Изобретение относится к автоматике и вычислительной технике и может быть использовано в специализированных устройствах вычислительной техники для исследований возможностей средств противовоздушной обороны по прикрытию элементов боевого порядка ракетной дивизии подвижных грунтовых ракетных комплексов от средств высокоточного оружия, а также для моделирования процесса функционирования средств противовоздушной обороны с различными характеристиками.
Известны своим практическим использованием устройства выбора предпочтительного варианта построения элемента комплекса средств автоматизации командного пункта части противовоздушной обороны, содержащее: блок входных данных; блок моделирования; блок управления и контроля; блок обработки результатов; базу данных по элементам комплекса средств автоматизации командного пункта части противовоздушной обороны; базу данных по критериям качества функционирования элементов комплекса средств автоматизации командного пункта части противовоздушной обороны; базу данных по уровням важности критериев оценки качества функционирования элементов комплекса средств автоматизации командного пункта части противовоздушной обороны; формирователь модели 1-го критерия оценки качества функционирования различных вариантов элемента комплекса средств автоматизации командного пункта части противовоздушной обороны и оценки предпочтения между вариантами (i) по критерию (1); формирователь модели (ФМ) коэффициентов важности критериев (1) по каждому варианту (i); формирователь модели (ФМ) коэффициентов важности каждого критерия (1); формирователь модели (ФМ) показателя качества каждого из вариантов элемента комплекса средств автоматизации командного пункта части противовоздушной обороны.
Недостатками данного типа устройств является низкая надежность устройства, вследствие того, что его конструкция имеет множество элементов свойственных к отказу, а также сравнительно медленная работа устройства при исследовании процессов функционирования реальных систем противовоздушной обороны.
Наиболее близким по технической сущности является (RU 2585724 2014 г.) устройство для оценки эффективности войск противовоздушной обороны оперативного уровня, содержащее: базу знаний; машину логического вывода; рабочую память; блок объяснения; пользовательский интерфейс; блок приобретения знаний; блок расчета показателей оценки соотношения сил, при выполнении основных задач управления на командном пункте оперативного или оперативно-тактического звена управления на отдельном рубеже; блок расчета показателя оценки соотношения сил по комплексу задач управления на отдельном рубеже; блок определения эффективности управления войсками противовоздушной обороны с командного пункта оперативного звена управления; блок определения эффективности управления войсками противовоздушной обороны с командного пункта тактического звена управления; блок определения эффективности управления войсками противовоздушной обороны оперативного звена в целом.
Применение подобных устройств ограничивается функциональными возможностями устройства, не позволяющими применять его в электронном моделировании для исследования процессов функционирования реальных систем противовоздушной обороны.
Задачей изобретения является создание устройства, позволяющего на основе исходных данных, и принятых допущений (с помощью которых задается оперативно - тактическая обстановка) проводить имитационное моделирование процесса обнаружения, выбора, наведения и поражения атакующих средств высокоточного оружия, системами противовоздушной обороны, для исследований возможностей средств противовоздушной обороны по прикрытию элементов боевого порядка ракетной дивизии подвижных грунтовых ракетных комплексов от средств высокоточного оружия.
