Изобретение относится к космической технике и может быть использовано для проведения наблюдений с использованием космического аппарата (КА) в процессе выполнения его спусковых операций.
В процессе спуска КА должна быть погашена вся потенциальная и кинетическая энергия, уровень которой чрезвычайно высок. При спуске КА на небесные тела, лишенные атмосферы (например, Луну), гашение энергии осуществляется только активным торможением аппарата.
Данный способ управления спуском использовался при посадке КА на поверхность Луны как в нашей стране, так и за рубежом (Основы теории полета космических аппаратов, под ред. Г.С. Нариманова и М.К. Тихонравова, М., «Машиностроение», 1972).
Данный способ-аналог требует значительных энергетических затрат на его реализацию. Поэтому его не рационально применять для спуска КА на планеты, имеющие атмосферу.
При спуске КА на планеты, имеющие атмосферу, например на Землю, используется активное торможение наряду с пассивным торможением за счет аэродинамических сил. Например, при спуске транспортных кораблей «Союз» и транспортных грузовых кораблей (ТГК) «Прогресс» используется способ, взятый авторами за прототип (Навигационное обеспечение полета орбитального комплекса «Салют-6» - «Союз» - «Прогресс», И.К. Бажинов, В.П. Гаврилов, В.Д. Ястребов и др. М., «Наука», 1985). Способ-прототип включает орбитальную ориентацию КА, определение его орбиты и выдачу корректирующего импульса для реализации посадки в заданном районе. Способ-прототип в течение многих лет использовался для спуска транспортных пилотируемых кораблей «Союз» и ТГК «Прогресс» и показал свою высокую эффективность и надежность.
Вместе с тем, в последние годы появилась тенденция использования грузовых кораблей после выполнения ими своих основных функций и отделения от станции для проведения научных и прикладных задач. Ряд задач, решаемых после отделения ТГК от станции, связан с наблюдением объектов на земной поверхности аппаратурой, установленной на ТГК. Возможна и обратная задача, связанная с обеспечением наблюдения ТГК аппаратурой, установленной на земной поверхности. Очевидно, что в этих случаях требуется прохождение КА над максимальным количеством объектов на земной поверхности.
Способ-прототип не обеспечивает решения данной задачи.
Задачей, на решение которой направлено настоящее изобретение, является повышение информативности наблюдений.
Технический результат предлагаемого изобретения заключается в максимальном увеличении разрешения и количества наблюдений при прохождении КА над задаваемыми наземными точками в процессе спуска КА.
Технический результат достигается тем, что в способе управления спуском КА при проведении наблюдений, включающий построение требуемой для проведения наблюдений ориентации КА, определение параметров орбиты и выдачу корректирующего импульса на спуск КА в задаваемый момент времени, дополнительно измеряют расходы топлива КА, по которым определяют остаток топлива на борту КА, определяют направления от КА на задаваемые наземные точки и Солнце, определяют по ним и по остатку топлива на борту КА орбиту спуска, проходящую максимальное число раз над задаваемыми наземными точками и отвечающую выполнению требований к моментам времени наблюдений, к удаленности КА от задаваемых наземных точек, к светотеневой обстановке на орбите КА и в задаваемых наземных точках в моменты наблюдений, а также требованию превышения остатком топлива на борту КА суммарного расхода топлива на ориентацию и маневры орбиты спуска, при этом корректирующие импульсы на спуск КА выдают для совмещения текущей орбиты с вышеопределенной орбитой спуска КА.
Поясним предложенные в способе действия.
С использованием КА могут проводиться как наблюдения исследуемых наземных объектов аппаратурой наблюдения, размещенной на КА, так и наблюдения непосредственно самого КА аппаратурой наблюдения, размещенной на Земле (например, с наземных геофизических обсерваторий). В обоих данных случаях требуется обеспечить прохождение КА над задаваемыми наземными точками (в первом случае данные точки задают координаты исследуемых с КА наземных объектов, а во втором случае - координаты наземных обсерваторий или других объектов - местоположений аппаратуры наблюдения за КА) при выполнении задаваемых условий на наблюдения, а именно: условий на моменты времени наблюдений (например, условия на время суток наблюдений, на синхронность наблюдений с другими процессами, на последовательность и/или периодичность выполнения наблюдений при прохождении КА над различными наземными точками и т.п.), условий на удаленность КА от задаваемых наземных точек в моменты наблюдений, условий на светотеневую обстановку на орбите КА и задаваемых наземных точках в моменты наблюдений (например, условия наличия заданного уровня или отсутствия освещенности объекта/ов наблюдения и мест/а размещения аппаратуры наблюдения). При этом объем получаемой полезной информации зависит от количества выполненных наблюдений. Таким образом, для увеличения объема получаемой при наблюдениях полезной информации необходимо максимизировать количество прохождений КА над задаваемыми наземными точками при выполнении перечисленных выше условий на наблюдения.
В предлагаемом способе повышение информативности наблюдений достигается путем выполнения в полете маневров КА на спуск, при которых осуществляется понижение высоты орбиты КА, что увеличивает реализуемое при наблюдениях разрешение. При этом выполнение маневров на спуск КА также может быть подчинено определенным условиям, а именно: ограничениям на затраты энергетических ресурсов (суммарный расход топлива на ориентацию и маневры орбиты спуска должен не превышать остаток топлива на борту КА), условиям на моменты выполнения маневров (например, выполнение маневров в зонах видимости наземных измерительных или командных пунктов), требованию реализации необходимой баллистической схемы спуска КА и т.д.
