Изобретение относится к измерительной технике и может быть использовано для морских, воздушных и наземных объектов. Задачей изобретения является повышение точности бесплатформенной инерциальной навигационной системы (БИНС) и уменьшение требуемых вычислительных затрат путем создания способа непрерывной коррекции углов ориентации от одноантенной спутниковой навигационной системы (СНС) за счет оценивания и коррекции смещений нулей датчиков угловых скоростей и линейных ускорений.
Предлагается способ совместного оценивания крена, тангажа и рыскания ЛА по измерениям трехкомпонентных датчиков ДУС, ДЛУ и одного приемника СНС по алгоритму нелинейного субоптимального фильтра первого порядка приближения калмановского типа, имеющего третий порядок вектора состояния. При маршрутных полетах по прямой линии в канале оценивания курса может возникать погрешность из-за ухудшения наблюдаемости. Обеспечивается повышение точности ориентации самолета, в том числе в канале курса, за счет оценивания и коррекции смещений нулей датчиков угловых скоростей и линейных ускорений.
В распространенном способе комплексирования при помощи статистического фильтра оцениваются погрешности навигационных параметров и инструментальных погрешностей инерциальных датчиков. По результатам оценок по уравнениям динамики косвенным образом оценивают ошибки текущих измерений углов пространственной ориентации ЛА и корректируют текущие углы ориентации. Для обеспечения заданной точности при этом необходимо оценивать свыше двадцати параметров, что требует больших вычислительных мощностей. Определение углов пространственной ориентации спутниковыми навигационными системами путем измерения фазового сдвига между принятыми сигналами от каждого космического аппарата требует установки на ЛА нескольких антенн и линий приема и обработки сигналов, что на малогабаритных ЛА не всегда возможно.
Известен способ угловой ориентации объекта по сигналам спутниковых радионавигационных систем. Патент №2379700, Российская Федерация. Способ угловой ориентации объекта по сигналам спутниковых радионавигационных систем. МПК G01S 5/02. Опубликовано 20.01.2010, бюл. №2.
Патент основан на приеме сигналов от космических аппаратов глобальных навигационных спутниковых систем на разнесенные две или более антенны, измерении фазового сдвига между принятыми сигналами от каждого космического аппарата, проведении в течение интервала времени m измерений фазовых сдвигов между парами антенно-приемных устройств, в котором осуществляют подбор значений целочисленных неоднозначностей измерений фазовых сдвигов для минимального созвездия из n космических аппаратов, позволяющих определить возможные значения угловой ориентации.
