Изобретение относится к автоматике и вычислительной технике и может быть использовано в специализированных устройствах вычислительной техники для исследования возможностей использования крылатых ракет большой дальности для поражения подвижных объектов ракетного соединения, а также для моделирования процесса полета крылатых ракет большой дальности.
Известны своим практическим использованием устройства моделирования барометрической высоты полета содержащие: интегратор, три сумматора, датчик текущего уровня местности, ключ, блок памяти, датчик атмосферного давления на текущем уровне местности, блок вычисления поправки на изменение атмосферного давления, датчик наружной температуры на текущем уровне местности и блок вычисления поправки на изменение наружной температуры.
Недостатками данного типа устройств является низкая надежность устройства, в следствии того что его конструкция имеет множество элементов свойственных к отказу, а также сравнительно медленная работа устройства при моделировании процессов полета.
Наиболее близким по технической сущности является (SU №405120 1972 г.) Устройство для моделирования условий полета содержащее: задатчик высоты с индикатором; три блока нелинейности; операционный и суммирующий усилители; задатчик скорости с индикатором; блок умножения - сложения; блоки умножения; блок моделирования газотурбинных двигателей.
Применение подобных устройств ограничивается функциональными возможностями устройства, не позволяющими применять его в электронном моделировании для исследования процессов функционирования крылатых ракет большой дальности.
Задачей изобретения является создание устройства, позволяющего на основе исходных данных, и принятых допущений (с помощью которых задается оперативно - тактическая обстановка) проводить имитационное моделирование процесса полета крылатых ракет большой дальности, для исследований возможностей их использования для поражения подвижных объектов ракетного соединения.
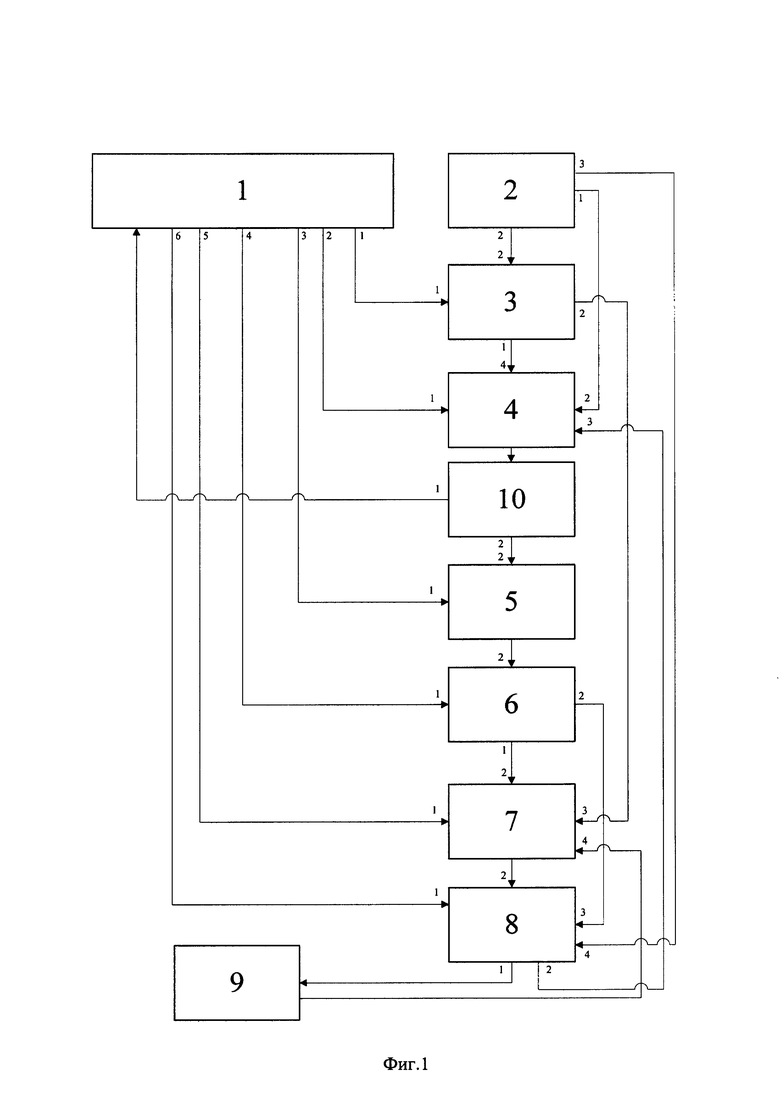
Требуемый технический результат достигается тем, что в устройство, содержащее: задатчик высоты с индикатором; три блока нелинейности; операционный и суммирующий усилители; задатчик скорости с индикатором; блок умножения - сложения; блоки умножения; блок моделирования газотурбинных двигателей, введены: блок ввода исходных данных; генератор случайных чисел; блок моделирования терминального маневра; блок определения расстояния; блок определения направления; блок определения координат; блок проверки начала маневра; блок определения района; блок моделирования уничтожения цели; блок проверки уничтожения крылатой ракеты большой дальности, при этом первый выход блока ввода исходных данных (1) соединен с первым входом блока моделирования терминального маневра (3), второй выход блока ввода исходных данных (1) соединен с первым входом блока определения расстояния (4), третий выход блока ввода исходных данных (1) соединен с первым входом блока определения направления (6), четвертый выход блока ввода исходных данных (1) соединен с первым входом блока определения координат (7), пятый выход блока ввода исходных данных (1) соединен с первым входом блока проверки начала маневра (8), шестой выход блока ввода исходных данных (1) соединен с первым входом блока определения района (9), первый выход генератора случайных чисел (2) соединен со вторым входом блока определения расстояния (4), второй выход генератора случайных чисел (2) соединен со вторым входом блока моделирования терминального маневра (3), второй выход которого соединен с третьим входом блока проверки начала маневра (8), первый выход блока моделирования терминального маневра (3) соединен с четвертым входом блока определения расстояния (4), выход блока проверки уничтожения крылатой ракеты большой дальности (5) соединен с входом блока ввода исходных данных (1), третий выход генератора случайных чисел (2) соединен с четвертым входом блока определения района (9), выход блока определения расстояния (4) соединен входом блока проверки уничтожения крылатой ракеты большой дальности (5), второй выход которого соединен со вторым входом блока определения направления (6), выход, которого соединен со вторым входом блока определения координат (7), второй выход блока определения координат (7) соединен с третьим входом блока определения района (9), второй выход которого соединен с третьим входом блока определения расстояния (4), первый выход блока определения координат (7) соединен со вторым входом блока проверки начала маневра (8), выход, которого соединен со вторым входом блока определения района (9), первый выход блока определения района (9) соединен с входом блока моделирования уничтожения цели (10), выход, которого соединен с четвертым входом блока проверки начала маневра (8).
Сущность изобретения поясняется чертежом, где на фиг. 1 представлен возможный вариант построения устройства для моделирования процесса полета крылатых ракет большой дальности, который содержит:
1. блок ввода исходных данных;
2. генератор случайных чисел;
3. блок моделирования терминального маневра;
4. блок определения расстояния;
5. блок проверки уничтожения крылатой ракеты большой дальности.
6. блок определения направления;
7. блок определения координат;
8. блок проверки начала маневра;
9. блок определения района;
10. блок моделирования уничтожения цели.
Работает устройство для моделирования процесса полета крылатых ракет большой дальности следующим образом: в блок ввода исходных данных, вводят следующие параметры: х0 - координаты крылатой ракеты большой дальности на момент начала моделирования, по оси абсцисс; y0 - координаты крылатой ракеты большой дальности на момент начала моделирования, по оси ординат; хц - координаты заранее назначенной цели, по оси абсцисс; уц - координаты заранее назначенной цели, по оси ординат; mutKP - математическое ожидание угла набора высоты крылатой ракеты большой дальности в начале терминального маневра; σutKP - среднеквадратическое отклонение угла набора высоты крылатой ракеты большой дальности в начале терминального маневра; mhtKP - математическое ожидание высоты полета крылатой ракеты большой дальности в начале терминального маневра; σhtKP - среднеквадратическое отклонение высоты полета крылатой ракеты большой дальности в начале терминального маневра; mVKP - математическое ожидание скорости полета крылатой ракеты большой дальности на участке маршрута; σVKP - среднеквадратическое отклонение скорости полета крылатой ракеты большой дальности на участке маршрута; mhKP - математическое ожидание высоты полета крылатой ракеты большой дальности на участке маршрута; σhKP - среднеквадратическое отклонение высоты полета крылатой ракеты большой дальности на участке маршрута; σКР - среднеквадратическое отклонение попадания крылатой ракеты большой дальности в цель; Lmax - дальность полета крылатых ракет большой дальности, Н - высота поражения цели.
