Изобретение относится к области техники радиотехнических средств передачи данных под водой и может быть использовано, например, для обмена данными автономного необитаемого подводного аппарата и причального устройства.
Известны способы передачи данных под водой, использующие переменное магнитное поле (см., например, статью Maurice Hott, Peter A. Hoeher, and Sebastian F. Reinecke, "Magnetic Communication Using High-Sensitivity Magnetic Field Detectors," Sensors 2019, 19, 3415; doi:10.3390/s19153415). Однако передача данных с использованием указанной технологии возможна, если магнитные оси передатчика и приемника данных строго ориентированы друг по отношению к другу.
Наиболее близким по технической сущности к предполагаемому изобретению является «Способ измерения дальности под водой при произвольном положении в горизонтальной плоскости продольной оси приемной рамочной магнитной антенны», описанный в Патенте на изобретение №2727267 Россия, МПК G01S 15/08, опубл. 21.07.2020, бюл. №21. Описанный способ ориентирован на измерение дальности под водой, но может быть использован и для передачи данных путем введения модуляции сигнала несущей низкочастотного сигнала, возбуждающего рамочную магнитную антенну, как это описано в Патенте на изобретение №2726388 Россия, МПК G01S 15/08, опубл. 13.07.2020, бюл. №20.
По описанному способу (Патент на изобретение №2727267) измерения дальности под водой на измерительной станции первоначально генерируют два непрерывных электрических колебания низкой частоты с одинаковыми частотами, но со сдвигом фаз между ними в 90°. При этом непрерывные электрические колебания низкой частоты с нулевой фазой подают на клеммы первой передающей рамочной магнитной антенны измерительной станции, а непрерывные электрические колебания низкой частоты со сдвигом по фазе на 90° относительного непрерывных электрических колебаний низкой частоты с нулевой фазой, подают на клеммы второй передающей рамочной магнитной антенны измерительной станции. При этом продольные оси первой и второй передающих рамочных магнитных антенн измерительной станции располагают взаимно перпендикулярно в горизонтальной плоскости, и излучают тем самым переменное магнитное поле низкой частоты круговой поляризации в горизонтальной плоскости. При этом переменное магнитное поле низкой частоты круговой поляризации в горизонтальной плоскости улавливают приемной рамочной магнитной антенной автономного необитаемого подводного аппарата, продольную ось которой располагают в горизонтальной плоскости, причем положение продольной оси этой приемной рамочной магнитной антенны автономного необитаемого подводного аппарата может быть произвольным.
Указанный способ предполагает однонаправленную передачу сигнала от передающих рамочных магнитных антенн измерительной станции, продольные оси которых взаимно перпендикулярны, и они возбуждены со сдвигом фаз 90°, к приемной рамочной магнитной антенне автономного необитаемого подводного аппарата, продольная ось которой в горизонтальной плоскости может быть расположена произвольно. Однако передача данных, как правило, сопровождается двухсторонним обменом данных. При этом описанная схема расположения передающих антенн измерительной станции и приемной антенны автономного необитаемого подводного аппарата и передачи сигнала не является взаимной. Если продольная ось рамочной магнитной антенны автономного необитаемого подводного аппарата будет перпендикулярна направлению на измерительную станцию, то ни одна ни другая рамочная магнитная антенна измерительной станции сигнал не примет и передача данных от автономного необитаемого подводного аппарата к измерительной станции будет невозможна.
Целью настоящего изобретения является реализация возможности передачи данных под водой как от измерительной станции к автономному необитаемому подводному аппарату, так и от автономного необитаемого подводного аппарата к измерительной станции при произвольном их взаимном положении в горизонтальной плоскости.
