Изобретение относится к радиолокации и может использоваться в радиотехнических системах для определения собственных координат летательного аппарата по формируемому в процессе полета радиолокационному изображению (РЛИ).
Известен способ (аналог) определения координат летательного аппарата (ЛА) по РЛИ относительно взлетно-посадочной полосы (ВПП) при его заходе на посадку [1. Антипов В.Н., Колтышев Е.Е., Мухин В.В., Печенников А.В., Фролов А.Ю., Янковский ВТ. Радиолокационная система беспилотного летательного аппарата. Радиотехника, 2006. №7. С. 14-20], заключающийся в том, что слева и справа относительно ВПП устанавливают маяки-ответчики пассивного или активного типа и по их отметкам на формируемых в процессе захода на посадку РЛИ осуществляют определение расстояния от летательного аппарата до каждого маяка с последующим вычислением относительных координат летательного аппарата.
Недостаток способа заключается в необходимости установки антенных систем с обоих бортов носителя для получения РЛИ слева и справа относительно направления полета, что обусловливает усложнение конструкции радиолокационной системы, а также невозможность определения координат ЛА при значительном удалении от ВПП.
Наиболее близким по технической сущности и достигаемому техническому результату является способ (прототип) навигации летательного аппарата по радиолокационным изображениям земной поверхности [2. Патент RU №2564552, МПК G01S 13/90, опубликовано 10.10.2015], основанный на том, что задают опорные участки местности, по которым в процессе полета ЛА будет осуществляться определение координат, формируют их эталонные радиолокационные или оптические изображения и вводят в навигационный комплекс. При подлете ЛА к заданному опорному участку местности с помощью установленной на борту РЛС с синтезированной апертурой антенны (РСА) осуществляют зондирование, прием сигналов, формирование кадра первичного РЛИ опорного участка местности путем сжатия сигналов по дальности (получения дальностных портретов) и азимуту, определяют высоту полета ЛА, с использованием которой выполняют преобразование кадра первичного РЛИ из системы координат «доплеровская частота - наклонная дальность» в нормальную земную систему координат, осуществляют сопоставление эталонного и преобразованного РЛИ опорного участка местности путем нахождения их двумерной взаимнокорреляционной функции, по найденному положению максимума которой вычисляют координаты ЛА. При этом для определения высоты полета ЛА априорно задают множество значений высот полета ЛА, для каждого значения из этого множества производят преобразование сформированного первичного РЛИ опорного участка местности из системы координат «доплеровская частота - наклонная дальность» в нормальную земную систему координат и находят значение максимума двумерной взаимно корреляционной функции эталонного изображения и преобразованного РЛИ опорного участка местности, в качестве оценки высоты полета ЛА принимают ту, при которой величина максимума двумерной взаимно корреляционной функции является наибольшей.
Недостатком способа прототипа является низкая точность определения координат ЛА, обусловленная косвенным методом измерения высоты, а также большие временные затраты, связанные с необходимостью выполнения преобразований координат первичного РЛИ опорного участка местности для каждого значения высоты из заданного множества.
Технический результат данного изобретения состоит в увеличении точности определения координат ЛА и повышении оперативности формирования оценок координат ЛА за счет непосредственного измерения его высоты полета с помощью РСА по сигналам отражений от поверхности, расположенной под ЛА (сигналам надирных отражений).
Технический результат достигается тем, что осуществляют зондирование, прием сигналов, формирование в каждом периоде зондирования дальностного портрета, запоминание дальностных портретов в течение времени синтезирования апертуры и формирование на их основе кадра первичного РЛИ опорного участка местности, определение высоты полета ЛА, с использованием которой выполняют преобразование кадра первичного РЛИ из системы координат «доплеровская частота - наклонная дальность» в нормальную земную систему координат, осуществляют сопоставление эталонного изображения и преобразованного РЛИ опорного участка местности путем нахождения их двумерной взаимно корреляционной функции, по найденному положению максимума которой вычисляют координаты ЛА, согласно изобретению дополнительно формируют усредненный дальностный портрет путем межпериодного усреднения огибающих дальностных портретов, запомненных за время синтезирования, рассчитывают величину порога исходя из среднего уровня собственных шумов приемника и заданного уровня ложной тревоги, на усредненном дальностном портрете определяют положение фронта выброса с наименьшей дальностью, превысившего порог, которое принимают за высоту полета ЛА.
