отказов, контроль за выполнением режимов полёта, контроль критических значений параметров полёта. Таким образом, ИСПЭ является управляющей системой с параллельной оценкой работоспособности бортового оборудования, работы экипажа, прогнозирования аварийных ситуаций, условий полёта и выработки рекомендаций вывода из опасных ситуаций за пределом области эксплуатационных ограничений. ИСПЭ оценивает состояние всех систем ЛА.
Недостатком данной системы является недостаточная безопасность ЛА при его взлёте, посадке и движении по аэродрому.
Наиболее близким техническим решением к заявляемому является интеллектуальная система поддержки экипажа (ИСПЭ) [3], включающая датчики состояния двигателей, топливной системы, гидросистемы, системы электроснабжения, системы выпуска шасси и торможения, противообледенительной системы, противопожарной системы, системы воздушных сигналов (СВС), спутниковую навигационную систему (СНС), инерциальную навигационную систему (ИНС), радиовысотомер (РВ), приборную систему посадки (ПСП), систему штурвального управления (СШУ), параллельно соединённые с системой сбора бортовой информации (ССБИ), систему отображения информации (СОИ), блок распознавания аварийных ситуаций (БРАС), систему контроля разбега (СКР), систему предупреждения об опасной близости земли (СПОБЗ), систему предупреждения о выходе на опасные значения угла атаки и перегрузки (СПВОЗ), систему контроля захода на посадку и посадки (СКЗП), систему предупреждения о попадании в сдвиг ветра (СППСВ), при этом СКР выполнена с возможностью определения, на основе измерения параметров сигналов бортовых датчиков – продольной и нормальной перегрузок; воздушной  и приборной скоростей; углов тангажа ; расстояний
и приборной скоростей; углов тангажа ; расстояний  пройденного пути ВПП с учётом заданных ограничений, собранных в ССБИ; превышений , , измеренных и заданных пороговых значений параметров в виде:
пройденного пути ВПП с учётом заданных ограничений, собранных в ССБИ; превышений , , измеренных и заданных пороговых значений параметров в виде:
, , ,
где: , – расчётное и пороговое значения дистанции достижения скорости отрыва ЛА от поверхности ВПП; – расстояние, пройденное ЛА по ВПП; , – пороговое значение воздушной скорости и приборная скорость; – пороговое значение продольной перегрузки; а также сигналы скорости набора или потери высоты, которые подаются в БРАС для формирования информации о качестве разбега и предупреждения об опасности и передачи в СОИ и индикации включения тревожной сигнализации. Система СПОБЗ выполнена с возможностью определять на основе измерения параметров сигналов бортовых датчиков, указывающих географическое местоположение ЛА, высоту, показываемую радиовысотомером , геодезическую высоту спутниковой навигационной системы (СНС), данных измерителя вертикальной скорости ЛА, приёмника сигналов отклонения от радиотехнической глиссады посадки, внутренней базы данных о местности и препятствиях в аэропортах – минимальное значение допустимой высоты над землёй в экстремальных условиях атмосферы для передачи в БРАС с целью формирования информации принятия решения об условиях близости поверхности земли, после чего информационные сигналы поступают в СОИ для индикации включения тревожной сигнализации. Система СПВОЗ выполнена с возможностью измерения параметров бортовых датчиков угла атаки,угла крена, нормальной перегрузки,угловой скорости тангажа ;определения предельно допустимых разностей между опасными и пороговыми значениями по параметрам сигналов угла атаки и его производной  ,сигналов вертикальной перегрузкии её производной
,сигналов вертикальной перегрузкии её производной  , сигналов допустимых значений угла атаки ,сигналов допустимых значений продольной перегрузки
, сигналов допустимых значений угла атаки ,сигналов допустимых значений продольной перегрузки  ,зависящих от числа Маха и массы ЛА; фильтрации сигналов угловой скорости ,передаваемых в БРАС для формирования информации предупреждения о выходе на опасные углы атаки и перегрузки. После чего сигналы подаются в СОИ для индикации включения тревожной сигнализации. Система СКЗП выполнена с возможностью на основе измерения параметров сигналов бортовых датчиков отклонения в пространстве траектории ЛА, выдаваемых приёмником курсоглиссадных радиомаяков, бортовой спутниковой навигационной системы (СНС), датчиком радиовысотомера ,датчиком барометрической высоты
,зависящих от числа Маха и массы ЛА; фильтрации сигналов угловой скорости ,передаваемых в БРАС для формирования информации предупреждения о выходе на опасные углы атаки и перегрузки. После чего сигналы подаются в СОИ для индикации включения тревожной сигнализации. Система СКЗП выполнена с возможностью на основе измерения параметров сигналов бортовых датчиков отклонения в пространстве траектории ЛА, выдаваемых приёмником курсоглиссадных радиомаяков, бортовой спутниковой навигационной системы (СНС), датчиком радиовысотомера ,датчиком барометрической высоты  , датчиком воздушной скорости,положения шасси и закрылков в БРАС формировать сигналы принятия решений об условиях выхода за пределы допустимых отклонений, передаваемых в СОИ для индикации включения тревожной сигнализации, в директорные приборы и блок включения систем автоматического управления (САУ). Система СППСВ выполнена с возможностью на основе измерения параметров бортовых датчиков приборной скорости и её производной, вертикальной скорости , приращения угла атаки , определять превышения измеренных и заданных значений при попадании ЛА в условия сдвига ветра; формировать в БРАС сигнал принятия решения о критичности условий попадания в сдвиг ветра, передавая их в СОИ для индикации включения тревожной сигнализации. Входы перечисленных систем вместе с первым входом БРАС соединены с выходами ССБИ. Выходы указанных систем соединены со вторыми входами БРАС, а выход его подключён к СОИ, установленной перед лётчиком экипажа, взаимодействующего с СШУ. Дополнительно введена система выбора режима торможения ЛА, вход которой соединён с выходом ССБИ, а выход соединён со вторыми входами БРАС. Система выбора режима торможения ЛА для каждого момента времени
, датчиком воздушной скорости,положения шасси и закрылков в БРАС формировать сигналы принятия решений об условиях выхода за пределы допустимых отклонений, передаваемых в СОИ для индикации включения тревожной сигнализации, в директорные приборы и блок включения систем автоматического управления (САУ). Система СППСВ выполнена с возможностью на основе измерения параметров бортовых датчиков приборной скорости и её производной, вертикальной скорости , приращения угла атаки , определять превышения измеренных и заданных значений при попадании ЛА в условия сдвига ветра; формировать в БРАС сигнал принятия решения о критичности условий попадания в сдвиг ветра, передавая их в СОИ для индикации включения тревожной сигнализации. Входы перечисленных систем вместе с первым входом БРАС соединены с выходами ССБИ. Выходы указанных систем соединены со вторыми входами БРАС, а выход его подключён к СОИ, установленной перед лётчиком экипажа, взаимодействующего с СШУ. Дополнительно введена система выбора режима торможения ЛА, вход которой соединён с выходом ССБИ, а выход соединён со вторыми входами БРАС. Система выбора режима торможения ЛА для каждого момента времени  оценивает оставшийся тормозной путь
оценивает оставшийся тормозной путь и оставшееся время движения
и оставшееся время движения  в соответствии с выражениями:
в соответствии с выражениями:
 ,
,  ,
,
где:  ,
,  – значения линейной скорости ЛА в последовательные моменты времени,
– значения линейной скорости ЛА в последовательные моменты времени,  при его торможении,
при его торможении,  – время между измерениями скорости. Система осуществляет сравнение прогнозируемого тормозного пути с длиной взлётно-посадочной полосы (ВПП) путём расчёта разности:
– время между измерениями скорости. Система осуществляет сравнение прогнозируемого тормозного пути с длиной взлётно-посадочной полосы (ВПП) путём расчёта разности:
 ,
,
где:  – оставшаяся длина ВПП,
– оставшаяся длина ВПП,  – разница между оставшейся длиной ВПП и оставшимся тормозным путём на момент времени . Если величина приняла отрицательный знак, выдаётся команда экстренного торможения ЛА. Структура БРАС построена в виде двухуровневой системы, в которой на первом уровне распознавания реализуют контроль состояния ЛА и режимов работы его подсистем, а на втором уровне распознавания проводят контроль отказов, контроль за выполнением режимов полёта, контроль критических значений параметров полёта, контроль тормозной системы.
– разница между оставшейся длиной ВПП и оставшимся тормозным путём на момент времени . Если величина приняла отрицательный знак, выдаётся команда экстренного торможения ЛА. Структура БРАС построена в виде двухуровневой системы, в которой на первом уровне распознавания реализуют контроль состояния ЛА и режимов работы его подсистем, а на втором уровне распознавания проводят контроль отказов, контроль за выполнением режимов полёта, контроль критических значений параметров полёта, контроль тормозной системы.
Недостатком данной системы является недостаточная безопасность ЛА при взлёте, посадке и движении ЛА по аэродрому. Это выражается в невозможности препятствования боковому выкатыванию ЛА за пределы ВПП при взлёте и посадке, недостаточно точной оценке возможности продольного выкатывания ЛА, а также недостаточно оперативном информировании экипажа ЛА о необходимости совершения действий, предотвращающих возникновению лётных происшествий, аварий и катастроф при взлете и посадке. Кроме того, система не обеспечивает безопасное движение ЛА по аэродрому.
Задачей, на решение которой направлено заявленное изобретение, является создание интеллектуальной системы поддержки экипажа, реализующей точную оценку возможности препятствования продольного и бокового выкатывания ЛА за пределы ВПП при взлёте и посадке, тем самым обеспечивая повышение безопасности движения ЛА.
Техническим результатом заявляемого изобретения является повышение безопасности движения ЛА при взлёте, посадке и движении ЛА по аэродрому путем препятствования продольному и боковому выкатыванию ЛА за пределы ВПП при взлёте и посадке.
Это достигается за счет реализации интеллектуальной системы поддержки экипажа, включающей в своем составе датчики состояния двигателей, топливной системы, гидросистемы, системы электроснабжения, системы выпуска шасси и торможения, противообледенительной системы, противопожарной системы, системы воздушных сигналов, спутниковую навигационную систему, инерциальную навигационную систему, радиовысотомер, приборную систему посадки, систему штурвального управления, систему сбора бортовой информации (ССБИ), систему отображения информации (СОИ), блок распознавания аварийных ситуаций (БРАС), систему предупреждения об опасной близости земли (СПОБЗ), систему предупреждения о выходе на опасные значения угла атаки и перегрузки (СПВОЗ), систему контроля захода на посадку и посадки (СКЗП), систему предупреждения о попадании в сдвиг ветра (СППСВ), при этом система СПОБЗ выполнена с возможностью определения на основе измерения параметров сигналов бортовых датчиков минимальное значение допустимой высоты над землёй в экстремальных условиях атмосферы для передачи в БРАС с целью формирования информации принятия решения об условиях близости поверхности земли; система СПВОЗ выполнена с возможностью измерения параметров бортовых датчиков угла атаки, угла крена, нормальной перегрузки, угловой скорости тангажа, определения предельно допустимых разностей между опасными и пороговыми значениями по параметрам сигналов угла атаки и его производной, сигналов вертикальной перегрузки и её производной и допустимых значений сигналов угла атаки, сигналов допустимых значений продольной перегрузки, зависящих от числа Маха и веса летательного аппарата (ЛА), а также с возможностью фильтрации сигналов угловой скорости, передаваемых в БРАС для формирования информации предупреждения о выходе на опасные углы атаки и перегрузки; система СКЗП выполнена с возможностью формирования сигналов принятия решений об условиях выхода за пределы допустимых отклонений на основе измерений параметров сигналов бортовых датчиков отклонения в пространстве траектории ЛА; система СППСВ выполнена с возможностью определения превышения измеренных и заданных значений при попадании ЛА в условия сдвига ветра и формирования в БРАС сигнал принятия решения о критичности условий попадания в сдвиг ветра; входы систем ССБИ, СПОБЗ, СКЗП, СППСВ вместе с первым входом БРАС соединены с системой ССБИ, выходы указанных систем соединены с вторым входом БРАС, выход которого подключён к СОИ, установленной перед лётчиком экипажа, взаимодействующего с системой штурвального управления, отличающаяся тем, что дополнительно введена система безопасного движения по аэродрому, состоящая из блока безопасного взлёта и безопасной посадки ЛА, определяющего безразмерные интегральные показатели динамического состояния ЛА, а именно, относительный линейный инвариант тензора отклонений масс и относительный линейный инвариант тензора отклонений моментов инерции, а также из блока безопасного движения по аэродрому, при этом выход ССБИ соединен с первым входом блока безопасного взлета и безопасной посадки и входом блока безопасного движения по аэродрому, выход блока безопасного движения по аэродрому соединён с вторым входом блока безопасного взлёта и безопасной посадки, выход которого соединён с входом блока безопасного движения по аэродрому, выходы блока безопасного движения по аэродрому и блока безопасного взлёта и безопасной посадки объединены и являются выходом системы безопасного движения по аэродрому, который соединён со вторым входом БРАС.