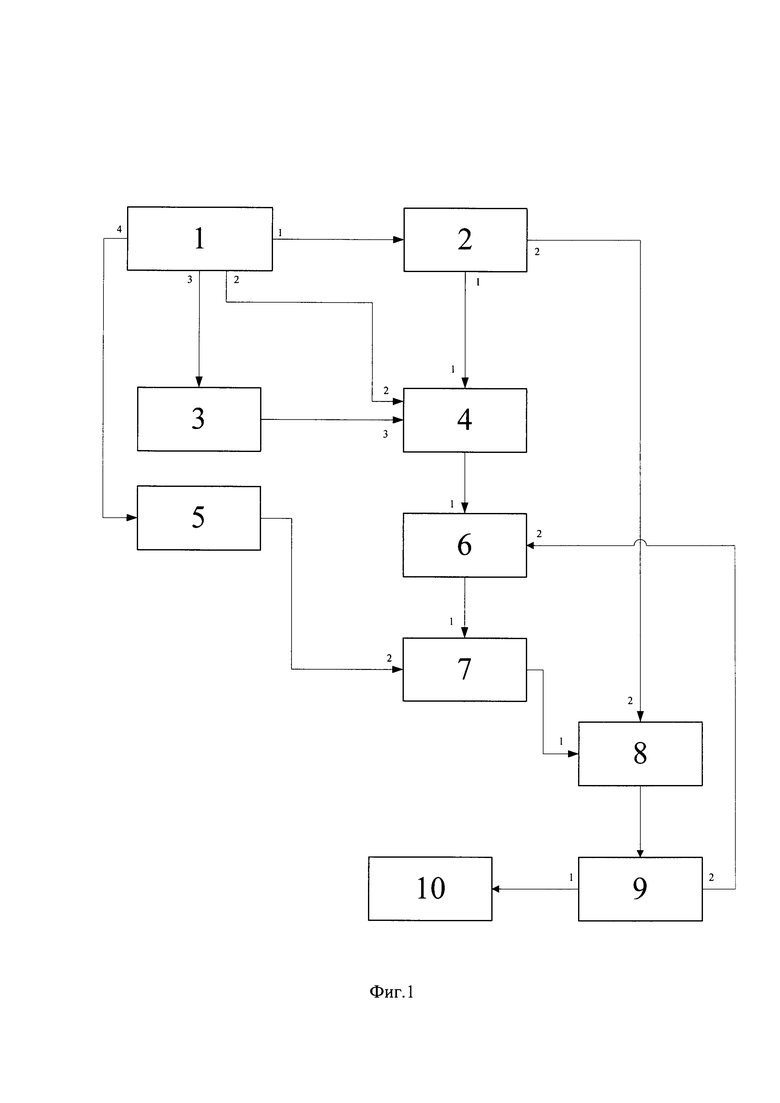
Требуемый технический результат достигается тем, что в устройство, содержащее: базу знаний; машину логического вывода; рабочую память; блок объяснения; пользовательский интерфейс; блок приобретения знаний; блок расчета показателей оценки соотношения сил, при выполнении основных задач управления на командного пункта оперативного или оперативно-тактического звена управления на отдельном рубеже; блок расчета показателя оценки соотношения сил по комплексу задач управления на отдельном рубеже; блок определения эффективности управления войсками противовоздушной обороны с командного пункта оперативного звена управления; блок определения эффективности управления войсками противовоздушной обороны с командного пункта тактического звена управления; блок определения эффективности управления войсками противовоздушной обороны оперативного звена в целом, введены: блок ввода исходных данных; генератор случайных чисел; блок расчета радиуса; блок расчета начальных координат; блок расчета граничного угла и высоты; блок определения координат полета; блок определения нахождения; блок обнаружения; блок выбора и наведения; блок интерфейса, при этом первый выход блока ввода исходных данных (1) соединен с входом генератора случайных чисел (2), второй выход блока ввода исходных данных (1), соединен со вторым входом блока расчета начальных координат (4), третий выход блока ввода исходных данных (1), соединен со входом блока расчета радиуса (3), четвертый выход блока ввода исходных данных (1), соединен со входом блока расчета граничного угла и высоты (5), первый выход генератора случайных чисел (2) соединен с первым входом блока расчета начальных координат (4), выход блока расчета радиуса (3) соединен с третьим входом блока расчета начальных координат (4), выход, которого соединен с первым входом блока определения координат полета (6), выход блока расчета граничного угла и высоты (5), соединен со вторым входом блока определения нахождения (7), выход блока определения координат полета (6) соединен с первым входом блока определения нахождения (7), выход которого соединен с первым входом блока обнаружения (8), второй выход генератора случайных чисел (2) соединен со вторым входом блока обнаружения (8), выход которого соединен с входом блока выбора и наведения (9), второй выход блока выбора и наведения (9) соединен с вторым входом блока определения координат полета (6), первый выход блока выбора и наведения (9) соединен с блоком интерфейса (10).
Сущность изобретения поясняется чертежом, где на фиг. 1 представлен возможный вариант построения устройства для моделирования процесса функционирования средств противовоздушной обороны, который содержит:
1. блок ввода исходных данных;
2. генератор случайных чисел;
3. блок расчета радиуса;
4. блок расчета начальных координат;
5. блок расчета граничного угла и высоты;
6. блок определения координат полета;
7. блок определения нахождения;
8. блок обнаружения;
9. блок выбора и наведения;
10. блок интерфейса.