Поставленная цель достигается тем, по способу двусторонней передачи данных под водой при произвольном взаимном положении в горизонтальной плоскости продольных осей измерительной станции и автономного необитаемого подводного аппарата, на измерительной станции генерируют два непрерывных электрических колебания низкой частоты с одинаковыми частотами, но со сдвигом фаз между ними в 90°, каждый из которых модулируют входным информационным сигналом измерительной станции, причем непрерывные электрические колебания низкой частоты с нулевой фазой подают на клеммы второй рамочной магнитной антенны измерительной станции, а непрерывные электрические колебания низкой частоты со сдвигом по фазе на 90° относительного непрерывных электрических колебаний низкой частоты с нулевой фазой, подают на клеммы первой рамочной магнитной антенны измерительной станции, причем продольные оси первой и второй рамочных магнитных антенн измерительной станции, располагают взаимно перпендикулярно в горизонтальной плоскости, и излучают тем самым модулированное переменное магнитное поле низкой частоты круговой поляризации в горизонтальной плоскости, при этом модулированное переменное магнитное поле низкой частоты круговой поляризации в горизонтальной плоскости улавливают второй рамочной магнитной антенной автономного необитаемого подводного аппарата, причем сигнал с выхода этой рамочной магнитной антенны подают на демодулятор сигналов автономного необитаемого подводного аппарата и получают выходной информационный сигнал на автономном необитаемом подводном аппарате, после чего на измерительной станции генерирования низкочастотных сигналов прекращают, а на автономном необитаемом подводном аппарате генерируют два непрерывных электрических колебания низкой частоты с одинаковыми частотами, но со сдвигом фаз между ними в 90°, каждый из которых модулируют входным информационным сигналом автономного необитаемого подводного аппарата, причем непрерывные электрические колебания низкой частоты с нулевой фазой подают на клеммы второй рамочной магнитной антенны автономного необитаемого подводного аппарата, а непрерывные электрические колебания низкой частоты со сдвигом по фазе на 90° относительного непрерывных электрических колебаний низкой частоты с нулевой фазой, подают на клеммы первой рамочной магнитной антенны автономного необитаемого подводного аппарата, причем продольные оси первой и второй рамочных магнитных антенн автономного необитаемого подводного аппарата располагают взаимно перпендикулярно в горизонтальной плоскости, и излучают тем самым, модулированное переменное магнитное поле низкой частоты круговой поляризации в горизонтальной плоскости, при этом модулированное переменное магнитное поле низкой частоты круговой поляризации в горизонтальной плоскости улавливают второй рамочной магнитной антенной измерительной станции, причем сигнал с выхода этой рамочной магнитной антенны подают на демодулятор сигналов измерительной станции и получают выходной информационный сигнал на измерительной станции, при этом получают двустороннюю передачу данных, причем взаимное расположение в горизонтальной плоскости антенн и собственно продольных осей автономного необитаемого подводного аппарата и измерительной станции может быть произвольным.
Сравнение предполагаемого изобретения с уже известными способами и прототипом показывает, что заявляемый способ проявляет новые технические свойства, заключающиеся в возможности двусторонней передачи данных под водой между измерительной станцией и автономным необитаемым подводным аппаратом при произвольном положении в горизонтальной плоскости их продольных осей.
Эти свойства предполагаемого изобретения являются новыми, так как в способе прототипе в силу присущих ему недостатков, заключающихся в существовании односторонней передачи данных от измерительной станции к автономному необитаемому подводному аппарату, передача данных в обратном направлении при определенном положении продольной оси автономного необитаемого подводного аппарата может быть невозможна.