В предпочтительном варианте исполнения интеллектуальной системы поддержки экипажа, блок безопасного взлёта и безопасной посадки содержит блок данных бортовых измерительных систем, блок данных бортовых информационных систем, задатчик постоянных величин, бортовой вычислитель оценки возможности выкатывания ЛА за пределы ВПП, при этом выход блока данных бортовых измерительных систем соединён с первым входом бортового вычислителя оценки возможности выкатывания ЛА за пределы взлетно-посадочной полосы (ВПП), выход блока данных бортовых информационных систем соединён с вторым входом бортового вычислителя оценки возможности выкатывания ЛА за пределы ВПП, выход задатчика постоянных величин соединён с третьим входом бортового вычислителя оценки возможности выкатывания ЛА за пределы ВПП, выход бортового вычислителя оценки возможности выкатывания ЛА за пределы ВПП является выходом блока безопасного взлёта и безопасной посадки.
В другом предпочтительном варианте исполнения интеллектуальной системы поддержки экипажа, блок безопасного движения по аэродрому содержит блок бортовых радиолокационных датчиков, блок бортовых оптико-электронных датчиков, задатчик постоянных величин, блок комплексирования информации, бортовой вычислитель оценки возможности столкновения с препятствием, при этом выход блока бортовых радиолокационных датчиков соединён с первым входом блока комплексирования информации, выход блока бортовых оптико-электронных датчиков соединён с вторым входом блока комплексирования информации, выход задатчика постоянных величин соединён с третьим входом блока комплексирования информации, выход блока комплексирования информации соединён с входом бортового вычислителя оценки возможности столкновения с препятствием, выход бортового вычислителя оценки возможности столкновения с препятствием является выходом блока безопасного движения по аэродрому.
Далее заявленное изобретение будет описано по ссылкам на чертежи:
На фиг. 1 представлена структурная схема интеллектуальной системы поддержки экипажа летательного аппарата, где 1 - датчики состояния двигателей, 2 - датчики состояния топливной системы, 3 - датчики состояния гидросистемы, 4 - датчики состояния системы электроснабжения, 5 - датчики состояния системы выпуска шасси и торможения, 6 - датчики состояния противообледенительной системы, 7 - датчики состояния противопожарной системы, 8 - система воздушных сигналов (СВС), 9 - спутниковая навигационная система (СНС), 10 - инерциальная навигационная система (ИНС), 11 - радиовысотомер, 12 - приборная система посадки (ПСП), 13 - система штурвального управления (СШУ), 14 - система сбора бортовой информации (ССБИ), 15 - система предупреждения об опасной близости земли (СПОБЗ), 16 - система предупреждения о выходе на опасные значения угла атаки и перегрузки (СПВОЗ), 17 - система контроля захода на посадку и посадки (СКЗП), 18 - система предупреждения о попадании в сдвиг ветра (СППСВ), 19 - система безопасного движения по аэродрому, 20 - блок распознавания аварийных ситуаций (БРАС), 21 - система отображения информации (СОИ), 22 - летчик.
На фиг. 2 представлена структурная схема системы обеспечения безопасного движения по аэродрому, где 23 - блок безопасного взлета и безопасной посадки, 24 - блок безопасного движения по аэродрому.
На фиг.3 представлена схема блока безопасного взлета и безопасной посадки, где 25 - блок данных бортовых измерительных систем, 26 - блок данных бортовых информационных систем, 27 - задатчик постоянных величин блока безопасного взлета и безопасной посадки, 28 - бортовой вычислитель оценки возможности выкатывания ВС за пределы ВПП.
На фиг.4 представлена схема блока безопасного движения по аэродрому, где 29 - блок бортовых радиолокационных датчиков, 30 - блок бортовых оптико-электронных датчиков, 31 - задатчик постоянных величин блока безопасного движения по аэродрому, 32 - блок комплексирования информации, 33 - бортовой вычислитель оценки возможности столкновения с препятствием.
Предлагаемая интеллектуальная система поддержки экипажа (фиг. 1-фиг. 4) включает датчики состояния систем двигателей 1, топливной системы 2, гидросистемы 3, системы электроснабжения 4, системы выпуска шасси и торможения 5, противообледенительной системы 6, противопожарной системы 7, системы воздушных сигналов (СВС) 8, спутниковой навигационной системы (СНС) 9, инерциальной навигационной системы (ИНС) 10, радиовысотомера (РВ) 11, приборной системы посадки (ПСП) 12, системы штурвального управления (СШУ) 13, соединённые с входами системы сбора бортовой информации (ССБИ) 14, блок распознавания аварийных ситуаций (БРАС) 20, систему отображения информации (СОИ) 21, систему предупреждения об опасной близости земли (СПОБЗ) 15, систему предупреждения о выходе на опасные значения угла атаки и перегрузки (СПВОЗ) 16, систему контроля захода на посадку и посадки (СКЗП) 17, систему предупреждения о попадании в сдвиг ветра (СППСВ) 18, систему безопасного движения по аэродрому 19, выходы которых соединены со вторыми входами БРАС 20. Первый вход БРАС 20 соединён с выходом ССБИ 14, а выход БРАС 20 соединён с входом СОИ 21, установленной перед лётчиком 22 экипажа, взаимодействующего с СШУ 13. Система безопасного движения по аэродрому 19 содержит блок безопасного взлёта и безопасной посадки 23 и блок безопасного движения по аэродрому 24. Первый выход блока безопасного движения по аэродрому 24 соединён с входом блока безопасного взлёта и безопасной посадки 23. Первый выход блока безопасного взлёта и безопасной посадки 23 соединён с входом блока безопасного движения по аэродрому 24. Выходы блока безопасного взлёта и безопасной посадки 23 и блока безопасного движения по аэродрому 24 объединены и являются выходом системы безопасного движения по аэродрому 19. Блок безопасного взлёта и безопасной посадки 23 содержит блок данных бортовых измерительных систем 25, блок данных бортовых информационных систем 26, задатчик постоянных величин 27 и бортовой вычислитель оценки возможности выкатывания ЛА за пределы ВПП 28. Выход блока данных бортовых измерительных систем 25 соединён с первым входом бортового вычислителя оценки возможности выкатывания ЛА за пределы ВПП 28. Выход блока данных бортовых информационных систем 26 соединён со вторым входом бортового вычислителя оценки возможности выкатывания ЛА за пределы ВПП 28. Выход задатчика постоянных величин 27 соединён с третьим входом бортового вычислителя оценки возможности выкатывания ЛА за пределы ВПП 28. Блок безопасного движения по аэродрому 24 содержит блок бортовых радиолокационных датчиков 29, блок бортовых оптико-электронных датчиков 30, задатчик постоянных величин 31, блок комплексирования информации 32, бортовой вычислитель оценки возможности столкновения с препятствием 33. Выход блока бортовых радиолокационных датчиков 29 соединён с первым входом блока комплексирования информации 32. Выход блока бортовых оптико-электронных датчиков 30 соединён со вторым входом блока комплексирования информации 32. Выход задатчика постоянных величин 31 соединён с третьим входом блока комплексирования информации 32. Выход блока комплексирования информации 32 соединён с входом бортового вычислителя оценки возможности столкновения с препятствием 33.
Интеллектуальная система поддержки экипажа (ИСПЭ) функционирует следующим образом.
ИСПЭ строится на знаниях, объединяющих теоретическое понимание проблемы и набор видов особых ситуаций, распознание которых доказано практикой предметной области в процессе расследования авиационных происшествий, аварий и катастроф, использования результатов автоматизированного экспресс-анализа полётной информации для контроля действий экипажа и работоспособности систем ЛА. ИСПЭ создаётся путём получения знаний от экспертов и кодирования их в форме, допускающей использование в современных вычислителях, а также информации, получаемой от бортовых систем ЛА.
Применение знаний экспертов для формирования стратегии решения задачи является главной чертой интеллектуальных систем. Задача сводится к выработке подходов идентификации особых ситуаций, которые могут возникнуть в полёте и своевременной подсказки экипажу о необходимых действиях по их локализации. Каждое решение принимается на основе исходных данных, представляющих собой полётную информацию, как правило, индицируемую на приборных досках экипажа. Самым важным элементом решения является оценка сложившейся особой ситуации и формирование для экипажа подсказки, однозначно позволяющей парировать эту ситуацию благодаря реализации полученных экипажем рекомендаций.
Применительно к ИСПЭ это означает решение следующих задач:
– выявление и анализ отклонений в работе подсистемы «ЛА-экипаж», влияющих на безопасность полётов;
– разработка автоматизированных методов идентификации особых ситуаций на стадии их начального развития, вмешательство в парирование которых может предотвратить авиационное происшествие, аварию или катастрофу;
– выработка подсказки экипажу ЛА для предотвращения неблагоприятного развития особой ситуации, которая может закончиться авиационным происшествием, аварией или катастрофой.
Анализ статистики лётных происшествий в авиации показывает, что значительное число происшествий обусловлено ошибками лётного состава, диспетчеров и обслуживающего персонала при практически исправной авиационной технике. Это требует установки на борт ЛА систем 15,16,17,18,19, обеспечивающих экипаж сигналами о приближении к предельно допустимым значениям полёта. Сформированные в системе ИСПЭ предельно допустимые значения параметров сопоставляются с текущими их значениями и в зависимости от величины разности между ними и скорости её изменения вырабатываются предупреждающие сигналы, являющиеся для экипажа командой для выполнения корректирующих действий по предотвращению выхода на критический режим полёта. В процессе принятия решения и выполнения корректирующих действий экипаж имеет информацию о текущих и предельно допустимых значениях параметров полёта.
На борт ЛА устанавливаются (фиг.1) система сигнализации опасной близости земли (15), система предупреждения о выходе на опасные углы атаки и перегрузки (16), система захода на посадку и посадки (17), система предупреждения о попадании в сдвиг ветра (18).
Данные системы аналогичны системам, применяемым в выбранном прототипе.
Несмотря на отдельные особенности вышеуказанных систем, в каждой из них тот или иной параметр сравнивается с соответствующим пороговым значением, и в случае его превышения выдаётся предупреждающий сигнал, то есть они представляют собой системы контроля. Оценками эффективности систем предупреждения критических режимов являются критерии вероятности пропуска опасной ситуации и ложного срабатывания системы. Критическим значением параметра является превышение некоторого значения с вероятностью, близкой к единице, которое приведёт к аварийной ситуации. Опасное значение – требующее предельных, чрезвычайных мер для предотвращения выхода за критическое значение параметра. Пороговое значение – такое, при котором система сигнализации допуска должна срабатывать по своему назначению. ИСПЭ в нормальных условиях полёта остаётся пассивной и наблюдает за состоянием ЛА, за режимом работы двигателей, работы оборудования и экипажа. Если все системы и агрегаты ЛА работают нормально и пилотирование осуществляется таким образом, что не прогнозируется выход параметров движения ЛА за критические значения, ИСПЭ определяет нормальное выполнение режима.
