Изобретение относится к области навигации, навигационных приборов, испытаниям и калибровке, и может быть использовано для калибровки датчиков бесплатформенных инерциальных систем ориентации и навигации летательных аппаратов, морских, наземных и других подвижных объектов. Интегрированный блок датчиков (ИБД) представляет собой вмонтированные в общий корпус тройку ортогонально расположенных датчиков угловых скоростей (ДУС) и тройку ортогональных датчиков линейных ускорений (ДЛУ), у которых соответствующие оси чувствительности коллинеарны. Эти блоки также называют инерциальными измерительными модулями (ИИМ).
Точность инерциальных систем навигации и ориентации в значительной степени зависит от правильности учета систематических погрешностей гироскопов, выявляемых с помощью процедуры калибровки. Применение высокоточного испытательного стенда позволяет надеяться на повышение качества калибровки микромеханических приборов среднего и низкого класса точности. При этом важным является обоснование математической модели измерений исследуемых датчиков и формирование необходимой совокупности экспериментов. В изобретении предлагается устранить вредное влияние остаточных ошибок компенсации нулей на ошибки определения неортогональности осей чувствительности датчиков за счет повышения информативности экспериментальных данных. Это особенно актуально для МЭМС ДУС.
Известен быстрый способ калибровки ИИМ [1]. В соответствии с данным способом, оператор вращает ИИМ во всех направлениях без внешнего оборудования либо с помощью оборудования. Снимаемые в это время с ИИМ данные позволяют определять 12 коэффициентов моделей погрешностей датчиков ИИМ, в том числе скорости дрейфов и масштабные коэффициенты ДУС, нулевые сигналы и масштабные коэффициенты акселерометров.
Известен также способ калибровки ДУС в составе бесплатформенных инерциальных измерительных модулей (БИИМ) [2], при этом по сигналам двухкомпонентного ДУС и трех однокомпонентных акселерометров, т.е. блока акселерометров, входящих в состав БИИМ, калибруют коэффициенты модели угловой скорости дрейфа каждого ДУС, зависящего и не зависящего от линейных перегрузок, а также углы отклонений двух его осей чувствительности и оси кинетического момента от их номинальных направлений, материализуемых установочной плоскостью и базовым направлением на корпусе ДУС.
Суть способа состоит в том, что с помощью кронштейна и поворотной установки ИИМ устанавливают в 3 различных фиксированных положениях по зенитному углу (Θ=0°; Θ=90°), при этом установку углов зенита производят по сигналам акселерометров и в каждом из них разворачивают ИИМ на азимутальные углы, близкие к значениям 0°, 90°, 180°, 270°. Во всех фиксированных положениях определяют сигналы ДУС по двум компонентам вектора измеряемой угловой скорости вращения Земли, запоминают их, а потом складывают и вычитают результаты одноименных измерений по каждому измеряемому компоненту угловой скорости и по соответствующим алгоритмам определяют коэффициенты моделей угловых скоростей дрейфа, а также углы неточной установки осей чувствительности и вектора кинетического момента ДУС. При этом сигналы блока акселерометров используются для определения угла зенита и угла установки отклонителя.
Недостатком данного способа является то, что он не обеспечивает режимы калибровки масштабных коэффициентов, не полностью обеспечивает определение углов неточной установки измерительных осей однокомпонентных ДУС на основе волоконно-оптических, волновых твердотельных и других гироскопов, трех акселерометров, а также не позволяет определять углы непараллельности соответствующих одноименных измерительных осей ДУС и акселерометров.
Наиболее близким аналогом к заявляемому способу является способ калибровки датчиков угловой скорости бесплатформенного ИИМ [3], реализованный в известном широкодиапазонном стенде (например, УПГ-48), обеспечивающем приблизительно горизонтальное задание вектора угловой скорости с фиксированным направлением в пространстве. С помощью стендового оборудования вращают ИИМ последовательно вокруг трех приблизительно ортогональных осей ИИМ. Во время вращения записывают показания ИИМ по каналу акселерометров, показания ДУС. По сигналам акселерометров определяют угловую скорость ИИМ в базисе акселерометров. Идентифицируя математическую модель ДУС, определяют нулевые сигналы ДУС, матрицу, описывающую масштабные коэффициенты, перекрестные связи, ориентацию осей чувствительности ДУС в ИИМ, матрицу, описывающую влияние линейного ускорения на показания ДУС.
Недостатком всех приведенных выше способов калибровки является необходимость предварительной компенсации смещений нулей. Это приводит к распространению ошибок компенсации смешений на ошибки идентификации углов неортогональности и масштабных коэффициентов. В силу высокой чувствительности оценок неортогональности к смещениям нулей их точность значительно падает.
Целью изобретения является повышение точности калибровки масштабных коэффициентов и углов неортогональности микромеханических ДУС за счет устранения вредного влияния остаточных ошибок компенсации нулей на ошибки определения неортогональности путем повышения информативности экспериментальных данных.
Поставленная цель достигается за счет того, что согласно заявленному способу повышения точности калибровки блока микромеханических датчиков угловой скорости, включающий начальную выставку платформы, статический эксперимент при неподвижном положении платформы, вращение с помощью стендового оборудования последовательно как минимум по двум непараллельным осям в базисе калибруемого ИБД, во время вращения записывают показания ИБД по каналу датчиков линейного ускорения (ДЛУ), показания датчиков угловой скорости (ДУС), идентифицируя математическую модель ДУС, определяют нулевые сигналы ДУС, матрицу, описывающую масштабные коэффициенты, перекрестные связи, дополнительно используют нелинейную модель микромеханических ДУС: u=K(ω)ω+С+е+F(ω),
где F(ω) - вектор нелинейных функций вида:

где: bx,by,bz - коэффициенты нелинейности функций ƒ,
K(ω)=DS(ω), ω=ωc+ωg, СT=[сх су сz],
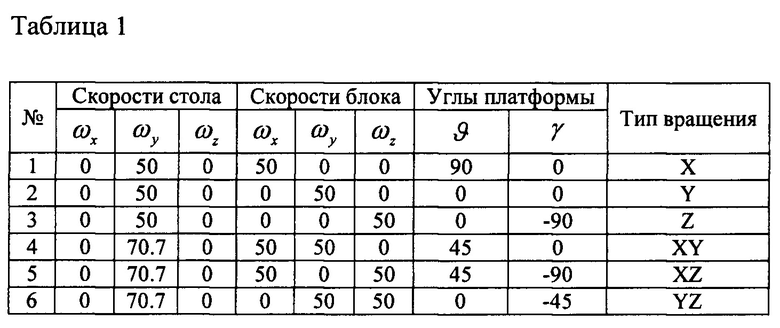
ωс - вектор проекций угловых скоростей на оси СК блока за счет вращения платформы стола; ωg - вектор проекций угловых скоростей за счет вращения Земли; С - вектор смещений нулей ДУС в единицах кода; е - шум; К - матрица калибровочных коэффициентов, учитывающая масштабы и углы неортогональности: S - диагональная матрица масштабных коэффициентов; D - матрица углов неортогональности, осуществляют разработку программы автоматизации процесса калибровки, которая включает выполнение последовательности вращений и углов наклона платформы в соответствии с 6-ю указанными в таблице 1 экспериментами при длительности интервала времени с заданными параметрами вращений и углов наклона платформы порядка 3-4 минут.
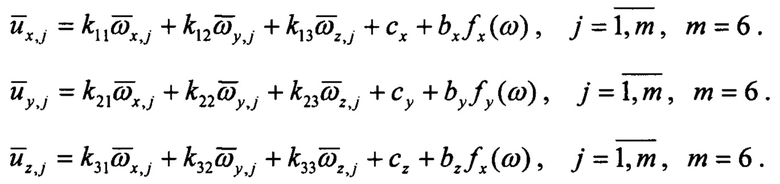
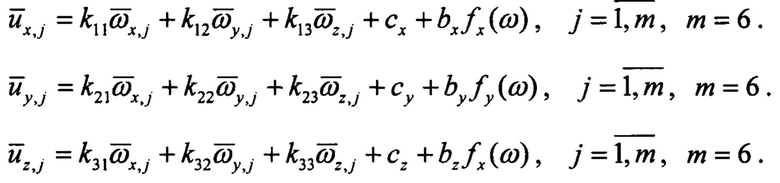
Осуществляют обработку полученных данных включающих, выбор интервала времени длительностью порядка 2-3 минут с установившейся угловой скоростью и углами наклона, вычисление средних значений кодов АЦП ДУС, дифференцирование показаний угломеров и вычисление средних значений угловых скоростей платформы стола, для определения калибровочных коэффициентов оставляют три системы уравнений, каждая система содержит шесть уравнений для измерений сигналов ДУС:
Для каждого ДУС определяют пять коэффициентов, векторы которых имеют вид:

Оценки векторов коэффициентов вычисляют по методу наименьших квадратов. Контроль калибровки по экспериментам вращений осуществляют путем оценивания средних значений угловых скоростей

Для контроля используют математические ожидания и СКО ошибок оценивания:

Математические ожидания ошибок оценивания должны быть близки к нулю, СКО ошибок оценивания должны иметь порядок СКО шумов измерений.
Суть способа определения коэффициентов калибровки излагается ниже.
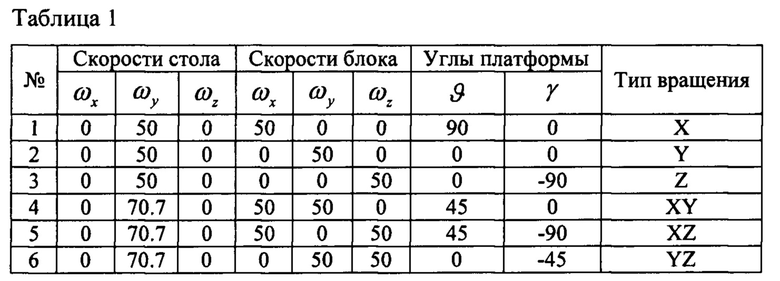
Рассматривается калибровка трех координатного блока датчиков угловой скорости при использовании данных шести вращений - три вращения раздельно по каждой из трех осей: X, Y, Z и три вращения по двум осям: XY, YZ, XZ. Вращения блока по двум осям обеспечивается путем вращения поворотной платформы стенда по внешней вертикальной оси при углах наклона по крену и тангажу. В таблице 1 представлен набор вращений и углов наклона для обеспечения равных проекций угловой скорости 50 [град/с] на оси прямоугольной системы координат (СК) блока. Здесь оси прямоугольной СК блока приняты в соответствии с его установкой на летательный аппарат: ось X - по продольной оси, ось Y - нормальная, ось Z - по правому крылу.
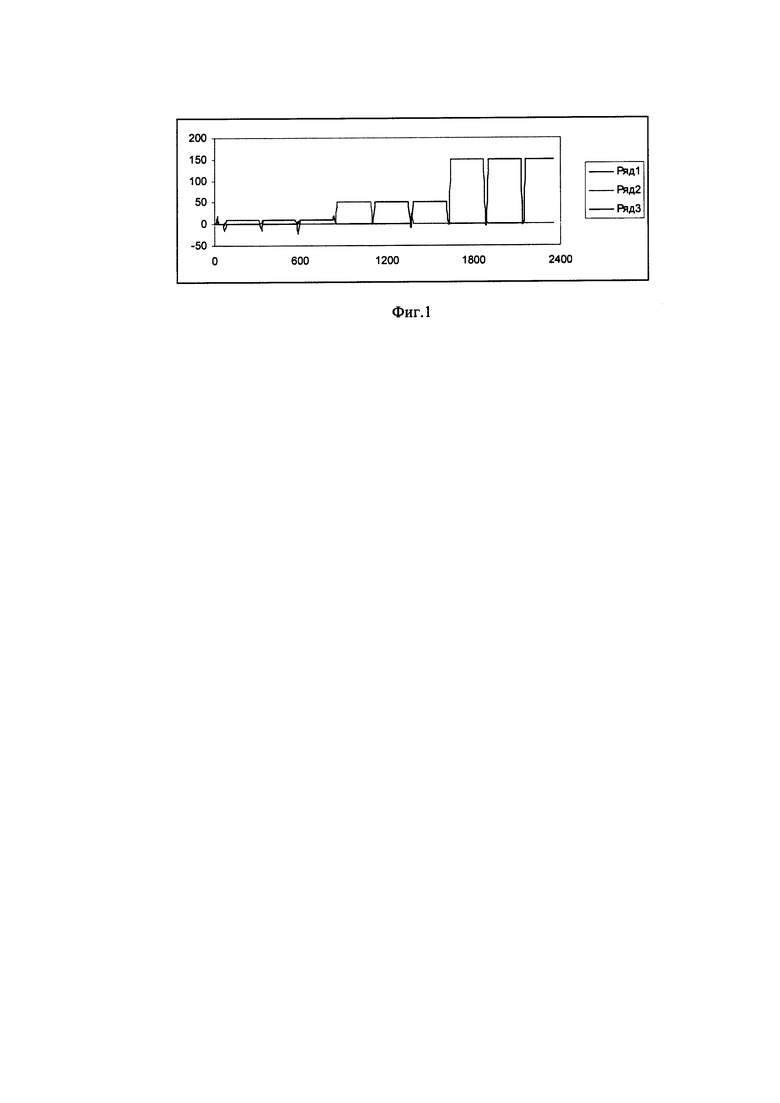
Изменение скорости вращения и углов наклона платформы задается по программе. На рис. 1 представлено программное изменение угловых скоростей блока при вращениях по двум осям для набора скоростей {10,50,150} [град/с], где Ряд 1 - по осям - XY, Ряд 2-YZ, Ряд 3-XZ.
Измерительные оси ДУС направлены по осям косоугольной СК, развернутых относительно прямоугольной СК блока на малые углы неортогональности.
Для расчета калибровочных коэффициентов используются значения действующих угловых скоростей по осям прямоугольной СК блока и коды сигналов ДУС, усредненные для интервала времени установившихся вращений.
Калибровка ДУС на трехосном столе
Модели измерений
Для связи сигналов ДУС с действующими угловыми скоростями применяется линейная модель измерений, и вспомогательная нелинейная модель. Линейная модель имеет вид [1]:
u=K(ω)ω+С+е, K(ω)=DS(ω), ω=ωс+ωg, СT=[сх су сz],