Недостатком этого изобретения является то, что для его реализации, кроме того, что необходимо иметь несколько антенн и линий приема и обработки сигналов, требуется предварительная коррекция измеренных фазовых сдвигов на величину аппаратурной составляющей систематической погрешности, вызванной неодинаковыми значениями группового времени запаздывания (ГВЗ) сигналов в антенно-приемных устройствах (далее антенно-приемные каналы), являющихся составной частью устройства определения угловой ориентации, размещаемого на объекте. При неодинаковых значениях ГВЗ в антенно-приемных каналах, разность значений ГВЗ в них будет отличаться от нуля. Если в расчетах принять указанную разность значений ГВЗ равной нулю, то это приведет к снижению точности оценки угловой ориентации объекта. Кроме того на малоразмерных ЛА размещение нескольких приемных антенн проблематично.
Существует Патент России №2256154. Способ измерения угловых положений летательного аппарата. Опубликовано 10.07.05, бюл. №19.
Задача ставится как оценивание  где
где  - углы тангажа крена и рыскания. Вектором измерений является Vs, а его оценка-прогноз зависит от
- углы тангажа крена и рыскания. Вектором измерений является Vs, а его оценка-прогноз зависит от  т.е.
т.е.  Оценивание углов ориентации выполняется методом наименьших квадратов по множеству измерений при интегрировании уравнений на скользящем интервале наблюдений порядка десятков секунд. За счет этого уменьшается влияние погрешностей низкочастотных измерений спутниковых скоростей. Точность повышается при увеличении длины скользящего интервала. Недостатком является большой объем вычислений, выполняемых на каждом малом шаге Δt.
Оценивание углов ориентации выполняется методом наименьших квадратов по множеству измерений при интегрировании уравнений на скользящем интервале наблюдений порядка десятков секунд. За счет этого уменьшается влияние погрешностей низкочастотных измерений спутниковых скоростей. Точность повышается при увеличении длины скользящего интервала. Недостатком является большой объем вычислений, выполняемых на каждом малом шаге Δt.
Существует патент на изобретение №2646954. Способ коррекции бесплатформенной инерциальной навигационной системы. МПК G01C 21/06. Опубл. 12.03.2018, бюл. №8, принятый нами за прототип.
Способ включает в себя комплексирование сигналов, соответствующих угловой скорости и земной скорости объекта, с сигналами, соответствующими линейным ускорениям, и преобразованным с учетом параметров полета объекта, и адаптивную оценку крена и тангажа посредством фильтра Калмана, в котором коэффициент усиления изменяется в зависимости от текущих значений модулей перегрузки, линейной скорости, а также угловых скоростей. Используют сигнал, соответствующий истинной воздушной скорости объекта, полученный от системы воздушных сигналов (СВС) в виде функции от динамического давления, и сигнал, соответствующий продольному ускорению, полученный путем дифференцирования с последующим сглаживанием сигнала скорости от СВС.