При возникновении аварийной ситуации (АС) ИСПЭ оценивает информацию о внешней и внутренней среде. Когда прогноз показывает, что ЛА выходит за пределы эксплуатационных ограничений, ИСПЭ формирует решения и выдаёт рекомендации по минимизации неблагоприятных последствий (блок 20). В ИСПЭ моделируется поведение системы «ЛА – бортовое оборудование (БО)» и выдаётся прогноз развития событий в полёте на блоке СОИ 21 отображения информации о состоянии БО, работе двигателей и параметров, характеризующих поведение ЛА. Если экипаж предпринимает правильные действия или действия в направлении развития указанной ситуации, то ИСПЭ не вмешивается в управление ЛА, а выдаёт рекомендации и подсказки экипажу по пилотированию ЛА. В случае отсутствия реакции ИСПЭ в исключительных случаях формирует необходимые корректирующие и управляющие сигналы в систему по парированию опасной ситуации и стабилизации полёта ЛА.
В алгоритмах ИСПЭ последовательно анализируются признаки возникновения АС. Каждый из признаков с определённой достоверностью  определяет наличие такой ситуации. Если суммарная достоверность достигает заданной пороговой величины
определяет наличие такой ситуации. Если суммарная достоверность достигает заданной пороговой величины  , то констатируется наличие данной ситуации. После этого анализируются условия полёта (параметры движения: высота, скорость, угловое положение и др., остаток топлива, метеоусловия, наличие препятствий на ВПП, положение рулей, шасси и других агрегатов ЛА и т.д.) и формируется рекомендация экипажу – подсказки более высокого уровня. Система сбора бортовой информации (ССБИ) 14 – мультиплексный канал связи – система, в которой распространяются сигналы от передатчика (блоки 1-13) к приёмнику. В ней организуется одновременная передача нескольких независимых сообщений, каждое из которых следует по своему каналу. На одной линии канала может быть очень много сообщений. Это дуплексные каналы с одновременной связью в прямом и обратном направлении. Каналы связи с отправлением и получением информации образуют систему ССБИ 14. Независимые сообщения
, то констатируется наличие данной ситуации. После этого анализируются условия полёта (параметры движения: высота, скорость, угловое положение и др., остаток топлива, метеоусловия, наличие препятствий на ВПП, положение рулей, шасси и других агрегатов ЛА и т.д.) и формируется рекомендация экипажу – подсказки более высокого уровня. Система сбора бортовой информации (ССБИ) 14 – мультиплексный канал связи – система, в которой распространяются сигналы от передатчика (блоки 1-13) к приёмнику. В ней организуется одновременная передача нескольких независимых сообщений, каждое из которых следует по своему каналу. На одной линии канала может быть очень много сообщений. Это дуплексные каналы с одновременной связью в прямом и обратном направлении. Каналы связи с отправлением и получением информации образуют систему ССБИ 14. Независимые сообщения  многоканальной системы связи от (частотное уплотнение)
многоканальной системы связи от (частотное уплотнение)  источников (отправителей) подаются на входы передатчиков и там преобразуются (модуляция) в соответствующие этим сообщениям сигналы
источников (отправителей) подаются на входы передатчиков и там преобразуются (модуляция) в соответствующие этим сообщениям сигналы  . Сигналы всех передатчиков поступают в линии связи.
. Сигналы всех передатчиков поступают в линии связи.
С линий связи смесь всех  каналов поступают на входы приёмников, там сигналы разделяются селекторами, преобразуются (демодуляция) и информация выдаётся получателям. Приёмники воспроизводят переданные сообщения.
каналов поступают на входы приёмников, там сигналы разделяются селекторами, преобразуются (демодуляция) и информация выдаётся получателям. Приёмники воспроизводят переданные сообщения.
Система предупреждения об опасной близости земли (СПОБЗ) 15 является средством повышения безопасности полётов, обеспечивая с помощью звуковых и визуальных сигналов предупреждения членов экипажа о возникновении таких условий полёта, развитие которых может привести к столкновению с земной или водной поверхностью.
Опасность определяется тем, позволяют ли характеристики ЛА при данных расстояниях от препятствия и скорости сближения предотвратить непреднамеренное столкновение с ним. Для подавляющего числа случаев опасного сближения с землёй задача решается на основе информации радиовысотомера (11), измерителя вертикальной скорости ЛА и приёмника сигналов отклонения от радиотехнической глиссады посадки (12).
СПОБЗ 15 использует входные сигналы от самолётных систем, определяющих географическое местоположение, пространственную ориентацию, высоту, воздушную скорость и глиссаду. Эти данные используются совместно с внутренними базами данных о местности, препятствиях и аэропортах для предупреждения потенциального пересечения траектории полёта ЛА с местностью или препятствием. Определив такую возможность, система СПОБЗ 15 выдаёт визуальный и звуковой предупреждающий или аварийный тревожный сигнал.
Система выдаёт тревожные сигналы при преднамеренных отклонениях от глиссады ниже высоты полёта с закрылками или шасси, находящимися вне посадочной конфигурации, выдаёт подсказки об угле крена и высоте.
В системе обеспечивается определение минимально допустимой высоты пролёта над местностью. Это дополнительный элемент защиты, предупреждающий лётчика о возможности преждевременного снижения, предназначен для неточных заходов на посадку и базируется на текущем местоположении самолёта относительно ближайшей ВПП.
Геометрическая высота, определяемая СНС 9, представляет собой вычисленную псевдобарометрическую высоту, предназначенную для устранения ошибок измерения высоты, вызываемых экстремальными значениями температуры, нестандартными условиями давления и не правильной выставкой высотомера. Эти свойства обеспечивают оптимальную выдачу тревожных сигналов и индикацию.
Как минимум система выполняет основные функции тревожной сигнализации:
– функцию переднего обзора местности для предотвращения столкновения, которая охватывает недостаточный запас высоты при пролёте местности, угрозу столкновения с местностью;
– функцию тревожной сигнализации о преждевременном снижении;
– чрезмерную вертикальную скорость снижения ;
– чрезвычайную скорость сближения с местностью;
– отрицательную скорость набора высоты или потерю высоты после взлёта;
– сближение с местностью при полёте вне посадочной конфигурации;
– чрезмерное отклонение вниз от глиссады системы посадки;
– снижение самолёта до высоты, относительно возвышения местности или ближайшей ВПП (речевая подсказка).
Режим работы СПОБЗ 15:
1 – чрезмерная скорость снижения;
2 – чрезмерная скорость сближения с землёй;
3 – полёт на высоте менее 200 м при заходе на посадку с убранными шасси или закрылками;
4 – отрицательная вертикальная скорость при потере высоты на взлёте до высоты менее 200м;
5 – чрезмерное отклонение вниз от радиотехнической глиссады посадки.
Срабатывание сигнализации происходит при условии:
– в режиме 1:  ,
,
– в режиме 2:  ,
,
– в режиме 3:  ,
,
где: – угловое отклонение от глиссады;
– угловое отклонение от глиссады; ,
, ,
, – зависимости опасной высоты
– зависимости опасной высоты  от вертикальной скорости , от скорости
от вертикальной скорости , от скорости  сближения с землёй, от отклонения от глиссады.
сближения с землёй, от отклонения от глиссады.
Для компенсации запаздывания в сигналах производной барометрической высоты и подавления помех, обусловленных искажениями давления при его измерении ПВД, вертикальная скорость формируется комплексированием барометрической и инерциальной информации:
 ,
,
где  – производная сигнала барометрической высоты;
– производная сигнала барометрической высоты;  – вертикальное ускорение в земных осях;
– вертикальное ускорение в земных осях;  ,
,  – параметры фильтра, выбираемые из условия минимума средней квадратической погрешности в сигнале ;
– параметры фильтра, выбираемые из условия минимума средней квадратической погрешности в сигнале ;  – оператор дифференцирования.
– оператор дифференцирования.
Сигнал скорости сближения с землёй формируется путём комплексирования производной сигнала радиовысотомера и сигнала вертикальной скорости. Это необходимо для фильтрации флуктуационной составляющей в производной сигнала радиовысотомера, обеспечивая при этом практически полное отсутствие запаздывания в сигнале  при собственном движении ЛА:
при собственном движении ЛА:
 ,
,
где  – сигнал радиовысотомера (11),
– сигнал радиовысотомера (11),  – параметр фильтра, зависящий от режима полёта; – оператор дифференцирования.
– параметр фильтра, зависящий от режима полёта; – оператор дифференцирования.
Каждый из режимов работы системы оценивается отдельно, так как предельно допустимое значение высоты является функцией различных параметров, а следовательно, разными будут и законы распределения погрешностей срабатывания системы.
К критическим режимам полёта, определяемым в СПВОЗ 16, относятся:
– полёт на больших углах атаки с возможным попаданием самолёта в сваливание;
– выполнение энергичных маневров крена с выходом на большие угловые скоростии заметным проявлением взаимодействия продольного и бокового движения.
При этом, сваливание - это самопроизвольное развитие процессов по тангажу, рысканию и крену. Рассматривая физическую природу явления сваливания при выходе самолёта на закритические углы атаки, можно выделить несколько видов:
– сваливание, обусловленное потерей несущих свойств крыла;
– сваливание типа авторотации из-за потери демпфирования движения крена;
– сваливание из-за потери боковой колебательной устойчивости;
– сваливание из-за поперечной управляемости;
– сваливание из-за потери путевой устойчивости.
Фактором, приводящим к преждевременному сваливанию, может быть подхват по тангажу из-за нелинейности моментной характеристики ЛА по углу атаки. Поведение ЛА на больших углах атаки зачастую определяется совокупностью нескольких видов событий.
При превышении допустимых углов атаки ( меньше  ) обеспечивается эффективная сигнализация о приближении к предельным режимам полёта. Когда используется сигнал угла атаки, необходимо введение опережения, поскольку важны не столько текущий угол атаки, сколько своевременный прогноз его изменения. Для этой цели используется сигнал датчика угловой скорости , пропускаемой через фильтр. С допустимым значением сравнивается текущее значение упреждённого угла атаки:
) обеспечивается эффективная сигнализация о приближении к предельным режимам полёта. Когда используется сигнал угла атаки, необходимо введение опережения, поскольку важны не столько текущий угол атаки, сколько своевременный прогноз его изменения. Для этой цели используется сигнал датчика угловой скорости , пропускаемой через фильтр. С допустимым значением сравнивается текущее значение упреждённого угла атаки:
 ,
,  .
.
Системой предупреждения о выходе на опасные значения угла атаки и нормальной перегрузки (блок 16) реализуются следующие законы срабатывания сигнализации:
 ,
,
 ,
,
где: ,  – предельно допустимые значения угла атаки и нормальной перегрузки;
– предельно допустимые значения угла атаки и нормальной перегрузки;  ,
,  – текущие значения угла атаки и нормальной перегрузки, при которых должна срабатывать сигнализация;
– текущие значения угла атаки и нормальной перегрузки, при которых должна срабатывать сигнализация;  ,
,  – статический запас на срабатывание сигнализации;
– статический запас на срабатывание сигнализации; ,
,  ,
,  ,
,  – коэффициенты усиления и передаточные функции фильтров сигналов упреждения (
– коэффициенты усиления и передаточные функции фильтров сигналов упреждения ( и
и  ).
).
Необходимо отметить, что суммы  и
и  представляют собой разности между опасным и пороговым значениями параметров, которые учитывают суммарные погрешности формирования , и динамики их изменения. На указатель угла атаки и перегрузки выводятся текущие ( и ) и предельно допустимые ( и ) значения угла атаки и нормальной перегрузки. Передаточные функции и выбираются и оцениваются из двух противоречивых требований – подавления помех в сигналах , и пропускания полезных составляющих. Поскольку предельно допустимые значения угла атаки, как правило, зависят от числа Маха
представляют собой разности между опасным и пороговым значениями параметров, которые учитывают суммарные погрешности формирования , и динамики их изменения. На указатель угла атаки и перегрузки выводятся текущие ( и ) и предельно допустимые ( и ) значения угла атаки и нормальной перегрузки. Передаточные функции и выбираются и оцениваются из двух противоречивых требований – подавления помех в сигналах , и пропускания полезных составляющих. Поскольку предельно допустимые значения угла атаки, как правило, зависят от числа Маха  , а является функцией массы самолёта, погрешность срабатывания сигнализаторов зависит от погрешностей вычисления аргументов этих функций. Поэтому точность формирования этих параметров определяется в процессе испытаний.