Здесь: u - вектор кодов АЦП в косоугольной СК измерительных осей ДУС; ω - вектор действующих угловых в осях прямоугольной СК блока; ωс - вектор проекций угловых скоростей на оси СК блока за счет вращения платформы стола; ωg - вектор проекций угловых скоростей за счет вращения Земли; С - вектор смещений нулей ДУС в единицах кода; е - шум; К - матрица калибровочных коэффициентов, учитывающая масштабы и углы неортогональности: S - диагональная матрица масштабных коэффициентов; D - матрица углов неортогональности.
Далее принимается  , ω=ωc, то есть угловой скоростью Земли пренебрегаем.
, ω=ωc, то есть угловой скоростью Земли пренебрегаем.
Линейная модель используется в двух вариантах - с учетом предварительной оценки вектора С смещений нулей при статическом положении блока (модель обозначается как «L3»), и без такового (модель «L4»), когда матрица К и вектор С определяются совместно по данным процессов вращений.
Нелинейная модель, обозначается как «NL5». Она предназначена для определения изменения смешений нулей ДУС в зависимости от величин угловых скоростей, действующих перпендикулярно измерительным осям:
u=K(ω)ω+С+е+F(ω),
где F(ω) - вектор нелинейных функций вида:

С учетом множества экспериментов и для самого общего случая нелинейной модели, содержащей наибольшее число коэффициентов, имеют место три системы уравнений для измерений сигналов ДУС:
Для анализа эффективности предлагаемого способа рассматриваются три варианта состава калибровочных коэффициентов, определяемых по данным вращений:
1. Линейная модель «L3» идентифицируется известным способом в два этапа [1]. На первом этапе оценивается вектор С смещений нулей при статическом положении блока. На втором этапе оценивается матрица К, при этом используются вращения раздельно по осям X, Y, Z. Векторы коэффициентов, определяемых на этапе вращений, содержат три элемента для каждого ДУС.

2. Линейная модель «L4» содержит для каждого ДУС четыре коэффициента, определяемых по результатам шести вращений - раздельно по осям X, Y, Z, и по двум осям XY, YZ, XZ. При этом определение элементов матрицы К и вектора С выполняется совместно. Векторы коэффициентов модели «L4» имеют вид:

3. Нелинейная модель «NL5», так же, как и модель «L4», идентифицируется по данным шести вращений. Эта модель содержит для каждого ДУС пять коэффициентов. Векторы коэффициентов модели «NL5» имеют вид:

Расчетные соотношения для калибровочных коэффициентов
Векторы измерений сигналов ДУС содержат средние значения кодов сигналов ДУС, их размерность равна числу вариантов вращений для одного значения угловой скорости:

Уравнения для измерений сигналов ДУС представляются в матричном виде:
Аxах=Вх, Ауау=Ву, Azaz=Bz,
где Ах,Ау,Аz - прямоугольные матрицы, размерностью (3,3) - для модели «L3», размерностью (4,6) - для модели «L4», размерностью (5,6) - для модели «NL5».
Оценки векторов коэффициентов вычисляются по методу наименьших квадратов:

Соотношения для специального программного обеспечения
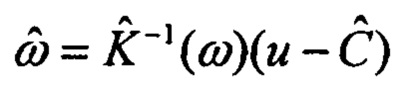
Вычисление текущих физических значений угловых скоростей по кодам ДУС и калибровочным коэффициентам выполняется по соотношениям:
 - для линейных моделей «L3», «L4».
- для линейных моделей «L3», «L4».
Для нелинейной модели «NL5» выполняется решение нелинейного уравнения  относительно
относительно
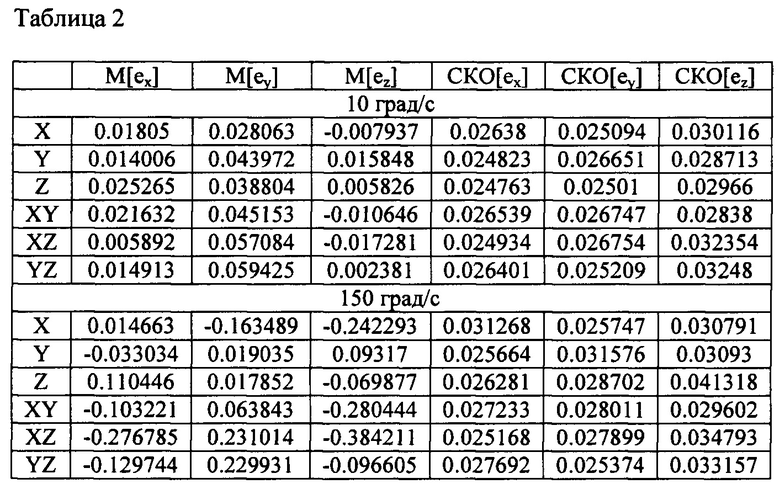
1. Оценка точности исходного блока
Вычислялись математические ожидания и среднеквадратические значения ошибок оценивания угловых скоростей на интервале времени установившихся вращений.
Из таблицы 2, где приведена статистика воспроизведения угловых скоростей исходным блоком, следует, что оценки угловых скоростей, формируемые исходным блоком имеют смещения, которые составляют сотые доли [град/с] для малых угловых скоростей, и увеличиваются до десятых долей [град/с] при увеличении угловой скорости до 150 [град/с]. При этом среднеквадратические ошибки оценивания угловых скоростей, обусловленные шумами измерений, имеют порядок 0.02…0.03 [град/с].
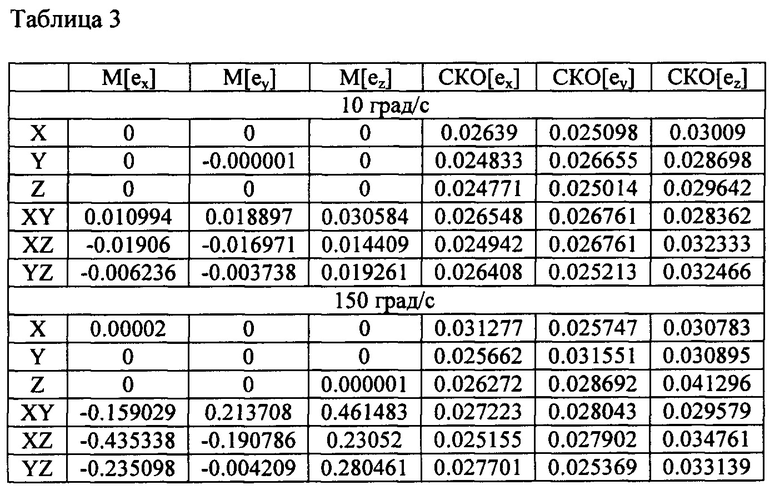
2. Оценка точности настройки линейной модели «L3»
Из таблицы 3, где приведена статистики ошибок воспроизведения угловых скоростей моделью L3, следует, что практически нулевые смещения оценок угловых скоростей на вращениях раздельно по осям X, Y, Z, возрастают на вращениях по двум осям: XY, YZ, XZ. Это означает, что вектор С, определенный в статическом положении блока и матрица К, определенная по данным раздельных вращений по осям X, Y, Z, неправомерны для сложных вращений по двум осям XY, YZ, XZ, что особенно заметно на больших угловых скоростях.
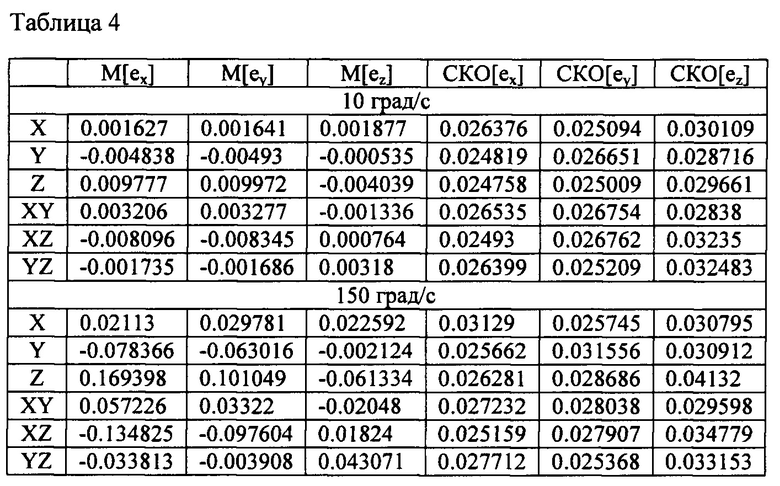
3. Оценка точности настройки линейной модели «L4»
Из таблицы 4, где приведена статистики ошибок воспроизведения угловых скоростей моделью L4, следует, что при совместном оценивании матрицы К и вектора С по модели «L4» ошибки оценивания угловых скоростей меньше ошибок исходного блока и ошибок модели «L3», особенно на малых угловых скоростях. Анализ числовых значений коэффициентов показывает, что они претерпевают значительные изменения при варьировании угловой скорости.
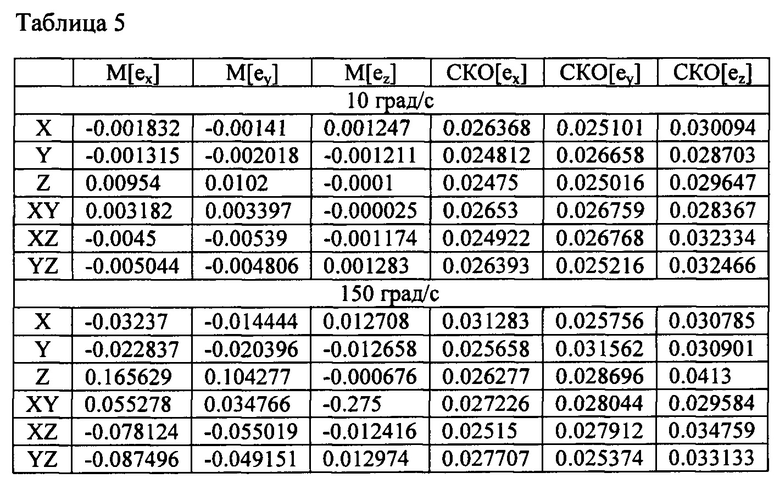
4. Оценка точности настройки нелинейной модели «NL5»
Из сравнения таблицы 5, где приведена статистики ошибок воспроизведения угловых скоростей моделью NL5, с таблицей 4 следует, что точность нелинейной модели «NL5» выше точности линейной модели «L4». При этом наблюдается хорошая стабильность коэффициентов нелинейной модели при варьировании угловой скорости, в том числе коэффициентов bx,by,bz.
Контроль оценок
Далее определяют ошибки оценивания средних значений угловых скоростей:
Здесь j - номер эксперимента.
Для контроля используют математические ожидания и СКО ошибок оценивания:
Математические ожидания ошибок оценивания должны быть близки к нулю. СКО ошибок оценивания должны иметь порядок СКО шумов измерений.
Программа управления столом предусматривает:
- начальную выставку платформы - для ДУС «чувствующих» угловую скорость Земли;
- выполнение последовательности вращений и углов наклона платформы в соответствии с 6-ю указанными экспериментами при длительности интервала времени порядка 3-4 минут;
- регистрацию времени, кодов АЦП, показаний трех угломеров платформы, датчиков температуры блока и датчика температуры платформы;