После, генератором случайных чисел, генерируются четыре случайных числа Rnd1, Rnd2 Rnd3, Rnd4, равномерно распределенных на интервале [0;1].
В блоке моделирования терминального маневра определяются координаты (х0,y0) на момент времени начала моделирования i=0, моделируется расстояние начала терминального маневра, путем определения случайного числа ξ, равномерно распределенного на интервале от n1 до n2 по формуле:

после чего определяется высота подъема и угол набора высоты в начале терминального маневра, в соответствии со следующими выражениями:

В блоке определения расстояния рассчитывается расстояние между крылатой ракеты большой дальности и целью  в соответствии с выражением:
в соответствии с выражением:

После, в блоке определения направления, путем вычисления угла между прямой проведенной через координаты крылатой ракеты большой дальности (xi,yi) и координаты цели (хц,yц), определяется угол направления на цель (ϕ), в соответствии с выражением:
В блоке определения координат рассчитывается средняя скорость и высота полета крылатой ракеты большой дальности за единицу модельного времени, в соответствии с выражением:

вычисляется расстояние, пройденное в плоскости полета крылатой ракеты большой дальности за единицу модельного времени:
после чего определяются координаты крылатой ракеты большой дальности в момент времени i, путем вычисления приращения координат по х и по y, в соответствии с выражением:
в соответствии с выражением, приведенным ниже вычисляются коэффициенты  и
и  определяющие направления изменения координат крылатой ракеты большой дальности:
определяющие направления изменения координат крылатой ракеты большой дальности:
после чего, в соответствии с выражениями, вычисляются координаты крылатой ракеты большой дальности:
В блоке проверки начала маневра происходит проверка следующего условия:
если расстояние до цели меньше расстояния начала терминального маневра  , то происходит проверка условия нахождения в районе атаки цели, если расстояние больше, рассчитывается высота полета крылатой ракеты большой дальности на текущий момент модельного времени, в соответствии с выражением:
, то происходит проверка условия нахождения в районе атаки цели, если расстояние больше, рассчитывается высота полета крылатой ракеты большой дальности на текущий момент модельного времени, в соответствии с выражением:

после чего проверяется выполнение условия достаточности набранной высоты:
в случае невыполнения условия, остается ранее присвоенное значение, а в случае выполнения условия, высоте присваивается новое значение, в соответствии с выражением:

После, в блоке определения района происходит проверка выполнения условия нахождения в районе атаки цели, в соответствии с правилом:
если расстояние до цели меньше расстояния начала маневра крылатой ракеты большой дальности возвращаемся в блок определения расстояния, а если расстояние до цели меньше расстояния начала маневра крылатой ракеты большой дальности, координаты (xi, yi) крылатой ракеты большой дальности определяются в соответствии с приведенными ниже выражениями, путем приравнивания математического ожидания к координатам цели, уменьшение высоты на величину, пройденную за единицу модельного времени и вычисления скорости полета крылатой ракеты большой дальности:
В блоке моделирования уничтожения цели происходит проверка выполнения следующего условия:
в случае невыполнения условия возвращаемся в блок проверки начала маневра, а в случае выполнения условия, моделируется поражение цели, после чего происходит проверка условия уничтожения крылатой ракеты большой дальности.
После, в блоке проверки уничтожения крылатой ракеты большой дальности происходит определение поражения крылатой ракеты большой дальности, в соответствии с правилом
в случае выполнения условия, моделирование прекращается, крылатой ракеты большой дальности считается уничтоженной, а цель не пораженной, данный алгоритм повторяется для остальных крылатой ракеты большой дальности, в случае невыполнения, определяется следующий момент модельного времени i:=i+1, и возвращение в блок моделирования терминального маневра.
В устройстве для моделирования процесса полета крылатых ракет большой дальности, при построении модели применяются следующее допущение:
- осуществляется массированный пуск по заранее разведанным целям в короткое время.
