ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к датчикам потока и, в частности, к датчикам для измерения кровотока.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Измерение кровотока представляет интерес по многим разным причинам, связанным с диагностикой.
Один пример предназначен для диагностики стеноза, который представляет собой вид заболевания артерий, при котором кровоток ограничен вследствие локального сужения кровеносного сосуда, например, из-за бляшки, образовавшейся на стенке сосуда.
Оценке стеноза и лечению могут способствовать датчики с проводниками (CMUT, пьезокристаллические, резисторы), которые измеряют или локальный кровоток, или локальное кровяное давление. Однако или давление, или поток сами по себе не обеспечивают достаточного объяснения сложной гемодинамики при стенозе. Поэтому были разработаны проводники с множеством датчиков, но это приводит к сложным устройствам.
Кроме того, датчики потока представляют собой сложные устройства, и более простой подход к измерению представляет интерес.
Помимо функции измерения проводники также предпочтительно обладают хорошей способностью к управлению направлением перемещения в малых и извилистых сосудах. Встраивание механического актуатора для управления направлением перемещения наконечника может быть использовано для обеспечения управляемости, но, с другой стороны, это увеличивает сложность устройства.
В WO 2006/135293 раскрыт имплантируемый датчик потока на основе нагрева и последующего анализа охлаждения, вызываемого потоком. В US 4 726 225 раскрыт измеритель скорости потока, который измеряет поток на основе снижения температуры.
Следовательно, было бы желательно иметь простую конструкцию датчика, которая обеспечивает возможность измерения потока, и которая также предпочтительно может образовывать часть одного многофункционального компонента для измерения потока, а также измерения давления и/или приведения в действие.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно примерам, соответствующим аспекту изобретения, предложен датчик потока, содержащий:
компоновку устройства электроактивного материала;
привод для управления компоновкой устройства электроактивного материала для локального подвода тепла к текучей среде, поток которой подлежит измерению; и
контроллер, выполненный с возможностью:
- считывания измерительных сигналов от компоновки устройства электроактивного материала, при этом указанные измерительные сигналы относятся к температуре на устройстве электроактивного материала; и
- использования измерительных сигналов для определения результата измерения потока,
при этом контроллер выполнен с возможностью считывания измерительных сигналов посредством предоставления показаний датчика для выполнения измерений электрической характеристики, которая содержит импеданс или фазовый угол импеданса устройства электроактивного материала, по меньшей мере, при первой частоте и при второй частоте, отличающейся от первой частоты, при этом контроллер выполнен с возможностью определения температуры на датчике с электроактивным материалом из результатов измерений.
В данной компоновке используется компоновка устройства электроактивного материала (при этом «компоновка» может иметь одно или более отдельных устройств с электроактивным материалом) для подвода тепла к среде и для последующего мониторинга или регулирования температуры, получающейся в результате, так, чтобы можно было определить параметры потока (который отводит тепло). Можно осуществлять мониторинг скорости охлаждения или можно осуществлять мониторинг электрического нагрева, который требуется для поддержания определенной температуры.
Устройство может быть выполнено с возможностью измерения давления (или силы) и температуры даже во время привидения в действие. Это может быть обеспечено посредством использования наложения управляющего сигнала и измерительных сигналов. Использование высокочастотного электрического сигнала с малой амплитудой, измеряемого попеременно при двух разных частотах, позволяет устранить взаимовлияние температуры и давления. Таким образом, температура может быть измерена при любом давлении. Кроме того, при желании также может быть определен уровень давления.
Привод может быть выполнен с возможностью выдачи управляющих сигналов с частотой, превышающей резонансную частоту устройства электроактивного материала. Это означает, что управляющие сигналы преднамеренно приводят к локальному нагреву и, следовательно, не являются наиболее эффективным сигналами для приведения в действие электроактивного материала.
В одной конструкции привод выполнен с возможностью подвода тепла в течение заданного промежутка времени, и контроллер выполнен с возможностью считывания измерительных сигналов для мониторинга функции последующего падения температуры и преобразования постепенного изменения измерительных сигналов, происходящего в течение некоторого времени, в результат измерения потока посредством этого.
Таким образом происходит мониторинг того, как отводится тепло из зоны, подлежащей измерению.
Контроллер может быть, например, выполнен с возможностью измерения промежутка времени до того момента, когда температура достигнет базовой температуры, и преобразования постепенного изменения измерительных сигналов, происходящего в течение некоторого времени, в результат измерения потока посредством этого.
В другой конструкции привод выполнен с возможностью непрерывного подвода тепла в течение промежутка времени измерения потока, и контроллер выполнен с возможностью считывания измерительных сигналов для мониторинга установившейся температуры. Таким образом, осуществляется мониторинг установившейся температуры при известном подводе тепла.
В еще одной конструкции привод выполнен с возможностью подвода тепла в течение промежутка времени измерения потока, и контроллер выполнен с возможностью регулирования скорости подвода тепла для достижения заданной установившейся температуры. Таким образом, осуществляется мониторинг количества подводимого тепла для достижения известной температуры. Для этого контроллер может регулировать коэффициент заполнения или частоту импульсов подвода тепла.
Во всех вышеприведенных примерах компоновка устройства электроактивного материала может содержать одно устройство электроактивного материала, функционирующее как в качестве нагревателя, так и в качестве датчика температуры.
Вместо этого компоновка устройства электроактивного материала может содержать компоновку устройства электроактивного материала, которое функционирует в качестве нагревателя, и второго и третьего устройств с электроактивным материалом, функционирующих в качестве датчиков. Они могут находиться с противоположных сторон нагревателя, так что может осуществляться мониторинг градиентов температуры на каждой стороне нагревателя.
Компоновка устройства электроактивного материала может дополнительно функционировать в качестве датчика давления и/или актуатора. Таким образом, одно и то же устройство может быть использовано для измерения потока, для воздействия (такого как управление направлением перемещения зонда) и/или для измерения давления. Измерение давления может использоваться, например, для измерения давления нагрузки, например, на кожу.
Датчик давления может быть использован для измерения внешней силы или внешнего давления (внешних средств на наружной поверхности ЭАП). Внешняя сила или внешнее давление может быть результатом контакта с кожей на теле или контакта со стенкой кровеносного сосуда внутри тела, или кровяного давления в артерии внутри тела.
Количественное соотношение между кровяным давлением и реакцией конкретной конфигурации актуатора с ЭАП будет точно определено как часть разработки изделия.
В изобретении используются измерения при двух частотах.
Первая частота представляет собой, например, резонансную частоту, при которой импеданс или фазовый угол импеданса имеет максимальное или минимальное значение, такую как антирезонансная частота. Измерение при данной частоте может быть использовано для определения внешней силы или внешнего давления.
Когда сигнал подается при частоте, которая соответствует антирезонансной частоте (незатухающих колебаний), внезапное рассогласование, вызванное приложенной нагрузкой, обнаруживается, например, в виде результирующего падения импеданса, измеренного на датчике.
В альтернативном варианте можно использовать сигнал возбуждения, который соответствует резонансной частоте (незатухающих колебаний). В этом случае рассогласование может быть обнаружено в виде результирующего скачка импеданса, измеренного на датчике. Таким образом, в любом из двух случаев высокочастотный сигнал обеспечивает возможность измерения внешнего давления или внешней силы, приложенного (-й) к устройству одновременно с привидением в действие.
Вторая частота может представлять собой частоту, при которой электрическая характеристика является постоянной по отношению к нагрузке. Вместо этого она изменяется в зависимости от температуры и, следовательно, может быть использована для измерения температуры.
Система управления может быть выполнена с возможностью подачи управляющего сигнала на который накладываются измерительные сигналы при первой и второй частотах, при этом сигнал возбуждения представляет собой возбуждающий сигнал постоянного тока или возбуждающий сигнал переменного тока с частотой, которая ниже первой и второй частот.
При наложении низкоамплитудного высокочастотного измерительного сигнала на первичный сигнал возбуждения с большей амплитудой могут одновременно выполняться функции измерения и приведения в действие.
Два измерительных сигнала с разными частотами могут быть поданы последовательно. В альтернативном варианте результаты измерений при разных частотах могут быть наложены, поскольку значение нерезонансной частоты может быть выбрано свободно.
Изобретение будет «работать» с электроактивными материалами в целом. Однако особенно подходящими материалами являются органические электроактивные материалы и/или полимерные электроактивные материалы. Они имеют электроактивные характеристики, подходящую зависимость от температуры, а также легко поддаются обработке для их встраивания в устройства, используемые, например, в просветах тела (например, в катетеры). Электроактивный материал (полимер) может содержать релаксорный ферроэлектрик. В качестве неограничивающего примера таких полимерных материалов могут быть использованы релаксорные ферроэлектрики на основе терполимеров (то есть PVDF-TrFE-CFE (поливинилиденфторид-трифторэтилен-хлорфторэтилен) или PVDF-TrFE-CTFE (поливинилиденфторид-трифторэтилен-хлортрифторэтилен)). Они не являются ферроэлектрическими при отсутствии приложенного поля, что означает, что отсутствует какая-либо электромеханическая связь, когда не подан никакой сигнал возбуждения. При подаче, например, сигнала напряжения смещения постоянного тока электромагнитная связь становится ненулевой. Релаксорные ферроэлектрики обеспечивают бóльшие величины деформации при приведении в действие и бóльшую чувствительность при измерениях по сравнению с другими известными электроактивными полимерными материалами.
Однако устройство не ограничено применением релаксорных ферроэлектриков, и пьезоэлектрические электроактивные полимерные материалы (например, PVDF (поливинилиденфторид), или PVDF-TrFE (поливинилиденфторид-трифторэтилен), приведенные только в качестве примера) также могут быть использованы, например, в вариантах осуществления.
Датчик может образовывать часть катетера или проводника.
В примерах согласно второму аспекту изобретения предложен способ измерения скорости потока, включающий в себя:
управление компоновкой устройства электроактивного материала для локального подвода тепла к текучей среде, скорость потока которой подлежит измерению;
считывание измерительных сигналов от компоновки устройства электроактивного материала, при этом указанные измерительные сигналы относятся к температуре на устройстве электроактивного материала; и
использование измерительных сигналов для определения результата измерения потока;
при этом считывание измерительных сигналов включает предоставление показаний датчика для выполнения измерений электрической характеристики, которая представляет собой импеданс или фазовый угол импеданса устройства электроактивного материала, по меньшей мере, при первой частоте и при второй частоте, отличающейся от первой частоты, и определение температуры на датчике с электроактивным материалом из результатов измерений.
Способ может включать подачу управляющих сигналов с частотой, превышающей резонансную частоту устройства электроактивного материала.
При одном подходе способ включает подвод тепла в течение заданного промежутка времени и считывание измерительных сигналов для мониторинга функции последующего падения температуры, и посредством этого преобразование постепенного изменения измерительных сигналов, происходящего в течение некоторого времени, в результат измерения потока. Могут осуществляться, например, измерение промежутка времени до того момента, когда температура достигнет базовой температуры, и посредством этого преобразование постепенного изменения измерительных сигналов, происходящего в течение некоторого времени, в результат измерения потока.
При другом подходе способ включает непрерывный подвод тепла в течение промежутка времени измерения потока и считывание измерительных сигналов для мониторинга установившейся температуры.
При еще одном подходе способ включает подвод тепла в течение промежутка времени измерения потока и регулирование скорости подвода тепла для достижения заданной установившейся температуры.
Способ может дополнительно включать измерение давления и/или приведение в действие.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры изобретения будут описаны далее подробно со ссылкой на сопровождающие чертежи, в которых:
фиг.1 показывает известное устройство с электроактивным полимером, которое не зажато;
фиг.2 показывает известное устройство с электроактивным полимером, которое удерживается защитным слоем;
фиг.3 показывает устройство для измерения потока;
фиг.4 показывает первый способ измерения скорости потока на основе температурной функции;
фиг.5 показывает второй способ измерения скорости потока на основе температурной функции;
фиг.6 показывает третий способ измерения скорости потока на основе температурной функции;
фиг.7 показывает четвертый способ измерения скорости потока на основе температурной функции;
фиг.8 показывает устройство для измерения потока, установленное на наконечнике катетера;
фиг.9 показывает первый пример устройства с электроактивным полимером для разъяснения способа измерения температуры;
фиг.10 показывает способ калибровки;
фиг.11 представляет собой график для демонстрации того, как может быть использована только функция измерения;
фиг.12 показывает способ измерения, предназначенный для использования после калибровки;
фиг.13 показывает устройство с электроактивным полимером по фиг.3 более подробно;
фиг.14 показывает одну схему, эквивалентную устройству с ЭАП;
фиг.15 показывает изменения сопротивления и емкости в зависимости от частоты;
фиг.16 показывает изменения в зависимости от частоты при двух разных напряжениях приведения в действие;
фиг.17 показывает, как различие между графиками по фиг.10 может быть использовано для идентификации резонансных частот;
фиг.18 показывает зависимость импеданса от нагрузки для разных температур при резонансе;
фиг.19 показывает зависимость импеданса от нагрузки для разных температур не при резонансе;
фиг.20 показывает повторяемость зависимости импеданса от температуры;
фиг.21 показывает, как компенсация температуры может быть использована для улучшения измерения нагрузки;
фиг.22 используется для разъяснения того, как могут быть использованы измерения фазы;
фиг.23 показывает чувствительность иллюстративного материала с определенным составом в зависимости от температуры;
фиг.24 показывает зависимость между чувствительностью и составом;
фиг.25 показывает результаты первых измерений для демонстрации выполнимости функции нагрева;
фиг.26 показывает результаты вторых измерений для демонстрации выполнимости функции нагрева; и
фиг.27 показывает результаты третьих измерений для демонстрации выполнимости функции нагрева.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В соответствии с изобретением предложен датчик потока, содержащий устройство электроактивного материала. Привод управляет устройством электроактивного материала для локального подвода тепла к текучей среде, поток которой должен быть измерен. Получают сигналы измерения температуры, и они используются для определения результата измерения потока. То, каким образом рассеивается тепло, связано с потоком, и он поддается измерению на основе сигналов измерения температуры.