Работает устройство для моделирования процесса функционирования средств противовоздушной обороны следующим образом: в блок ввода исходных данных, вводят следующие параметры: N - количество назначенных крылатых ракет большой дальности для поражения; М - количество средство противовоздушной обороны; xm - координаты центра m-го средства противовоздушной обороны, по оси абсцисс; ym - координаты центра m-го средства противовоздушной обороны, по оси ординат; m - номер средства противовоздушной обороны; Hmax - максимальная высота обнаружения крылатых ракет большой дальности средствами противовоздушной обороны; Dimax - максимальная дальность обнаружения крылатых ракет большой дальности в пределах углов от εmin до ε0; εmin - минимальный угол обнаружения крылатых ракет большой дальности средствами противовоздушной обороны; εmax - максимальный угол обнаружения крылатых ракеты большой дальности средствами противовоздушной обороны; t - время, необходимое на пуск одной противоракеты; РпорПВО - вероятность поражения одной противоракетой.
После, генератором случайных чисел, генерируются случайные числа, равномерно распределенные на интервале [0; 1].
В блоке расчета радиуса, осуществляется вычисление радиус зоны «появления» крылатых ракет большой дальности (Rkp), путем вычисления центра фигуры А, образуемой средствами противовоздушной обороны, в соответствии с выражением:
где, xc - координаты центра фигуры А, по оси абсцисс;
ус - координаты центра фигуры А, по оси ординат;
xm - координаты центра m-го средства противовоздушной обороны, по оси абсцисс;
ym - координаты центра m-го средства противовоздушной обороны, по оси ординат;
М - количество средств противовоздушной обороны;
m - номер средства противовоздушной обороны.
вычисляется расстояние от точки А до дальнего средства противовоздушной обороны, в соответствии с выражением:
где, хс - координаты центра фигуры А, по оси абсцисс;
ус - координаты центра фигуры А, по оси ординат;
xm - координаты центра m-го средства противовоздушной обороны, по оси абсцисс;
ym - координаты центра m-го средства противовоздушной обороны, по оси ординат;
М - количество средство противовоздушной обороны;
m - номер средства противовоздушной обороны, после чего вычисляется зона «появления» крылатых ракет большой дальности, в соответствии со следующим выражением:
где, L - расстояние от точки а до дальнего средства противовоздушной обороны.
В блоке расчета начальных координат происходит вычисление полярных углов появления крылатых ракет большой дальности, в соответствии с выражением:

где, α1, - полярный угол появления крылатой ракет большой дальности;
n - номер крылатой ракеты большой дальности;
Rndn - случайное число в интервале [0; 1].
вычисляются декартовы координаты для всех крылатых ракет большой дальности с точкой начала отсчета в центре позиционного района соединения подвижных грунтовых ракетных комплексов, в соответствии с выражением:
где, α1 - полярный угол появления крылатой ракеты большой дальности;
хс - координаты центра фигуры А, по оси абсцисс;
ус - координаты центра фигуры А, по оси ординат;
n - номер крылатой ракеты большой дальности;
RKP - радиус круга зоны «появления» крылатой ракеты большой дальности.
В блоке расчета граничного угла и высоты, происходит вычисление нижнего граничного угла изовысотного участка и максимальной высоты обнаружения крылатых ракет большой дальности, в соответствии с выражением:

где D0 - максимальная дальность обнаружения при угла от ε0 до εmax
ε - угол между горизонтом и направлением на крылатую ракету большой дальности средства противовоздушной обороны.
В блоке определения координат полета, формируется массив векторов координат полета всех крылатых ракет большой дальности до назначенных им для поражения подвижных объектов.
После чего, в блоке определения нахождения, для каждой крылатой ракеты большой дальности определяется, находиться ли она в зоне обнаружения средствами противовоздушной обороны, путем вычисления расстояние от всех средств противовоздушной обороны до всех крылатых ракет большой дальности, в соответствии с выражением:

где, m - номер средства противовоздушной обороны;
n - номер крылатой ракеты большой дальности.
i - модельное время.
для каждой крылатой ракеты большой дальности вычисляются углы нахождения относительно всех противовоздушной обороны, в соответствии с выражением:
где,  - расстояние от всех средств противовоздушной обороны до всех крылатых ракет большой дальности;
- расстояние от всех средств противовоздушной обороны до всех крылатых ракет большой дальности;
n - номер крылатой ракеты большой дальности.