Указанная последовательность моделирования процесса полета крылатых ракет большой дальности реализуется следующим образом. При запуске устройства от внешнего источника, не показанного на чертеже, в блок ввода исходных данных (1), вводят следующие параметры: х0 - координаты КРБД на момент начала моделирования, по оси абсцисс; y0 - координаты КРБД на момент начала моделирования, по оси ординат; хц - координаты заранее назначенной цели, по оси абсцисс; yц - координаты заранее назначенной цели, по оси ординат; mutKP - математическое ожидание угла набора высоты крылатых ракет большой дальности в начале терминального маневра; σutKP - среднеквадратическое отклонение угла набора высоты крылатых ракет большой дальности в начале терминального маневра; mhtKP - математическое ожидание высоты полета крылатых ракет большой дальности в начале терминального маневра; σhtKP - среднеквадратическое отклонение высоты полета крылатых ракет большой дальности в начале терминального маневра; mVKP - математическое ожидание скорости полета крылатых ракет большой дальности на участке маршрута; σVKP - среднеквадратическое отклонение скорости полета крылатых ракет большой дальности на участке маршрута; mhKP - математическое ожидание высоты полета крылатых ракет большой дальности на участке маршрута; σhKP - среднеквадратическое отклонение высоты полета крылатых ракет большой дальности на участке маршрута; σКР - среднеквадратическое отклонение попадания крылатых ракет большой дальности в цель; Lmax - дальность полета крылатых ракет большой дальности, Н - высота поражения цели. Из первого выхода блока ввода исходных данных (1) на первый вход блока моделирования терминального маневра (3), подается 6 параметров: mutKP; σutKP; mhtKP; σhtKP; x0; y0. Из второго выхода блока ввода исходных данных (1) на первый вход блока определения расстояния (4), подается 3 параметра: хц; уц; Lmax. Из третьего выхода блока ввода исходных данных (1) на первый вход блока определения направления (6), подается 2 параметра: хц; уц. Из четвертого выход блока ввода исходных данных (1) на первый вход блока определения координат (7), подается 5 параметров: mVKP; σVKP, mhKP; σhKP; σКР. Из пятого выхода блока ввода исходных данных (1) на первый вход блока проверки начала маневра (8), подается 1 параметр: Н. Из шестого выхода блока ввода исходных данных (1) на первый вход блока определения района (9), подается 2 параметра: хц; уц. Из первого выхода генератора случайных чисел (2) на второй вход блока определения расстояния (4), подается 4 параметра: Rnd1; Rnd2; Rnd3; Rnd4. Из второго выхода генератора случайных чисел (2) на второй вход блока моделирования терминального маневра (3), подается 4 параметра: Rnd1; Rnd2; Rnd3; Rnd4. Из второго выхода блока моделирования терминального маневра (3) на третий вход блока проверки начала маневра (8), подается 5 параметров: mhtKP; σhtKP; htKP; Utkp; ξ. Из первого выход блока моделирования терминального маневра (3) соединен с четвертым входом блока определения расстояния (4), подается 2 параметра: xi; yi. Из третьего выхода генератора случайных чисел (2) на четвертый вход блока определения района (9), подается 6 параметров: Rnd1; Rnd2; Rnd3; Rnd4; Rnd5; Rnd6. Из выход блока определения расстояния (4) на вход блока проверки уничтожения крылатой ракеты большой дальности (5), подается 4 параметра: Lmax; xi; yi;  . Из второго выхода блока проверки уничтожения крылатой ракеты большой дальности (5) на второй входом блока определения направления (6), подается 3 параметра: xi; yi;
. Из второго выхода блока проверки уничтожения крылатой ракеты большой дальности (5) на второй входом блока определения направления (6), подается 3 параметра: xi; yi;  . Из блока определения направления (6) на второй вход блока определения координат (7), подается 6 параметров:
. Из блока определения направления (6) на второй вход блока определения координат (7), подается 6 параметров:  ; ϕ; xi; yi; хц; уц. Из второго выхода блока определения координат (7) на третий вход блока определения района (9), подается 2 параметра: σVKP; σКР. Из первого выхода блока определения координат (7) на второй вход блока проверки начала маневра (8), подается 2 параметра:
; ϕ; xi; yi; хц; уц. Из второго выхода блока определения координат (7) на третий вход блока определения района (9), подается 2 параметра: σVKP; σКР. Из первого выхода блока определения координат (7) на второй вход блока проверки начала маневра (8), подается 2 параметра: ;
;  . Из блока проверки начала маневра (8), на второй вход блока определения района (9), подается 4 параметра: H;
. Из блока проверки начала маневра (8), на второй вход блока определения района (9), подается 4 параметра: H;  ;
;  ;
;  . Из блока определения района (9) на вход блока моделирования уничтожения цели (10), подается 3 параметра:
. Из блока определения района (9) на вход блока моделирования уничтожения цели (10), подается 3 параметра:  ;
;  ; Н.
