Изобретение относится к измерительной технике и может быть использовано для морских, воздушных и наземных объектов. Задачей изобретения является повышение точности бесплатформенной инерциальной навигационной системы (БИНС) путем создания устройства непрерывной коррекции инерциальной курсовертикали.
Классическим алгоритмом вычисления углов ориентации является пересчет показаний датчиков угловых скоростей (ДУС) / проекций абсолютной угловой скорости - ωx, ωy, ωz / в угловые скорости 


Известна бесплатформенная инерциальная курсовертикаль, описанная в патенте RU 2249791 C2, МПК G01C 21/16, опубл. 10.04.2005, принятая нами за прототип.
Данная бесплатформенная инерциальная курсовертикаль с контуром коррекции содержит трехканальный блок датчиков угловых скоростей (ДУС), трехканальный блок датчиков линейных ускорений (ДЛУ), блок интеграторов, формирователь производных от углов ориентации, блок коррекции, блок вычисления наблюдаемой вертикали, блок вычисления ошибок курсовертикали, фильтр, блок выставки курса.
Угловые скорости, измеренные трехканальным блоком ДУС и преобразованные в производные от углов ориентации, содержат ошибки, обусловленные систематическими и случайными погрешностями измерений. Предполагается, что при интегрировании угловых скоростей ошибка не накапливается из-за вычитания постоянных составляющих ошибки. Крен и тангаж корректируются блоком коррекции с использованием сигналов ДЛУ. Курс корректируется блоком коррекции с использованием блока выставки курса. Ошибки курсовертикали компенсируются в блоке коррекции, проходя через фильтр высоких частот.
Недостаток данного устройства заключается в том, что при маневрировании ЛА моменты времени, когда оценки крена и тангажа обладают достаточной точностью, могут возникать недопустимо редко из-за наличия в сигналах акселерометров медленно меняющихся и быстро меняющихся линейных и поворотных ускорений. Это может привести к возникновению значительных погрешностей в показаниях крена и тангажа.
Целью изобретения является обеспечение непрерывной коррекции БИНС по углам крена и тангажа с требуемой точностью, в том числе и в динамических режимах полета.
Поставленная цель достигается за счет того, что в бесплатформенную инерциальную курсовертикаль, содержащую трехкомпонентный блок датчиков угловых скоростей, трехкомпонентный блок датчиков линейных ускорений, корректор курса и интегрирующий блок, выходы которых подключены соответственно к первому, второму, третьему и четвертому входам вычислительного блока, дополнительно введены блок формирования матрицы направляющих косинусов, фильтр Калмана и блок формирования функций измерений, причем первые входы блока формирования направляющих косинусов, фильтра Калмана и блока формирования функций измерений соединены с выходом трехкомпонентного блока датчиков угловых скоростей, вторые входы фильтра Калмана и блока формирования функций измерений соединены с выходом трехкомпонентного блока датчиков линейных ускорений, выход блока формирования матрицы направляющих косинусов подключен к интегрирующему блоку, выход фильтра Калмана подключен к второму входу блока формирования матрицы направляющих косинусов и к третьему входу блока формирования функций измерений, выход которого подключен к третьему входу фильтра Калмана.
Сущность изобретения поясняется чертежами, где приведены:
на фиг. 1 - структурная схема заявляемого устройства;
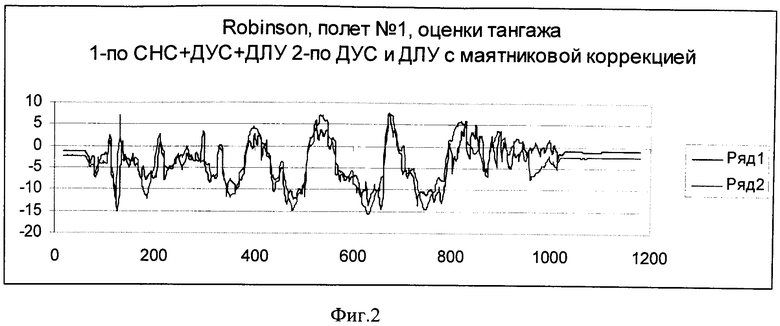
на фиг. 2, 3 графически представлены результаты обработки полетных данных вертолета с заявляемой курсовертикалью (оценки тангажа - фиг. 2 и оценки крена - фиг. 3).
Бесплатформенная инерциальная курсовертикаль (фиг. 1) содержит трехкомпонентный блок 1 датчиков угловых скоростей, трехкомпонентный блок 2 датчиков линейных ускорений, корректор 3 курса, вычислительный блок 4, блок 5 формирования матрицы направляющих косинусов, интегрирующий блок 6, фильтр 7 Калмана и блок 8 формирования функций измерений, соединенные между собой соответствующим образом.
Предлагаемая структурная схема устройства обеспечивает адаптивную (маятниковую) коррекцию курсовертикали БИНС, реализуемую посредством фильтра 7 Калмана, в котором коэффициент усиления изменяется с учетом текущих значений модулей перегрузки и угловой скорости в блоке 8.
Изменения крена и тангажа описываются уравнениями Пуассона в интегрирующем блоке 6. Уточнение углов ориентации происходит в блоке направляющих косинусов 5. В блоке 8 происходит преобразование сигналов акселерометров ДЛУ блока 2, в зависимости от текущих параметров полета, которые используются для адаптивного оценивания вектора состояния при помощи фильтра 7 Калмана. За счет этого зависимость точности маятниковой коррекции от вида движения ЛА ослабляется до уровня, позволяющего использовать датчики ДУС и ДЛУ средней и низкой точности, в том числе микромеханического типа. Курс БИНС корректируется по сигналам магнитометрических датчиков 3.
Суть работы устройства излагается ниже.
По измерениям блоков датчиков ДУС 1 и ДЛУ 2 определяются текущие углы крена γ, тангжа ϑ и рыскания ψ из уравнений Пуассона