Измерение температуры включает в себя измерение электрической характеристики, которая представляет собой импеданс или фазовый угол импеданса устройства электроактивного материала, по меньшей мере, при первой частоте и при второй частоте, отличающейся от первой частоты. Таким образом, взаимные влияния температуры и давления могут быть устранены, так что температура может быть измерена при любом давлении.
В изобретении используется актуатор, в котором используется электроактивный материал (ЭАМ)). Это класс материалов в области электрически реагирующих материалов. Когда они применяются в воздействующем устройстве, подвергание ЭАМ воздействию электрического управляющего сигнала может вызвать изменение его размера и/или формы. Этот эффект может использоваться для приведения в действие и измерения.
Существуют неорганические и органические ЭАМ.
Особым видом органических ЭАМ являются электроактивные полимеры (ЭАП). Электроактивные полимеры (ЭАП) представляют собой развивающийся класс электрически реагирующих материалов. ЭАП подобно ЭАМ могут функционировать в качестве датчиков или актуаторов, но могут быть легче изготовлены с разными формами, позволяющими легко встраивать их в самые разные системы. Другие преимущества ЭАП включают низкую мощность, малый форм-фактор, гибкость, бесшумную работу и точность, возможность получения высокого разрешения, малое время реакции и циклическую активацию. Устройство с ЭАП может быть использовано в любом применении, в котором желательна малая величина перемещения компонента или элемента на основе электрического приведения в действие. Аналогичным образом, данная технология может быть использована для измерения малых перемещений. Использование ЭАП создает возможность выполнения функций, которые были невозможны ранее, или обеспечивает существенное преимущество по сравнению с обычными решениями, связанными с датчиками/актуаторами, вследствие комбинации сравнительно большой деформации и силы при малом объемном коэффициенте или малом форм-факторе по сравнению с обычными актуаторами. ЭАП также обеспечивают бесшумное функционирование, точное электронное управление, быструю реакцию и большой диапазон возможных частот возбуждения, таких как 0 - 20 кГц.
В качестве примера того, как устройство с ЭАМ может быть создано и может функционировать, фиг.1 и 2 показывают два возможных способа функционирования устройства с ЭАП, которое содержит слой 14 электроактивного полимера, размещенный между электродами 10, 12, расположенными с противоположных сторон слоя 14 электроактивного полимера.
Фиг.1 показывает устройство, которое не прижато к несущему слою. Используется напряжение для обеспечения расширения слоя электроактивного полимера во всех направлениях, как показано.
Фиг.2 показывает устройство, которое спроектировано так, что расширение возникает только в одном направлении. Для этого структура по фиг.1 прижата или прикреплена к несущему слою 16. Напряжение используется для обеспечения изгибания или выгибания слоя электроактивного полимера. Данное перемещение возникает вследствие взаимодействия между активным слоем, который расширяется при приведении в действие, и пассивным несущим слоем, который не расширяется.
Изобретение представляет особый интерес для применения в датчике, который не только выполняет измерение потока, но и также выполняет другие функции.
В частности, структура с электроактивным полимером, подобная описанной выше, может быть использована как для оказания воздействия, так и для измерения. Наиболее известные механизмы измерений базируются на измерениях силы и обнаружении деформации. Диэлектрические эластомеры, например, могут быть легко растянуты под действием внешней силы. При подаче низкого напряжения на датчик может быть измерена деформация в зависимости от напряжения (напряжение зависит от площади).
Другим способом измерения посредством систем, возбуждаемых полем, является непосредственное определение изменения емкости или определение изменений сопротивления электродов в зависимости от деформации.
Датчики на основе пьезоэлектрических и электрострикционных полимеров могут генерировать электрический заряд в качестве реакции на приложенное механическое напряжение (при условии, что степень кристалличности достаточно высока для генерирования обнаруживаемого заряда). Сопряженные полимеры могут обеспечить использование пьезо-ионного эффекта (механическое напряжение приводит к ионному воздействию). При подвергании углеродных нанотрубок (CNT) воздействию механического напряжения на их поверхности возникает изменение заряда, которое может быть измерено. Также было показано, что сопротивление углеродных нанотрубок изменяется в контакте с молекулами газов (например, O2, NO2), что делает углеродные нанотрубки пригодными в качестве детекторов газов.
Было предложено объединить измерительные и активирующие возможности устройств с ЭАП, например, для выполнения функций измерения давления и приведения в действие, как правило, в разные моменты времени. Пример описан в US2014/0139239.
Временное одновременное выполнение измерения и приведения в действие возможно при увеличении размеров устройства для включения отдельных, специально предусмотренных зон измерения и приведения в действие с разными комплектами электрических соединений. Однако это нецелесообразно в применениях, в которых малый форм-фактор имеет существенное значение.
Вместо этого одно устройство может быть использовано для измерения и для приведения в действие при обеспечении разных типов измерительного и возбуждающего сигналов. Этот подход будет дополнительно описан ниже.
Фиг.3 показывает датчик потока, содержащий компоновку 30 устройства электроактивного материала. В показанном примере имеется один слой 32 электроактивного материала, размещенный между электродами 34. Теплопередающий слой 35 может быть предусмотрен между текучей средой и остальной частью датчика потока.
Привод (36) предусмотрен для управления компоновкой 30 устройства электроактивного материала для локального подвода тепла к текучей среде 38, поток которой должен быть измерен.
Сигналы от электродов 34 также принимаются контроллером (40), который считывает измерительные сигналы от компоновки 30 устройства электроактивного материала. Измерительные сигналы относятся к температуре на устройстве электроактивного материала. То, каким образом температура может быть измерена посредством компоновки 30 устройства электроактивного материала, будет дополнительно рассмотрено ниже.
Блок 42 обработки сигналов (который может рассматриваться как компонент контроллера (40)) обрабатывает измерительные сигналы для получения результата измерения потока. Изменения электрического состояния компоновки 30, которые зависят от температуры, откалиброваны как функция от скорости потока. Таким образом, датчик базируется на принципе, состоящем в том, что скорость потока влияет на отвод тепла от датчика.
Оптимальное выделение тепла слоем 32 электроактивного материала обеспечивается при использовании электроактивного полимера с довольно высоким уровнем потерь энергии, например, терполимера на основе поливинилиденфторида (PVDF) и его возбуждении при его резонансной частоте или при частоте, превышающей его резонансную частоту так, что бóльшая часть электрической подводимой энергии превращается в тепло. Резонанс ЕАР может быть оптимизирован посредством его механической и электрической конфигурации, включая геометрию и конструкцию фиксирующих элементов.
Оптимальный поток тепла от датчика к среде может быть обеспечен двумя разными способами. Во-первых, если охлаждающая способность среды очень высокая, может быть предпочтительным уменьшение коэффициента теплопередачи от слоя электроактивного материала к среде, например, посредством применения теплоизоляционного слоя с тем, чтобы ЕАР мог удерживать достаточное количество тепла для получения температуры, поддающейся измерению, и уменьшения скорости охлаждения для обнаружения различий между разными скоростями охлаждения. Во-вторых, если охлаждающая способность среды очень низкая может быть предпочтительным принятие противоположных мер для оптимизации чувствительности и точности измерений. Таким образом, конструкция теплопередающего слоя 35 учитывает свойства среды и ожидаемые скорости потока.
Теплопередающий слой 35 может также служить в качестве уплотнения для обеспечения возможности работы в текучих средах.
Существуют разные способы регулирования нагрева и измерения температуры для определения скорости потока.
Первый подход основан на определении скорости охлаждения после подвода определенной электрической мощности. При этом обеспечивается функционирование в виде разомкнутой системы, например, пригодной для статических или медленно изменяющихся скоростей потока.
Фиг.4 показывает график зависимости импеданса R от времени для данного подхода к управлению.
Перед началом измерения слой электроактивного материала может быть переведен в электрическое исходное состояние, например, посредством подачи одного или более импульсов возврата в исходное состояние.
Контрольное измерение выполняют для количественной оценки электрического состояния R0 слоя электроактивного материала, соответствующего исходной температуре.
В течение короткого интервала времени (например, 10 секунд) актуатор возбуждается при частоте, равной или превышающей его резонансную частоту, для выделения тепла. Это создает цикл 44 нагрева, в течение которого подается электрическая энергия РЕАР. Этот интервал времени задан таким, чтобы не вызвать перегрева системы или среды, окружающей ей. Например, максимальная температура 45° достаточна для выполнения измерений в кровотоке. В качестве альтернативы слой электроактивного материала может быть нагрет до заданной температуры при использовании регулирования с обратной связью.
Сразу же после этого интервала 44 времени осуществляется мониторинг падения температуры во время цикла 46 охлаждения посредством электрического параметра, который зависит от температуры.
Время, необходимое для достижения снова исходного состояния R0, соответствующего исходной температуре, находится в зависимости от скорости теплопередачи, которая связана со скоростью потока среды. Это время представляет собой продолжительность цикла 46 охлаждения.
При этом формула, полученная посредством калибровки, или справочная таблица может быть использована для преобразования промежутка времени охлаждения в скорость потока.
Второй подход базируется на определении установившейся температуры во время подвода постоянной электрической мощности. Как и в предыдущем случае, обеспечивается функционирование в виде разомкнутой системы, пригодной для статических или медленно изменяющихся скоростей потока.
Фиг.5 показывает график зависимости импеданса R от времени для данного подхода к управлению.
Перед началом измерения, как и в предыдущем случае, слой электроактивного материала может быть переведен в электрическое исходное состояние, например, посредством подачи одного или более импульсов возврата в исходное состояние.
Контрольное измерение выполняют для количественной оценки электрического состояния R0 слоя электроактивного материала, соответствующего исходной температуре.
Затем осуществляют подвод постоянной электрической энергии РЕАР. Установившаяся температура при соответствующем установившемся электрическом параметре RSS зависит от скорости потока. При этом формула, полученная посредством калибровки, или справочная таблица может быть использована для преобразования установившегося электрического параметра в скорость потока.
Третий подход основан для определения подводимой энергии, необходимой для поддержания постоянной температуры. При этом обеспечивается функционирование замкнутой системы управления, которая особенно подходит для изменяющихся скоростей потока.
Фиг.6 показывает график зависимости импеданса R от времени для данного подхода к управлению.
Как и в вышеприведенных примерах, перед началом измерения слой электроактивного материала может быть переведен в электрическое исходное состояние, например, посредством подачи одного или более импульсов возврата в исходное состояние.
Контрольное измерение выполняют для количественной оценки электрического состояния R0 слоя электроактивного материала, соответствующего исходной температуре.
Электрическая энергия РЕАР для нагрева не является постоянной и изменяется за счет использования подхода с замкнутой обратной связью для поддержания постоянного значения RSET электрического параметра. Это целесообразно при изменяющейся скорости потока, если время реакции системы с обратной связью является достаточно малым.
В примере по фиг.6 электрическая мощность/энергия подается в виде последовательности импульсов постоянного напряжения, частота f которых изменяется для поддержания постоянства параметра R.
Фиг.7 показывает альтернативный подход, при котором мощность РЕАР непрерывно регулируют для поддержания постоянства параметра R.
В вышеприведенных примерах имеется один датчик. Альтернативный вариант состоит в использовании калориметрического датчика потока (для медленно изменяющихся потоков), в котором используются три датчика. Одно устройство обеспечивает, нагрев при постоянной электрической мощности, и имеется датчик с каждой стороны для измерения температуры. Вместо этого центральное нагревательное устройство может обеспечивать профиль нагрева в виде синусоидальной волны или волны в виде последовательности прямоугольных импульсов. Запаздывание по фазе между температурой нагревателя и элементами датчика определяют для определения локальной скорости потока.
Вышеприведенные примеры показывают, как может выполняться измерение скорости потока при использовании устройства электроактивного материала. Устройство может еще выполнять другие функции, такие как типовые функции измерения давления или приведения в действие, выполняемые актуатором или датчиком из электроактивного материала.
Полная комбинация функций предназначена для обеспечения измерения скорости потока, измерения давления и приведения в действие.
Фиг.8 показывает устройство 80 с электроактивным материалом, сформированное в наконечнике катетера 82 и подвешенное над полостью 84. Устройство может быть предусмотрено аналогичным образом вдоль наконечника или на наконечнике проводника, такого как проводник катетера или проводник для доставки стента. Для измерения потока и давления, как показано на среднем изображении, устройство приводится в действие приводом (36) для подвода тепла и последующего функционирования при множестве частот, как разъяснено ниже, при измерении сопротивления или импеданса посредством контроллера (40). Для приведения в действие, показанной на нижнем изображении, сигнал постоянного тока (или низкочастотный сигнал) подается приводом (36).
Провисание, вызываемое в устройстве 80, зависит от давления, что используется для измерения давления потока. Приведение в действие устройства может быть выполнена для обеспечения изгиба, например, для управления направлением перемещения, сканирования или компенсации перемещения. При этом измерение давления может включать измерение кровяного давления.
Актуатор может возбуждаться посредством сигнала переменного тока, наложенного на сигнал постоянного тока, для одновременного измерения (температуры и при необходимости также давления) и для приведения в действие. Устройство может использоваться для внутрисосудистых устройств и применений.
Хорошо известно, что поток варьируется в поперечном направлении трубки, такой как кровеносный сосуд, — при этом поток будет наименьшим у стенки сосуда и наибольшим в центре. По этой причине для получения репрезентативного результата измерения кровотока крайне предпочтительно знать местоположение датчика потока в сосуде. Может быть принят ряд мер для улучшения измерения, которые включают изменение положения датчика в боковом направлении в поперечном сечении сосуда.
Использование такой приведения в действие, как в компоновке по фиг.8, позволяет регулировать перемещение в боковом направлении посредством подачи сигнала напряжения постоянного тока к устройству электроактивного материала. При этом измерение потока может повторяться в нескольких местах в поперечном сечении сосуда, и наибольшая зарегистрированная скорость охлаждения может «интерпретироваться» как скорость потока крови в сосуде. Может осуществляться непрерывное сканирование датчика в поперечном направлении сосуда (например, с частотой, составляющей приблизительно 1 Гц) во время измерения. Таким образом получают скорость потока, усредненную по поперечному сечению сосуда, которая является характеристической для сосуда. В частности, когда требуются только изменения скорости потока вдоль сосуда (вместо абсолютных скоростей), может быть особенно предпочтительным применение подхода с непрерывным сканированием.