; Н.
Таким образом, благодаря введению новых элементов и связей достигается требуемый технический результат - расширение функциональных возможностей за счет моделирования процесса полета крылатых ракет большой дальности, позволяющее проводить исследование возможностей использования крылатых ракет большой дальности для подвижных объектов ракетного соединения.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. RU №2042200 1991 г.
2. RU №2338992 2007 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования каталога результатов моделирования процесса полета крылатых ракет большой дальности | 2021 |
|
RU2769787C1 |
| Устройство для моделирования процесса функционирования средств противовоздушной обороны | 2019 |
|
RU2734144C1 |
| Устройство для формирования каталога результатов моделирования процесса функционирования средств противовоздушной обороны | 2021 |
|
RU2758248C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ И СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2004 |
|
RU2280265C2 |
| ПРОТИВОЛОДОЧНАЯ КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2014 |
|
RU2546726C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ АТАКУЮЩЕГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2115132C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ЗАЛПОМ АТМОСФЕРНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2691233C2 |
| СПОСОБ РАСПОЗНАВАНИЯ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ПЕРВОГО И ВТОРОГО ПРИРАЩЕНИЙ РАДИАЛЬНОЙ СКОРОСТИ | 2022 |
|
RU2793774C1 |
| Способ оптимальной адаптации маршрута перехвата воздушной цели при нахождении в районе полетов группировки зенитных ракетных комплексов | 2020 |
|
RU2734171C1 |
Изобретение относится к средствам моделирования полета крылатых ракет большой дальности и может быть использовано для исследования процессов с различными характеристиками. Технический результат заключается в повышении точности моделирования полета с проверкой результатов поражения. Устройство содержит: блок ввода исходных данных; генератор случайных чисел; блок моделирования терминального маневра; блок определения расстояния; блок определения направления; блок определения координат; блок проверки начала маневра; блок определения района; блок моделирования уничтожения цели; блок проверки уничтожения крылатых ракет большой дальности. 1 ил.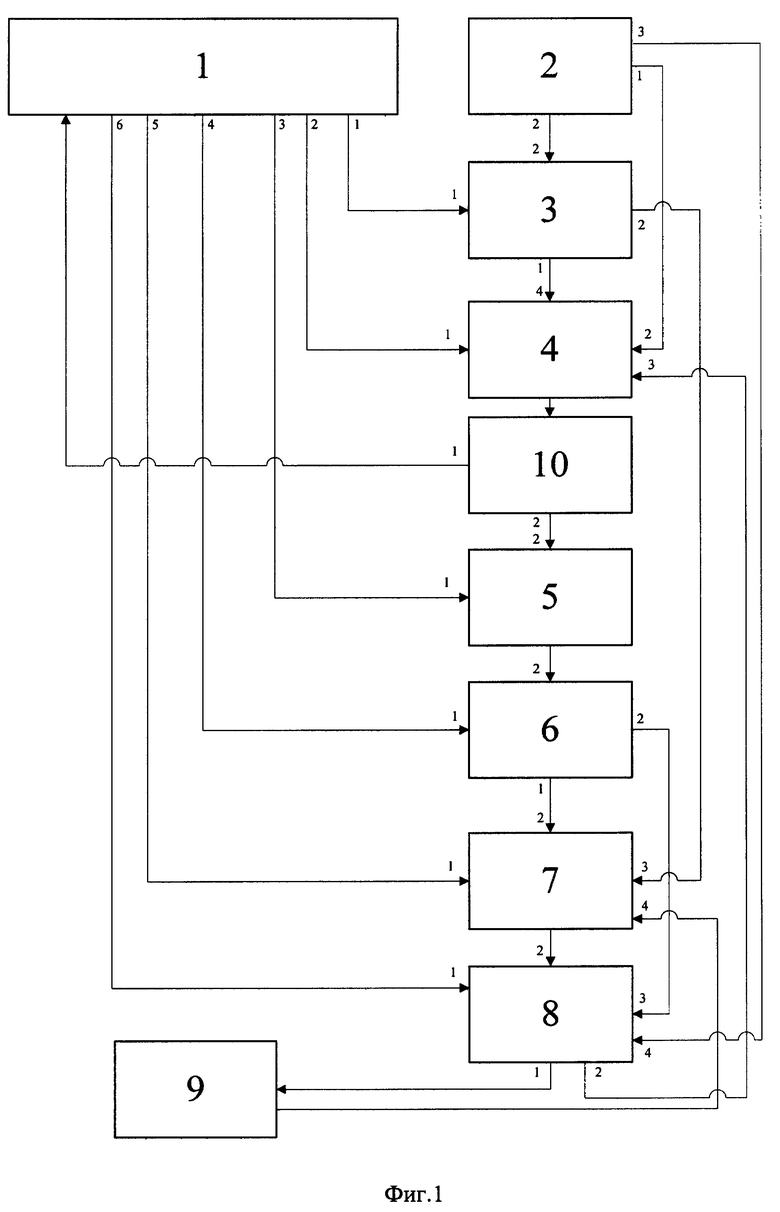