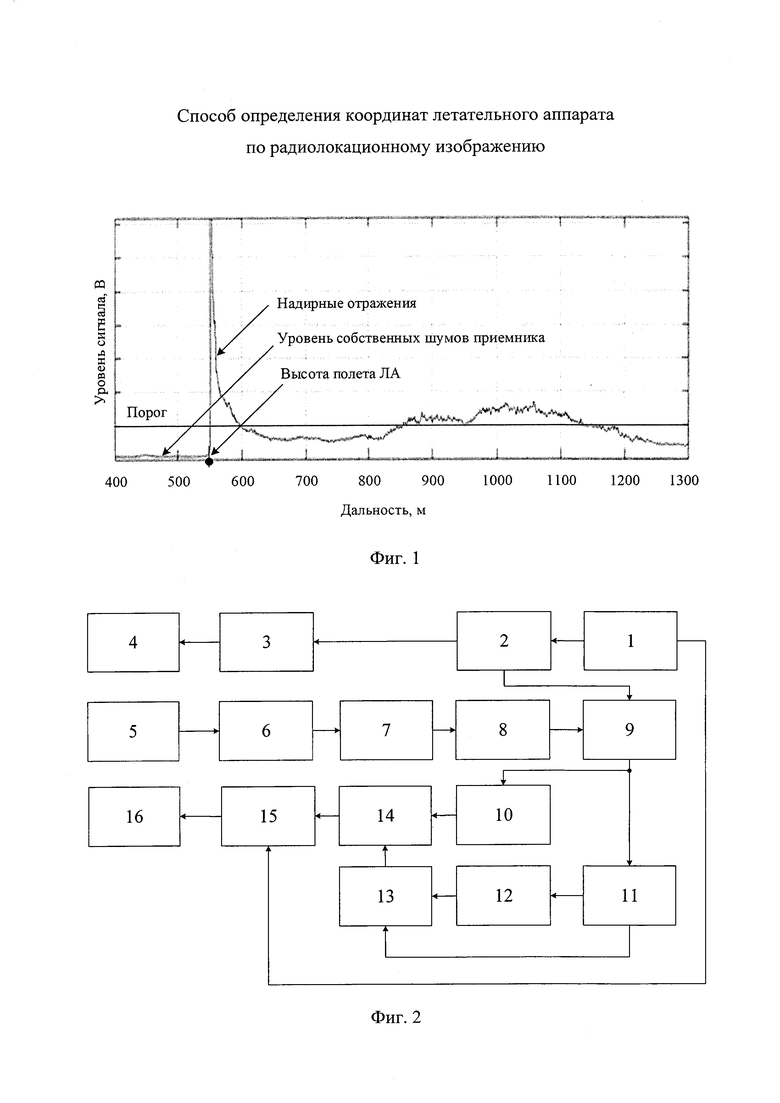
В изобретении высота полета ЛА измеряется непосредственно по сигналам надирных отражений (характеризующихся минимальной временной задержкой), которые поступают на вход приемного устройства по боковым лепесткам диаграммы направленности приемной антенны (фигура 1). Для повышения точности измерения высоты полета ЛА осуществляют некогерентное усреднение сигналов дальностных портретов, полученных за время синтезирования апертуры [3. Справочник по радиолокации / Под ред. М.И. Сколника. Пер. с англ. под общей ред. B.C. Вербы. Книга 2. М.: Техносфера, 2015. Стр. 906]. Полученный сигнал усредненного дальностного портрета сравнивают с заданным порогом, тем самым осуществляют обнаружение на нем выброса сигнала надирных отражений. Значение порога выбирают исходя из заданного уровня ложной тревоги и среднего уровня собственных шумов приемного устройства [4. Теоретические основы радиолокации. Под ред. Ширмана Я.Д. М.: «Советское радио», 1970. стр. 92]. Положение фронта выброса сигнала надирных отражений на усредненном дальностном портрете соответствует высоте полета ЛА. Повышение точности измерения высоты обеспечивает повышение точности преобразования кадра первичного РЛИ из системы координат «доплеровская частота - наклонная дальность» в нормальную земную систему координат, что, в свою очередь, повышает точность сопоставления эталонного изображения и преобразованного РЛИ опорного участка местности и, как следствие, определения координат ЛА. Повышение оперативности формирования оценок координат ЛА обеспечивается за счет существенного снижения объема вычислений.