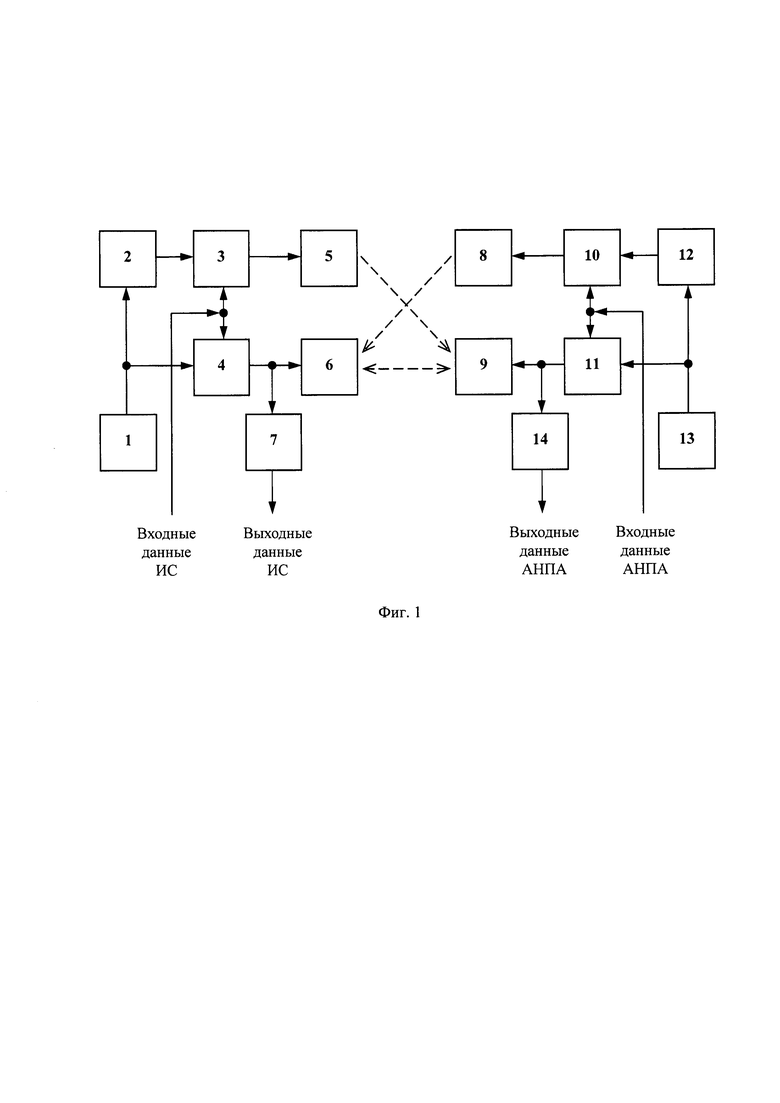
Указанный способ двусторонней передачи данных под водой при произвольном взаимном положении в горизонтальной плоскости продольных осей измерительной станции и автономного необитаемого подводного аппарата можно реализовать с помощью устройства, показанного на фиг. 1.
Устройство двусторонней передачи данных под водой при произвольном взаимном положении в горизонтальной плоскости продольных осей измерительной станции и автономного необитаемого подводного аппарата состоит из генератора непрерывных электрических колебаний низкой частоты измерительной станции 1, фазовращателя измерительной станции 2, первого модулятора измерительной станции 3, второго модулятора измерительной станции 4, первой рамочной магнитной антенны измерительной станции 5, второй рамочной магнитной антенны измерительной станции 6, демодулятора измерительной станции 7, первой рамочной магнитной антенны автономного необитаемого подводного аппарата 8, второй рамочной магнитной антенны автономного необитаемого подводного аппарата 9, первого модулятора автономного необитаемого подводного аппарата 10, второго модулятора автономного необитаемого подводного аппарата 11, фазовращателя автономного необитаемого подводного аппарата 12, генератора непрерывных электрических колебаний низкой частоты автономного необитаемого подводного аппарата 13, демодулятора автономного необитаемого подводного аппарата 14.