, а является функцией массы самолёта, погрешность срабатывания сигнализаторов зависит от погрешностей вычисления аргументов этих функций. Поэтому точность формирования этих параметров определяется в процессе испытаний.
Система контроля захода на посадку и посадки (17) получает информацию при заходе на посадку в условиях ограниченной видимости с помощью наземных курсоглиссадных радиомаяков, когда создаются электромагнитные поля, формирующие заданную траекторию полёта в пространстве. Измерение отклонений самолёта от заданной траектории захода на посадку с помощью радиотехнических средств производится в угломерной системе координат, где  и
и  обозначены проекции вектора скорости ЛА, нормальные их линиям, соединяющим ЛА с курсовым маяком (КРМ) и глиссадным маяком (ГРМ) соответственно:
обозначены проекции вектора скорости ЛА, нормальные их линиям, соединяющим ЛА с курсовым маяком (КРМ) и глиссадным маяком (ГРМ) соответственно:
 ,
,
 .
.
Учитывая малость углов  и
и  , после преобразований получаем систему уравнений:
, после преобразований получаем систему уравнений:
 ,
,
 .
.
Величина  есть оставшееся время полёта до соответствующего радиомаяка при условии движения ЛА с постоянной скоростью, равной скорости в рассматриваемый момент времени. Уравнения являются уравнениями кинематики захода на посадку по курсоглиссадным радиомаякам. Переменные по времени коэффициенты
есть оставшееся время полёта до соответствующего радиомаяка при условии движения ЛА с постоянной скоростью, равной скорости в рассматриваемый момент времени. Уравнения являются уравнениями кинематики захода на посадку по курсоглиссадным радиомаякам. Переменные по времени коэффициенты  ,
,  характеризуют контур управления наведения ЛА на ВПП, являющийся нестационарной динамической системой. Управление траекторией полёта осуществляется либо автоматически с помощью автопилота, либо отрабатывающим команды вычислителем траекторного управления, либо лётчиком, управляющим самолётом по директорному прибору.
характеризуют контур управления наведения ЛА на ВПП, являющийся нестационарной динамической системой. Управление траекторией полёта осуществляется либо автоматически с помощью автопилота, либо отрабатывающим команды вычислителем траекторного управления, либо лётчиком, управляющим самолётом по директорному прибору.
Сигналы предупреждения вырабатываются системой при значениях текущей высоты ниже установленных минимально допустимых значений или при отклонении вниз от равносильной зоны радиотехнической глиссады (РТГ), превышающем установленные максимально допустимые значения. Выдача сигналов предупреждения системой продолжается непрерывно до устранения причины, вызывающей предупреждение.
Минимально допустимые значения высоты полёта и максимально допустимые отклонения вниз от РТГ автоматически вычисляются системой в течение полёта на основе текущих значений сигналов бортового приёмника СНС, радиовысотомера, датчика барометрической высоты, датчика воздушной скорости (или числа  ), бортового посадочного радиоприёмника, а также в зависимости от положения шасси и закрылков ЛА.
), бортового посадочного радиоприёмника, а также в зависимости от положения шасси и закрылков ЛА.
Основными внешними возмущениями, приводящими к рассеиванию траектории полёта, являются ветровые возмущения и искривления полей курсоглиссадных радиомаяков. Интенсивность этих возмущений, оцениваемых величиной средней скорости ветра, а также среднеквадратическими отклонениями величины порывов ветра и искривлениями полей радиомаяков, является случайным фактором.
Успешность захода ЛА на посадку определяется выполнением следующих требований:
– отклонения от заданной траектории захода на посадку таковы, что не происходит срабатывание сигнализации о достижении предельных отклонений;
– устройства контроля исправности аппаратуры системы захода на посадку не отключают аппаратуру, необходимую для выполнения безопасного захода на посадку;
– скорость полёта при заходе на посадку не выходит за пределы собственных ограничений.
Система предупреждения экипажа о попадании в сдвиг ветра 18 при пилотировании определяет изменение во времени направления и скорости ветра в области воздушного пространства, где находится ЛА. В метеорологическом аспекте «сдвиг» ветра представляет собой изменение скорости и (или) направления ветра в функции высоты или расстояния.
Поскольку с темпом изменения скорости и направления ветра изменяются воздушная скорость и угол атаки самолёта, а следовательно, подъёмная сила и лобовое сопротивление, то в том же темпе происходит нарушение баланса сил, действующих на самолёт. На этапах взлёта и посадки при ограниченном запасе высоты неожиданное для экипажа попадание в сдвиг ветра и отсутствие на приборной доске явных признаков для его обнаружения приводят к лётным происшествиям.
Наиболее опасными считаются изменения продольной и вертикальной составляющих ветра. Изменение боковой составляющей ветра менее опасно. Для ЛА, летящего с постоянной воздушной скоростью в продольной плоскости и попадающего в сдвиг ветра, относительное изменение баланса сил вдоль вектора путевой скорости определяется соотношением:
 ,
,
где  – тяга силовой установки ЛА;
– тяга силовой установки ЛА;  – лобовое сопротивление;
– лобовое сопротивление;  – вес ЛА;
– вес ЛА; ,
,  – проекции скорости ветра на оси скоростной системы координат.
– проекции скорости ветра на оси скоростной системы координат.
Следовательно, в качестве параметра, характеризующего суммарное воздействие сдвига ветра на ЛА, можно принять величину:
 ,
,
где:  – приращение угла атаки за счёт составляющей скорости ветра
– приращение угла атаки за счёт составляющей скорости ветра  .
.
Обнаружение сдвига ветра на борту ЛА в процессе полёта сводится к косвенным измерениям отдельных составляющих указанной суммы, характеризующих сдвиг ветра.
Продольная составляющая скорости ветра может быть определена:
 ,
,
где  и
и  – соответственно модули путевой и воздушной скоростей.
– соответственно модули путевой и воздушной скоростей.
Производная скорости ветра определяется без изменения путевой скорости:
 ,
,
где: – продольная перегрузка в связанных осях;
– продольная перегрузка в связанных осях;  – приближенное выражение производной путевой скорости полёта ЛА (угол в радианах),
– приближенное выражение производной путевой скорости полёта ЛА (угол в радианах),  – угол тангажа.
– угол тангажа.
Приращение угла атаки за счёт вертикальной составляющей скорости ветра определяется:
 ,
,
где  ,
,  – вертикальная составляющая воздушной скорости.
– вертикальная составляющая воздушной скорости.
Таким образом, суммарная характеристика сдвига ветра определяется на основе бортовых измерений:
 .
.
Система предупреждения экипажа о попадании в сдвиг ветра производит сравнение измеренного и вычисленного сигналов о сдвиге ветра с предельно допустимым его значением.
Допустимое значение сдвига ветра зависит от энергетических возможностей самолёта и его силовой установки. То есть может ли в данных условиях быть создан избыток тяги, достаточный для парирования сдвига ветра:
 .
.
Предельно допустимое значение зависит также от параметров полёта. В случае если при заходе на посадку фактическая приборная скорость превышает заданное значение, допускается полёт при большом сдвиге ветра, приводящем к снижению вертикальной скорости. Аналогична зависимость допустимых значений сдвига ветра от отклонений от глиссады посадки, заданной вертикальной скорости. Существенную роль при определении допустимых значений играет и направление (знак) сдвига ветра, т.е. тенденция к увеличению или уменьшению приборной скорости.
Анализ погрешностей измерения параметров ,  ,
,  , показывает, что они, как правило, постоянны в процессах захода на посадку и взлёте. Компенсация этих погрешностей обеспечивается с помощью изодромного звена
, показывает, что они, как правило, постоянны в процессах захода на посадку и взлёте. Компенсация этих погрешностей обеспечивается с помощью изодромного звена , параметр
, параметр  которого зависит от величины сигнала
которого зависит от величины сигнала  на входе системы.
на входе системы.
Введение изодромного звена позволяет исключить из рассмотрения малые значения сдвига ветра или погрешности его измерения.
Команда на сигнализацию, предупреждающую экипаж, поступает при выполнении условия:
 ,
,
где  .
.
Величина  зависит от типа самолёта, величины и знака отклонений от заданных значений приборной и вертикальной скоростей, высоты и режима полёта.
зависит от типа самолёта, величины и знака отклонений от заданных значений приборной и вертикальной скоростей, высоты и режима полёта.
Сигнал на индикатор, обеспечивающий экипажу парирование влияния сдвига ветра, формируется следующим образом:
 ,
,
где  – заданное на данном режиме полёта значение приборной скорости;
– заданное на данном режиме полёта значение приборной скорости;  – измеренная приборная скорость.
– измеренная приборная скорость.
Информационная избыточность навигационных и пилотажных комплексов обеспечивает высокую надёжность измерений параметров движения. Особенно ответственным звеном здесь являются средства индикации пилотажно-навигационной обстановки на приборной доске лётчика (СОИ, блок 21), которые создают лётчику информационную модель полёта, то есть наряду с требованиями надёжности к ним предъявляются требования наглядности, ёмкости и доходчивости воспроизведения лётчику текущей обстановки. От этого зависит эффективность его действий, особенно в критических ситуациях. Повышению информативности и наглядности индикации способствует интегрирование информации на данном режиме полёта.
БРАС (блок 20) управляющая структура на основе базы данных – процедурная программа (ПП), где управление сильно локализовано. Основным средством управления является последовательный порядок выполнения инструкций, таких как: «Если-то-иначе-делать-повторять-пока», которые работают с частью параметров, описывающих данную ситуацию. Ход выполнения инструкции связан с данными, небольшие изменения входных данных мало влияют на выполнение программы. Механизм управления «прозрачен», и информация растворена в самих процедурах и используемых предоставленных данных.
Структура БРАС 20 построена по алгоритмам в виде двухуровневой системы, в которой на первом уровне реализуют контроль состояния ЛА и режимов работы его подсистем, на втором уровне проводят контроль отказов, контроль за выполнением режимов полёта, контроль критических значений параметров полёта, взлета и посадки.
В процессе работы БРАС (блок 20) выполняет контроль состояния ЛА, режимов работы его подсистем силовой установки, функционирования оборудования и параметров полёта, взлета и посадки. При этом анализируются условия полёта по маршруту, взлета, посадки и формируются соответствующие информационные сообщения. Обработка и анализ информации осуществляется с минимальными вычислительными затратами, в реальном времени, чтобы своевременно распознать особую ситуацию и выдать экипажу необходимое сообщение о требуемых действиях по парированию возникшей ситуации.
Алгоритмы БРАС (блок 20) сгруппированы по разделам: контроль отказов, контроль выполнения режимов полёта, критических значений параметров полёта по маршруту, взлета и посадки. Алгоритмы реализованы в виде двухуровневой системы, которая на первом уровне определяет режим полёта (разбег, взлёт, начальный набор высоты и т.д.), а затем на втором уровне, в соответствии с определённым режимом полёта, проверяет наличие особых ситуаций. Далее приведены алгоритмы, включающие в себя те признаки и параметры, значения которых проверяются в данном условии, а также информационное сообщение, выдаваемое на индикацию при выполнении условия. Алгоритм распознавания особой ситуации, связанной с отказом, представляет собой логическое правило проверки соответствующих признаков (возникновение определённой ситуации).
Далее рассмотрим алгоритмы функционирования блока безопасного взлёта и безопасной посадки, входящего в состав системы безопасного движения по аэродрому.
1. Определение эффективных инерционных характеристик ЛА.
Система безопасного движения по аэродрому 19 определяет обобщённые показатели динамического состояния ЛА на этапах взлёта и посадки, а также определяет опасное расстояние по дальности, путевую скорость и скорость сближения ЛА с препятствием при его движении по аэродрому. В качестве обобщённых показателей динамического состояния ЛА на этапах взлёта и посадки используются относительный линейный инвариант  тензора отклонений масс и относительный линейный инвариант
тензора отклонений масс и относительный линейный инвариант  тензора отклонений моментов инерции. Показатели ,определяются через тензор эффективных масс
тензора отклонений моментов инерции. Показатели ,определяются через тензор эффективных масс  и тензор эффективных моментов инерции
и тензор эффективных моментов инерции  соответственно.