Устройство для моделирования процесса полета крылатых ракет большой дальности, содержащее: задатчик высоты с индикатором; три блока нелинейности; операционный и суммирующий усилители; задатчик скорости с индикатором; блок умножения - сложения; блоки умножения; блок моделирования газотурбинных двигателей, отличающееся тем, что в него дополнительно введены: блок ввода исходных данных; генератор случайных чисел; блок моделирования терминального маневра; блок определения расстояния; блок определения направления; блок определения координат; блок проверки начала маневра; блок определения района; блок моделирования уничтожения цели; блок проверки уничтожения крылатых ракет большой дальности, при этом первый выход блока ввода исходных данных (1) соединен с первым входом блока моделирования терминального маневра (3), второй выход блока ввода исходных данных (1) соединен с первым входом блока определения расстояния (4), третий выход блока ввода исходных данных (1) соединен с первым входом блока определения направления (6), четвертый выход блока ввода исходных данных (1) соединен с первым входом блока определения координат (7), пятый выход блока ввода исходных данных (1) соединен с первым входом блока проверки начала маневра (8), шестой выход блока ввода исходных данных (1) соединен с первым входом блока определения района (9), первый выход генератора случайных чисел (2) соединен со вторым входом блока определения расстояния (4), второй выход генератора случайных чисел (2) соединен со вторым входом блока моделирования терминального маневра (3), второй выход которого соединен с третьим входом блока проверки начала маневра (8), первый выход блока моделирования терминального маневра (3) соединен с четвертым входом блока определения расстояния (4), выход блока проверки уничтожения крылатой ракеты большой дальности (5) соединен с входом блока ввода исходных данных (1), третий выход генератора случайных чисел (2) соединен с четвертым входом блока определения района (9), выход блока определения расстояния (4) соединен входом блока проверки уничтожения крылатой ракеты большой дальности (5), второй выход которого соединен со вторым входом блока определения направления (6), выход которого соединен со вторым входом блока определения координат (7), второй выход блока определения координат (7) соединен с третьим входом блока определения района (9), второй выход которого соединен с третьим входом блока определения расстояния (4), первый выход блока определения координат (7) соединен со вторым входом блока проверки начала маневра (8), выход которого соединен со вторым входом блока определения района (9), первый выход блока определения района (9) соединен с входом блока моделирования уничтожения цели (10), выход которого соединен с четвертым входом блока проверки начала маневра (8).
| ФУНКЦИОНАЛЬНО-МОДЕЛИРУЮЩИЙ СТЕНД ДЛЯ СОЗДАНИЯ УСЛОВИЙ ИНТЕРАКТИВНОГО БЕЗОПОРНОГО ПРОСТРАНСТВА И ПОНИЖЕННОЙ ГРАВИТАЦИИ | 2012 |
|
RU2518478C2 |
| CN 201362362Y, 16.12.2009 | |||
| US 2005116091A1, 02.06.2005 | |||
| МОДЕЛЬ УСТРОЙСТВА ДЛЯ УСКОРЕННОГО ДВИЖЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2477642C2 |