после чего для всех крылатых ракет большой дальности вычисляется максимально возможное расстояние обнаружения всеми противовоздушной обороны, в соответствии с выражением:
заполняется матрица, состоящая из крылатых ракеты большой дальности, вошедших в зону доступную для обнаружения |R|=||rnm||, определяется их количество, в согласно критерию:
где, N - количество назначенных крылатых ракет большой дальности;
М - количество средство противовоздушной обороны;
m - номер средства противовоздушной обороны;
n - номер крылатой ракеты большой дальности.
В блоке обнаружения, моделируется факт обнаружения, для крылатых ракет большой дальности, находящихся в зоне обнаружения средствами противовоздушной обороны, после чего проверяется факт обнаружения крылатых ракет большой дальности средствами противовоздушной обороны, заполняется вектор обнаружения  согласно критерия
согласно критерия
В блоке выбора и наведения, происходит присваивание значения i=i+1, и проверка выполнения следующего условия:
где Iокон - время окончание моделирования.
если условие не выполняется, то возвращаемся в блок определения координат полета; а если выполняется тогда для каждой крылатой ракеты большой дальности производиться определение количества модельного времени проведенного в зоне обстрела (оно соответствует значением в вектор обнаружения ).
После чего, происходит расчет количества запущенных противоракет, в соответствии с выражением:
где е - количество противоракет;
t - время, необходимое на пуск одной противоракеты происходит расчет вероятности поражения крылатой ракеты большой дальности, в соответствии с выражением:

где, РпорПВО - вероятность поражения одной противоракетой;
е - количество противоракет.
В блоке интерфейса рассчитывается математическое ожидание всех вероятностей не поражения, в соответствии с выражением:
после чего выводиться визуальное отображение моделируемого процесса.
В устройстве для моделирования процесса функционирования средств противовоздушной обороны, при построении модели применяются следующие допущения:
- наносится массированный удар крылатыми ракетами большой дальности по подвижным объектам соединения подвижных грунтовых ракетных комплексов;
- подлет крылатых ракет большой дальности к подвижным объектам назначенным противником для поражения происходит в короткий промежуток времени;
- схема удара предполагает подлет к подвижным объектам отдельных крылатых ракет большой дальности с разных сторон;
- соединение подвижных грунтовых ракетных комплексов находится в высших степенях боевой готовности в рассредоточенном боевом порядке;
- часть подвижных объектов соединения подвижных грунтовых ракетных комплексов прикрыта средствами противовоздушной обороны;
- данные средства обстреливают все цели попавшие в зону их поражения;
- атакующие крылатые ракеты большой дальности не назначаются на средства противовоздушной обороны;
- движение крылатых ракет большой дальности происходит по случайным маршрутам к назначенным им для поражения подвижным объектам;
- маршруты полета находится на высоте около 50 метров над поверхностью;
- на расстоянии от 7 до 30 км перед ударом по подвижным объектам крылатые ракеты большой дальности совершают терминальный маневр;
- средства противовоздушной обороны находятся на заданных позициях и ведут непрерывный обзор воздушного пространства штатными средствами;
- при обнаружении крылатых ракет большой дальности радар сопровождения средства противовоздушной обороны наводится на самую опасную из них;
- если радар сопровождения средств противовоздушной обороны захватывает несколько крылатых ракет большой дальности, то их обстрел ведется параллельно, в противном последовательно, начиная с самой опасной.