Недостатком известного способа является то, что в приведенном изобретении не предусмотрено измерение курса. Кроме того в условиях непрерывного маневрирования ЛА этот способ обладает недостаточной точностью. Это может привести к возникновению значительных погрешностей в результате постоянного маневрирования высокоманевренных ЛА.
Цель работы - повышение точности коррекции БИНС по углам крена, тангажа и обеспечение коррекции курса по сигналам одноантенного приемника СНС во всем диапазоне условий полета, при уменьшении вычислительных затрат БЦВМ.
Поставленная цель достигается за счет того, что согласно способу коррекции углов ориентации ЛА по сигналам от одноантенной СНС, при котором, по сигналам, поступающим от датчиков угловых скоростей (ДУС) и от датчиков линейных ускорений (ДЛУ), определяют углы крена и тангажа летательного аппарата (ЛА), совместно обрабатывают сигналы, соответствующие линейным ускорениям, с сигналами, соответствующими линейным ускорениям, полученными путем преобразования параметров полета ЛА, используя при этом сигналы земной скорости от СНС, оценивают углы крена и тангажа посредством фильтра Кал-мана и осуществляют коррекцию углов крена и тангажа БИНС, дополнительно используют: нелинейный субоптимальный фильтр первого порядка приближения калмановского типа, имеющего третий порядок вектора состояния, сигналы, соответствующие линейным скоростям, полученные от одноантенного приемника СНС и их проекции в связанную систему координат, используют сигналы, соответствующие линейным ускорениям ЛА, которые получают путем сглаживания и дифференцирования сигналов скоростей от приемника СНС с последующим проецированием их в связанную систему координат, в уравнении измерений следят за изменениями перегрузок, полученных от датчиков ДЛУ и перегрузок, вычисленных по сигналам от СНС и текущим параметрам полета ЛА, определяют условия наблюдаемости фильтра и выделяют участки полета с хорошей наблюдаемостью, на участках наблюдаемости оценивают смещение нулевых сигналов ДУС и ДЛУ, корректируют показания датчиков и уточняют текущий угол курса (рыскания).
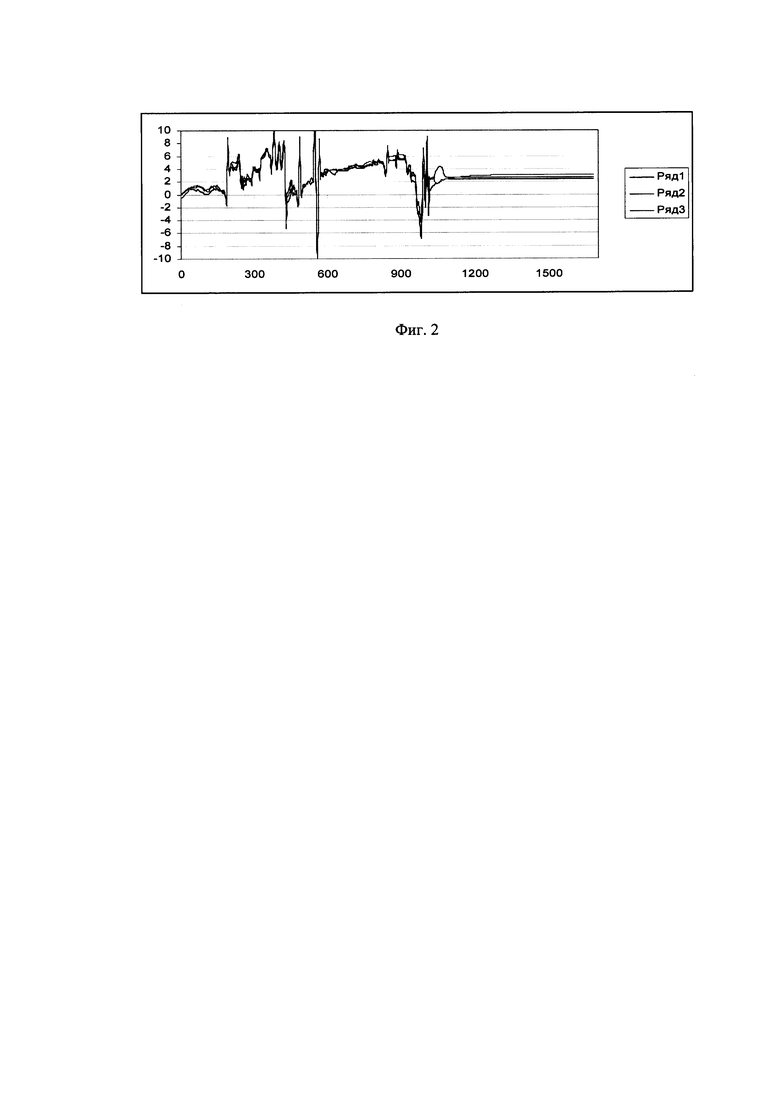
В иллюстрациях представлены результаты исследования способа методом математического моделирования на ЭВМ. На фиг. 1 представлены графики моделирования: 1 - рыскание; 2 - оценка без коррекции смещений нулей датчиков; 3 - оценка при коррекции. Фиг. 2, графики: 1 - тангаж; 2 - оценка без коррекции нулей датчиков; 3 - оценка при коррекции. Фиг. 3, графики: 1 - крен; 2 - оценка без коррекции нулей датчиков; 3 - оценка при коррекции. На фиг. 4 представлено изменение угла сноса, как рассогласования между рысканием и углом пути. На фиг. 5 представлены результаты оптимизации области угловых скоростей Ω: зависимости среднего модуля ошибки ориентации от верхнего ограничения  угловых скоростей