Способ может быть реализован с помощью устройства, изображенного на фигуре 2.
Устройство состоит из бортового навигационного комплекса 1, синхронизатора 2, передающего устройства 3, передающей антенны 4, приемной антенны 5, приемника 6, аналого-цифрового преобразователя 7, блока формирования дальностных портретов 8, запоминающего устройства 9, блока формирования первичных РЛИ 10, блока усреднения дальностных портретов 11, порогового устройства 12, блока вычисления высоты полета ЛА 13, блока преобразования первичных РЛИ из системы координат «доплеровская частота - наклонная дальность» в нормальную земную систему координат 14, блока вычисления максимума двумерной взаимно корреляционной функции эталонного и преобразованного РЛИ 15, блока определения координат ЛА 16,
Устройство функционирует следующим образом. По команде от бортового навигационного комплекса 1 осуществляется включение синхронизатора 2, который запускает на время синтезирования апертуры антенны передающее устройство 3. Передающее устройство 3 формирует зондирующий сигнал, который излучается в пространство передающей антенной 4. Отраженный от поверхности сигнал принимается приемной антенной 5, усиливается в приемнике 6, оцифровывается аналого-цифровым преобразователем 7, сжимается по дальности в блоке формирования дальностных портретов 8 и записывается в запоминающее устройство 9.
По окончании времени синтезирования апертуры синхронизатор 2 выключает передающее устройство 3 и выдает на запоминающее устройство 9 сигнал, по которому запомненные отсчеты дальностного портрета выдаются одновременно на блок формирования первичных РЛИ 10 и блок усреднения дальностных портретов 11. В блоке формирования первичных РЛИ 10 выполняются операции фокусировки и сжатия по азимуту, результатом которых является первичное РЛИ наблюдаемого участка поверхности. В блоке усреднения дальностных портретов 11 осуществляется межпериодное усреднение путем суммирования огибающих сформированных за время синтезирования апертуры дальностных портретов.
Полученные отсчеты усредненного дальностного портрета и их номера последовательно выдаются из блока усреднения дальностных портретов 11 на пороговое устройство 12 и блок вычисления высоты полета ЛА 13 соответственно. Пороговое устройство 12 сравнивает поступающие на него значения отсчетов с порогом (значение порога может быть задано на этапе производства аппаратуры на основе значений уровня собственных шумов приемного устройства и уровня ложной тревоги) и при его превышении выдает сигнал на вход блока вычисления высоты полета ЛА 13, который фиксирует номер отсчета усредненного дальностного портрета (положение фронта выброса с наименьшей дальностью) и вычисляет высоту полета ЛА в соответствии с выражением h=Rmin+(Rmax-Rmin)n/N, где Rmin, Rmax - значения минимальной и максимальной дальности на дальностном портрете; n - номер отсчета усредненного дальностного портрета, превысившего порог; N - количество отсчетов в усредненном дальностном портрете.
Вычисленное значение высоты полета ЛА выдается в блок преобразования первичных РЛИ из системы координат «доплеровская частота - наклонная дальность» в нормальную земную систему координат 14.