- повторение этих действий для сетки значений угловой скорости;
- статический эксперимент при неподвижном положении платформы в течение порядка 10 минут.
Для полного диапазона температур эксперименты повторяются на сетке температур
Расчетная часть
Для одного установившегося значения температуры расчетная часть включает:
- выбор интервала времени длительностью порядка 2-3 минут с установившейся угловой скоростью и углами наклона;
- вычисление средних значений кодов АЦП ДУС;
- дифференцирование показаний угломеров и вычисление средних значений угловых скоростей платформы стола;
- вычисление средних значений показаний датчиков температуры;
- вычисление калибровочных коэффициентов;
- контроль калибровки по экспериментам вращений;
- контроль калибровки по статическому эксперименту;
- расчет интерполяционных таблиц по угловой скорости.
Для полного диапазона температур выполняются следующие расчеты:
- калибровка датчиков температуры блока;
- формирование интерполяционных таблиц по температуре;
- контроль калибровки с учетом интерполяции по скорости и температуре.
Технический результат
По предлагаемому способу оценивание масштабов и углов неортогональности выполняется совместно со смещениями нулей. За счет этого обеспечивается инвариантность оценок масштабов и углов неортогональности по отношению к смещениям нулей ДУС, и, соответственно, повышение точности, что ценно для микромеханических ДУС с высоким уровнем нестабильности смещений нулей.
Точность нелинейной модели «NL5» выше точности линейной модели «L4». При этом наблюдается хорошая стабильность коэффициентов нелинейной модели при варьировании угловой скорости, в том числе коэффициентов bx,by,bz.
Данный способ обеспечивает оценивание масштабных коэффициентов для фиксированных значений угловых скоростей. Это позволяет использовать его для получения множества оценок для набора значений угловых скоростей и направлений вращения для формирования интерполяционных таблиц с целью учета нелинейных зависимостей масштабов от скорости и направления вращения.
Предложены скорости вращения, углы поворота платформы стола и необходимый набор экспериментов для точного расчета коэффициентов калибровки и обеспечения постоянства и равенства проекций задаваемых угловых скоростей на оси блока.
Литература
1. Пат. US 2014372063 (A1) US, МПК7 G01P 21/00. Quick calibration method for inertial measurement unit / NIU XIAOJI [CN] и др.; заявитель UNIV WUHAN [CN] - № US 201314239145; заявл. 05.03.2013; опубл. 18.12.2014.
2. РФ №2269813 Способ калибровки параметров бесплатформенного инерциального измерительного модуля, /Синеев А.И. и др. Патентообладатель: ЗАО Газприборавтоматикасервис", опубл. 10.02.2006.
3. Волынский Д.В., Драницына Е.В., Одинцов А.А., Унтилов А.А. Калибровка волоконно-оптических гироскопов в составе бескарданных инерциальных измерительных модулей. Гироскопия и навигация №2, 2012, с. 56-68.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ повышения точности калибровки масштабных коэффициентов и углов неортогональности осей чувствительности блока датчиков ДУС | 2019 |
|
RU2718142C1 |
| Способ определения коэффициентов калибровки интегрированного блока датчиков | 2017 |
|
RU2655053C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2015 |
|
RU2602736C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| Способ калибровки прецизионных датчиков угловой скорости с учетом годичной угловой орбитальной скорости вращения Земли | 2023 |