Выход генератора непрерывных электрических колебаний низкой частоты измерительной станции 1 соединен с входом фазовращателя измерительной станции 2 и входом несущей второго модулятора измерительной станции 4, при этом выход фазовращателя измерительной станции 2 соединен с входом несущей первого модулятора измерительной станции 3, на входы модуляции обоих модуляторов измерительной станции 3 и 4 подают входные данные измерительной станции, при этом выход первого модулятора измерительной станции 3 соединен с клеммами первой рамочной магнитной антенны измерительной станции 5, а выход второго модулятора измерительной станции 4 соединен с клеммами второй рамочной магнитной антенны измерительной станции 6 и со входом демодулятора измерительной станции 7, с выхода которой снимают выходные данные измерительной станции, причем выход генератора непрерывных электрических колебаний низкой частоты автономного необитаемого подводного аппарата 13 соединен с входом фазовращателя автономного необитаемого подводного аппарата 12 и входом несущей второго модулятора автономного необитаемого подводного аппарата 11, при этом выход фазовращателя автономного необитаемого подводного аппарата 12 соединен с входом несущей первого модулятора автономного необитаемого подводного аппарата 10, на входы модуляции обоих модуляторов автономного необитаемого подводного аппарата 10 и 11 подают входные данные автономного необитаемого подводного аппарата, при этом выход первого модулятора автономного необитаемого подводного аппарата 10 соединен с клеммами первой рамочной магнитной антенны автономного необитаемого подводного аппарата 8, а выход второго модулятора автономного необитаемого подводного аппарата 11 соединен с клеммами второй рамочной магнитной антенны автономного необитаемого подводного аппарата 9 и со входом демодулятора автономного необитаемого подводного аппарата 14, с выхода которой снимают выходные данные автономного необитаемого подводного аппарата.
Работает устройство, реализующее заявляемый способ двусторонней передачи данных под водой при произвольном взаимном положении в горизонтальной плоскости продольных осей измерительной станции и автономного необитаемого подводного аппарата следующим образом.
С помощью генератора непрерывных колебаний измерительной станции 1 первоначально генерируют непрерывные электрические колебания низкой частоты с известной частотой f1, начальной фазой ф01 и амплитудой U0

С помощью фазовращателя измерительной станции 2 получают сигнал вида

Значение частоты генерируемых колебаний лежит в звуковом или ультразвуковом диапазоне длин волн. Колебания, описываемые выражением (1) подают на вход второго модулятора измерительной станции 4 и далее на клеммы второй рамочной магнитной антенны измерительной станции 6. Колебания, описываемые выражением (2) подают на вход первого модулятора измерительной станции 3 и далее на клеммы первой рамочной магнитной антенны измерительной станции 5. Продольные оси рамочных магнитных антенн измерительной станции 5 и 6 располагают взаимно перпендикулярно. На входы модуляции обоих модуляторов измерительной станции 3 и 4 подают входные данные измерительной станции.
С помощью рамочных магнитных антенн 5 и 6 излучают модулированное переменное магнитное поле низкой частоты круговой поляризации. При низких частотах f1 звукового или ультразвукового длин волн и при малых дальностях, составляющих до сотни метров, изменением фазы переменного магнитного поля при его распространении на эти расстояния можно пренебречь. При этом можно утверждать, что непрерывные колебания, формируемые на выходе второй рамочной магнитной антенны автономного необитаемого подводного аппарата 9, являются синфазными, по отношению к непрерывным колебаниям, поступающим на вход второй рамочной магнитной антенны измерительной станции 6 и описываются одним и тем же выражением (1), если совпадают продольные оси второй рамочной магнитной антенны измерительной станции 6 и второй рамочной магнитной антенны автономного необитаемого подводного аппарата 9. Если совпадают продольные оси первой рамочной магнитной антенны измерительной станции 5 и второй рамочной магнитной антенны автономного необитаемого подводного аппарата 9, то можно утверждать, что непрерывные колебания, формируемые на выходе второй рамочной магнитной антенны автономного необитаемого подводного аппарата 9, являются синфазными, по отношению к непрерывным колебаниям, поступающим на вход первой рамочной магнитной антенны измерительной станции 5 и описываются одним и тем же выражением (2). При отклонении в горизонтальной плоскости продольной оси автономного необитаемого подводного аппарата, на борту которого устанавливают рамочные магнитные антенны 8 и 9 от продольной оси в этой же плоскости рамочной магнитной антенны измерительной станции 6 на угол θ непрерывные электрические колебания низкой частоты на выходе второй рамочной магнитной антенны автономного необитаемого подводного аппарата 9 описываются следующим выражением

где M(t) - некоторая функция модуляции входными данными измерительной станции с учетом ослабления сигнала при его распространении в морской воде.