соответственно.
Идея использовать эффективную массу  в качестве обобщённого показателя динамического состояния ЛА на этапе взлёта была предложена в 2000-х годах в работах Глубокой М.Г. [4-6]. С физической точки зрения масса является одним из основных параметров, определяющих в первую очередь характер поступательного движения объекта. При этом, под поступательным движением объекта понимается поступательное движение некоторой его точки (как правило, центра масс). Однако воздушные суда не являются материальной точкой, они обладают вполне конкретными ненулевыми размерами. То есть, с точки зрения механики их следует рассматривать как твёрдое тело, которое характеризуется не только поступательным движением какой-либо точки ЛА, но и угловым движением ЛА относительно этой точки. Но эффективная масса может слабо реагировать на изменение углового движения объекта. В результате оценка текущего динамического состояния ЛА по одной эффективной массе в некоторых случаях может приводить к большим ошибкам – суммарная погрешность определения массы магистрального самолёта может составлять до 20 т [4].
в качестве обобщённого показателя динамического состояния ЛА на этапе взлёта была предложена в 2000-х годах в работах Глубокой М.Г. [4-6]. С физической точки зрения масса является одним из основных параметров, определяющих в первую очередь характер поступательного движения объекта. При этом, под поступательным движением объекта понимается поступательное движение некоторой его точки (как правило, центра масс). Однако воздушные суда не являются материальной точкой, они обладают вполне конкретными ненулевыми размерами. То есть, с точки зрения механики их следует рассматривать как твёрдое тело, которое характеризуется не только поступательным движением какой-либо точки ЛА, но и угловым движением ЛА относительно этой точки. Но эффективная масса может слабо реагировать на изменение углового движения объекта. В результате оценка текущего динамического состояния ЛА по одной эффективной массе в некоторых случаях может приводить к большим ошибкам – суммарная погрешность определения массы магистрального самолёта может составлять до 20 т [4].
Для оценки углового движения нужен другой показатель. Из механики известно, что угловое движение твёрдого тела определяется тензором моментов инерции  , компоненты которого в любой декартовой системе координат образуют симметричную матрицу 3х3. Поэтому, развивая идею Глубокой М.Г., в качестве дополнительного показателя динамического состояния ЛА на этапах взлёта и посадки целесообразно использовать «тензор эффективных моментов инерции»
, компоненты которого в любой декартовой системе координат образуют симметричную матрицу 3х3. Поэтому, развивая идею Глубокой М.Г., в качестве дополнительного показателя динамического состояния ЛА на этапах взлёта и посадки целесообразно использовать «тензор эффективных моментов инерции»  [7].
[7].
Рассмотрим, каким образом, в уравнениях движения появляются эффективные инерционные характеристики.
Предположим, что мы имеем модель движения ЛА, которая описывает нормальный (расчётный) режим ускоренного движения конкретного ЛА по конкретной ВПП в конкретных условиях относительно некоторой инерциальной системы отсчёта:
 (1)
(1)
где  ,
,  –масса и тензор моментов инерции ЛА;
–масса и тензор моментов инерции ЛА;  ,
, – векторы поступательной и угловой скоростей ВС;
– векторы поступательной и угловой скоростей ВС;  ,
,  – равнодействующие векторы внешних сил и моментов, действующих на ВС:
– равнодействующие векторы внешних сил и моментов, действующих на ВС:
 ,
,
 .
.
Составляющие векторов и имеют следующий смысл:  – аэродинамическая сила,
– аэродинамическая сила,  – сила тяги двигателей ВС,
– сила тяги двигателей ВС,  – сила трения ВПП,
– сила трения ВПП,  – сила нормальной реакции ВПП,
– сила нормальной реакции ВПП,  – сила тяжести;
– сила тяжести;  ,
,  ,
,  ,
,  ,
,  – моменты перечисленных сил. Все указанные скаляр, тензор и векторы соответствуют нормальному (расчётному) режиму движения ЛА, поэтому имеют нижний индекс «н». В левой части второго соотношения системы (1) рассматривается скалярное произведение тензора на вектор, которое представляет собой внешнее произведение двухвалентного тензора на одновалентный тензор с последующей свёрткой по двум индексам.
– моменты перечисленных сил. Все указанные скаляр, тензор и векторы соответствуют нормальному (расчётному) режиму движения ЛА, поэтому имеют нижний индекс «н». В левой части второго соотношения системы (1) рассматривается скалярное произведение тензора на вектор, которое представляет собой внешнее произведение двухвалентного тензора на одновалентный тензор с последующей свёрткой по двум индексам.
Составляющие векторов  и
и  зависят от многих факторов – текущих скоростей ,
зависят от многих факторов – текущих скоростей ,  , коэффициентов трения колёс шасси ЛА о ВПП, параметров атмосферы и ветра, параметров двигателя, углов атаки и скольжения, углов рысканья, тангажа и крена и т.д. Эти зависимости подробно описаны в работе [8]. С целью сокращения записи в соотношениях (1) указана зависимость
, коэффициентов трения колёс шасси ЛА о ВПП, параметров атмосферы и ветра, параметров двигателя, углов атаки и скольжения, углов рысканья, тангажа и крена и т.д. Эти зависимости подробно описаны в работе [8]. С целью сокращения записи в соотношениях (1) указана зависимость  ,
,  только от ,
только от ,  как главных для нас факторов.
как главных для нас факторов.
Соотношения (1) представляют собой систему дифференциальных уравнений, описывающих движение ЛА по ВПП. Они позволяет рассчитать векторы скорости,  при известных массе
при известных массе  , тензоре моментов инерции
, тензоре моментов инерции  , а также известных функциональных зависимостях вектора силы
, а также известных функциональных зависимостях вектора силы  и вектора момента
и вектора момента от скоростей,
от скоростей,  .
.
Однако соотношения (1) могут быть использованы и в обратном направлении – если мы знаем векторы скоростей,  (допустим, получили их проекции в процессе измерений), а также знаем функциональные зависимости вектора силы
(допустим, получили их проекции в процессе измерений), а также знаем функциональные зависимости вектора силы  и вектора момента
и вектора момента  от скоростей ,
от скоростей ,  , то можем определить массу
, то можем определить массу  и тензор моментов инерции
и тензор моментов инерции  . Точность их определения будет определяться точностью измерений значений скоростей ,
. Точность их определения будет определяться точностью измерений значений скоростей ,  .
.
Теперь предположим, что режим движения ЛА по ВПП, обладающего той же массой и тем же тензором моментов инерции , не соответствует нормальному (расчётному). Это означает, что появились дополнительные (возмущающие) сила  и момент
и момент  , которые изменят поступательную и угловую скорости ЛА – вместо ,
, которые изменят поступательную и угловую скорости ЛА – вместо ,  будем иметь некоторые значения
будем иметь некоторые значения  ,
, . Соответственно изменятся и уравнения движения:
. Соответственно изменятся и уравнения движения:
 где
где  (2)
(2)
Про возмущающие силу и момент  мы ничего не знаем, поэтому определить с помощью модели (2) массу и тензор моментов инерции (как в случае с моделью (1)) мы не можем. Однако мы можем измерить проекции векторов поступательной
мы ничего не знаем, поэтому определить с помощью модели (2) массу и тензор моментов инерции (как в случае с моделью (1)) мы не можем. Однако мы можем измерить проекции векторов поступательной  и угловой
и угловой  скоростей ЛА. Если мы подставим эти значения в соотношения (1), то эти равенства выполняться не будут. Чтобы при использовании скоростей
скоростей ЛА. Если мы подставим эти значения в соотношения (1), то эти равенства выполняться не будут. Чтобы при использовании скоростей  , равенства (1) выполнялись, необходимо либо добавить в них возмущения ,
, равенства (1) выполнялись, необходимо либо добавить в них возмущения ,  (т.е. перейти к модели (2)), либо изменить массу и тензор моментов инерции. Первый вариант нам не подходит, поскольку у нас нет информации о возмущениях ,
(т.е. перейти к модели (2)), либо изменить массу и тензор моментов инерции. Первый вариант нам не подходит, поскольку у нас нет информации о возмущениях ,  . Воспользуемся вторым вариантом – изменим массу и тензор моментов инерции, т.е. запишем соотношения (1) в виде:
. Воспользуемся вторым вариантом – изменим массу и тензор моментов инерции, т.е. запишем соотношения (1) в виде:
 (3)
(3)
Введённые новые величины,представляют собой соответственно «тензор эффективных масс» и «тензор эффективных моментов инерции» ЛА.
Представим эти тензоры в виде:
 ,
,  . (4)
. (4)
Здесь  – единичный тензор. Тогда соотношения (3) можно записать в виде:
– единичный тензор. Тогда соотношения (3) можно записать в виде:
 (5)
(5)
Таким образом, получаем модель (2), в которой:
 ,
,  .
.
Здесь знак « » означает скалярное произведение тензора на вектор, которое представляет собой внешнее произведение двухвалентного тензора на одновалентный тензор с последующей свёрткой по двум индексам.
» означает скалярное произведение тензора на вектор, которое представляет собой внешнее произведение двухвалентного тензора на одновалентный тензор с последующей свёрткой по двум индексам.
Относительно введённых эффективных инерционных характеристик отметим следующие их свойства:
1. При формировании модели (3) мы не можем рассматривать эффективную массу как скаляр . Это было бы возможно в том случае, если вектор  был бы параллелен вектору линейного ускорения
был бы параллелен вектору линейного ускорения  . Но вектор есть произвольное возмущение, он может иметь любое направление. Поэтому в общем случае эффективную массу следует рассматривать как двухвалентный тензор , компоненты которого в любой декартовой системе координат задаются матрицей 3х3.
. Но вектор есть произвольное возмущение, он может иметь любое направление. Поэтому в общем случае эффективную массу следует рассматривать как двухвалентный тензор , компоненты которого в любой декартовой системе координат задаются матрицей 3х3.
2. В общем случае тензоры , могут быть любыми, т.е. они не являются ни симметричными, ни антисимметричными, ни диагональными, ни шаровыми. Это связано с тем, что векторы возмущений ,  могут быть по-разному направлены относительно соответствующих векторов ускорений
могут быть по-разному направлены относительно соответствующих векторов ускорений  ,
, . В то же время, «нормальный» тензор
. В то же время, «нормальный» тензор  является шаровым, а «нормальный» тензор
является шаровым, а «нормальный» тензор  является симметричным:
является симметричным:
 ,
,  .
.
3. Масса и моменты инерции проявляют себя только в неравномерных движениях (поступательном и угловом). Если объект движется прямолинейно и равномерно, то массу определить невозможно:
 ,
,  ,
, 

Аналогично, если объект вращается равномерно, то моменты инерции определить невозможно:
 ,
,  ,
, 

Таким образом, построить тензор эффективных масси тензор эффективных моментов инерции можно только при наличии ускорений в движении ЛА. На практике неравномерности в поступательном и угловом движениях ЛА имеют место, в основном, при его ускорении и торможении на ВПП (на этапах взлёта и посадки). Поэтому метод оценки текущего динамического состояния ЛА, основанный на использовании эффективных инерционных характеристик, можно использовать только на этих участках движения ЛА.
4. Предложенные «эффективные инерционные характеристики» по существу являются развитием и обобщением понятия «присоединённая масса», которая используется при рассмотрении неравномерных движений объектов в сплошной среде [9].
2. Определение тензора эффективных масс
 и тензора эффективных моментов инерции
и тензора эффективных моментов инерции

Вместо тензоров  ,
,  рассмотрим тензоры
рассмотрим тензоры  ,
,  , представляющие собой отклонения «эффективных» тензоров , от их «нормальных» аналогов , :
, представляющие собой отклонения «эффективных» тензоров , от их «нормальных» аналогов , :
 ,
,  .
.