Далее будет описано то, каким образом из измерительных сигналов может быть получен результат измерения температуры.
Измеряемый параметр представляет собой импеданс датчика с электроактивным материалом, и импеданс может быть измерен, в частности, по меньшей мере, при первой и второй разных частотах. Из этих результатов измерений могут быть определены температура на датчике, а также (при желании) внешнее давление или внешняя сила, приложенное (-ая) к датчику. Таким образом, датчик может использоваться в качестве датчика давления и в качестве датчика температуры.
На фиг.9 показана схематическая иллюстрация простой первой компоновки устройства с актуатором и датчиком температуры.
Как и в предыдущем случае, актуатор с электроактивным материалом содержит слой 32 электроактивного материала, размещенный на нижнем несущем слое 90, и электрически соединен посредством элемента 42 для обработки сигналов со средством 92 ввода первого управляющего сигнала (сигнала постоянного тока) и средством 94 ввода второго управляющего сигнала (сигнала переменного тока). Средство 92 ввода первого управляющего сигнала предназначено для подачи возбуждающего сигнала приведения в действие (сравнительно) высокой мощности. Средство 34 ввода второго сигнала предназначено для подачи измерительного сигнала переменного тока (сравнительно) низкой мощности и, в частности, при двух разных частотах, как будет рассмотрено ниже.
Элемент 42 для обработки сигналов обеспечивает наложение первого и второго управляющих сигналов друг на друга для формирования третьего комбинированного управляющего сигнала, который затем подается на устройство.
Элемент для обработки сигналов может в примерах содержать ряд составляющих элементов для выполнения, например, функций анализа сигналов, функций соединения и развязки сигналов и/или функций генерирования сигналов. В последнем случае средства 92 и 94 ввода первого и второго управляющих сигналов могут быть заключены в самом блоке 42 обработки, который содержит элементы для генерирования сигналов переменного тока и/или постоянного тока и в некоторых случаях элементы для анализа электрических параметров одного или обоих сигналов.
Электрические соединения компоновки на фиг.9 показаны соединенными с электродами на верхней и нижней плоских поверхностях слоя электроактивного материала. Для этого могут быть использованы гибкие компоновки электродов. Подача напряжений постоянного тока и/или переменного тока к электродам создает возможность генерирования электрического поля в слое электроактивного материала, которое вызывает соответствующую деформацию.
Несмотря на то, что средство 92 ввода первого управляющего сигнала в компоновке по фиг.9 содержит средство ввода сигнала постоянного тока, в альтернативных компоновках это средство ввода может содержать средство ввода возбуждающего сигнала переменного тока. В любом из двух случаев относительная мощность возбуждающего сигнала приведения в действие значительно превышает мощность поданного измерительного сигнала. В случае, когда оба сигнала представляют собой сигналы переменного тока, максимальная амплитуда измерительного сигнала (поданного в средстве 94) может составлять менее 10% от максимальной амплитуды возбуждающего сигнала приведения в действие (поданного в средстве 92), например, может составлять менее 1% от максимальной амплитуды возбуждающего сигнала приведения в действие. В случае, когда измерительный сигнал представляет собой сигнал переменного тока и сигнал возбуждения представляет собой сигнал напряжения смещения постоянного тока с фиксированной амплитудой, максимальная амплитуда сигнала переменного тока может составлять менее 10% от фиксированной амплитуды сигнала напряжения смещения постоянного тока, например, может составлять менее 1% от фиксированной амплитуды сигнала напряжения смещения постоянного тока.
Для примера по фиг.9 третий комбинированный сигнал, генерированный элементом 42 для обработки сигналов, содержит высокочастотный, низкоамплитудный сигнал переменного тока, наложенный на высокоамплитудный сигнал напряжения смещения постоянного тока.
Как описано в предыдущих разделах, приложение напряжения смещения постоянного тока с достаточной амплитудой к слою электроактивного полимера вызывает расширение полимерного слоя. Если слой соединен с пассивным несущим слоем 90, расширение полимера приводит к деформации, например, к изгибанию или выгибанию всей структуры, что может быть использовано для получения воздействующей силы. На фиг.9 структура актуатора показана в «активном» или «возбужденном» состоянии, в котором было приложено напряжение смещение постоянного тока с величиной, достаточной для обеспечения деформирования структуры. Как хорошо известно, степень расширения варьируется в зависимости от интенсивности электрического поля/величины электрического тока, приложенного/поданного к устройству. Следовательно, при изменении амплитуды напряжения смещения постоянного тока может быть индуцирована деформация с разными степенями/величинами, и могут быть получены различающиеся величины воздействующих приложенных сил (или, например, различающееся количество работы при приведении в действие).
Высокочастотный сигнал переменного тока, наложенный на напряжение смещения постоянного тока, также вызывает реакцию в материале в виде механической деформации, но деформационный отклик, который является периодическим, а не фиксированным (то есть колебание). Тем не менее, поскольку максимальная амплитуда высокочастотного сигнала значительно меньше амплитуды сигнала напряжения смещения постоянного тока (например, на два порядка величины меньше амплитуды сигнала напряжения смещения постоянного тока, например, составляет 1% от амплитуды сигнала постоянного тока), соответствующая амплитуда смещения при индуцированной деформации фактически является пренебрежимо малой по сравнению со смещением, вызванным основным возбуждением. Следовательно, наложение измерительного сигнала не влияет на точность и стабильность приведения в действие.
Наложение низкоамплитудного колебательного сигнала на напряжение смещения постоянного тока позволяет включить механизм электрической обратной связи в сам механизм основного возбуждения актуатора. При некоторых частотах, в частности, при частотах, которые соответствуют частоте механического резонанса или являются гармоническими по отношению к частоте механического резонанса структуры актуатора, в материале актуатора создается малая механическая стоячая волна. Это, в свою очередь, влияет на электрические характеристики материала. Когда измерительный сигнал генерируется при резонансной частоте материала, соответствующее импеданс материала будет более низким (по сравнению с возбуждением материала при нерезонансной частоте) вследствие того, что механические колебания совпадают по фазе с электрическим сигналом возбуждения.
Частота механического резонанса структуры представляет собой частоту, при которой структура будет стремиться к собственным колебаниям при ее смещении из ее состояния равновесия, и определяется внутренними конструктивными характеристиками структуры (например, геометрией, размером, формой, толщиной и т.д.). Механические колебания структуры из ЭАП необязательно будут соответствовать частоте электрического управляющего сигнала, поданного к ней, но будут стремиться вернуться обратно к ее собственной резонансной частоте, при этом частота возбуждения влияет на данные колебания или конструктивно, или деструктивно в зависимости от того, в какой степени частота возбуждения или не совпадает по фазе, или совпадает по фазе с частотой собственных колебаний (резонансной частотой).
Когда высокочастотный сигнал генерируется с антирезонансной частотой структуры из электроактивного материала (то есть с частотой первой гармоники резонансной частоты), импеданс электроактивного материала будет более высоким вследствие того, что механические колебания материала не совпадают по фазе с колебательным сигналом возбуждения (электрические индуцируемые механические деформации не совпадают по фазе с электрическим возбуждением). Другими словами, например, всякий раз при подаче положительного тока к электроактивному материалу посредством управляющего сигнала не совпадающие по фазе, механические деформации одновременно вызывают ток в противоположном направлении (то есть, имеет место поведение при отсутствии синфазности). В идеальном (модельном) случае эти противоположные токи взаимно уничтожаются, и никакой ток вообще не может течь (то есть имеет место бесконечный импеданс), но в реальных ситуациях не происходит полного уничтожения, и этот эффект проявляется в виде (фактического) более высокого сопротивления электрическому току (то есть более высокого импеданса). В частности, когда сигнал генерируется при антирезонансной частоте материала актуатора, импеданс электроактивного материала имеет максимальную величину.
Дополнительное понимание данной зависимости может быть обеспечено при рассмотрении нижеприведенного уравнения (1). Импеданс идеального электроактивного материала при резонансе и антирезонансе зависит от конкретного типа или вида деформации. Наиболее распространен перевод электроактивного материала в изгибный резонанс (например, по длине или ширине). Импеданс определяется диэлектрическими свойствами материала и электромеханической связью, и электрическими и механическими потерями. Для упрощения при игнорировании электрических и механических потерь для слоя электроактивного материала с длиной l, шириной w и толщиной t, деформирующегося в боковом направлении, импеданс задано выражением:
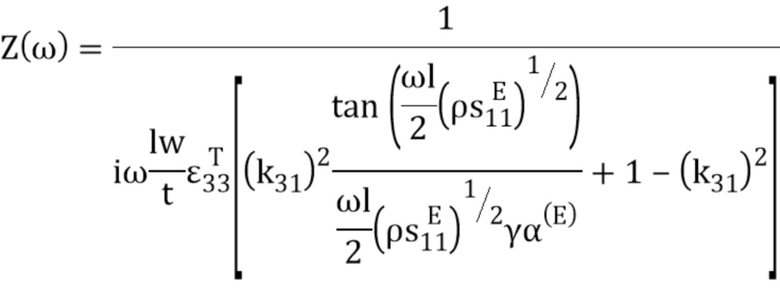
где εT33 – диэлектрическая постоянная, k31 — коэффициент электромеханической связи в боковом направлении, ρ — плотность ЭАП, и sE11 — коэффициент податливости в боковом направлении. При антирезонансной частоте ωa, 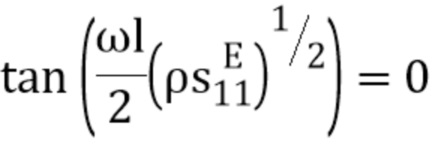 и Z имеет наибольшее значение.
и Z имеет наибольшее значение.
Реальный электроактивный материал имеет потери и может быть смоделирован или представлен в виде соединенных последовательно конденсатора и резистора, сопротивление которых является наибольшим при антирезонансной частоте. Следовательно, в нижеприведенных описаниях термины «полное сопротивление» и «последовательное сопротивление» (Rs) могут использоваться как взаимозаменяемые применительно к устройству. Однако в данном контексте последовательное сопротивление следует понимать, как относящееся просто к модели, в которой актуатор/датчик представлен электронными средствами в виде конденсатора, последовательно соединенного с резистором, имеющим сопротивление Rs.
Из-за вышеописанной взаимосвязи между импедансом и резонансом, при генерировании управляющего сигнала при антирезонансной частоте любые возникающие отклонения его частоты от антирезонансной можно будет обнаружить за счет соответствующего резкого падения, поддающегося измерению, импеданса структуры из ЭАП. Именно этот физический эффект обеспечивает возможность выполнения механических измерений.
Приложение нагрузки (то есть давления или силы) к структуре приводит к демпфированию любых резонансных эффектов, которые возникают в материале. Если сигнал возбуждения является колебательным с частотой, соответствующей антирезонансной или резонансной частоте материала, при приложении нагрузки, демпфирующий эффект можно будет идентифицировать при измерениях импеданса ЭАП (то есть последовательного сопротивления Rs) в реальном времени, поскольку внезапное прекращение резонанса будет вызывать обусловленное этим, резкое уменьшение импеданса. Следовательно, при мониторинге импеданса структуры в течение некоторого времени, когда актуатор функционирует (например, при мониторинге напряжения и тока высокочастотного сигнала в течение некоторого времени), могут быть обнаружены и в некоторых случаях количественно определены (как будет описано ниже) давления и нагрузки, приложенные к структуре.
Связь между импедансом, с одной стороны, и разностью фаз между частотой электрического управляющего сигнала и частотой механических колебаний материала, с другой, позволяет выполнить высокочувствительное определение механических сил, приложенных к ЭАП, посредством мониторинга только электрических характеристик управляющего сигнала. Следовательно, это обеспечивает очень простое, понятное и эффективное средство обеспечения одновременных приведения в действие и измерения при использовании одного устройства с ЭАП. Кроме того, варианты осуществления создают возможность одновременных измерения и приведения в действие в одной и той же зоне структуры из ЭАП (то есть пространственно одновременных измерения и приведения в действие). Это означает, что устройство, выполняющее обе функции, может быть выполнено со значительно меньшим форм-фактором без снижения, например, чувствительности или разрешения при измерении. Кроме того, для устройства требуется выполнить только один комплект соединений (в отличие от двух или более комплектов соединения, по одному для каждой специально предусмотренной зоны измерения или приведения в действие), что является предпочтительным с точки зрения затрат и уменьшенной сложности и в случаях, когда требуются, например, водонепроницаемые соединения (например, в устройствах для бритья/катетерах/устройствах для обеспечения здорового состояния полости рта) и/или когда должно быть создано упорядоченное множество актуаторов/датчиков.
При соответствующем выборе измерительных сигналов и при соответствующей обработке сигналов может быть обеспечено измерение температуры, а также измерение нагрузки, результаты которых затем используются для получения информации о скорости потока разъясненным выше способом.
В частности, генерируются измерительные сигналы, по меньшей мере, с первой и второй разными частотами, и элемент 42 для обработки сигналов используется для определения одной или более электрических характеристик актуатора 30 при двух частотах измерений. Таким образом, могут быть определены как температура актуатора, так и внешнее давление или внешняя сила, приложенное (-ая) к актуатору.
Если необходима только информация о температуре (которая затем используется для получения информации о скорости потока), то, само собой разумеется, вычисления сил не требуются. Однако использование двух частот измерений позволяет устранить взаимное влияние температурных эффектов и воздействий внешних сил.
Частота каждого из высокочастотных измерительных сигналов, как правило, может находиться в диапазоне от 1 кГц до 1 МГц в зависимости от конкретной геометрии актуатора. Следует отметить, что в случае, когда сигнал возбуждения актуатора представляет собой возбуждающий сигнал переменного тока, частота этого сигнала значительно ниже частоты изменяющегося измерительного сигнала. (Низкочастотное) напряжение приведения в действие в этом случае может быть, например, по меньшей мере, на два порядка величины меньше, чем напряжение высокочастотного сигнала для избежания интерференции сигнала приведения в действие и измерительного сигнала.
Как разъяснено выше, при антирезонансной частоте измеренное импеданс является более высоким вследствие не совпадающих по фазе, механических колебаний. В частности, последовательное сопротивление (Rs) актуатора при данной частоте находится на локальном максимуме. В одном варианте осуществления эта частота используется в качестве первой из частот измерений. Определяют другую частоту измерения, которая находится за пределами диапазона частот электромеханической связи, и она используется в качестве второй частоты измерения.