угловых скоростей  для набора значений нижнего ограничения
для набора значений нижнего ограничения  угловых скоростей
угловых скоростей  На фиг. 6 представлены результаты оптимизации области N ограничения оценок производных
На фиг. 6 представлены результаты оптимизации области N ограничения оценок производных  зависимости среднего модуля ошибки от
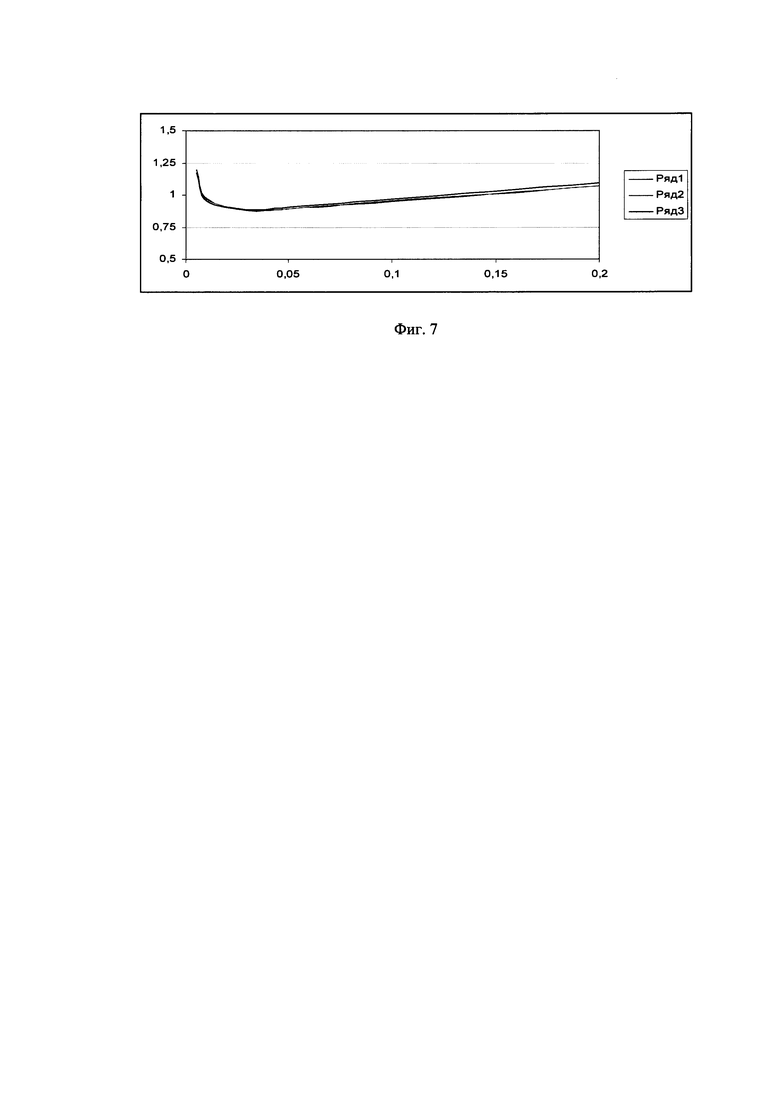
зависимости среднего модуля ошибки от  На фиг. 7 и 8 представлены результаты оптимизации Qi: зависимости среднего модуля ошибки ориентации от
На фиг. 7 и 8 представлены результаты оптимизации Qi: зависимости среднего модуля ошибки ориентации от  для набора значений
для набора значений  и оптимизация Ri, а также зависимости среднего модуля ошибки ориентации от rmin для набора значений
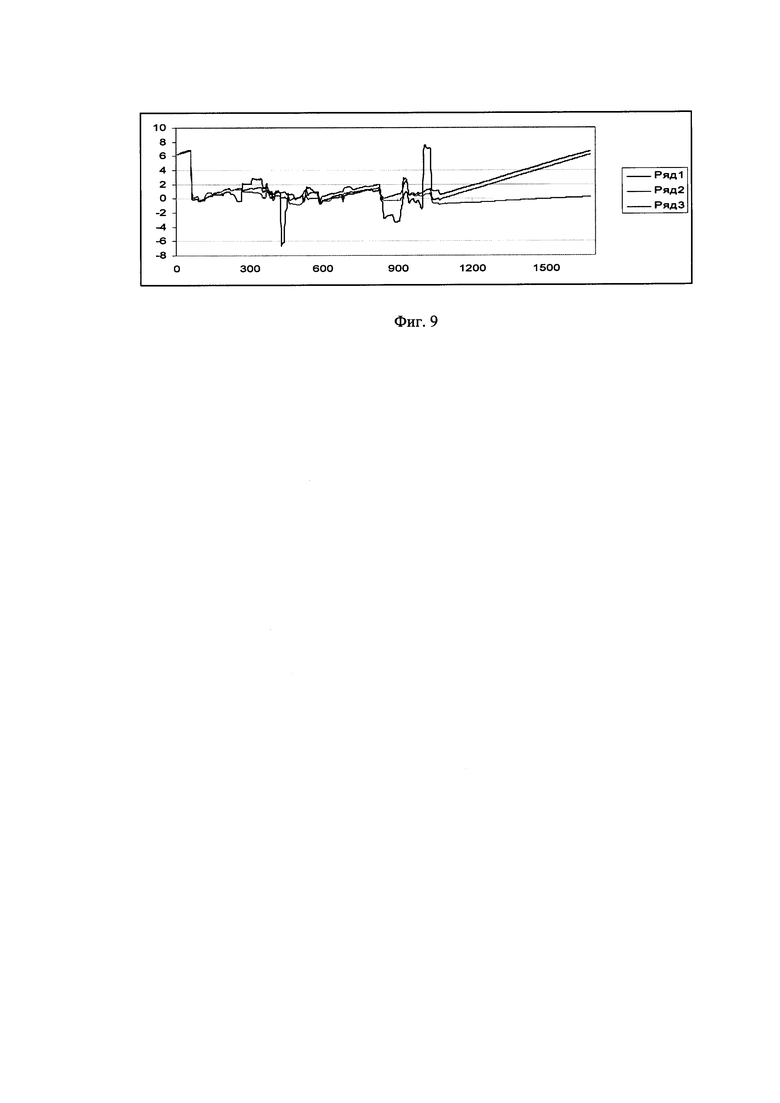
и оптимизация Ri, а также зависимости среднего модуля ошибки ориентации от rmin для набора значений  На фиг. 9 приведены погрешности оценивания рыскания: 1 - при постоянных матрицах Q, R и без коррекции нулей датчиков; 2 - при переменных матрицах Qi, Ri и без коррекции нулей датчиков; 3 - при переменных матрицах Qi, Ri и с коррекцией нулей датчиков. На фиг. 10 - погрешности оценивания тангажа: 1 - при постоянных матрицах Q, R и без коррекции нулей датчиков; 2 - при переменных матрицах Qi, Ri и без коррекции нулей датчиков; 3 - при переменных матрицах Qi, Ri и с коррекцией нулей датчиков. На фиг. 11 показаны погрешности оценивания крена: 1 - при постоянных матрицах Q, R и без коррекции нулей датчиков; 2 - при переменных матрицах Qi, Ri и без коррекции нулей датчиков; 3 - при переменных матрицах Qi, Ri и с коррекцией нулей датчиков.
На фиг. 9 приведены погрешности оценивания рыскания: 1 - при постоянных матрицах Q, R и без коррекции нулей датчиков; 2 - при переменных матрицах Qi, Ri и без коррекции нулей датчиков; 3 - при переменных матрицах Qi, Ri и с коррекцией нулей датчиков. На фиг. 10 - погрешности оценивания тангажа: 1 - при постоянных матрицах Q, R и без коррекции нулей датчиков; 2 - при переменных матрицах Qi, Ri и без коррекции нулей датчиков; 3 - при переменных матрицах Qi, Ri и с коррекцией нулей датчиков. На фиг. 11 показаны погрешности оценивания крена: 1 - при постоянных матрицах Q, R и без коррекции нулей датчиков; 2 - при переменных матрицах Qi, Ri и без коррекции нулей датчиков; 3 - при переменных матрицах Qi, Ri и с коррекцией нулей датчиков.
Ниже приведено описание изобретения.
Комплексирование измерений датчиков угловых скоростей (ДУС) и датчиков линейных ускорений (ДЛУ) с данными, поступающими от приемника спутниковой навигационной системы (СНС), представляет практический интерес, так как позволяет использовать в бесплатформенных инерциальных системах (БИНС) летательных аппаратов (ЛА) датчики среднего и нижнего уровня точности.
Оцениваемый вектор состояния включает в себя углы ориентации ЛА