|
RU2810893C1 |
| СПОСОБ ОЦЕНКИ ОШИБОК И КОНТРОЛЯ ДАТЧИКОВ ПЕРВИЧНОЙ ИНФОРМАЦИИ В СОСТАВЕ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В НАЗЕМНЫХ УСЛОВИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2537513C2 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2010 |
|
RU2447404C2 |
| СПОСОБ КАЛИБРОВКИ ГИРОИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИОННОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2092402C1 |
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
Изобретение относится к области навигации, навигационных приборов, испытаниям и калибровке и может быть использовано для калибровки датчиков бесплатформенных инерциальных систем ориентации и навигации летательных аппаратов, морских, наземных и других подвижных объектов. Способ включает начальную выставку платформы, статический эксперимент, при неподвижном положении платформы, последовательное вращение с помощью стендового оборудования как минимум по двум непараллельным осям в базисе калибруемого ИБД, запись показания ИБД по каналу датчиков линейного ускорения (ДЛУ) и показания датчиков угловой скорости (ДУС). Идентифицируя предложенную нелинейную математическую модель ДУС, определяют нулевые сигналы ДУС, матрицу, описывающую масштабные коэффициенты, перекрестные связи, нелинейные коэффициенты, для чего разрабатывают программу автоматизации процесса калибровки. Программа включает выполнение последовательности вращений и углов наклона платформы в соответствии с 6-ю указанными экспериментами при длительности интервала времени вращений и наклонов платформы порядка 3-4 минут. Обработка полученных данных включает выбор интервала времени длительностью порядка 2-3 минут с установившейся угловой скоростью и углами наклона, вычисление средних значений кодов АЦП ДУС, дифференцирование показаний угломеров и вычисление средних значений угловых скоростей платформы стола, вычисление средних значений показаний датчиков температуры. Далее, используя определенные алгоритмы, определяют калибровочные коэффициенты. По предлагаемому способу оценивание масштабов и углов неортогональности выполняется совместно со смещениями нулей. За счет этого обеспечивается инвариантность оценок масштабных коэффициентов и углов неортогональности по отношению к смещениям нулей ДУС и, соответственно, повышение точности, что важно для микромеханических ДУС с высоким уровнем нестабильности смещений нулей. Технический результат – повышение точности калибровки масштабных коэффициентов и углов неортогональности микромеханических ДУС. 5 табл., 1 ил.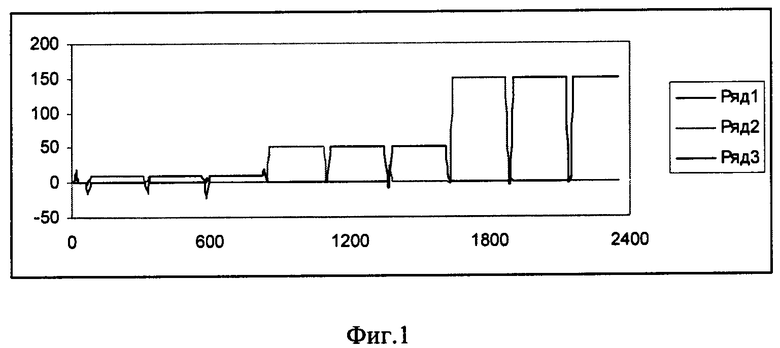
Способ повышения точности калибровки блока микромеханических датчиков угловой скорости, включающий начальную выставку платформы, статический эксперимент при неподвижном положении платформы, вращение с помощью стендового оборудования последовательно как минимум по двум непараллельным осям в базисе калибруемого ИБД, во время вращения записывают показания ИБД по каналу датчиков линейного ускорения (ДЛУ), показания датчиков угловой скорости (ДУС), идентифицируя математическую модель ДУС, определяют нулевые сигналы ДУС, матрицу, описывающую масштабные коэффициенты, перекрестные связи, отличающийся тем, что дополнительно используют нелинейную модель микромеханических ДУС
u=K(ω)ω+С+е+F(ω),
где F(ω) - вектор нелинейных функций вида