Процесс калибровки может быть использован для определения частот, подлежащих использованию, и для определения взаимосвязи между измеренным сопротивлением и приложенной нагрузкой при указанной определенной резонансной частоте. Фиг.10 показывает один пример.
Первое качание 100 частоты выполняют при приложенном напряжении смещения постоянного тока, составляющем 0 В, и измеряют реакции сопротивления. Посредством этого определяют эквивалентное последовательное сопротивление актуатора при разных частотах для получения функциональной зависимости импеданса от частоты при отсутствии сигнала приведения в действие.
Затем на шаге 102 подают фиксированный сигнал напряжения смещения постоянного тока, предпочтительно соответствующий заданному состоянию приведения в действие устройства. При этом может отсутствовать какая-либо нагрузка, приложенная к устройству.
После этого на шаге 104 выполняют второе качание частоты при фиксированном ненулевом напряжении смещения постоянного тока и регистрируют соответствующие значения сопротивления. Эквивалентное последовательное сопротивление актуатора снова определяют при разных частотах для получения функциональной зависимости импеданса от частоты при наличии сигнала приведения в действие.
Результаты двух качаний затем сравнивают на шаге 106 для определения различия в полученных значениях сопротивления для каждой частоты в диапазоне частот.
На шаге 108 определяют первую частоту, при которой значения измеренного сопротивления различаются на наибольшую величину, и посредством этого непосредственно идентифицируют антирезонансную частоту.
На шаге 110 определяют вторую частоту измерений. Это частота, при которое данное различие пренебрежимо мало. Следовательно, это частота, при которой электрическая характеристика является постоянной по отношению к нагрузке.
Следует отметить, что шаги 100-110 могут быть в некоторых случаях повторены для такого количества напряжений постоянного тока, какое желательно, например, для сбора данных, относящихся к множеству разных положений при приведении в действие, в случае, когда переменная степень приведения в действие должна быть использована при функционировании устройства.
Для устройства, представляющего собой только датчик, будет иметь место одно приведение в действие, которое обеспечивает перевод датчика в активированное состояние, в котором он готов к выполнению измерений. Таким образом, требуется только одна управляемая калибровка.
Датчик может быть, например, выставлен в заданное положение и использован впоследствии только в качестве датчика. Это может рассматриваться как соответствующее одному уровню приведения в действие, используемому для выполнения множества измерений. Функция измерения может использоваться при напряжении смещения постоянного тока, находящемся в определенном диапазоне. Однако этот диапазон может включать напряжения смещения постоянного тока, при которых отсутствует физическое возбуждение, но, тем не менее, имеется чувствительность к приложенной нагрузке. В частности, кривая возбуждения/приведения в действие (зависимость возбуждения/приведения в действие от приложенного напряжения) является нелинейной при пороговом напряжении, ниже которого физическое возбуждение не начинается. В этом случае обеспечивается возможность выполнения функции измерения даже без физической деформации, хотя измеренный сигнал будет меньше, чем при большем напряжении смещения постоянного тока.
Фиг.11 показывает график интенсивности сигнала для измерения фиксированной нагрузки при различных напряжениях приведения в действие в виде графика 113. График 114 показывает уровень приведения в действие для данных напряжений приведения в действие (с произвольным масштабом). Можно видеть, что чувствительность увеличивается быстрее, чем приведение в действие для напряжений, увеличивающихся от исходного нулевого уровня.
Типовой диапазон напряжения смещения постоянного тока, предназначенный только для измерения, может, например, представлять собой диапазон от 40 В до 50 В или от 40 до 75 В, при этом чувствительность превышает нулевую, но приведение в действие по-прежнему является нулевым или близким к нулю (соответственно).
На шаге 112 по фиг.10 получают калибровочные данные для значения напряжения в виде зависимости последовательного сопротивления устройства от приложенной нагрузки для фиксированного напряжения смещения постоянного тока и фиксированной частоты сигнала переменного тока — равной антирезонансной первой частоте.
Кроме того, значение импеданса получают для каждой температуры в диапазоне, представляющем интерес, и для каждого возможного сигнала приведения в действие. При второй частоте значение импеданса получают для каждой температуры в диапазоне, представляющем интерес, для каждого возможного сигнала приведения в действие и для каждой возможной нагрузки.
Таким образом, на шаге 112 выполняется множество измерений при разных температурах и при разной приложенной нагрузке. Этот процесс калибровки происходит на предприятии, и создается справочная таблица для Rs при частоте 1 и частоте 2 для переменных приложенной нагрузки и температуры. При каждой температуре измеряют полный диапазон нагрузок. Эту справочную таблицу используют в качестве базы во время применения.
Таким образом осуществляют калибровку актуатора для получения зависимости импеданса от нагрузки для каждого приложенного напряжения (если имеется множество приложенных напряжений) и при каждом значении температуры в пределах интервала температур.
Во время приведения в действие значение измеренного импеданса при первой частоте в сочетании с приложенным напряжением служит показателем силы, приложенной к актуатору, и значение импеданса при второй частоте служит показателем температуры актуатора из электроактивного материала. Амплитуда смещения высокочастотного (измерительного) сигнала является пренебрежимо малой по сравнению со смещением при приведении в действие, так что оно не будет влиять на точность или стабильность приведения в действие.
Как ясно из вышеприведенного рассмотрения, актюация является возможной, но необязательной.
Фиг.12 показывает способ, который используется во время применения актуатора. Получают калибровочные данные, как показано стрелкой 120. Шаг 122 предусматривает измерение импеданса при первой частоте, полученной при калибровке. Это используется для измерения нагрузки (то есть давления или силы). Этап 124 предусматривает измерение импеданса при второй частоте, полученной при калибровке. Это используется для измерения температуры.
Во время этих измерений сигнал приведения в действие с большей амплитудой подается на шаге 126. Он будет постоянным для функционирования только в качестве датчика, или он будет переменным для датчика и актуатора. Шаг 128 предусматривает определение нагрузки на актуаторе и температуры.
Эти два параметра могут быть получены в виде отдельных выходных сигналов из системы. В альтернативном варианте данные по температуре могут использоваться внутри системы для обеспечения компенсации влияния температуры на измеренную нагрузку.
Первый пример будет описан более подробно на основе возбуждающего сигнала постоянного тока, как показано на фиг.13.
Как разъяснено выше, актуатор с ЭАП имеет слой 32 электроактивного материала (например, ЭАП) и пассивный несущий слой 90 и удерживается в корпусе 132, и электрически соединен с механизмом 134 управления сигналами. Механизм управления в примере по фиг.13 содержит как элементы для генерирования сигналов (управляющие элементы), так и элементы для обработки и анализа сигналов (чувствительные элементы).
Элемент 135 для управления актуатором генерирует высокоамплитудный сигнал возбуждения актуатора (например, фиксированное напряжение смещения постоянного тока), который передается в устройство 136 усиления сигнала. Элемент 138 для управления датчиком содержит как задающий элемент 140 для генерирования измерительных сигналов, так и обрабатывающий элемент 142 для анализа электрических характеристик измерительных сигналов после прохождения через актуатор. Для этого механизм 134 управления дополнительно содержит вольтметр 144, подсоединенный параллельно актуатору с ЭАП, и амперметр 146, подсоединенный последовательно между выходной клеммой 148 актуатора и элементом 138 для управления датчиком. Как вольтметр 134, так и амперметр 136 соединены с элементом 138 для управления датчиком с возможностью передачи сигнала, так что данные, генерируемые ими, могут быть использованы процессором 142 для определения импеданса актуатора (то есть эквивалентного последовательного сопротивления Rs, когда устройство смоделировано в виде идеального конденсатора, последовательно соединенного с резистором, то есть активной составляющей комплексного импеданса).
Управляющие сигналы, генерируемые элементом 135 для управления актуатором и элементом 138 для управления датчиком, накладываются друг на друга усилительным элементом 136 или до их совместного усиления, или после их независимого усиления. В некоторых примерах усилительный элемент 136 может быть заменен просто объединителем. В этом случае элемент 135 для управления актуатором и элемент 138 для управления датчиком могут быть выполнены с возможностью локального усиления генерируемых ими, возбуждающего и измерительного сигналов перед выдачей их в объединитель.
Комбинированный сигнал возбуждения затем передается к входной клемме 149 актуатора с ЭАП. Высокоамплитудная составляющая комбинированного управляющего сигнала, обусловленная сигналом постоянного тока, вызывает деформационный отклик в актуаторе.
Для получения наиболее повторяющихся (то есть надежных/точных) результатов ЭАП может быть зажат в заданном положении. Например, актуатор может быть зажат в корпусе 132, и корпус затем может быть размещен так, чтобы обеспечить выставление устройства с заданной зоной приведения в действие.
Низкоамплитудная составляющая управляющего сигнала, обусловленная сигналом переменного тока, вызывает низкоамплитудный периодический отклик в слое 32 ЭАП, например, колебания структуры при ее резонансной или антирезонансной частоте.
Напряжение комбинированного управляющего сигнала и результирующий ток подаются к элементу 138 для управления датчиком. Переменные токи, как правило, могут иметь величину в пределах от 0,1 мА до 1 мА, но могут составлять вплоть до 10 мА. Бóльшие токи могут вызвать слишком большой нагрев.
В некоторых случаях механизм 134 управления может дополнительно содержать один или более элементов для развязки сигналов, например, фильтр пропускания высоких частот, для изоляции высокочастотных составляющих для анализа обрабатывающим элементом 142 элемента 138 для управления датчиком.
Обрабатывающий элемент 142 элемента 138 для управления датчиком может использовать результаты измерений, выполненных вольтметром 144 и амперметром 146, для определения последовательного сопротивления актуатора, на который воздействует (-ют) поданный (-е) сигнал (-ы) возбуждения. Последовательное сопротивление может определяться в реальном времени и отслеживаться, например, для обнаружения внезапных изменений сопротивления, которые, как разъяснено выше, могут использоваться для индикации наличия и величины нагрузок и давлений, приложенных к актуатору.
Актуатор с ЭАП имеет схему, приблизительно эквивалентную последовательно соединенным конденсатору Cs и резистору Rs, как показано на фиг.14.
Качание, разъясненное выше, которое используется для определения антирезонансной частоты (точки наивысшей чувствительности), показано на фиг.15.
Измеренное последовательное сопротивление (в Омах) показано на одной оси y, измеренная емкость (в Фарадах) показана на другой оси y, и частота измерительного сигнала (в Гц) показана на оси x.
График 152 представляет собой зависимость сопротивления, и график 154 представляет собой зависимость емкости. Для этого примера частота, составляющая приблизительно 29,8 кГц, определена как антирезонансная частота вследствие локального пика сопротивления, показанного ссылочной позицией 155. Частота, «удаленная» от данной точки, выбрана в качестве второй частоты, например, в точке 156 и составляет 20 кГц. Графики приведены для напряжения смещения, составляющего 200 В.
Как разъяснено выше, пики наиболее легко определяются при сравнении графиков. Фиг.16 показывает результаты измерений сопротивления для качания частоты при 0 В в виде графика 160 (который не показывает никакого отклонения относительно первичной кривой, которая отражает просто емкостную функцию комплексного импеданса) при изменении частоты переменного тока. При напряжении смещения, составляющем 0 В, имеется малая связь или связь отсутствует, и, следовательно, имеется нулевой (или не поддающийся измерению, малый) деформационный отклик в материале на сигнал переменного тока. Следовательно, качание частоты при напряжении смещения, составляющем 0 В, обеспечивает удобное базовое значение, с которым сравнивают результаты при качании частоты переменного тока при большем (вызывающем приведение в действие) напряжении постоянного тока. График 160 соответствует качанию частоты при приложенном напряжении смещения постоянного тока.
Антирезонансная частота устройства может быть определена посредством обнаружения частоты переменного тока, при которой разность значений измеренного сопротивления при двух напряжениях постоянного тока является наибольшей.
На фиг.17 более четко проиллюстрировано различие между двумя кривыми сигналов, при этом разница в измеренном сопротивлении показана на оси y и соответствующая частота измерительного сигнала — на оси х. Два бóльших скачка сопротивления четко видны на этом графике, при этом больший из двух представляет собой скачок, возникающий при антирезонансе.
Несмотря на то, что напряжение смещения постоянного тока, составляющее 0 В, используется для первого качания частоты в этом примере, в альтернативных примерах может быть использовано другое (ненулевое) первое напряжение смещения. В этом случае в зависимости от величины первого напряжения первое качание частоты может обеспечить индикацию изменений или пиков относительно центральной кривой. Однако антирезонансная частота по-прежнему может быть обнаружена посредством идентификации частоты, при которой разность значений сопротивления, измеренного при двух напряжениях постоянного тока, является наибольшей.
Нагрузка также оказывает влияние на последовательное сопротивление актуатора за счет демпфирования резонансного-антирезонансного поведения. Это показано на фиг.18, на которой показаны графики зависимости сопротивления Rs при антирезонансе, измеренного на актуаторе при напряжении смещения, составляющем 200 В, от нагрузки. Каждый график построен при температуре, отличной от других, и видно постепенное изменение при изменении температуры.
При второй частоте (вне диапазона резонансной связи) отсутствует влияние электромеханической связи. При этой частоте сопротивление зависит только от температуры, как показано на фиг.19, на которой показаны графики зависимости сопротивления от нагрузки. Сопротивление показано при нерезонансной частоте (20 кГц) и также измерено для актуатора при напряжении смещения, составляющем 200 В.
Видно постепенное изменение при изменении температуры, но отсутствует влияние приложенной нагрузки. Как показано на фиг.20, сигнал температуры является повторяющимся, поскольку на фиг.20 показаны графики зависимости сопротивления от температуры при нулевой нагрузке для двух испытаний.
Как разъяснено выше, зависимость температуры от сигнала используется для получения информации о скорости потока.
Сигнал температуры также может быть использован для компенсации сигнала приведения в действие для повышения точности датчика нагрузки. На фиг.21 скомпенсированное значение сопротивления в зависимости от нагрузки приведено для 8 разных температур от 23 до 45 градусов. Среднее различие между 23 градусами и 45 градусами составляет теперь 3,8% вместо 29% для нескомпенсированного результата измерения.