На выходе демодулятора автономного необитаемого подводного аппарата 14 получают выходные данные, в точности соответствующие входным данным измерительной станции, и свободные от относительно разворота на угол θ продольной оси автономного необитаемого подводного аппарата относительно продольной оси измерительной станции. Другими словами, на выходе демодулятора 14 получают совершенно одинаковые данные при любом угле разворота θ.
Аналогичные соображения справедливы при обратной передаче данных от автономного необитаемого подводного аппарата к измерительной станции. На выходе демодулятора измерительной станции 7 получают неизменный сигнал при любом угле разворота продольной оси автономного необитаемого подводного аппарата относительно продольной оси измерительной станции.
Эффект от использования предполагаемого изобретения связан с появлением возможности двусторонней передачи данных под водой, при том, что взаимное положение продольной оси автономного необитаемого подводного аппарата и продольной оси измерительной станции не имеет значения. При любом положении в горизонтальной плоскости продольной оси автономного необитаемого подводного аппарата амплитуда сигнала на выходе рамочной магнитной антенны автономного необитаемого подводного аппарата будет одинакова, изменяется лишь начальная фаза получаемого сигнала, которая будет пропадать при выполнении операции демодуляции модулированного сигнала измерительной станции. Аналогичные рассуждения справедливы и при обратной передаче данных от автономного необитаемого подводного аппарата к измерительной станции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения дальности под водой при произвольном положении в горизонтальной плоскости продольной оси приемной рамочной магнитной антенны | 2019 |
|
RU2727267C1 |
| Способ позиционирования надводного/подводного объекта при его проходе по заданному фарватеру | 2019 |
|
RU2726388C1 |
| Способ измерения дальности на контролируемом объекте и измерительной станции | 2019 |
|
RU2697861C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 2018 |
|
RU2679000C1 |
| Способ измерения дальности под водой | 2024 |
|
RU2834180C1 |
| Способ измерения дальности | 2017 |
|
RU2657016C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| Способ измерения дальности под водой | 2024 |
|
RU2834167C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СИСТЕМА СВЯЗИ СВЕРХНИЗКОЧАСТОТНОГО И КРАЙНЕНИЗКОЧАСТОТНОГО ДИАПАЗОНА С ГЛУБОКОПОГРУЖЕННЫМИ И УДАЛЕННЫМИ ОБЪЕКТАМИ - 2 | 2014 |
|
RU2590899C2 |
Изобретение относится к гидроакустике и служит для обмена данными под водой автономного необитаемого подводного аппарата (АНПА) и измерительной станции (причального устройства) при произвольном взаимном положении в горизонтальной плоскости их продольных осей. Технический результат – обеспечение обратной связи между устройствами при их произвольном расположении в горизонтальной плоскости. Результат достигается тем, что предложен способ двусторонней передачи данных под водой при произвольном взаимном положении в горизонтальной плоскости продольных осей измерительной станции и АНПА, по которому как на измерительной станции, так и на АНПА, используются две рамочные магнитные антенны, продольные оси которых взаимно перпендикулярны, при этом антенны, как измерительной станции, так и АНПА в режиме передачи возбуждаются модулированными сигналами несущих, сдвинутыми друг относительно друга на 90°, что вызывает распространение поочередно переменного магнитного поля круговой поляризации, как от измерительной станции к АНПА, так и наоборот, причем на другой стороне модулированный сигнал принимается лишь одной антенной. 1 ил.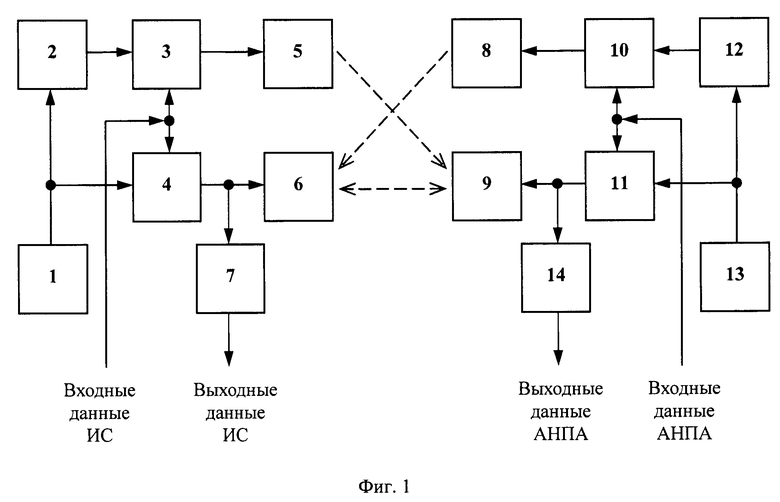