где матрица направляющих косинусов А, задающая переход от навигационной системы координат (СК) PNUE к связанной СК OXYZ, и кососимметрическая матрица Ω имеют следующий вид:

Матричное уравнение Пуассона (1) решается в дискретном виде с учетом начальных условий матрицы направляющих косинусов А, то есть задаются начальные значения крена γ и тангажа, ϑ и угла рысканья ψ,
Расчет крена и тангажа по матрице поворота выполняется в вычислительном блоке 4 с помощью соотношений:
Вектор состояния адаптивного фильтра 7 Калмана представлен ниже:

где ϑ - тангаж, γ - крен, V - модуль вектора земной скорости на момент i,
i - номер дискретного момента времени измерений датчиков. При i=0, 

Вектор наблюдений, обозначаемый далее Z, содержит измерения акселерометров, поступающих с блока 2 датчиков линейных ускорений, и параметры полета ЛА

Здесь vi - вектор ошибок измерений с заданной постоянной ковариационной матрицей R. Функции fx, fy, fz определяют связь измерений перегрузок с параметрами полета. Точные соотношения для этих функций имеют вид:

Здесь Vx, Vy, Vz - проекции вектора земной скорости на связанные оси ЛА.
Полный учет соотношений (7) при ограничении состава датчиков только ДЛУ и ДУС не представляется возможным, поэтому принимается упрощающее допущение о малости углов атаки и скольжения, а также допущение о постоянстве модуля путевой скорости на интервале дискретизации Δt.
При этом имеют место соотношения: Vx=V, 


С учетом (7) матрица Якоби вектора наблюдений (8) имеет вид

Соотношения (8) являются приближенными. Степень приближения зависит от отклонения модуля перегрузки от единицы. Чем больше модуль перегрузки отличается от единицы, тем менее точны эти уравнения и тем больше дисперсии 



где 
Здесь k0,k1 - коэффициенты.
Текущий вектор состояния (5) рассчитывается по уравнениям Пуассона (1) с учетом (2), (3). При этом уравнения объекта принимаются в виде:

Здесь xiq - вектор, в котором компоненты крена и тангажа рассчитаны по соотношениям (3), а компонента скорости принимается равной ее априорному значению на момент текущих измерений; wi - вектор возмущений с ковариационной матрицей Qi:

Случайные процессы 





Фильтр Калмана строится для оценивания вектора состояния (5) с дискретной моделью объекта (3) и дискретной моделью наблюдения (9) с учетом (10).
Для запуска алгоритма фильтра используются статистики х0, 
При очередном i-ом отсчете измерений датчиков фильтр 7 Калмана определяет статистики 



Расчет статистик апостериорного распределения 

Здесь Ki - матричный коэффициент усиления фильтра; 
Работа заявляемого устройства проверялась на вертолете Robinson и оценивалась посредством обработки полетных данных вертолета, для чего:
1. Определялась ориентация ЛА по алгоритму комплексирования измерений приемника СНС с датчиками ДУС и ДЛУ на скользящем интервале наблюдений.
2. Определялись крен и тангаж по алгоритму при помощи бесплатформенной инерциальной курсовертикали с маятниковой коррекцией.
В задачах обработки полетных данных вертолета (фиг. 2 и 3) требовалось соблюдение близости оценок крена и тангажа к оценкам, полученным иным способом, а именно - с помощью алгоритма ориентации при комплексировании информации от ДУС и ДЛУ с измерениями проекций земной скорости, поступающими от приемника СНС. Также проверялось соответствие получаемых оценок показаниям контрольного прибора.
Для случаев, когда положение ЛА является близким к установившемуся, имеет место идеальный случай адаптивной маятниковой коррекции. При этом оценки крена и тангажа, определяемые по фильтру Калмана, заменяются оценками, вычисляемыми непосредственно по показаниям ДЛУ в вычислителе.