Вышеприведенный пример базируется на возбуждающем сигнале постоянного тока. Во втором примере имеется возбуждающий сигнал переменного тока низкой частоты. При приведении в действие переменным током низкой частоты актуатор имеет электрическую нагрузку, создаваемую напряжением переменного тока низкой частоты и напряжением переменного тока высокой частоты, образующим малый сигнал. Напряжение высокой частоты и малой амплитуды используется для измерений и накладывается на возбуждающий сигнал переменного тока низкой частоты. Напряжение приведения в действие, представляющее собой напряжение переменного тока низкой частоты, вызывает деформацию в ЭАП, которая может быть использована для приведения в действие.
Напряжение приведения в действие, представляющее собой напряжение низкой частоты, предпочтительно имеет частоту, которая, по меньшей мере, на 2 порядка величины (то есть <1%) меньше, чем у высокочастотного сигнала, для избежания интерференции сигнала приведения в действие и измерительного сигнала.
В третьем примере частотное сканирование не требуется для калибровки системы. Это позволяет уменьшить сложность и стоимость системы. Однако робастность и чувствительность по-прежнему могут обеспечиваться. При изготовлении будет жестко контролироваться (анти)резонансная частота (fr) актуатора, так что заданный набор из 2 частот для значения температуры в пределах интервала температур будет известен заранее, таким образом, результаты измерений при данных двух заданных частотах всегда будут характеризовать нагрузку на актуатор (при частоте 1) и температуру (при частоте 2).
В четвертом примере может быть предусмотрено измерительное устройство или воздействующее и измерительное устройство, содержащее множество устройств согласно вышеописанным примерам, расположенных, например, в виде решетки или с другой желательной компоновкой/формой. В примерах множество устройств могут быть выполнены так, что каждое из них будет иметь отличную от других частоту fr механического резонанса. Таким образом, при подаче высокочастотных измерительных сигналов к решетке устройств характеристическая (отличная от других) резонансная частота каждого устройства может быть использована для определения того, какой актуатор в решетке приводится в действие в качестве датчика, то есть для задания положения датчика/актуатора в решетке.
Например, общий сигнал возбуждения может быть подан ко всем устройствам в решетке, при этом общий сигнал содержит последовательный ряд сигналов разных частот (то есть известных резонансных — или антирезонансных — частот устройств). Если качание частот во времени более быстрое, чем входной сигнал датчика, то соответствующее уменьшение (или увеличение) импеданса может быть обнаружено для устройств только при той частоте, которая соответствует конкретному устройству, которое возбуждается, то есть измеряемый импеданс будет уменьшаться, когда частота достигает значения fr, соответствующего возбуждаемому устройству, и затем снова увеличиваться (или наоборот) при смещении частоты от fr. В такой системе fr (или Rs) может использоваться для идентификации того, какой актуатор используется в качестве датчика, то есть для задания положения датчика/актуатора в решетке.
В вышеприведенном примере результат измерения импеданса используется для определения приложенной нагрузки. Вместо определения (изменения) последовательного сопротивления может быть обнаружено изменение антирезонансной частоты для получения соответствующего сигнала обратной связи.
В альтернативном варианте вместо определения (изменения) последовательного сопротивления (или изменения антирезонансной частоты) может быть определено изменение фазы, в частности, фазового угла комплексного импеданса. Изменение последовательного сопротивления Rs является сравнительно малым. Для повышения чувствительности оно может быть объединено с другой зависимой переменной.
На фиг.22 изменение Rs показано слева и изменение Cs и Rs показано справа.
Правое изображение показывает, как фазовый угол комплексного импеданса изменяется на величину (Δρ) увеличения в качестве реакции на уменьшение активной составляющей импеданса и увеличение реактивной составляющей импеданса. Фаза может быть определена посредством измерения изменения фазы между током и напряжением. В частности, если ЭАП имеют тонкие слои, эффект от изменений реактивной части импеданса (jXcs) может стать преобладающим. Действительно, любые результаты измерений, связанные с комплексным импедансом, могут быть использованы для определения нагружения актуатора.
Чувствительность измерений температуры может быть настроена посредством соответствующего выбора состава используемых полимеров (актуатора/датчика с ЭАП). Состав может быть отрегулирован для получения наибольшей чувствительности датчика к заданной рабочей температуре.
Например, в полимерном материале (PVDF-TrFE-CTFE — поливинилиденфторид-трифторэтилен-хлортрифторэтилен) это может быть обеспечено посредством изменения содержания CTFE.
Фиг.23 показывает зависимость чувствительности иллюстративного материала (PVDF-TrFE-CTFE) с определенным составом от температуры, и она показывает максимальную чувствительность при 26 градусах Цельсия. Иллюстративный материал имеет содержание CTFE, составляющее 10%.
Фиг.24 показывает зависимость между соответствующей рабочей температурой и содержанием CTFE в полимере (PVDF-TrFE-CTFE) и показывает температуру, при которой чувствительность к температуре является самой высокой, в зависимости от процентного содержания CTFE. Как показано, более высокое содержание CTFE приводит к уменьшенной температуре, при которой чувствительность является самой высокой. Например, полимер с 7% CTFE может быть использован для применений внутри тела, где температура является более высокой, чем температура внутри помещения, в котором функционирует датчик, работающий в помещении.
Электроактивный материал (например, ЭАП) используется в качестве нагревателя в устройстве, описанном выше. Далее будет показано, что может быть обеспечен достаточный нагрев. Рассматриваются два состояния: состояние при неподвижном воздухе (с низкой охлаждающей способностью) и состояние при циркулирующей крови (с большой охлаждающей способностью). Заданное увеличение температуры составляет, например, 5°С.
Известно, что актуатор с ЭАП легко нагревается при неподвижном воздухе. При возбуждении при сравнительно низких частотах (1-50 Гц) и высоких напряжениях (150-200 В) увеличение температуры актуатора может составлять более 10°С в течение нескольких секунд, как показано на фиг.25. Фиг.5 показывает график зависимости максимальной температуры поверхности ЭАП (ось y) при неподвижном воздухе от частоты возбуждения (ось x), при этом температура измерена инфракрасной камерой. Максимальные температуры достигаются в течение не более 10 секунд.
Базовые уравнения для тепловыделения и конвективной теплопередачи могут быть использованы для оценки коэффициента теплопередачи в воздухе посредством использования вышеуказанных результатов измерений. Конвективная передача тепла от тела к среде описывается выражением:
Q = h ⋅ A ⋅ (Teap – Tflow) (1)
где Q — тепловой поток (Дж/с), h — коэффициент теплопередачи системы (Дж/м2сК), А — площадь (м2) и Teap и Tflow — температуры (в градусах Цельсия или Кельвина) ЭАП и среды. Тепло, выделяющееся вследствие диэлектрических потерь в электроактивном полимерном материале, может быть оценено посредством выражения:
P = tanδ ⋅ f ⋅ C ⋅ Upp (2)
где Р — выделенное тепло (Дж/с), tanδ — коэффициент диэлектрических потерь (безразмерный), f — рабочая частота (Гц), С – емкость (Фарад) и Upp — размах напряжения возбуждения (В). В установившемся режиме (после периода первоначального нагрева) выделяющееся тепло Р будет равно передаваемому теплу Q:
P = Q (3)
Подстановка (1) и (2) в (3) приводит к следующей оценке температуры ЭАП:
Из уравнения (4) следует, что увеличение температуры (Teap – Tflow) происходит линейно при изменении частоты возбуждения. При адаптации уравнения (4) к результатам измерений на фиг.25 коэффициент теплопередачи в неподвижном воздухе в конкретном эксперименте оценивается как h = 53 Вт/м2К при использовании tanδ = 0,1, А = 1,5 см2 и С = 1 мкФ. Расчетное значение h = 53 Вт/м2К находится в пределах диапазона типовых значений коэффициентов теплопередачи в неподвижном воздухе, 10 – 100 Вт/м2К.
Значение h = 53 и уравнение (4) используются для оценки нагрева ЭАП при высоких частотах и низком напряжении. Фиг.26 показывает расчетное увеличение Teap – Tflow температуры ЭАП в зависимости от частоты при низком напряжении на основе значения h = 53. Фиг.25 и 26 показывают, что можно будет обнаружить рабочие точки при низкой и высокой частотах (предпочтительных).
Коэффициенты конвективной теплопередачи для процессов абляции, приведенные в литературе, охватывают широкий диапазон, например, 80—3500 Вт/м2К. Эти значения характеризуют передачу тепла от ткани к циркулирующей крови.
Фиг.27 показывает расчетное увеличение Teap – Tflow температуры актуатора на основе предполагаемого значения h = 1000 Вт/м2К (характеризующего функционирование в крови). Размах напряжения возбуждения составляет соответственно 100 В и 10 В. Предел возбуждения актуатора без повреждения соответствует, например, частоте 1 кГц при 200 В в сухом состоянии. При значениях выше этого предела актуатор начинает быстро разрушаться. Из исходных вычислений можно видеть, что действительно можно обнаружить рабочую точку характеристики в крови.
В случае (многослойного) устройства электроактивного материала емкость пропорциональна площади, так что согласно уравнению (4) можно уменьшить размеры актуатора без воздействия на Teap – Tflow (в качестве первого приближения).
Известны материалы, пригодные для слоя из ЭАП. Электроактивные полимеры включают, среди прочего, следующие подклассы: пьезоэлектрические полимеры, электромеханические полимеры, релаксорные ферроэлектрические полимеры, электрострикционные полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры, сопряженные полимеры, композиты из ионных полимеров и металлов, ионные гели и полимерные гели.
Подкласс электрострикционных полимеров включает среди прочего:
поливинилиденфторид (PVDF), поливинилиденфторид-трифторэтилен (PVDF-TrFE), поливинилиденфторид-трифторэтилен-хлорфторэтилен (PVDF-TrFE-CFE), поливинилиденфторид-трифторэтилен-хлортрифторэтилен (PVDF-TrFE-CTFE), поливинилиденфторид-гексафторпропилен (PVDF-HFP), полиуретаны или их смеси.
Подкласс диэлектрических эластомеров включает среди прочего:
акрилаты, полиуретаны, силиконы.
Подкласс сопряженных полимеров включает среди прочего:
полипиррол, поли-3,4-этилендиокситиофен, поли(р-фениленсульфид), полианилины.
Ионные устройства могут базироваться на композитах из ионного полимера и металла (IPMC) или сопряженных полимерах. Композит из ионного полимера и металла (IPMC) представляет собой синтетический композиционный наноматериал, который демонстрирует характеристики искусственной мышцы при приложенном напряжении или электрическом поле.
Более подробно, композиты из ионного полимера и металла состоят из ионного полимера, подобного Nafion или Flemion, на поверхности которого химическим или физическим способом нанесено покрытие из проводящих материалов, таких как платина или золото, или из электродов на углеродной основе. При приложенном напряжении миграция и перераспределение ионов, вызываемые напряжением, приложенным к полоске из IPMC, приводят к деформации изгиба. Полимер представляет собой набухшую в растворителе, ионообменную полимерную мембрану. Поле вызывает перемещение катионов к стороне катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация в зоне катода приводит к механическому напряжению в остальной части полимерной матрицы, приводящему к изгибанию по направлению к аноду. Перемена полярности приложенного напряжения приводит к изгибу в противоположном направлении.
Если электроды, осажденные гальваническим способом, расположены с несимметричной конфигурацией, приложенное напряжение может вызывать все виды деформаций, таких как кручение, свертывание, спиральное закручивание, изгибание и деформацию несимметричного изгиба.
Во всех этих примерах могут быть предусмотрены дополнительные пассивные слои для оказания воздействия на электрические и/или механические характеристики слоя ЭАП, проявляющиеся в качестве реакции на приложенное электрическое поле.
Слой каждого устройства, образованный из ЭАП, может быть размещен между электродами. Электроды могут быть растягивающимися, чтобы они соответствовали деформации слоя из электроактивного полимерного материала. Материалы, пригодные для электродов, также известны и могут быть выбраны, например, из группы, состоящей из тонких металлических пленок, таких как пленки из золота, меди или алюминия, или органических проводящих материалов, таких как углеродная сажа, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например, поли(3,4-этилендиокситиофен)поли(стиролсульфонат) (PEDOT:PSS). Также могут быть использованы металлизированные полиэфирные пленки, такие как металлизированный полиэтилентерефталат (РЕТ), например, с использованием алюминиевого покрытия.
Изобретение может применяться во многих областях применения ЭАП и фотоактивных полимеров, включая примеры, в которых пассивная матрица в виде упорядоченной совокупности актуаторов или датчиков, или комбинации датчиков и актуаторов представляет интерес.
Изобретение представляет интерес в общем случае для измерения скорости потока и при необходимости для его применения в сочетании с измерением нагрузки, приведением в действие и измерением температуры в целях, отличных от определения скорости потока.
Во многих применениях основная функция изделия базируется на (локальном) измерении и при необходимости также манипулировании тканью человека или на приведения в действие поверхностей, контактирующих с тканью. В таких применениях актуаторы с ЭАП обеспечивают, например, специфические преимущества главным образом вследствие малого форм-фактора, гибкости и высокой плотности потока энергии. Следовательно, ЭАП и фоточувствительные полимеры могут быть легко включены в мягкие, имеющие трехмерную форму и/или миниатюрные изделия и интерфейсы. Примерами таких применений являются:
Изобретение может быть применено в медицинских и немедицинских областях, например, для компонентов (клапанов, труб, насосов), обеспечивающих регулирование потока текучей среды или газа, с встроенными средствами измерения давления и потока. В медицинской области оно представляет интерес для внутрисосудистых катетеров и проводников, а также для дыхательных систем.
Как рассмотрено выше, в вариантах осуществления используется контроллер. Контроллер может быть реализован многочисленными способами посредством программного обеспечения и/или аппаратного обеспечения для выполнения различных требуемых функций. Процессор представляет собой один пример контроллера, в котором используются один или более микропроцессоров, которые могут быть запрограммированы при использовании программного обеспечения (например, микрокода) для выполнения требуемых функций. Тем не менее, контроллер может быть реализован с использованием или без использования процессора, а также может быть реализован в виде комбинации специализированного аппаратного обеспечения, предназначенного для выполнения некоторых функций, и процессора (например, одного или более запрограммированных микропроцессоров и соответствующих схем), предназначенного для выполнения других функций.