Указанная последовательность моделирования процесса функционирования средств противовоздушной обороны реализуется следующим образом, при запуске устройства от внешнего источника, не показанного на чертеже, в блок ввода исходных данных (1), вводят следующие параметры: N - количество назначенных крылатых ракет большой дальности; М - количество средство Противовоздушной Обороны; xm - координаты центра m-го средства противовоздушной обороны, по оси абсцисс; ym - координаты центра m-го средства противовоздушной обороны, по оси ординат; m - номер средства противовоздушной обороны; Hmax - максимальная высота обнаружения крылатых ракет большой дальности средствами противовоздушной обороны; Dmax - максимальная дальность обнаружения на изовысотном участке; εmin - минимальный угол обнаружения; εmax - максимальный угол обнаружения; t - время, необходимое на пуск одной противоракеты; РпорПВО - вероятность поражения одной противоракетой. Из первого выхода блока ввода исходных данных (1) на вход генератора случайных чисел (2), подается 3 параметра: N; РпорПВО; t. Из второго выхода блока ввода исходных данных (1), на второй вход блока расчета начальных координат (4), подается 3 параметра: N, εmin, εmax. Из третьего выхода блока ввода исходных данных (1), на вход блока расчета радиуса (3), подаются 4 параметра: М, xm, ym, m. Из четвертого выхода блока ввода исходных данных (1), на вход блока расчета граничного угла и высоты (5), подаются 3 параметра: Hmax, Dmax, М. Из первого выхода генератора случайных чисел (2) на вход блока расчета начальных координат (4), подается N-e количество случайных чисел (Rndn) равномерно распределенных на интервале [0; 1]. Из блока расчета радиуса (3) на третий входом блока расчета начальных координат (4), подаются 3 параметра: хс, ус, RKP. Из блока расчета начальных координат (4) на вход блока определения координат полета (6), подаются 5 параметров: у1, х1, N, εmin, εmax. Из блока расчета граничного угла и высоты (5), на вторым вход блока определения нахождения (7), подаются 3 параметра: ε0, М, Dmax. Из блока определения координат полета (6), на первый вход блока определения нахождения (7), подаются 4 параметров: N, h, εmin, εmax. Из блока определения нахождения (7), на первый вход блока обнаружения (8), подается параметр (F) и матрица ||rnm||. Из второго выхода генератора случайных чисел (2) на второй вход блока обнаружения (8), подается N-e количество случайных чисел (Rndn) равномерно распределенных на интервале [0; 1] и 2 параметра: РпорПВО; t. Из блока обнаружения (8), на вход блока выбора и наведения (9) подаются 2 параметра: РпорПВО; t. Из блока выбора и наведения (9), на вход блока интерфейса (10), подается 1 параметр: РпорКРБД.
Таким образом, благодаря введению новых элементов и связей достигается требуемый технический результат - расширение функциональных возможностей за счет моделирования процесса обнаружения, выбора, наведения и поражения атакующих средств высокоточного оружия, системами противовоздушной обороны, позволяющее проводить исследования возможностей средств противовоздушной обороны по прикрытию элементов боевого порядка ракетной дивизии подвижных грунтовых ракетных комплексов от средств высокоточного оружия.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. SU №855667 1981 г.
2. SU №1241251 1986 г.
3. RU 146672 2014 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования каталога результатов моделирования процесса функционирования средств противовоздушной обороны | 2021 |
|
RU2758248C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ И СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2004 |
|
RU2280265C2 |