где  - углы тангажа крена и рыскания.
- углы тангажа крена и рыскания.
В качестве источников информации выбраны: трехкомпонентный ДУС, трехкомпонентный ДЛУ и одноантенный спутниковый приемник. Используют три группы измерений:

где n - вектор измерений линейных ускорений в единицах ускорения свободного падения g; ω - вектор измерений угловых скоростей; Vs - вектор скорости в плановой системе координат;  - проекции скорости ЛА на север, по местной вертикали и на восток, которые поступают от приемника СНС (спутниковые скорости).
- проекции скорости ЛА на север, по местной вертикали и на восток, которые поступают от приемника СНС (спутниковые скорости).
Связь между вектором состояния (1) и измерениями (2) описывают дифференциальными уравнениями динамики полета [1]

где:  - вектор скорости ЛА в инерциальном пространстве и его проекции на оси связанной системы координат - «связанные скорости».
- вектор скорости ЛА в инерциальном пространстве и его проекции на оси связанной системы координат - «связанные скорости».
Проекции вектора Vs в связанную систему координат определяют выражением:

элементы матрицы  имеют вид:
имеют вид:

Оценивание вектора (1) по измерениям (2) затруднено тем, что наблюдаемость ориентации зависит от траектории полета. На участках прямолинейного полета при V=const, ω=0 задача вырождается и наблюдаются только два угла наклона - тангаж  и крен
и крен  а угол рыскания ψ оценивается плохо. При этом угол пути, который вычисляется по спутниковым скоростям, как
а угол рыскания ψ оценивается плохо. При этом угол пути, который вычисляется по спутниковым скоростям, как  и отличается от рыскания на угол сноса, который не определен, и в этом смысле измерения СНС неинформативны.
и отличается от рыскания на угол сноса, который не определен, и в этом смысле измерения СНС неинформативны.
Для ЛА самолетного типа участки прямолинейного горизонтального полета составляют значительную часть траектории. В этих условиях наблюдаемость вектора ориентации (1) по измерениям (2) является переменной. Она улучшается при вращении ЛА за счет связи между линейными и угловыми движениями, описываемой уравнениями (3), и ухудшается, когда вращения нет.
Другой трудностью является относительно низкая частота измерений проекций скорости  поступающих от приемника СНС, которая на один-два порядка ниже частоты регистрации измерений ДУС и ДЛУ. Это означает, что шаг дискретизации по времени спутниковых скоростей Δts значительно больше шага Δt дискретизации измерений инерциальных датчиков:
поступающих от приемника СНС, которая на один-два порядка ниже частоты регистрации измерений ДУС и ДЛУ. Это означает, что шаг дискретизации по времени спутниковых скоростей Δts значительно больше шага Δt дискретизации измерений инерциальных датчиков:  То есть процессы изменения
То есть процессы изменения  относительно процессов изменения
относительно процессов изменения  являются кусочно-постоянными и определение их производных по времени на малых шагах Δt представляет значительные трудности.
являются кусочно-постоянными и определение их производных по времени на малых шагах Δt представляет значительные трудности.
В предлагаемом способе задача определения вектора (1) решают рекуррентным способом по измерениям (2), где вектором измерений является вектор линейных ускорений n, а его оценка зависит от 

Здесь ƒ2 - процедуры вычисления оценки  вектора измерений z, которые определяются соотношениями (3), (5).
вектора измерений z, которые определяются соотношениями (3), (5).
Типовая траектория полета самолета при полете по некоторому заданному маршруту предусматривает его вращение лишь на отдельных участках. Значительную часть времени самолет не вращается и летит прямолинейно и горизонтально. На таких участках ошибки ориентации нарастают за счет влияния остаточных смещений нулей датчиков, не скомпенсированных при калибровке, либо измененных за счет неучтенных факторов. При этом особенно быстро возрастает погрешность оценки рыскания.
В предлагаемом способе выделяют участки полета с хорошей наблюдаемостью, назовем их «участки наблюдаемости» - с помощью анализа «условий наблюдаемости углов ориентации», при выполнении которых углы ориентации оцениваются с приемлемой точностью. Также предлагается на участках наблюдаемости оценивать смещения нулей ДУС и ДЛУ, что позволяет корректировать их показания и повысить точность ориентации в течение всего полета.
Вводится понятие «время наблюдаемости углов ориентации». Текущее время наблюдаемости ориентации определяют как сумму предшествующих отрезков времени, в течение которых выполнялись условия наблюдаемости. Время наблюдаемости используют для повышения точности оценок смещений нулей путем их усреднения.
Условия наблюдаемости ориентации формируют по результатам моделирования алгоритма оценивания ориентации на типовых процессах полета ЛА интересующего типа, получаемых с помощью авиасимулятора.
Математические модели
Дискретную модель объекта принимают в виде:

где  - нормальное распределение вектора состояния в начальный момент времени.
- нормальное распределение вектора состояния в начальный момент времени.
Прогноз ориентации на шаг Δt выполняют с помощью кватерниона ориентации.

В (7) и (8) i - номер дискретного момента времени ti изменяемого с шагом Δt=1/ƒ, где ƒ - частота регистрации измерений инерциальных датчиков; xi - текущий вектор состояния, элементы которого являются углами тангажа  , крена γi и рыскания ψi; wi - вектор возмущений, элементы которого принимаются дискретными белыми шумами с ковариационной матрицей Qi; xqi - кватернион ориентации;
, крена γi и рыскания ψi; wi - вектор возмущений, элементы которого принимаются дискретными белыми шумами с ковариационной матрицей Qi; xqi - кватернион ориентации;  - процедура перечета кватерниона в углы ориентации, Iq - процедура прогноза кватерниона ориентации на следующий дискретный момент времени;
- процедура перечета кватерниона в углы ориентации, Iq - процедура прогноза кватерниона ориентации на следующий дискретный момент времени;  - вектор оценок угловых скоростей;
- вектор оценок угловых скоростей;  - оценки смещений нулей датчиков угловых скоростей;
- оценки смещений нулей датчиков угловых скоростей;  - измерения угловых скоростей датчиками ДУС.
- измерения угловых скоростей датчиками ДУС.
Дискретную модель измерений принимают в виде:

где z - вектор измерений; ni - вектор линейных ускорений ЛА  νi - вектор шумов измерений, элементы которого принимают дискретными белыми шумами с ковариационной матрицей Ri;
νi - вектор шумов измерений, элементы которого принимают дискретными белыми шумами с ковариационной матрицей Ri;  - оценки смещений нулей датчиков линейных ускорений.
- оценки смещений нулей датчиков линейных ускорений.
Соотношения для линейных ускорений  следуют из (3):
следуют из (3):

В (10) присутствуют производные  скоростей в связанной системе координат. При изменении проекций скорости полета они вносят существенный вклад в линейные ускорения
скоростей в связанной системе координат. При изменении проекций скорости полета они вносят существенный вклад в линейные ускорения  Учет
Учет  требует дифференцирования спутниковых скоростей, что проблематично из-за низкой частоты их измерений. Поэтому вместо (10) используют упрощенные соотношения для оценок линейных скоростей, правомерные на участках полета с пренебрежимо малым влиянием производных
требует дифференцирования спутниковых скоростей, что проблематично из-за низкой частоты их измерений. Поэтому вместо (10) используют упрощенные соотношения для оценок линейных скоростей, правомерные на участках полета с пренебрежимо малым влиянием производных  на участках наблюдаемости:
на участках наблюдаемости:

Здесь  - оценка вектора измерений;
- оценка вектора измерений;  - вектор оценок линейных ускорений ЛА;
- вектор оценок линейных ускорений ЛА;  - измерения линейных ускорений датчиками ДЛУ на участках наблюдаемости;
- измерения линейных ускорений датчиками ДЛУ на участках наблюдаемости;  - оценки углов ориентации;
- оценки углов ориентации;  - оценки связанных скоростей;
- оценки связанных скоростей;  - оценка матрицы поворота, элементы которой вычисляются с учетом текущих оценок углов ориентации
- оценка матрицы поворота, элементы которой вычисляются с учетом текущих оценок углов ориентации 
Соотношениям (11) соответствует матрица Якоби;

Аналитические соотношения для частных производных в матрице Якоби получают дифференцированием  в (11) с учетом выражений для элементов матрицы поворота (4), которые являются функциями измерений спутниковых скоростей
в (11) с учетом выражений для элементов матрицы поворота (4), которые являются функциями измерений спутниковых скоростей 
Условия наблюдаемости
Назначение условий наблюдаемости состоит в том, что бы изменять интенсивность возмущений и шумов измерений в зависимости от их выполнения.
Диагональными элементами матриц Qi, Ri в моделях (7) и (9) являются дисперсии возмущений и шумов измерений, которые уменьшают при выполнении условий наблюдаемости, и увеличивают при их не выполнении.
Условия наблюдаемости учитывают требования к видам вращения ЛА, определяемым угловыми скоростями, а также к достаточно точному выдерживанию упрошенных соотношений (11) для 
На участках наблюдаемости угловые скорости и производные связанных скоростей удовлетворяют некоторым областям Ω и N, в которых обеспечивается приемлемая точность оценивания ориентации. При этом используют оценки угловых скоростей и производных связанных скоростей.

Здесь pn - признак наблюдаемости, фиксирующий выполнение условий (13).
Оценки угловых скоростей  определяют в соответствии с (8). Оценки производных связанных скоростей
определяют в соответствии с (8). Оценки производных связанных скоростей  определяют соотношениями:
определяют соотношениями:

где  вычисляют с помощью оценки матрицы поворота и измерений спутниковых скоростей в соответствии с (11).
вычисляют с помощью оценки матрицы поворота и измерений спутниковых скоростей в соответствии с (11).
Изменение матриц Qi, Ri задают в виде:

где:

Область Ω задают ограничениями на минимальные и максимальные значения модулей угловых скоростей:

Смысл ограничений (16) состоит в выделении участков полета с наиболее информативными вращениями самолета для оценивания углов ориентации и, прежде всего, рыскания, как наименее наблюдаемого. При удовлетворительном оценивании рыскания погрешности оценок углов наклона - крена и тангажа - в несколько раз меньше. Анализ погрешностей оценивания ориентации на типовых процессах движения самолета в обычном полете по заданному маршруту показал, что угловые скорости по важности вклада в наблюдаемость следует ранжировать в последовательности  То есть наиболее значимой, как и следовало ожидать, является угловая скорость по рысканию ωy и следующая за ней ωх.
То есть наиболее значимой, как и следовало ожидать, является угловая скорость по рысканию ωy и следующая за ней ωх.
Поэтому модуль угловой скорости вращения по рысканию  ограничивают только снизу, модуль угловой скорости вращения по крену
ограничивают только снизу, модуль угловой скорости вращения по крену  ограничивают снизу и сверху, а модуль угловой скорости вращения по тангажу
ограничивают снизу и сверху, а модуль угловой скорости вращения по тангажу  ограничивают сверху. Это означает, что на участках наблюдаемости модуль
ограничивают сверху. Это означает, что на участках наблюдаемости модуль  может быть сколь угодно большим, модуль
может быть сколь угодно большим, модуль  должен находиться в заданных пределах, а модуль
должен находиться в заданных пределах, а модуль  не должен превышать определенной величины.
не должен превышать определенной величины.
Область N задают ограничениями на максимальные значения модулей производных связанных скоростей, в рамках которых правомерно применение упрощенных соотношений (11) для оценок линейных ускорений:

Формирование коэффициентов для определения областей Ω, N и элементов матриц  является задачей оптимизации алгоритма фильтрации, которая рассматривается ниже.
является задачей оптимизации алгоритма фильтрации, которая рассматривается ниже.
Коррекция измерений инерциальных датчиков
Для коррекции используют оценки углов ориентации, полученные на участках наблюдаемости, с целью уточнения измерений датчиков ДУС и ДЛУ. При этом появляется возможность применения скорректированных измерений на всех участках полета.
Для коррекции используют средние оценки смещений нулей, определяемые путем усреднения точечных оценок по времени наблюдаемости.
Текущее время наблюдаемости tni определяют с помощью счетчика наблюдаемости j, который подсчитывает число отсчетов дискретного времени Δt, на которых выполняются условия наблюдаемости:

Здесь ji - текущее состояние счетчика; tni - текущее время наблюдаемости.
Усредненные оценки смещений нулей ДУС вычисляют рекуррентно при pn=1 с использованием кинематических соотношений для оценок угловых скоростей:
Аналогично, при pn=1 вычисляют усредненные по времени наблюдаемости смещения нулей датчиков ДЛУ:

Полученные оценки смещения нулей для ДУС  и оценки смещения нулей для ДЛУ
и оценки смещения нулей для ДЛУ  используют в (8) и (9) по истечении заданного минимального времени усреднения
используют в (8) и (9) по истечении заданного минимального времени усреднения 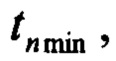 достаточного для достижения усредненными оценками смещений нулей установившихся значений.
достаточного для достижения усредненными оценками смещений нулей установившихся значений.
Величина  имеет порядок 30-60 секунд. Полученные оценки могут быть запомнены и использованы в последующих полетах при аналогичных условиях.
имеет порядок 30-60 секунд. Полученные оценки могут быть запомнены и использованы в последующих полетах при аналогичных условиях.
Методика оценивания
Поскольку рассматриваемая задача является нелинейной, то синтезируемый алгоритм не является фильтром Калмана в классической постановке, и классифицируется как нелинейный субоптимальный фильтр первого порядка приближения при гауссовской аппроксимации априорных и апостериорных плотностей распределения вектора состояния [2]. Размерность фильтра равна трем.
Рассмотрим по шагам вычисления, выполняемые на одном интервале дискретизации Δt.
Шаг 1. Ввод текущих измерений датчиков и приемника СНС:
 Коррекция измерений ДУС и ДЛУ (8), (9) с учетом оценок смещений нулей на прошлом интервале Δt, если время наблюдаемости превысило порог
Коррекция измерений ДУС и ДЛУ (8), (9) с учетом оценок смещений нулей на прошлом интервале Δt, если время наблюдаемости превысило порог 
Шаг 2. Оценка производных связанных скоростей (14).
Шаг 3. Контроль условий наблюдаемости по скорректированным измерениям ДУС, ДЛУ и оценкам производных связанных скоростей. Формирование признака наблюдаемости (13). Вычисление времени наблюдаемости (18).
Шаг 4. Формирование матриц Qi, Ri (15).
Шаг 5. Прогноз ориентации (8).
Шаг 6. Формирование матрицы Якоби Hi (12)
Шаг 7. Решение уравнений фильтра первого порядка приближения:

где:  определяют соотношениями (9) и (11);
определяют соотношениями (9) и (11);  - математическое ожидание и ковариационная матрица апостериорного нормального распределения
- математическое ожидание и ковариационная матрица апостериорного нормального распределения 
 - процедура перечета углов ориентации в кватернион;
- процедура перечета углов ориентации в кватернион;  - оценка углов от кинематических уравнений кватернионов, скорректированных на предыдущем шаге.
- оценка углов от кинематических уравнений кватернионов, скорректированных на предыдущем шаге.
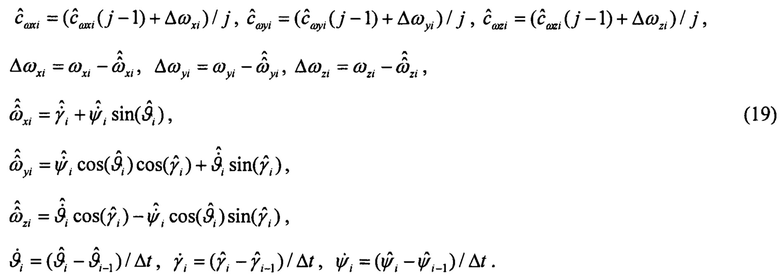
Шаг 8. Оценка смещений нулей ДУС (19) и ДЛУ (20) для учета на следующем интервале Δt.
При запуске алгоритма начальную оценку рыскания принимают равной углу пути  начальные оценки крена и тангажа задаются нулевыми
начальные оценки крена и тангажа задаются нулевыми 
Результаты исследований
При настройке коэффициентов алгоритма решаются две взаимосвязанные задачи - определение коэффициентов для областей Ω, N и элементов матриц  Для этого используют процессы движения, характерные для ЛА интересующего типа.
Для этого используют процессы движения, характерные для ЛА интересующего типа.
В данной работе применялись зависимости параметров полета легкого самолета от времени, полученные помощью авиасимулятора, которые дополнялись имитацией измерений датчиков и приемника СНС.
На фиг. 4 представлено изменение угла сноса, как рассогласования между рысканием и углом пути.
Критерием качества оценивания ориентации выбран усредненный по всему полету модуль погрешностей оценок крена, тангажа и рыскания:

Черта сверху означает операцию усреднения по всем отсчетам измерений датчиков.
Отправными значениями для иллюстрации оптимизации областей Ω, N и элементов матриц  приняты величины, близкие к оптимальным:
приняты величины, близкие к оптимальным:
На фиг. 5 представлены результаты расчетов критерия качества (22) при варьировании  для области угловых скоростей Ω в соответствии с (16).
для области угловых скоростей Ω в соответствии с (16).
На фиг. 6 представлены результаты расчетов критерия качества (22) при варьировании  для области N в соответствии с (17), для оценок производных связанных скоростей
для области N в соответствии с (17), для оценок производных связанных скоростей 
На фиг. 7 и 8 представлены результаты расчетов критерия качества (22) при варьировании  для переключения значений дисперсий возмущений и шумов наблюдений в матрицах Qi и Ri в соответствии с (15).
для переключения значений дисперсий возмущений и шумов наблюдений в матрицах Qi и Ri в соответствии с (15).
Из фиг. 5-8 следует, что существуют значения коэффициентов для Ω, N и элементов матриц  обеспечивающие значение критерия (22) менее одного градуса в достаточно широком диапазоне их варьирования относительно оптимальных значений.
обеспечивающие значение критерия (22) менее одного градуса в достаточно широком диапазоне их варьирования относительно оптимальных значений.
Погрешности оценивания рыскания, тангажа и крена при использовании предлагаемого алгоритма представлены на рисунках 9, 10, 11 кривыми 3. Соответствующие им оценки представлены на фиг. 1, 2, 3 кривыми 3.
Для иллюстрации преимуществ разработанного алгоритма кривыми 2 на фиг. 9, 10, 11 представлены погрешности оценивания углов для случая, когда коррекция смещений нулей датчиков не производится. Оценки углов, соответствующие отключению и использованию коррекции, представлены на фиг. 1, 2, 3 кривыми 2 и 3 соответственно. При отключении коррекции точность ориентации снижается. Рассматривался также самый грубый случай, когда помимо отключения коррекции принимались постоянными 
 матрицы возмущений и шумов измерений. Погрешности оценивания углов для этого случая представлены на фиг. 9, 10, 11 кривыми 1, из чего следует, что матрицы Q, R не следует полагать постоянными.
матрицы возмущений и шумов измерений. Погрешности оценивания углов для этого случая представлены на фиг. 9, 10, 11 кривыми 1, из чего следует, что матрицы Q, R не следует полагать постоянными.
Из приведенных расчетов следует, что выделение участков наблюдаемости ориентации и изменение интенсивности возмущений и шумов наблюдения в математических моделях фильтра, а также коррекция смещений нулей инерциальных датчиков существенно повышают точность ориентации и представляются оправданными.
Технический результат
Получен новый результат, заключающийся в создании способа коррекции углов ориентации самолета по измерениям инерциальных датчиков и одного приемника спутниковой навигационной системы, который повышает точность ориентации за счет оценивания смещений нулей измерений датчиков ДУС и ДЛУ.
Предложенный алгоритм имеет практическое значение, так как позволяет повысить точность ориентации ЛА самолетного типа при использовании в БИНС самолета инерциальных датчиков среднего и нижнего уровня точности, имеющих существенно меньшую стоимость, чем датчики навигационного класса точности.
Список литературы
1. Динамика полета: Учебник для студентов высших учебных заведений // А.В. Ефремов, В.Ф. Захарченко, В.И. Овчаренко и др.; под ред. Г.С. Бюшгенса. - М.: Машиностроение, 2011. - 776 с.: ил.
2. Сейдж Э., Меле Дж. Теория оценивания и ее применение в связи и управлении. - М.: Издательство «Связь», 1976. - 496 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2256154C1 |
| СИСТЕМА ИЗМЕРЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2244262C2 |
| Способ коррекции углов ориентации БИНС на скользящем интервале | 2022 |
|
RU2790076C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Адаптивный способ коррекции углов ориентации БИНС | 2020 |
|
RU2754396C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |








Изобретение относится к измерительной технике, а конкретно к системам инерциальной навигации. Сущность предлагаемого способа заключается в совместном оценивании крена, тангажа и рыскания летательного аппарата по измерениям трехкомпонентных датчиков угловых скоростей и линейных ускорений, одного приемника спутниковой навигационной системы по алгоритму нелинейного субоптимального фильтра первого порядка приближения калмановского типа. При этом субоптимальный фильтр имеет третий порядок вектора состояния. Техническим результатом заявленного изобретения является повышение точности бесплатформенной инерциальной навигационной системы и уменьшение требуемых вычислительных затрат. 11 ил.
Способ коррекции углов ориентации ЛА по сигналам от одноантенной спутниковой навигационной системы (СНС), при котором по сигналам, поступающим от датчиков угловых скоростей (ДУС) и от датчиков линейных ускорений (ДЛУ), определяют углы крена и тангажа летательного аппарата (ЛА), совместно обрабатывают сигналы, соответствующие линейным ускорениям, с сигналами, соответствующими линейным ускорениям, полученными путем преобразования параметров полета ЛА, используя при этом сигналы земной скорости от СНС, оценивают углы крена и тангажа посредством фильтра Калмана и осуществляют коррекцию углов крена и тангажа БИНС, отличающийся тем, что дополнительно используют и определяют: нелинейный субоптимальный фильтр первого порядка приближения калмановского типа, имеющего третий порядок вектора состояния, сигналы соответствующие линейным скоростям, полученные от одноантенного приемника СНС и их проекции в связанную систему координат, используют сигналы, соответствующие линейным ускорениям ЛА, которые получают путем сглаживания и дифференцирования сигналов скоростей от приемника СНС с последующим проецированием их в связанную систему координат, в уравнении измерений следят за изменениями перегрузок, полученных от датчиков ДЛУ и перегрузок, вычисленных по сигналам от СНС и текущим параметрам полета ЛА, определяют условия наблюдаемости для фильтра и выделяют участки полета с хорошей наблюдаемостью, на участках наблюдаемости оценивают смещение нулевых сигналов ДУС и ДЛУ, корректируют показания датчиков и уточняют текущий угол курса (рыскания).
| Адаптивный способ коррекции углов ориентации БИНС | 2020 |
|
RU2754396C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2015 |
|
RU2614192C1 |
| CN 111811537 A, 23.10.2020 | |||
| WO 2004063669 A2, 29.07.2004. | |||