Из уравнений (5) получаем соотношения для тензоров , :
Математически эти равенства имеют одинаковую структуру, поэтому продемонстрируем расчёт тензоров , на одном общем соотношении, которое запишем в виде:
 ,где
,где . (6)
. (6)
Здесь:  – аналог тензоров и ;
– аналог тензоров и ;  – аналог векторов
– аналог векторов и
и  ;
; – аналог векторов
– аналог векторов  и
и  . Предполагается, что векторы
. Предполагается, что векторы  ,
,  известны; необходимо найти тензор
известны; необходимо найти тензор  .
.
Рассмотрим некоторую декартову систему координат  (например, связанную с ВС). Разложим векторы
(например, связанную с ВС). Разложим векторы  ,
,  и тензор
и тензор  по базисным векторам этой системы:
по базисным векторам этой системы:
 ,
,  ,
,  , (7)
, (7)
где:  – квадратная матрица, составленная из проекций тензора
– квадратная матрица, составленная из проекций тензора  ;
;  ,
,  – матрицы-столбцы, составленные из проекций векторов
– матрицы-столбцы, составленные из проекций векторов  ,
,  ;
;  – матрица-столбец (базис), составленная из базисных векторов
– матрица-столбец (базис), составленная из базисных векторов  ,
, ,
, :
:
 ,
,  ,
,  ,
,  .
.
Подставив разложения (7) в (6), получим вместо тензорного соотношения матричное соотношение:
 , где
, где  . (8)
. (8)
Здесь – матрицы-столбцы , известны; необходимо найти квадратную матрицу . Перейдём в (8) от матричного вида к скалярному ; получим три скалярных соотношения:
 (9)
(9)
Полученные равенства представляют собой систему из 3 линейных уравнений для 9 неизвестных – элементов матрицы . Выразим диагональные элементы  ,
,  ,
,  через вне диагональные
через вне диагональные ,
,  ,
,  ,
,  ,
,  ,
,  :
:
 (10)
(10)
Формулы (10) представляют собой решение системы (9) в общем виде, в котором переменные, , , , , рассматриваются как свободные. Варьируя эти переменные, получим бесконечное множество решений. Однако нам нужно одно решение, которое было бы в некотором смысле оптимальным. Рассмотрим следующий алгоритм построения такого решения.
Обобщённой характеристикой объектов типа «вектор» и «тензор» является их норма. Норма характеризует размер объекта, степень отклонения его от нуля. В линейной алгебре для векторов и тензоров рассматриваются различные нормы. При решении практических задач норму выбирают, исходя из физики рассматриваемого процесса. В задачах классической механики двухвалентный тензор рассматривается как набор из трёх взаимосвязанных векторов. Норма любого вектора в евклидовом пространстве определяется через скалярное произведение вектора самого на себя:
 ,
,
 .
.
При выборе нормы для тензора желательно чтобы она была согласована с нормой вектора. С этой точки зрения наиболее подходящей является норма Фробениуса [10]:

 . (11)
. (11)
Здесь знак « » означает двойное скалярное произведение тензора на тензор, которое представляет собой внешнее произведение двухвалентного тензора на двухвалентный тензор с последующими двумя свёртками по двум индексам. Подставим в соотношение (11) вместо
» означает двойное скалярное произведение тензора на тензор, которое представляет собой внешнее произведение двухвалентного тензора на двухвалентный тензор с последующими двумя свёртками по двум индексам. Подставим в соотношение (11) вместо  ,
,  ,
,  выражения (10):
выражения (10):
Как видим, построенная таким образом норма искомого тензора  зависит от 6 свободных параметров , , , , , . Если мы будем брать очень большие значения свободных параметров, то норма будет стремиться к бесконечности. С другой стороны, норма не может быть меньше нуля. Следовательно, существуют значения свободных параметров, доставляющие минимальное значение норме. Найдём их. Для этого возьмём частные производные от
зависит от 6 свободных параметров , , , , , . Если мы будем брать очень большие значения свободных параметров, то норма будет стремиться к бесконечности. С другой стороны, норма не может быть меньше нуля. Следовательно, существуют значения свободных параметров, доставляющие минимальное значение норме. Найдём их. Для этого возьмём частные производные от  по всем свободным параметрам и приравняем их нулю. Получим систему из 6 линейных уравнений для 6 неизвестных,, , , , :
по всем свободным параметрам и приравняем их нулю. Получим систему из 6 линейных уравнений для 6 неизвестных,, , , , :
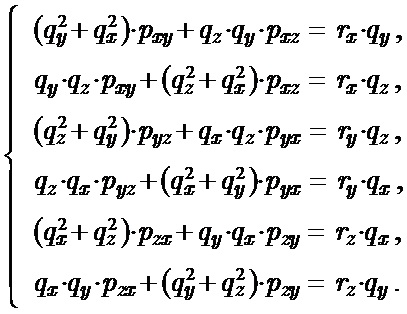
Решение этой системы уравнений имеет вид:
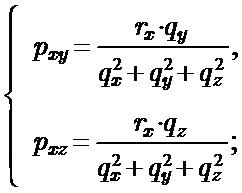
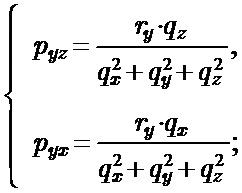
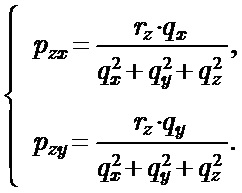 (12)
(12)
Подставив эти выражения в формулы (10), найдём величины  ,
, ,
, :
:
 ,
,  ,
,  . (13)
. (13)
Полученные формулы (12), (13) позволяют при заданных векторах  ,
,  рассчитать норму тензора
рассчитать норму тензора  . Полученная норма будет минимальной среди всех возможных норм вида (11). Найдём её. Для этого подставим выражения (12),(13) в формулу (11). После преобразований получим:
. Полученная норма будет минимальной среди всех возможных норм вида (11). Найдём её. Для этого подставим выражения (12),(13) в формулу (11). После преобразований получим:
 , при
, при  .
.
Как видим, норма тензора  есть отношение норм исходных векторов
есть отношение норм исходных векторов  ,
,  . По существу, построенный тензор
. По существу, построенный тензор  представляет собой частное от деления вектора
представляет собой частное от деления вектора  на ненулевой вектор
на ненулевой вектор  .
.
3. Расчёт проекций тензора эффективных масс
Соотношения (12), (13), применённые к тензору, дают следующие формулы для расчёта его компонент:
 (14)
(14)
Используя первое соотношение из (4), находим расчётные формулы для компонент тензора эффективных масс  :
:

Формулы (14) можно записать в более компактном виде – матричном или векторно-тензорном:
 ,
,  .
.
Здесь знак « » означает внешнее произведение вектора (одновалентного тензора) на вектор (одновалентный тензор), результатом является двухвалентный тензор.
» означает внешнее произведение вектора (одновалентного тензора) на вектор (одновалентный тензор), результатом является двухвалентный тензор.
4. Расчёт проекций тензора эффективных моментов инерции
Соотношения (12), (13), применённые к тензору  , дают следующие формулы для расчёта его компонент:
, дают следующие формулы для расчёта его компонент:
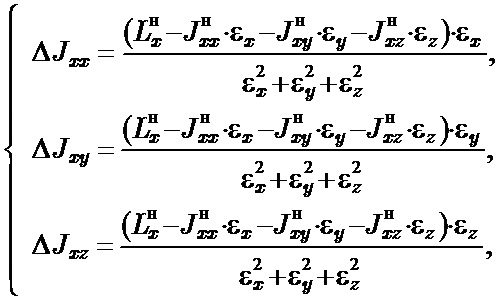
 (15)
(15)
Используя второе соотношение из (4), находим расчётные формулы для компонент тензора эффективных моментов инерции  :
:
Формулы (15) можно записать в более компактном виде – матричном или векторно-тензорном:
 ,
,  .
.
Здесь знак «» означает внешнее произведение вектора (одновалентного тензора) на вектор (одновалентный тензор), результатом является двухвалентный тензор.
5. Определение инвариантов тензоров
и
Векторы и тензоры представляют собой математические структуры, которые в любой декартовой СК задаются набором проекций. Однако при анализе таких структур как единого объекта, проекции не подходят, поскольку они зависят от используемой системы координат. Нужны величины, которые характеризуют эти объекты в целом, независимо от выбранной системы координат. Такими величинами являются инварианты векторов и тензоров.
Любой вектор  имеет один инвариант – длину, которая одновременно является его нормой:
имеет один инвариант – длину, которая одновременно является его нормой:
 .
.
Любой двухвалентный тензор  характеризуется тремя инвариантами– линейным
характеризуется тремя инвариантами– линейным  , квадратичным
, квадратичным  и кубичным
и кубичным  , которые вычисляются через его проекции по формулам [10]:
, которые вычисляются через его проекции по формулам [10]:
 , (16)
, (16)
 , (17)
, (17)
 . (18)
. (18)
Применив формулы (16)-(18) для тензора , найдём его инварианты:
Применив формулы (16)-(18) для тензора  , найдём его инварианты:
, найдём его инварианты:
Как видим, квадратичные и кубичные инварианты тензоров , являются нулевыми, т.е. никак не зависят от параметров движения ЛА, поэтому для нас интереса не представляют. Линейные же инварианты зависят от параметров движения ЛА, поэтому их можно использовать для построения показателей динамического состояния ЛА. Отметим, что формулы для линейных инвариантов можно записать в более компактном виде – матричном или векторно-тензорном:
 ,
,  ;
;
 ,
,  .
.
6. Интегральные показатели динамического состояния ЛА при его ускорении и торможении по ВПП
На основе полученных линейных инвариантов сформируем два безразмерных интегральных показателя динамического состояния ЛА: – относительный линейный инвариант тензора отклонений масс:
 ; (19)
; (19)
– относительный линейный инвариант тензора отклонений моментов инерции:
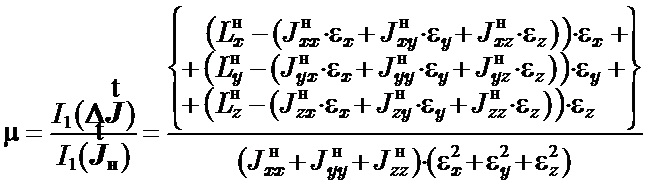 . (20)
. (20)
Здесь:  ,
,  – линейные инварианты тензора масс и тензора моментов инерции, соответствующие нормальному (расчётному) режиму движения ЛА по ВПП:
– линейные инварианты тензора масс и тензора моментов инерции, соответствующие нормальному (расчётному) режиму движения ЛА по ВПП:
 ,
,  .
.
Исходя из полученных результатов предлагается в блоке безопасного взлёта и безопасной посадки 23 для обобщённой оценки динамического состояния ЛА при его ускорении и торможении по ВПП использовать интегральные показатели и , построенные на основе эффективных инерционных характеристик, которые представлены тензором эффективных масс  и тензором эффективных моментов инерции
и тензором эффективных моментов инерции  . Эти показатели показывают, насколько движение ЛА отличается от нормального (расчётного) режима. Если неравномерности движения ЛА находятся в допустимых пределах, то значения показателей будут близки к нулю (при идеальном движении ЛА будем иметь
. Эти показатели показывают, насколько движение ЛА отличается от нормального (расчётного) режима. Если неравномерности движения ЛА находятся в допустимых пределах, то значения показателей будут близки к нулю (при идеальном движении ЛА будем иметь  и
и  ). Если же неравномерности движения будут сильно отличаться от расчётных, то и значения показателей , будут сильно отличаться от нулевых значений.
). Если же неравномерности движения будут сильно отличаться от расчётных, то и значения показателей , будут сильно отличаться от нулевых значений.
7. Использование показателей
 ,
,
 для оценки динамического состояния ЛА при его ускорении и торможении на ВПП
для оценки динамического состояния ЛА при его ускорении и торможении на ВПП
На основе показателей , в блоке безопасного взлёта и безопасной посадки 23 осуществляется система контроля текущего динамического состояния ЛА на участках движения по ВПП в процессе взлёта и посадки, когда его движение является ускоренным. По степени отличия показателей , от нуля делается вывод о текущем динамическом состоянии ЛА и информируется экипаж о необходимых действиях.