| Устройство для определения оптимального размещения средств объектовой противовоздушной обороны в позиционном районе соединения подвижных грунтовых ракетных комплексов | 2020 |
|
RU2756832C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2208213C1 |
| МОБИЛЬНЫЙ ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2003 |
|
RU2253820C2 |
| ПРОТИВОКОРАБЕЛЬНАЯ РАКЕТА | 2011 |
|
RU2477832C2 |
| СПОСОБ АДАПТИВНО-МАРШРУТНОГО УПРАВЛЕНИЯ ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2568161C2 |
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОРАКЕТЫ НА СВЕРХЗВУКОВУЮ ЦЕЛЬ | 2022 |
|
RU2825905C2 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ЗАЛПОМ АТМОСФЕРНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2691233C2 |
| СПОСОБ ПРЕОДОЛЕНИЯ ВЫСОКОСКОРОСТНЫМ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ (ВБЛА) ЗОН ПОРАЖЕНИЯ ПРОТИВОРАКЕТНОЙ И (ИЛИ) ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ | 2020 |
|
RU2730083C1 |
Изобретение относится к области моделирования процесса средств противовоздушной обороны и может быть использовано в устройствах вычислительной техники для исследований возможностей средств противовоздушной обороны по прикрытию подвижных грунтовых ракетных комплексов от средств высокоточного оружия, использующих различные характеристики. Устройство содержит блок ввода исходных данных, генератор случайных чисел, блок расчета радиуса, блок расчета начальных координат, блок расчета граничного угла и высоты, блок определения координат полета, блок определения нахождения, блок обнаружения, блок выбора и наведения и блок интерфейса. 1 ил.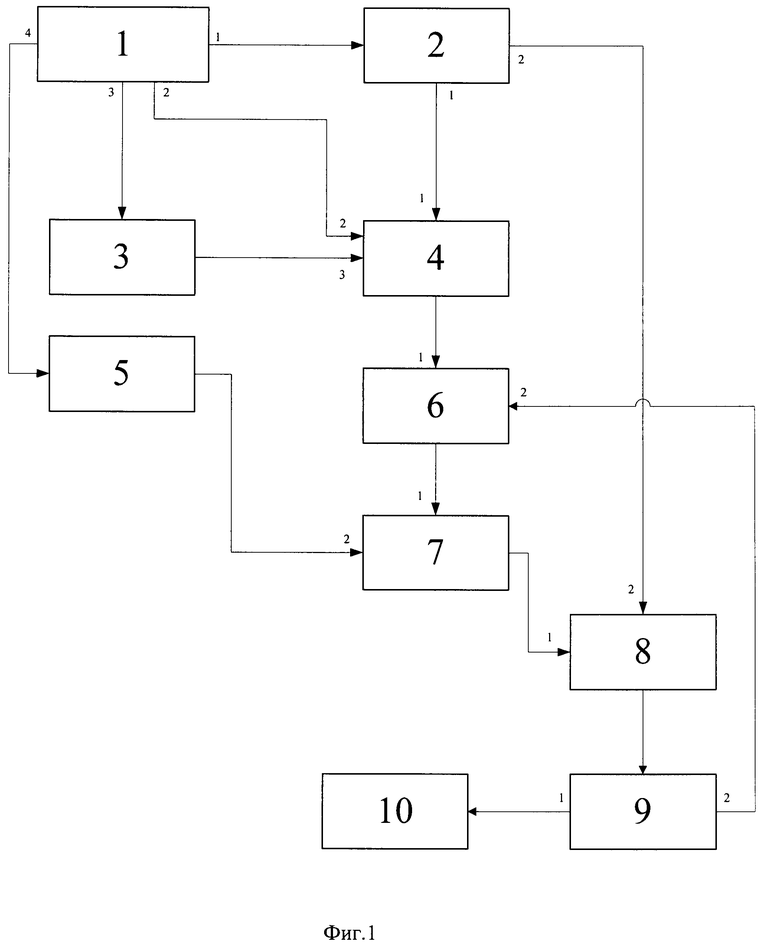
Устройство для моделирования процесса функционирования средств противовоздушной обороны, содержащее блок ввода исходных данных, генератор случайных чисел, блок расчета радиуса, блок расчета начальных координат, блок расчета граничного угла и высоты, блок определения координат полета, блок определения нахождения, блок обнаружения, блок выбора и наведения, блок интерфейса, при этом первый выход блока ввода исходных данных (1) соединен с входом генератора случайных чисел (2), второй выход блока ввода исходных данных (1) соединен со вторым входом блока расчета начальных координат (4), третий выход блока ввода исходных данных (1) соединен со входом блока расчета радиуса (3), четвертый выход блока ввода исходных данных (1) соединен со входом блока расчета граничного угла и высоты (5), первый выход генератора случайных чисел (2) соединен с первым входом блока расчета начальных координат (4), выход блока расчета радиуса (3) соединен с третьим входом блока расчета начальных координат (4), выход которого соединен с первым входом блока определения координат полета (6), выход блока расчета граничного угла и высоты (5) соединен со вторым входом блока определения нахождения (7), выход блока определения координат полета (6) соединен с первым входом блока определения нахождения (7), выход которого соединен с первым входом блока обнаружения (8), второй выход генератора случайных чисел (2) соединен со вторым входом блока обнаружения (8), выход которого соединен с входом блока выбора и наведения (9), второй выход блока выбора и наведения (9) соединен со вторым входом блока определения координат полета (6), первый выход блока выбора и наведения (9) соединен с блоком интерфейса (10) устройства, позволяющим применять его в электронном моделировании для исследования процессов функционирования реальных систем противовоздушной обороны.
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ЭФФЕКТИВНОСТИ ВОЙСК ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ ОПЕРАТИВНОГО УРОВНЯ | 2014 |
|
RU2585724C2 |
| Непроволочное безындуктивное сопротивление | 1959 |
|
SU126168A1 |
| FR 3063554 A1, 07.09.2018 | |||
| KR 20140112621 A, 24.09.2014. | |||