Примеры компонентов контроллера, которые могут быть использованы в различных вариантах осуществления настоящего раскрытия изобретения, включают, среди прочего, обычные микропроцессоры, специализированные интегральные схемы (ASIC) и программируемые пользователем, вентильные матрицы (FPGA).
В различных реализациях процессор или контроллер могут быть соединены с одним или более носителями информации, такими как энергозависимая и энергонезависимая память компьютера, такая как ОЗУ (RAM), программируемое ПЗУ (PROM), стираемое программируемое ПЗУ (EPROM) и электрически стираемое программируемое ПЗУ (EEPROM). Носители информации могут быть закодированы посредством одной или более программ, которые при их выполнении в одном или более процессорах и/или контроллерах (40) обеспечивают выполнение требуемых функций. Различные носители информации могут быть зафиксированы в процессоре и/или контроллере или могут быть перемещаемыми, так что данные одна или более программ, хранящихся на них, могут быть загружены в процессор и/или контроллер.
Другие изменения раскрытых вариантов осуществления могут быть понятными для специалистов в данной области техники и могут быть осуществлены ими при реализации заявленного изобретения на практике на основе изучения чертежей, раскрытия изобретения и приложенной формулы изобретения. В формуле изобретения слово «содержащий» не исключает других элементов или этапов, и использование единственного числа не исключает множественного числа. Само по себе то, что определенные меры приведены в отличающихся друг от друга, зависимых пунктах формулы изобретения, не указывает на то, что комбинация данных мер не может быть с успехом использована. Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничивающие объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОДНОЕ И СЕНСОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2721302C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ФИЗИОЛОГИЧЕСКОГО ПАРАМЕТРА | 2017 |
|
RU2750352C2 |
| ДАТЧИКИ НА ОСНОВЕ ЭЛЕКТРОАКТИВНЫХ ПОЛИМЕРОВ И СПОСОБЫ ВОСПРИЯТИЯ | 2016 |
|
RU2723887C2 |
| УСТРОЙСТВО С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2720478C2 |
| АКТУАТОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2737789C2 |
| УСТРОЙСТВО МОЛОКООТСОСА | 2017 |
|
RU2754631C2 |
| ИСПОЛНИТЕЛЬНОЕ И СЧИТЫВАЮЩЕЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2018 |
|
RU2753750C2 |
| УСТРОЙСТВО АНАЛИЗА ПОВЕРХНОСТИ И МЕТОД АНАЛИЗА УПРУГОСТИ ВОСПРИНИМАЮЩЕЙ ПОВЕРХНОСТИ | 2017 |
|
RU2748878C2 |
| ПРИВОДНОЕ УСТРОЙСТВО, СОДЕРЖАЩЕЕ ПРИВОД НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА, И СПОСОБ ВОЗБУЖДЕНИЯ | 2017 |
|
RU2736071C2 |
| УСТРОЙСТВО ПРИВОДА И СПОСОБ | 2017 |
|
RU2749570C2 |
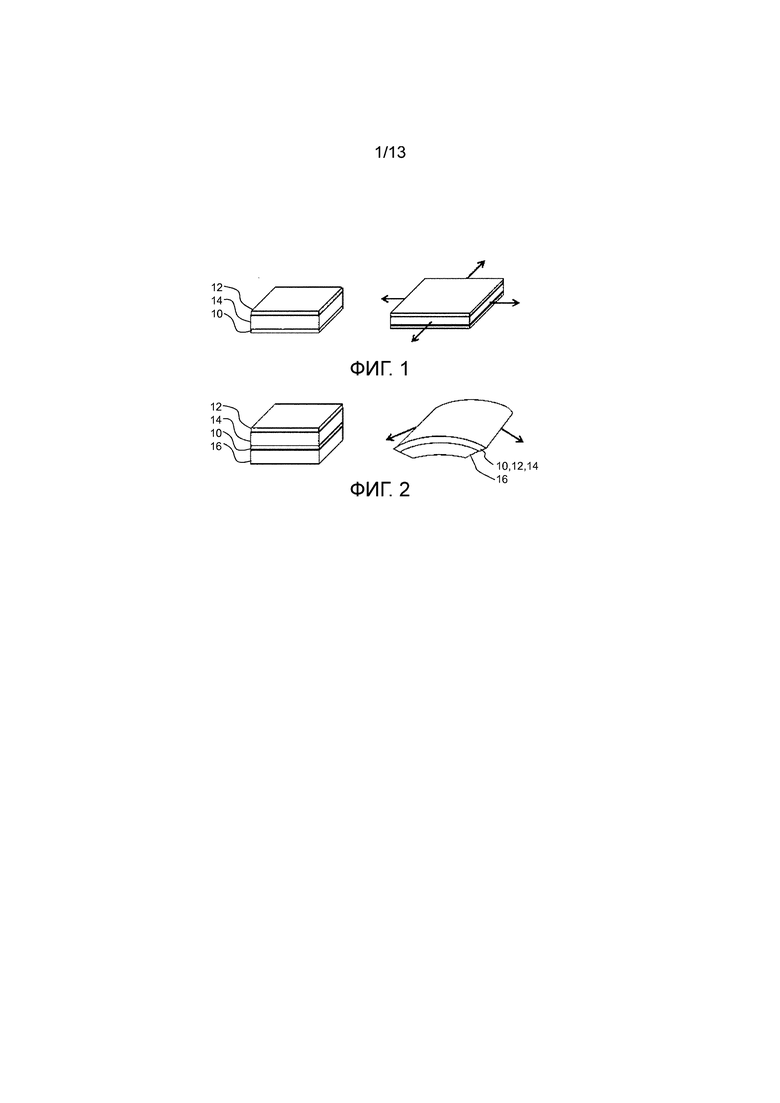
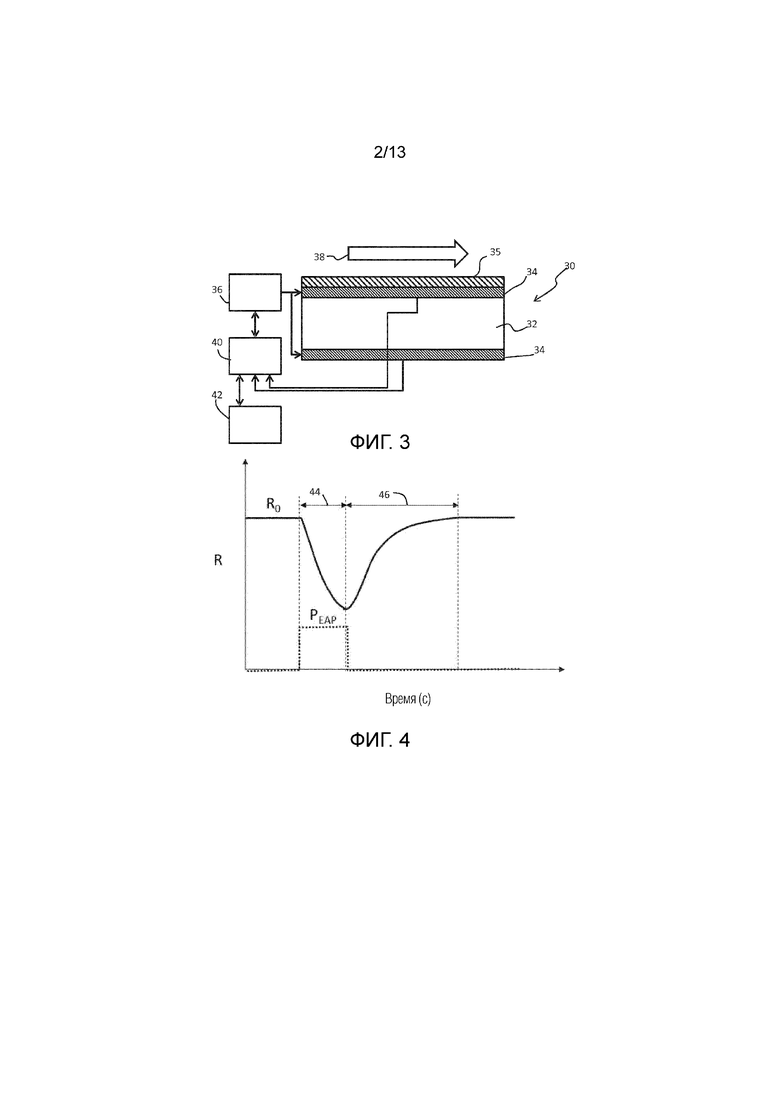
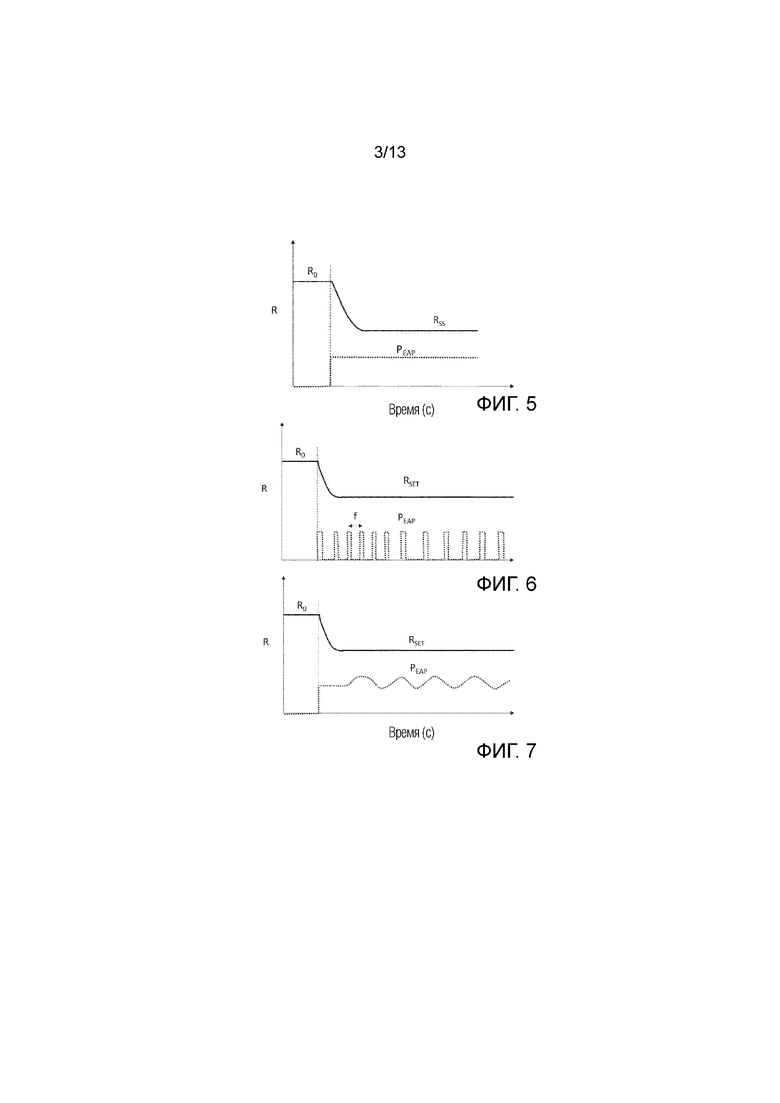
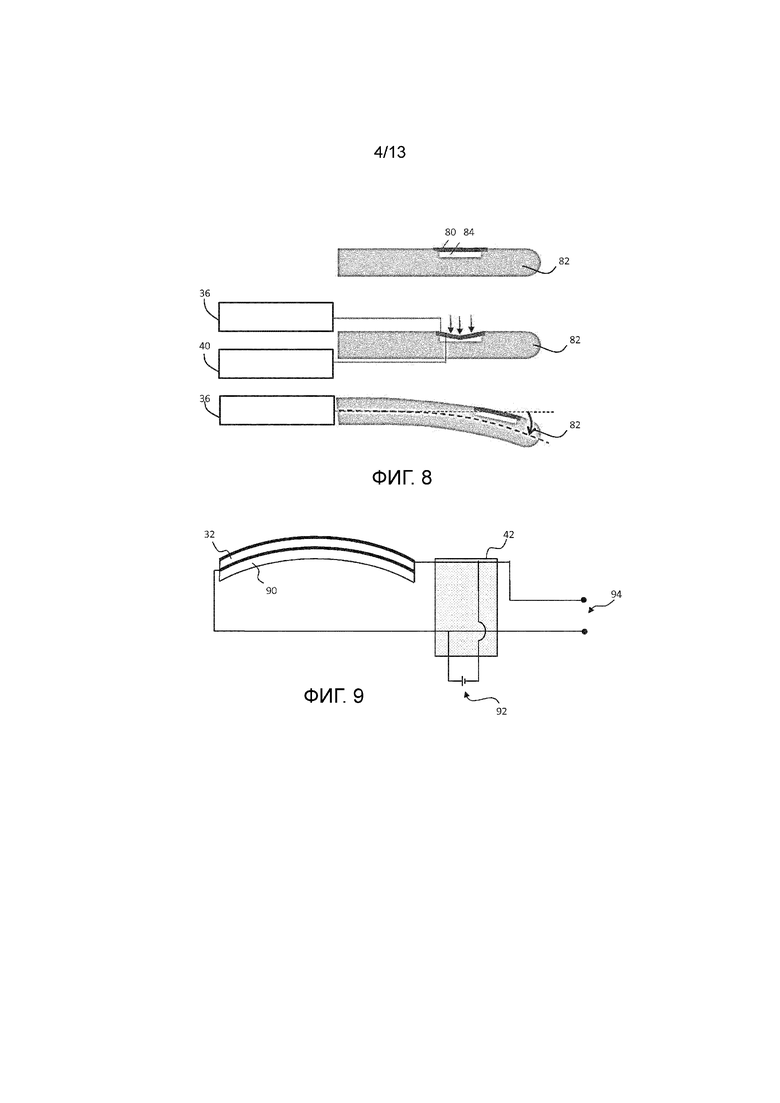
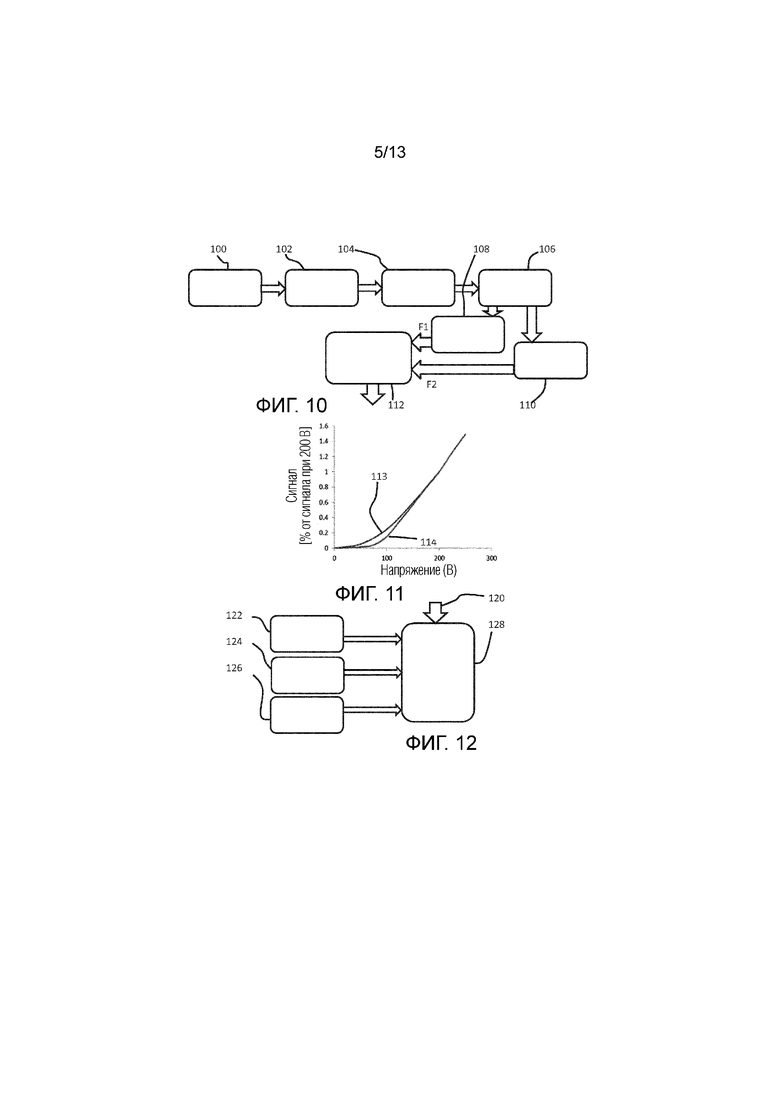
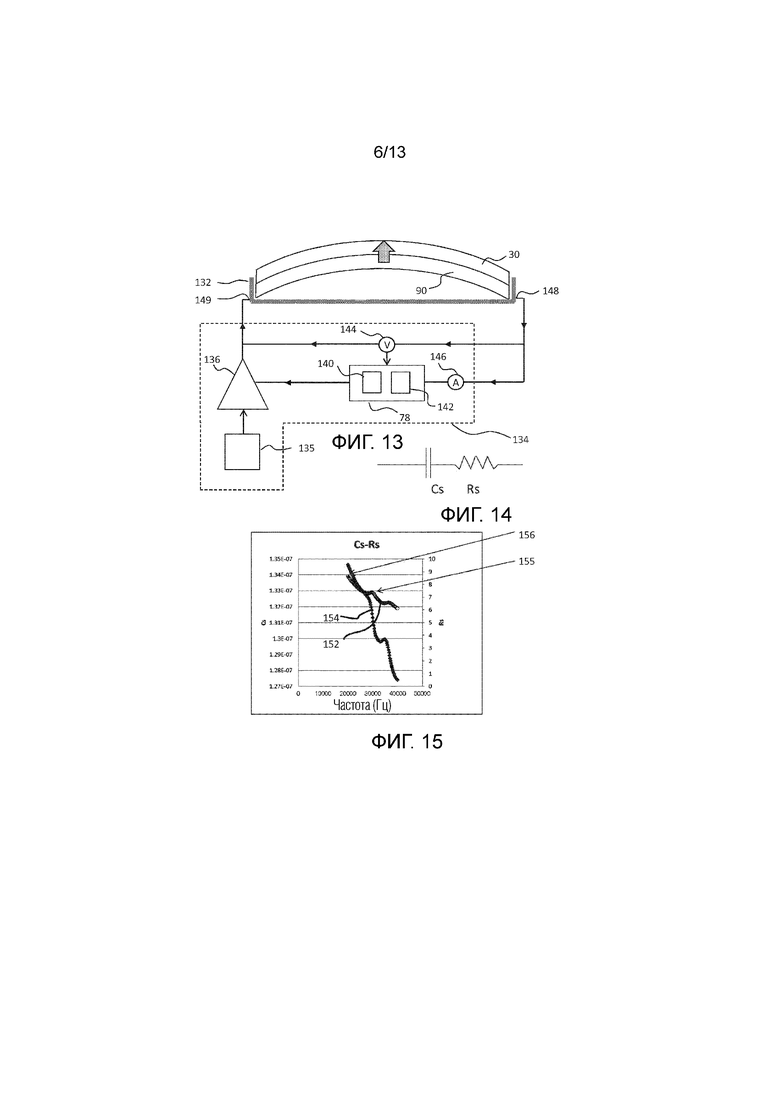
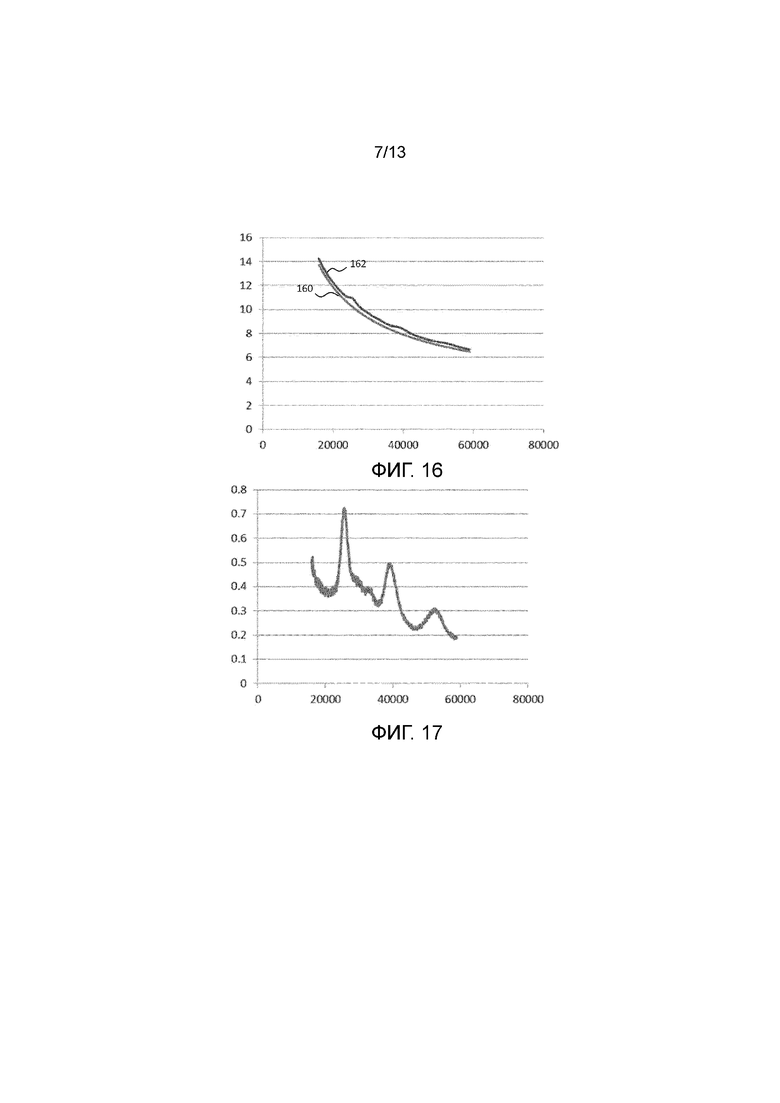
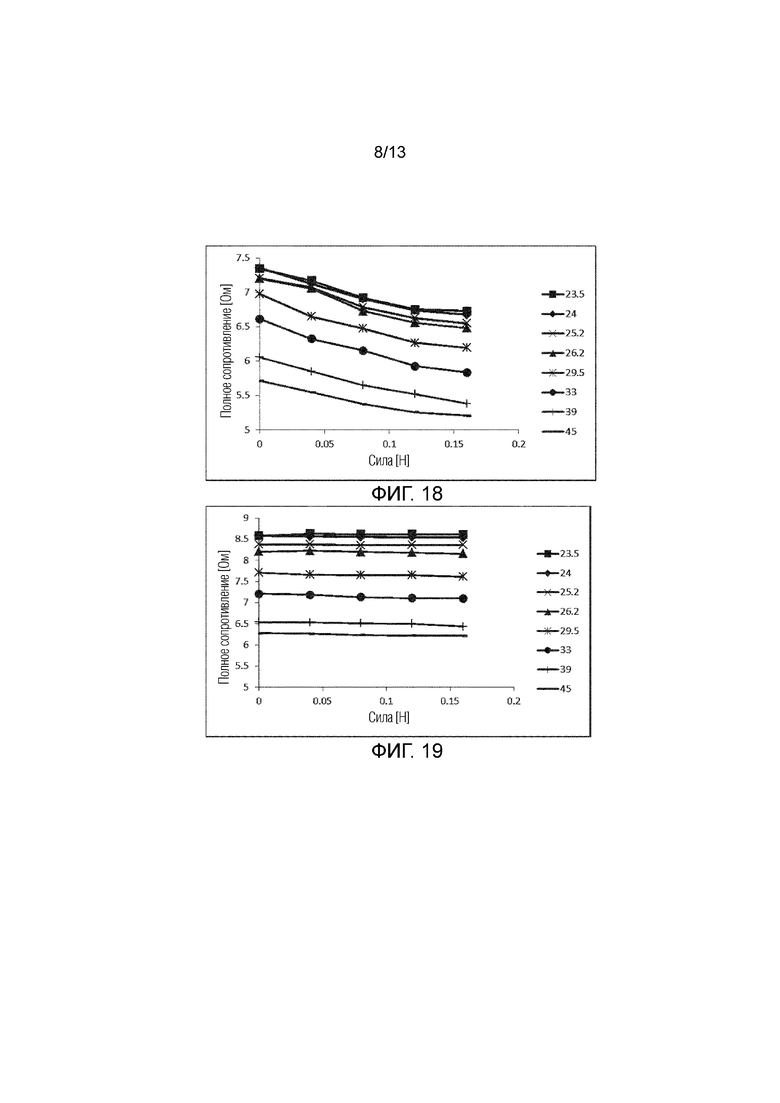

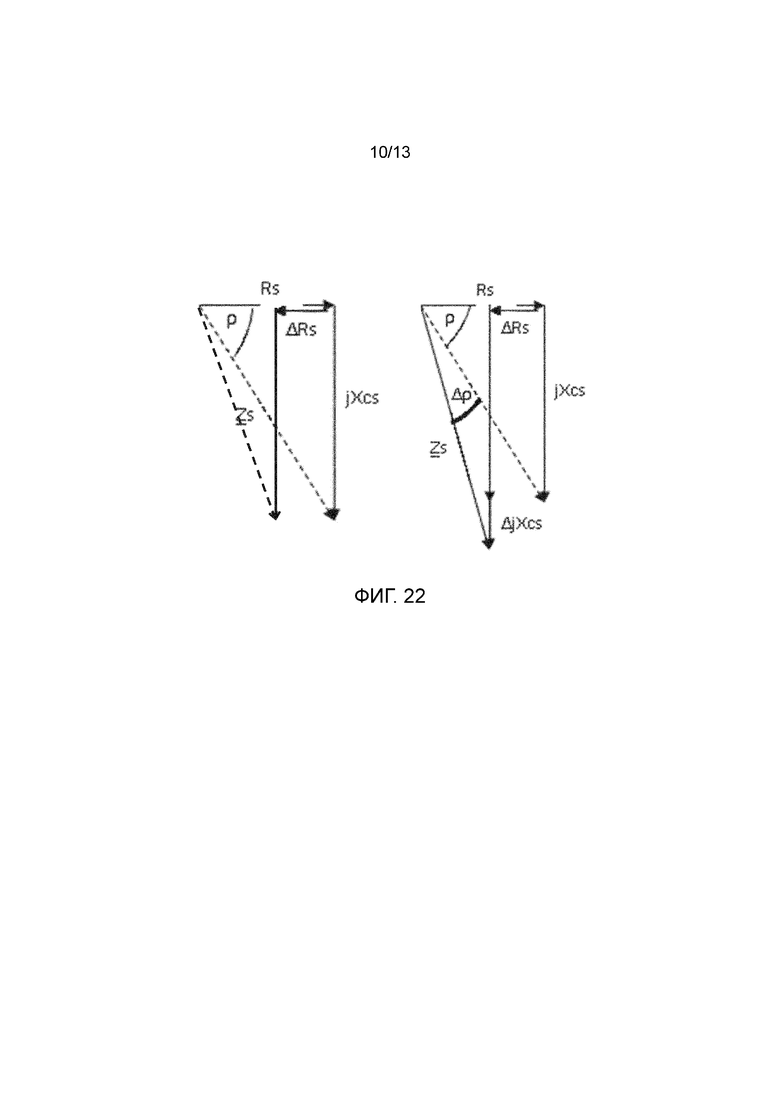
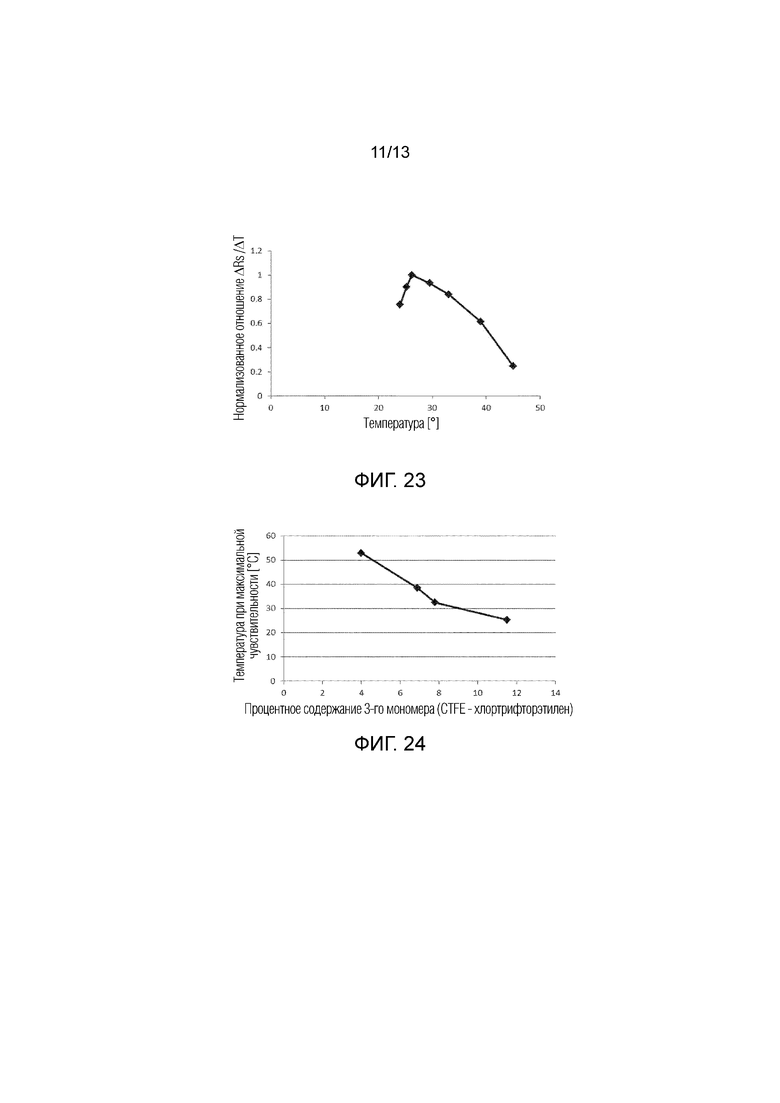
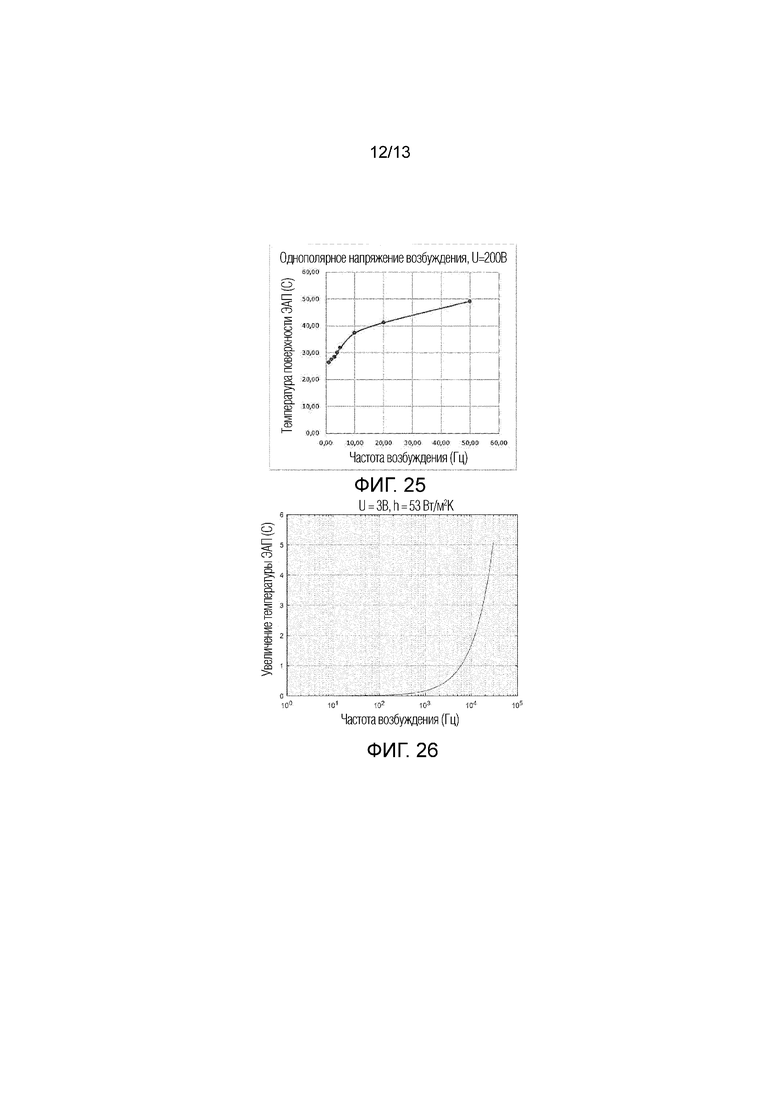
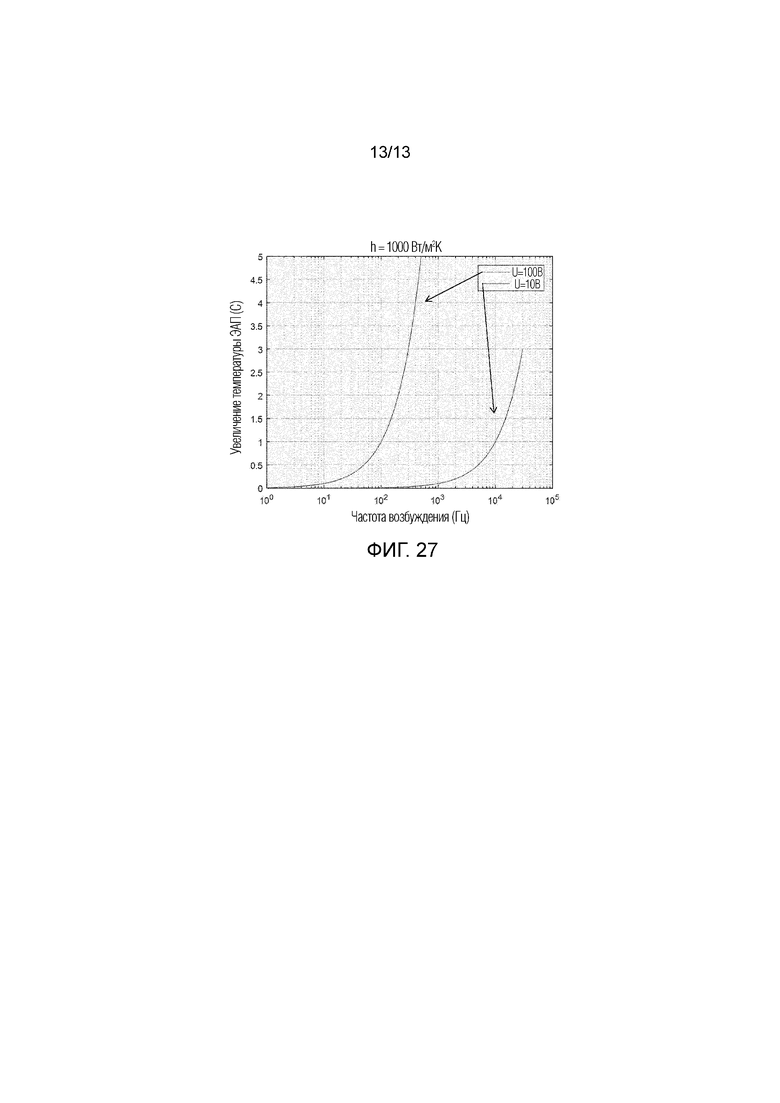