Таким образом, с помощью предлагаемого устройства решается задача оценивания вектора (5) 
Расчеты показывают, что устройство работает при изменении углов тангажа и крена в пределах абсолютных значений до 70-80 градусов.
Техническим результатом использования изобретения является повышение точности и обеспечение непрерывности коррекции углов тангажа и крена в условиях маневрирования в полете. Изобретение позволяет использовать датчики ДУС и ДЛУ средней и низкой точности, в том числе микромеханического типа.
Заявляемое устройство является реализуемым и может быть использовано на всех типах ЛА. В качестве датчиков угловых скоростей могут быть использованы микромеханические гироскопические датчики, при этом блок формирования матрицы направляющих косинусов, фильтр Калмана и блок формирования функций измерений могут быть реализованы на стандартных элементах вычислительной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2647205C2 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2646954C2 |
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО АППАРАТА, ПОДВЕШЕННОГО К САМОЛЕТУ-НОСИТЕЛЮ | 2014 |
|
RU2553776C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |

Изобретение относится к измерительной технике и может найти применение в навигационных системах морских, воздушных и наземных объектов. Технический результат - расширение функциональных возможностей. Для этого устройство содержит трехкомпонентный блок датчиков угловых скоростей, трехкомпонентный блок датчиков линейных ускорений, корректор курса, вычислительный блок, блок формирования матрицы направляющих косинусов, интегрирующий блок, фильтр Калмана и блок формирования функций измерений, соединенных между собой соответствующим образом. Схема устройства обеспечивает адаптивную (маятниковую) коррекцию БИНС, реализуемую посредством фильтра Калмана, в котором коэффициент усиления изменяется с учетом текущих значений модулей перегрузки и угловой скорости в блоке формирования функций измерений. При этом могут быть использованы датчики ДУС и ДЛУ средней и низкой точности, в том числе микромеханического типа. 3 ил.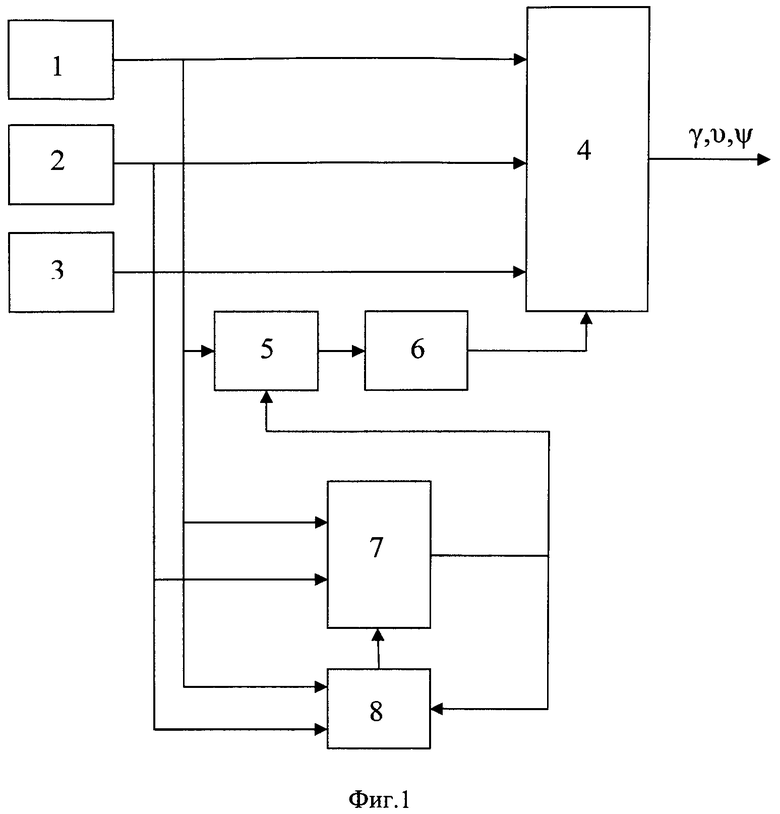
Бесплатформенная инерциальная курсовертикаль, содержащая трехкомпонентный блок датчиков угловых скоростей, трехкомпонентный блок датчиков линейных ускорений, корректор курса и интегрирующий блок, выходы которых подключены соответственно к первому, второму, третьему и четвертому входам вычислительного блока, отличающаяся тем, что в нее дополнительно введены блок формирования матрицы направляющих косинусов, фильтр Калмана и блок формирования функций измерений, причем первые входы блока формирования матрицы направляющих косинусов, фильтра Калмана и блока формирования функций измерений соединены с выходом трехкомпонентного блока датчиков угловых скоростей, вторые входы фильтра Калмана и блока формирования функций измерений соединены с выходом трехкомпонентного блока датчиков линейных ускорений, выход блока формирования матрицы направляющих косинусов подключен к интегрирующему блоку, выход фильтра Калмана подключен к второму входу блока формирования матрицы направляющих косинусов и к третьему входу блока формирования функций измерений, выход которого подключен к третьему входу фильтра Калмана.
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2003 |
|
RU2249791C2 |
| РИВКИН С.С | |||
| Метод оптимальной фильтрации Калмана и его применение в инерциальных навигационных системах | |||
| - Л.: Судостроение, 1974, 219 с | |||
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ | 2012 |
|
RU2487318C1 |
| US 6408245 B1, 18.06.2002 | |||
| СПОСОБ ПЕРЕРАБОТКИ МОНАЦИТА | 2005 |
|
RU2323989C2 |