Из блока 14 преобразованные РЛИ, представленные в нормальной земной системе координат, поступают в блок вычисления максимума двумерной взаимно корреляционной функции эталонного и преобразованного РЛИ 15, в котором вычисляется двумерная взаимно корреляционная функция преобразованного РЛИ и поступающего из бортового навигационного комплекса 1 эталонного изображения наблюдаемого опорного участка местности с последующим определением координат положения ее максимума. Координаты максимума передаются в блок 16, по которым определяются координаты ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2022 |
|
RU2801361C1 |
| Способ формирования изображения земной поверхности в радиолокационной станции с синтезированием апертуры антенны | 2016 |
|
RU2614041C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2564552C1 |
| СПОСОБ ОЦЕНКИ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2499279C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ С ПРЕДВАРИТЕЛЬНОЙ ФОКУСИРОВКОЙ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2021 |
|
RU2792964C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
Изобретение относится к радиолокации и может использоваться в радиотехнических системах для определения собственных координат летательного аппарата по формируемому в процессе полета радиолокационному изображению. Достигаемый технический результат - увеличение точности и оперативности определения координат летательного аппарата (ЛА) за счет непосредственного измерения высоты полета с помощью радиолокационной станции с синтезированной апертурой антенны, установленной на его борту. Указанный результат достигается тем, что высота полета ЛА измеряется непосредственно по сигналам надирных отражений, которые поступают на вход приемного устройства по боковым лепесткам диаграммы направленности приемной антенны. Для повышения точности измерения высоты полета ЛА осуществляют некогерентное усреднение сигналов дальностных портретов, полученных за время синтезирования апертуры. Полученный сигнал усредненного дальностного портрета сравнивают с заданным порогом, тем самым осуществляют обнаружение выброса сигнала надирных отражений. Значение порога выбирают исходя из заданного уровня ложной тревоги и среднего уровня собственных шумов приемного устройства. Положение фронта выброса сигнала надирных отражений на усредненном дальностном портрете соответствует высоте полета ЛА. Повышение точности измерения высоты обеспечивает повышение точности преобразования кадра первичного РЛИ из системы координат «доплеровская частота - наклонная дальность» в нормальную земную систему координат, что в свою очередь повышает точность сопоставления эталонного изображения и преобразованного РЛИ опорного участка местности и, как следствие, определение координат ЛА. 2 ил.
Способ определения координат летательного аппарата по радиолокационному изображению, заключающийся в зондировании, приеме сигналов, формировании в каждом периоде зондирования дальностного портрета, запоминании дальностных портретов в течение времени синтезирования и формировании на их основе кадра первичного радиолокационного изображения опорного участка местности, определении высоты полета летательного аппарата, с использованием которой выполняют преобразование первичного радиолокационного изображения из системы координат «доплеровская частота - наклонная дальность» в нормальную земную систему координат, сопоставлении эталонного изображения и преобразованного радиолокационного изображения опорного участка местности путем нахождения их двумерной взаимно корреляционной функции, по найденному положению максимума которой вычисляют координаты летательного аппарата, отличающийся тем, что дополнительно формируют усредненный дальностный портрет путем межпериодного усреднения огибающих дальностных портретов, запомненных за время синтезирования апертуры, рассчитывают величину порога исходя из среднего уровня собственных шумов приемника и заданного уровня ложной тревоги, на усредненном дальностном портрете определяют положение фронта выброса с наименьшей дальностью, превысившего порог, которое принимают за высоту полета летательного аппарата.
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2564552C1 |
| СПОСОБ ОЦЕНКИ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2499279C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2515469C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| US 8212714 B1, 03.07.2012 | |||
| WO 2010056159 A1, 20.05.2010 | |||
| Этажная литьевая форма | 1990 |
|
SU1742084A1 |
| US 5087916 A, 11.02.1992. | |||