Группа изобретений относится к медицине, а именно к датчику для измерения потока крови, способу измерения скорости потока крови, внутрисосудистому катетеру, внутрисосудистому проводнику катетера. Датчик для измерения потока крови содержит компоновку устройства электроактивного материала, привод, контроллер. Привод предназначен для управления компоновкой устройства электроактивного материала для локального подвода тепла к текучей среде, поток которой подлежит измерению. Контроллер выполнен с возможностью считывания измерительных сигналов с компоновки устройства электроактивного материала, использования измерительных сигналов для получения результата измерения потока. Измерительные сигналы с компоновки устройства электроактивного материала относятся к температуре на устройстве с электроактивным материалом. При исполнении способа управляют компоновкой устройства электроактивного материала для локального подвода тепла к текучей среде, скорость потока которой подлежит измерению. Считывают измерительные сигналы от компоновки устройства электроактивного материала. Измерительные сигналы относятся к температуре на устройстве электроактивного материала. Используют измерительные сигналы для определения результата измерения потока. При считывании измерительных сигналов с помощью контроллера предоставляют показания датчика для выполнения измерений электрической характеристики. Определяют температуру из измерений на датчике электроактивного материала. Электрическая характеристика содержит импеданс или фазовый угол импеданса устройства электроактивного материала на первой частоте и на второй частоте, отличной от первой частоты. Внутрисосудистый катетер содержит датчик для измерения потока крови. Внутрисосудистый проводник катетера содержит датчик для измерения потока крови. Обеспечивается датчик и способ измерения скорости потока крови на основе измерения снижения температуры, за счет измерения электрической характеристики, содержащей импеданс или фазовый угол импеданса устройства электроактивного материала, взаимные влияния температуры и давления могут быть устранены, так что температура может быть измерена при любом давлении. 4 н. и 12 з.п. ф-лы, 27 ил.
1. Датчик для измерения потока крови, содержащий:
- компоновку (30) устройства электроактивного материала;
- привод (36) для управления компоновкой устройства электроактивного материала для локального подвода тепла к текучей среде, поток которой подлежит измерению; и
- контроллер (40, 42), выполненный с возможностью:
-- считывания измерительных сигналов с компоновки устройства электроактивного материала, измерительные сигналы которой относятся к температуре на устройстве с электроактивным материалом; и
- - использования измерительных сигналов для получения результата измерения потока,
при этом контроллер дополнительно выполнен с возможностью:
- считывания измерительных сигналов посредством предоставления показаний датчика для выполнения измерений электрической характеристики, которая содержит импеданс или фазовый угол импеданса устройства электроактивного материала на первой частоте и на второй частоте, отличающейся от первой частоты, и
- определение температуры из измерений на датчике электроактивного материала.
2. Датчик по п. 1, в котором привод (36) выполнен с возможностью выдачи управляющих сигналов с частотой, превышающей резонансную частоту устройства электроактивного материала.
3. Датчик по п. 1 или 2, в котором электроактивный материал содержит ферроэлектрический релаксорный полимер, например, такой как терполимер на основе поливинилиденфторида (PVDF).
4. Датчик по любому предшествующему пункту, в котором привод (36) выполнен с возможностью подвода тепла в течение заданного промежутка (44) времени, и контроллер выполнен с возможностью считывания измерительных сигналов для мониторинга функции (46) последующего снижения температуры и тем самым преобразования постепенного изменения измерительных сигналов во времени в результаты измерения потока.