При этом, за основу берётся модель движения ЛА (2) и строится стохастическая модель его движения. Далее для конкретного аэродрома, для конкретного ЛА, для конкретных атмосферных условий и ветра, а также для конкретных условий взлёта и посадки рассчитывается семейство возможных траекторий движения ЛА по ВПП. Одновременно для каждой такой траектории по формулам (19), (20) рассчитываются значения показателей , . В результате определяем диапазоны допустимых значений этих показателей:
 ,
,  . (21)
. (21)
Граничные значения  ,
,  и
и  ,
,  (для перечисленных выше условий) записываются в память бортового вычислителя.
(для перечисленных выше условий) записываются в память бортового вычислителя.
В процессе реального взлёта или посадки измеряются проекции векторов поступательных ,  и угловых ,
и угловых ,  скоростей и ускорений. На основе этих данных по модели, соответствующей нормальному движения ЛА, вычисляются проекции вектора равнодействующей силы
скоростей и ускорений. На основе этих данных по модели, соответствующей нормальному движения ЛА, вычисляются проекции вектора равнодействующей силы  и проекции вектора равнодействующего момента
и проекции вектора равнодействующего момента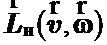 [8]. После чего по формулам (19),(20) рассчитываем значения показателей , . Если полученные значения , вышли за границы допустимых диапазонов (21), то это означает, что режим движения ЛА не соответствует нормальному – необходимо прекратить взлёт или прекратить посадку.
[8]. После чего по формулам (19),(20) рассчитываем значения показателей , . Если полученные значения , вышли за границы допустимых диапазонов (21), то это означает, что режим движения ЛА не соответствует нормальному – необходимо прекратить взлёт или прекратить посадку.
Отметим также, что при взлёте и посадке ЛА также совершает различные движения по аэродрому. При рассчитываемом ресурсе в 60000 лётных часов ЛА за время эксплуатации совершает в среднем 20000 рейсов продолжительностью 3 часа каждый [11]. В каждом рейсе при разбеге на взлёте самолёт пробегает по ВПП примерно 1500 метров и при пробеге на посадке примерно 1500 метров. Кроме того, в процессе выруливания со стоянки перед полётом и заруливания на стоянку после полёта самолёт пробегает ещё не менее 2000 метров. Следовательно, за время службы самолёт пробегает по аэродрому примерно 100000 км с весьма высокой скоростью (в условиях интенсивной эксплуатации аэропортов движение по рулёжным дорожкам происходит на скоростях до 70 км/ч ). При движении по аэродрому достаточно часто имеют место столкновения ЛА между собой и с аэродромными препятствиями.
Перед запуском двигателей ЛА задатчик постоянных величин 31 блока безопасного движения по аэродрому 24 и задатчик постоянных величин 27 блока безопасного взлёта и безопасной посадки 23 системы безопасного движения по аэродрому 19 заводят в бортовые вычислители 33 и 28 постоянные величины касающиеся ЛА (из руководства по лётной эксплуатации, технического описания), ВПП (уклон, длина, ширина и т.д.), условий взлёта-посадки (информация от аэродромной метеослужбы о температуре окружающего воздуха, атмосферном давлении, скорости и направлении ветра) и т.д. После запуска двигателей и начала движения ЛА по рулёжной дорожке (РД) запускается блок безопасного движения по аэродрому 24, информирующий экипаж ЛА об опасности его столкновения с подвижными и неподвижными препятствиями. После выруливания ВС на ВПП блок безопасного движения по аэродрому 24 отключается и в работу вступает блок безопасного взлёта и безопасной посадки 23. При этом, от блоков 25 и 26 в бортовой вычислитель оценки возможности выкатывания ЛА за пределы ВПП поступают необходимые данные для определения показателей и .
После начала движения ЛА в процессе его разбега по ВПП в блоке безопасного взлёта и безопасной посадки 23 непрерывно рассчитываются показатели , . При выходе значений показателей за допустимые диапазоны для предупреждения аварийной ситуации через БРАС 20 осуществляется информирование экипажа и, при необходимости, прерывание взлёта. После взлёта ЛА блок безопасного взлёта и безопасной посадки 23 отключается и далее включается на этапе посадки ЛА после касания колёс шасси поверхности ВПП. Так же, как и при взлёте, в случае выхода значений , за допустимые диапазоны для предупреждения аварийных ситуаций через БРАС 20 осуществляется информирование экипажа и, при необходимости, дополнительное торможение ЛА или прерывание посадки (уход на второй круг). После завершения посадки и сруливания ЛА с ВПП на рулежную дорожку блок безопасного взлёта и безопасной посадки 23 отключается и в работу включается блок безопасного движения по аэродрому 24, который работает до момента остановки ЛА на стоянке.
Таким образом, предлагаемое техническое решение позволяет повысить безопасность полёта ЛА при взлёте, посадке и движении ЛА по аэродрому за счёт препятствования продольному и боковому выкатыванию самолёта за пределы ВПП, а также оперативного информирования экипажа ЛА о необходимости совершения действий, предотвращающих лётные происшествия, аварии и катастрофы. Кроме того, обеспечивается безопасное движение ЛА по аэродрому.
Источники информации
1. Патент РФ № 2128854 «Система поддержки экипажа в опасных ситуациях», МПК G05D 1/00;
2. Патент РФ № 2541902 «Интеллектуальная система поддержки экипажа», МПК G06F 17/40, G08G 5/00;
3. Патент РФ № 2598130 «Интеллектуальная система поддержки экипажа», МПК G05D 1/00, B64D 45/00;
4. Глубокая М.Г. Применение методов искусственного интеллекта при контроле взлёта магистрального самолёта. // Искусственный интеллект, 2002, № 3, с. 376-383;
5. Глубокая М.Г. Метод контроля процесса взлёта по функции эффективной взлётной массы. // Учёные записки ЦАГИ, 2009, Том ХХХХ, № 1, с. 82-91;
6. Глубокая М.Г. Пути решения проблемы безопасности на этапе взлёта. // Навигация и управление летательными аппаратами, 2010, № 2, с. 74-87;
7. Себряков Г.Г., Мужичек С.М., Маслова Л.А., Хрулин С.В. Использование эффективных инерционных характеристик в качестве показателей динамического состояния воздушного судна при взлёте и посадке. // 5 ВНТК «Моделирование авиационных систем», 29-30 ноября 2023 года, ФАУ «ГосНИИАС», сборник тезисов докладов. – Раменское: Издательская группа «Круглый стол», 2023, с. 173-175;
8. Мужичек С.М., Хрулин С.В., Скрынников А.А., Набоков С.А., Ефанов В.В. Интегральный показатель технической исправности летательного аппарата.//Вестник компьютерных и информационных технологий, 2018, №5 (167), с.10-18;
9. Риман И.С., Крепс Р.Л. Присоединённые массы тел различной формы. // Труды ЦАГИ, 1947, № 635, с. 11-21;
10. Вильчевская Е.Н. Тензорная алгебра и тензорный анализ. – Санкт-Петербург: «Политех-Пресс», 2019, 128 с;
11. Кубланов М.С. Математическое моделирование задач лётной эксплуатации воздушных судов на взлёте и посадке: Монография. – М.: РИО МГТУ ГА, 2013, 270 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2022 |
|
RU2773981C1 |
| Способ интеллектуальной поддержки экипажа | 2020 |
|
RU2767406C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2023 |
|
RU2801013C1 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2339547C9 |
| Блок интеллектуальной поддержки | 2020 |