Способ двусторонней передачи данных под водой при произвольном взаимном положении в горизонтальной плоскости продольных осей измерительной станции и автономного необитаемого подводного аппарата, по которому на измерительной станции генерируют два непрерывных электрических колебания низкой частоты с одинаковыми частотами, но со сдвигом фаз между ними в 90°, каждый из которых модулируют входным информационным сигналом измерительной станции, причем непрерывные электрические колебания низкой частоты с нулевой фазой подают на клеммы второй рамочной магнитной антенны измерительной станции, а непрерывные электрические колебания низкой частоты со сдвигом по фазе на 90° относительного непрерывных электрических колебаний низкой частоты с нулевой фазой, подают на клеммы первой рамочной магнитной антенны измерительной станции, причем продольные оси первой и второй рамочных магнитных антенн измерительной станции, располагают взаимно перпендикулярно в горизонтальной плоскости, и излучают тем самым модулированное переменное магнитное поле низкой частоты круговой поляризации в горизонтальной плоскости, при этом модулированное переменное магнитное поле низкой частоты круговой поляризации в горизонтальной плоскости улавливают второй рамочной магнитной антенной автономного необитаемого подводного аппарата, причем сигнал с выхода этой рамочной магнитной антенны подают на демодулятор сигналов автономного необитаемого подводного аппарата и получают выходной информационный сигнал на автономном необитаемом подводном аппарате, после чего на измерительной станции генерирования низкочастотных сигналов прекращают, а на автономном необитаемом подводном аппарате генерируют два непрерывных электрических колебания низкой частоты с одинаковыми частотами, но со сдвигом фаз между ними в 90°, каждый из которых модулируют входным информационным сигналом автономного необитаемого подводного аппарата, причем непрерывные электрические колебания низкой частоты с нулевой фазой подают на клеммы второй рамочной магнитной антенны автономного необитаемого подводного аппарата, а непрерывные электрические колебания низкой частоты со сдвигом по фазе на 90° относительного непрерывных электрических колебаний низкой частоты с нулевой фазой, подают на клеммы первой рамочной магнитной антенны автономного необитаемого подводного аппарата, причем продольные оси первой и второй рамочных магнитных антенн автономного необитаемого подводного аппарата располагают взаимно перпендикулярно в горизонтальной плоскости, и излучают тем самым, модулированное переменное магнитное поле низкой частоты круговой поляризации в горизонтальной плоскости, при этом модулированное переменное магнитное поле низкой частоты круговой поляризации в горизонтальной плоскости улавливают второй рамочной магнитной антенной измерительной станции, причем сигнал с выхода этой рамочной магнитной антенны подают на демодулятор сигналов измерительной станции и получают выходной информационный сигнал на измерительной станции, при этом получают двустороннюю передачу данных, причем взаимное расположение в горизонтальной плоскости антенн и собственно продольных осей автономного необитаемого подводного аппарата и измерительной станции является произвольным.
| Способ измерения дальности под водой при произвольном положении в горизонтальной плоскости продольной оси приемной рамочной магнитной антенны | 2019 |
|
RU2727267C1 |
| Способ позиционирования надводного/подводного объекта при его проходе по заданному фарватеру | 2019 |
|
RU2726388C1 |
| Способ осуществления гидроакустической связи между автономными подводными аппаратами | 2019 |
|
RU2724300C1 |
| KR 100979286 B1, 31.08.2010. | |||