5. Датчик по п. 4, в котором контроллер (40, 42) выполнен с возможностью измерения промежутка времени до того момента, когда температура достигнет исходной температуры, и тем самым преобразования постепенного изменения измерительных сигналов во времени в результаты измерения потока.
6. Датчик по любому из пп. 1-3, в котором привод (36) выполнен с возможностью непрерывного подвода тепла в течение промежутка времени измерения потока, и контроллер выполнен с возможностью считывания измерительных сигналов для мониторинга установившейся температуры.
7. Датчик по любому из пп. 1-3, в котором привод (36) выполнен с возможностью подвода тепла в течение промежутка времени измерения потока, и контроллер выполнен с возможностью управления скоростью подвода тепла для достижения заданной установившейся температуры.
8. Датчик по п. 7, в котором контроллер (40) выполнен с возможностью регулирования коэффициента заполнения или частоты импульсов подвода тепла.
9. Датчик по любому предшествующему пункту, в котором компоновка устройства электроактивного материала содержит компоновку первого устройства электроактивного материала, функционирующего в качестве нагревателя, и второго и третьего устройств электроактивного материала, функционирующих в качестве датчиков.
10. Датчик по любому предшествующему пункту, в котором компоновка устройства электроактивного материала дополнительно функционирует в качестве: датчика внешнего давления и/или актуатора.
11. Датчик по любому предшествующему пункту, в котором контроллер (40, 42) выполнен с возможностью определения внешнего(-й) давления или силы, приложенного(-й) к компоновке устройства электроактивного материала.
12. Датчик по любому предшествующему пункту, в котором первая частота представляет собой антирезонансную частоту, при которой электрическая характеристика имеет минимальное значение, или резонансную частоту, при которой электрическая характеристика имеет максимальное значение и вторая частота представляет собой частоту, при которой электрическая характеристика является постоянной по отношению к нагрузке.
13. Внутрисосудистый катетер, содержащий датчик по любому предшествующему пункту.
14. Способ измерения скорости потока крови, содержащий этапы, на которых:
- управляют компоновкой устройства электроактивного материала для локального подвода тепла к текучей среде, скорость потока которой подлежит измерению;
- считывают измерительные сигналы от компоновки устройства электроактивного материала, при этом указанные измерительные сигналы относятся к температуре на устройстве электроактивного материала; и
- используют измерительные сигналы для определения результата измерения потока,
при этом считывание измерительных сигналов содержит:
- предоставление показаний датчика для выполнения измерений электрической характеристики, которая содержит импеданс или фазовый угол импеданса устройства электроактивного материала на первой частоте и на второй частоте, отличной от первой частоты, и
- определение температуры из измерений на датчике электроактивного материала.
15. Способ по п. 14, содержащий подачу сигналов привода на частоте, превышающей резонансную частоту устройства электроактивного материала, для подвода тепла.
16. Внутрисосудистый проводник катетера, содержащий датчик по пп. 1-12.
| WO 2006135293 A1, 21.12.2006 | |||
| RU 2012134648 A, 20.02.2014 | |||
| US 4726225 A, 23.02.1988 | |||
| US 2015297093 A1, 22.10.2015 | |||
| WO 2015150913 A2, 08.10.2015. |