|
RU2770996C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2020 |
|
RU2749214C1 |
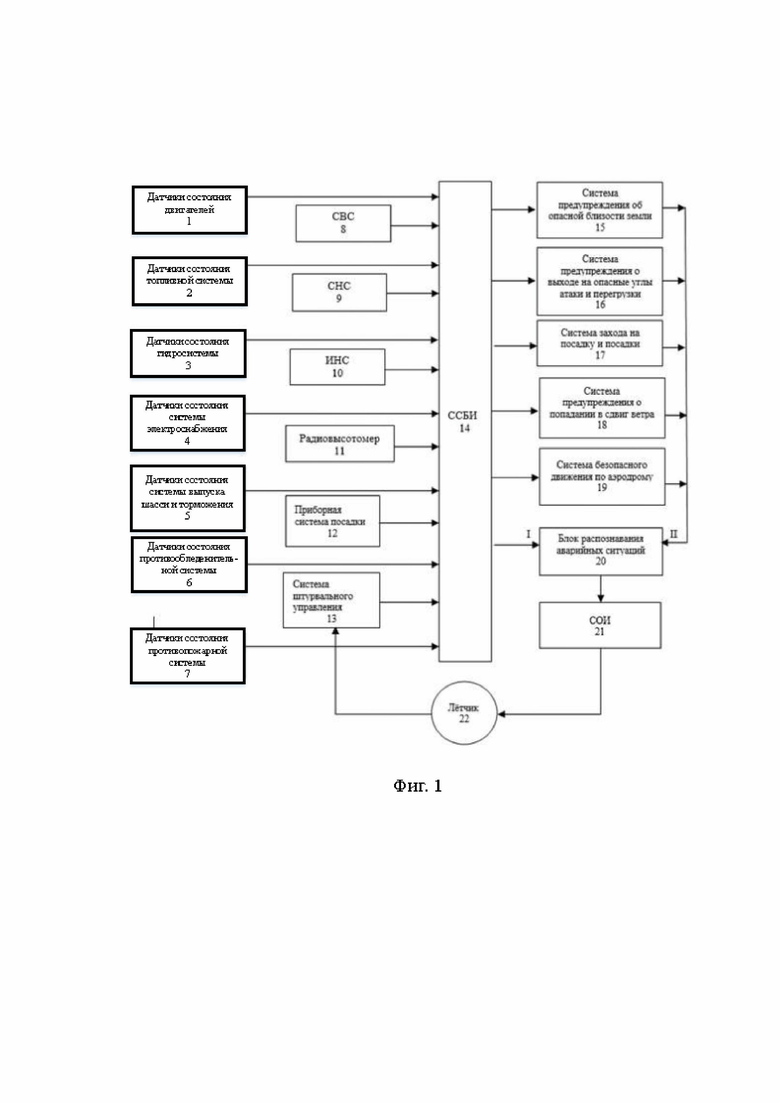
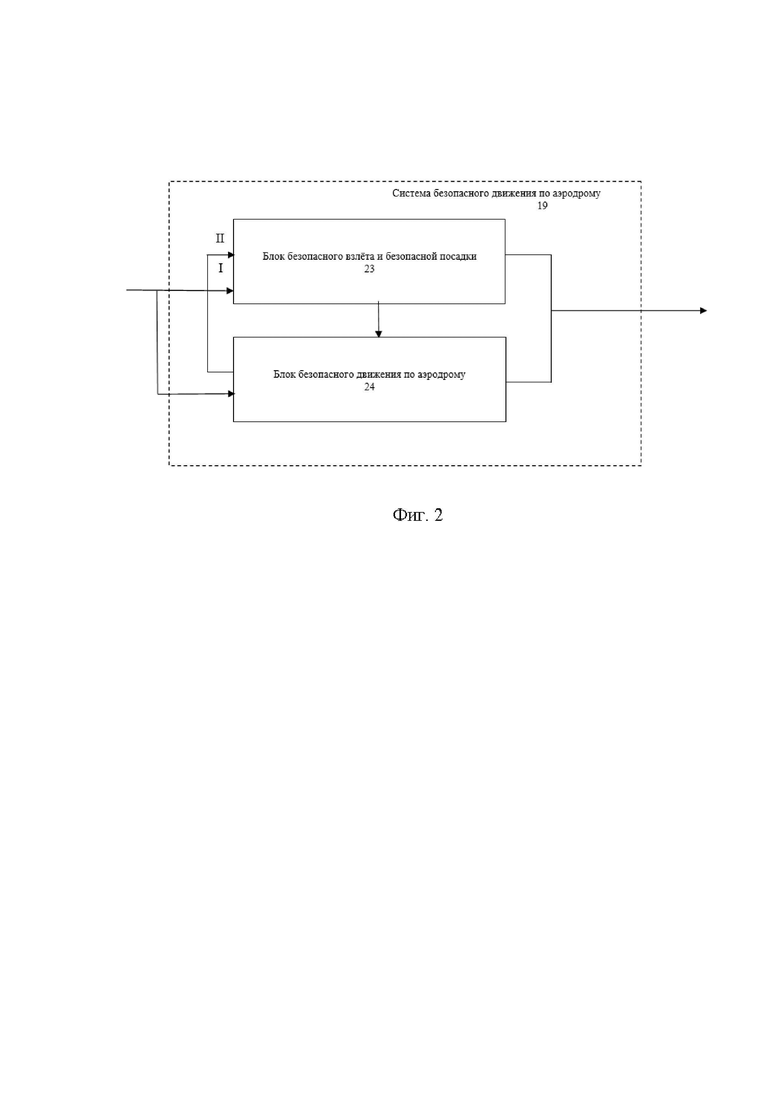
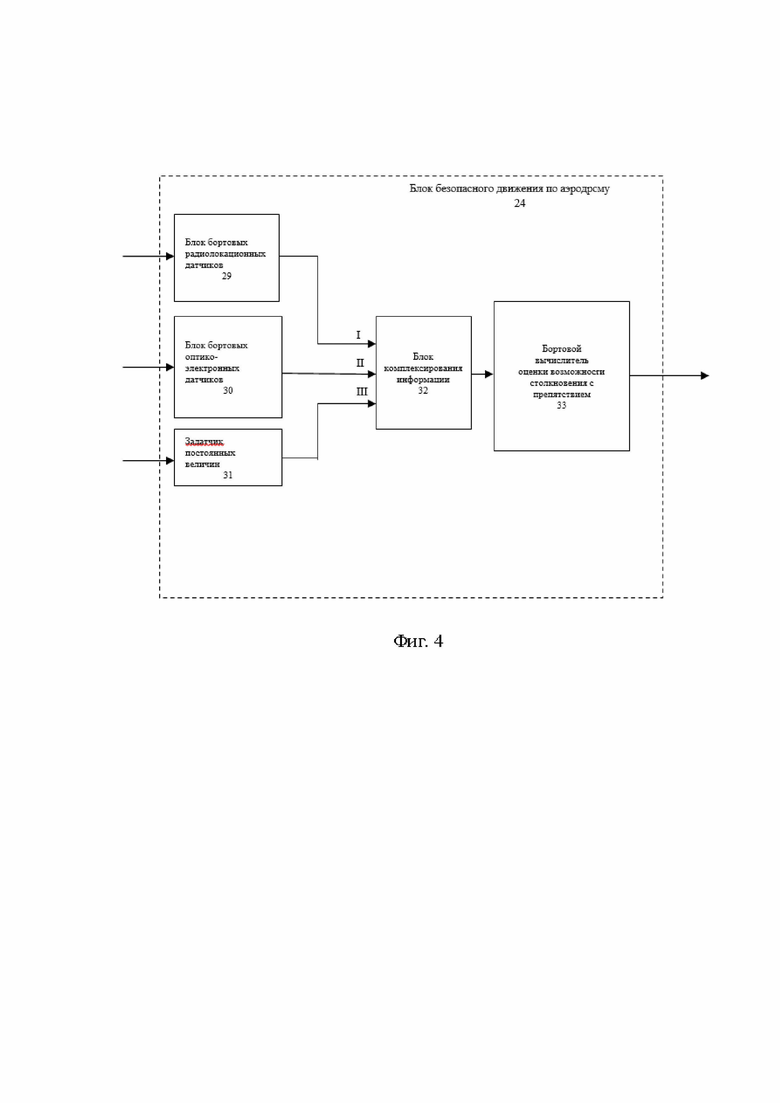
Интеллектуальная система поддержки экипажа летательного аппарата (ЛА) содержит датчики состояния двигателей, топливной системы, гидросистемы, системы электроснабжения, системы выпуска шасси и торможения, противообледенительной системы, противопожарной системы, системы воздушных сигналов, а также спутниковую навигационную систему, инерциальную навигационную систему, радиовысотомер, приборную систему посадки, систему штурвального управления, систему сбора бортовой информации (ССБИ), систему отображения информации (СОИ), блок распознавания аварийных ситуаций (БРАС), систему предупреждения об опасной близости земли (СПОБЗ), систему предупреждения о выходе на опасные значения угла атаки и перегрузки (СПВОЗ), систему контроля захода на посадку и посадки (СКЗП), систему предупреждения о попадании в сдвиг ветра (СППСВ), систему безопасного движения по аэродрому, включающую блок безопасного взлёта и безопасной посадки ЛА и блок безопасного движения по аэродрому. Обеспечивается повышение безопасности движения ЛА при взлёте, посадке и движении ЛА по аэродрому путем препятствования продольному и боковому выкатыванию ЛА за пределы ВПП при взлёте и посадке. 2 з.п. ф-лы, 4 ил.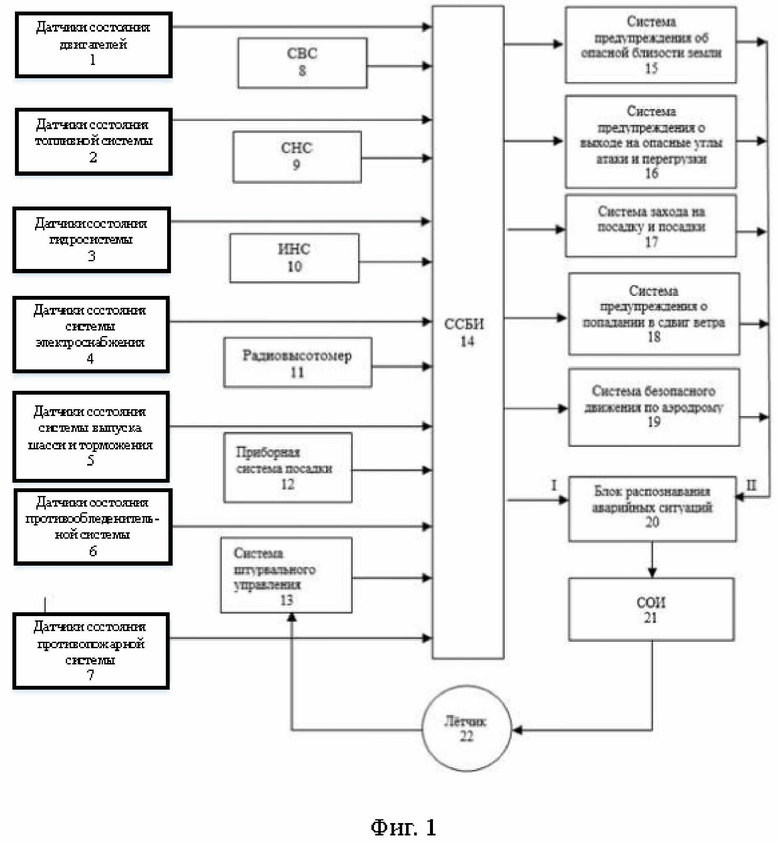
1. Интеллектуальная система поддержки экипажа летательного аппарата, включающая в своем составе датчики состояния двигателей, топливной системы, гидросистемы, системы электроснабжения, системы выпуска шасси и торможения, противообледенительной системы, противопожарной системы, системы воздушных сигналов, спутниковую навигационную систему, инерциальную навигационную систему, радиовысотомер, приборную систему посадки, систему штурвального управления, систему сбора бортовой информации (ССБИ), систему отображения информации (СОИ), блок распознавания аварийных ситуаций (БРАС), систему предупреждения об опасной близости земли (СПОБЗ), систему предупреждения о выходе на опасные значения угла атаки и перегрузки (СПВОЗ), систему контроля захода на посадку и посадки (СКЗП), систему предупреждения о попадании в сдвиг ветра (СППСВ), при этом система СПОБЗ выполнена с возможностью определения на основе измерения параметров сигналов бортовых датчиков минимального значения допустимой высоты над землёй в экстремальных условиях атмосферы для передачи в БРАС с целью формирования информации принятия решения об условиях близости поверхности земли; система СПВОЗ выполнена с возможностью измерения параметров бортовых датчиков угла атаки, угла крена, нормальной перегрузки, угловой скорости тангажа, определения предельно допустимых разностей между опасными и пороговыми значениями по параметрам сигналов угла атаки и его производной, сигналов вертикальной перегрузки и её производной и допустимых значений сигналов угла атаки, сигналов допустимых значений продольной перегрузки, зависящих от числа Маха и веса летательного аппарата (ЛА), а также с возможностью фильтрации сигналов угловой скорости, передаваемых в БРАС для формирования информации предупреждения о выходе на опасные углы атаки и перегрузки; система СКЗП выполнена с возможностью формирования сигналов принятия решений об условиях выхода за пределы допустимых отклонений на основе измерений параметров сигналов бортовых датчиков отклонения в пространстве траектории ЛА; система СППСВ выполнена с возможностью определения превышения измеренных и заданных значений при попадании ЛА в условия сдвига ветра и формирования в БРАС сигнала принятия решения о критичности условий попадания в сдвиг ветра; входы систем ССБИ, СПОБЗ, СКЗП, СППСВ вместе с первым входом БРАС соединены с системой ССБИ, выходы указанных систем соединены с вторым входом БРАС, выход которого подключён к СОИ, установленной перед лётчиком экипажа, взаимодействующего с системой штурвального управления, отличающаяся тем, что дополнительно введена система безопасного движения по аэродрому, состоящая из блока безопасного взлёта и безопасной посадки ЛА, определяющего безразмерные интегральные показатели динамического состояния ЛА, а именно относительный линейный инвариант тензора отклонений масс и относительный линейный инвариант тензора отклонений моментов инерции, а также из блока безопасного движения по аэродрому, при этом выход ССБИ соединен с первым входом блока безопасного взлета и безопасной посадки и входом блока безопасного движения по аэродрому, выход блока безопасного движения по аэродрому соединён со вторым входом блока безопасного взлёта и безопасной посадки, выход которого соединён с входом блока безопасного движения по аэродрому, выходы блока безопасного движения по аэродрому и блока безопасного взлёта и безопасной посадки объединены и являются выходом системы безопасного движения по аэродрому, который соединён со вторым входом БРАС.
2. Интеллектуальная система поддержки экипажа летательного аппарата по п.1, отличающаяся тем, что блок безопасного взлёта и безопасной посадки содержит блок данных бортовых измерительных систем, блок данных бортовых информационных систем, задатчик постоянных величин, бортовой вычислитель оценки возможности выкатывания ЛА за пределы взлетно-посадочной полосы (ВПП), при этом выход блока данных бортовых измерительных систем соединён с первым входом бортового вычислителя оценки возможности выкатывания ЛА за пределы ВПП, выход блока данных бортовых информационных систем соединён со вторым входом бортового вычислителя оценки возможности выкатывания ЛА за пределы ВПП, выход задатчика постоянных величин соединён с третьим входом бортового вычислителя оценки возможности выкатывания ЛА за пределы ВПП, выход бортового вычислителя оценки возможности выкатывания ЛА за пределы ВПП является выходом блока безопасного взлёта и безопасной посадки.
3. Интеллектуальная система поддержки экипажа летательного аппарата по п.1, отличающаяся тем, что блок безопасного движения по аэродрому содержит блок бортовых радиолокационных датчиков, блок бортовых оптико-электронных датчиков, задатчик постоянных величин, блок комплексирования информации, бортовой вычислитель оценки возможности столкновения с препятствием, при этом выход блока бортовых радиолокационных датчиков соединён с первым входом блока комплексирования информации, выход блока бортовых оптико-электронных датчиков соединён со вторым входом блока комплексирования информации, выход задатчика постоянных величин соединён с третьим входом блока комплексирования информации, выход блока комплексирования информации соединён с входом бортового вычислителя оценки возможности столкновения с препятствием, выход бортового вычислителя оценки возможности столкновения с препятствием является выходом блока безопасного движения по аэродрому.
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| Информационно-управляющий комплекс с интеллектуальной поддержкой экипажа | 2020 |
|
RU2755097C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| Способ интеллектуальной поддержки экипажа | 2020 |
|
RU2767406C1 |
| WO 2017205455 A1, 30.11.2017 | |||
| US 20060167598 A1, 27.07.2006. | |||