осуществляют разработку программы автоматизации процесса калибровки, которая включает выполнение последовательности вращений и углов наклона платформы в соответствии с 6-ю указанными ниже в таблице 1 экспериментами при длительности интервала времени порядка 3-4 минут,
обработку полученных данных включающих, выбор интервала времени длительностью порядка 2-3 минут с установившейся угловой скоростью и углами наклона, вычисление средних значений кодов АЦП ДУС, дифференцирование показаний угломеров и вычисление средних значений угловых скоростей платформы стола, составляют три системы уравнений для определения калибровочных коэффициентов, каждая система содержит шесть уравнений измерений сигналов ДУС:
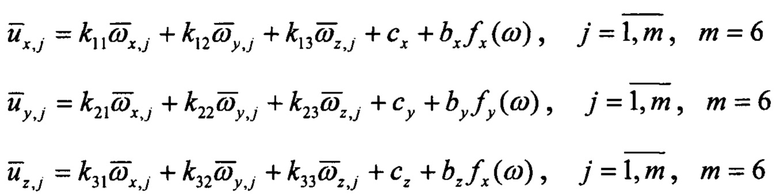
и для каждого ДУС определяют пять коэффициентов, векторы которых имеют вид:

оценки векторов коэффициентов вычисляют по методу наименьших квадратов, контроль калибровки по экспериментам вращений осуществляют путем оценивания средних значений угловых скоростей

для контроля используют математические ожидания и СКО ошибок оценивания:

математические ожидания ошибок оценивания должны быть близки к нулю, СКО ошибок оценивания должны иметь порядок СКО шумов измерений.
| Способ определения коэффициентов калибровки интегрированного блока датчиков | 2017 |
|
RU2655053C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2015 |
|
RU2602736C1 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2010 |
|
RU2447404C2 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| US 9810549 B2, 07.11.2017. | |||