Таким образом, в предлагаемом способе выбирают орбиту спуска, которая проходит максимальное число раз над задаваемыми наземными точками и отвечает выполнению вышеупомянутых требований к моментам времени наблюдений, к удаленности КА от задаваемых наземных точек, к светотеневой обстановке на орбите КА и в задаваемых наземных точках в моменты наблюдений, а также требованию превышения остатком топлива на борту КА суммарного расхода топлива на ориентацию и маневры орбиты спуска.
В зависимости от требований к условиям выполнения наблюдений могут предъявляться и различные требования к ориентации КА для реализации наблюдений. Это может быть как орбитальная ориентация КА (используется, как правило, при наблюдениях исследуемых наземных объектов с КА, при этом возможны повороты КА относительно направления полета для более точного наведения аппаратуры наблюдения на объекты наблюдения), так и инерциальная ориентация КА (например, ориентация КА относительно направления на Солнце или закрутка КА в инерциальном пространстве при проведении наблюдений КА с наземных обсерваторий, например, при проведении экспериментов по исследованию «факелов» срабатываний двигателей КА или по обнаружению/идентификации КА с наземных станций).
В предлагаемом способе наблюдения выполняются при нахождении КА на вышеупомянутой специальным образом выбранной орбите спуска, которая проходит максимальное число раз над задаваемыми наземными точками и отвечает выполнению вышеупомянутых требований к моментам времени наблюдений, к удаленности КА от задаваемых наземных точек, к светотеневой обстановке на орбите КА и в задаваемых наземных точках в моменты наблюдений, а также требованию превышения остатком топлива на борту КА суммарного расхода топлива на ориентацию и маневры орбиты спуска. При этом при нахождении данной орбиты спуска осуществляется и формирование последовательности моментов времени выполнения наблюдений (плана выполнений наблюдений), удовлетворяющих выполнению вышеупомянутых требований (требований к моментам времени наблюдений, к удаленности КА от задаваемых наземных точек, к светотеневой обстановке на орбите КА и в задаваемых наземных точках в моменты наблюдений и др.).
В качестве исходных данных для определения орбиты спуска используются результаты определения параметров орбиты КА (например, осуществляется методами радиоконтроля орбиты КА с наземных измерительных пунктов или с помощью систем спутниковой навигации), координаты задаваемых наземных точек и определяемые направления от КА на задаваемые наземные точки, определяемые параметры освещенности КА и задаваемых наземных точек (например, компоненты вектора направления на Солнце в орбитальной и/или инерциальной системах координат, высота Солнца в задаваемых наземных точках), параметры, определяющие перечисленные выше условия на проведение наблюдений, параметры, задающие остаток топлива на борту КА, параметры, определяющие технические возможности реализации маневров и построения ориентации КА, параметры, определяющие требования к баллистической схеме спуска и др.
В предлагаемом способе после определения упомянутой специальным образом выбранной орбиты спуска осуществляют действия по ее реализации, а именно, выдают корректирующие импульсы, в результате выполнения которых текущая орбита КА совмещается с вышеопределенной орбитой спуска КА. В процессе нахождения КА на упомянутой специальным образом выбранной орбите спуска реализуют выполнение наблюдений, для чего измеряют направления от КА на задаваемые наземные точки, в вышеупомянутые определенные моменты времени для выполнения наблюдений (согласно определенному плану выполнений наблюдений) осуществляют построение требуемой для проведения наблюдений ориентации КА и задействуют аппаратуру наблюдения (в том числе, включают аппаратуру наблюдения, ось чувствительности аппаратуры наблюдения наводят на объект наблюдения, сопровождают объект наблюдения, выключают аппаратуру наблюдения и т.д.).
В качестве примера рассмотрим движение КА по круговой орбите с постоянным наклонением к экватору, прецессирующей под влиянием сжатия Земли. Зададим положение плоскости орбиты КА наклонением i и долготой восходящего угла в неподвижной системе координат Ω, а положение КА в плоскости орбиты - радиусом орбиты R и аргументом u, измеряемым в оборотах (0≤u<1). Называем витком орбиты ее дугу между двумя последовательными прохождениями КА через восходящий узел орбиты, а межвитковым расстоянием d - модуль изменения долготы восходящего узла за виток в системе координат, жестко связанной с Землей, который может быть задан соотношением
d=ω3T-ΔΩ, Т=2πR3/2µ-1/2, ΔΩ=3πI2(Rэ/R)2 cos I,
здесь Т - период обращения КА, µ - гравитационный параметр, ΔΩ - изменение долготы восходящего узла за виток в абсолютной системе координат, I2=-1082,2·10-6 - коэффициент второй зональной гармоники, Rэ - экваториальный радиус Земли, ω3 - угловая скорость Земли.
Введем нумерацию витков орбиты КА, начиная с нулевого витка, для которого t0 - момент начала витка, Ω0 - долгота восходящего узла в абсолютной системе координат, f0 - долгота восходящего узла в системе координат, связанной с Землей. В качестве аргумента при описании движения КА будем использовать дробное значение витка - сумму номера витка и аргумента широты.
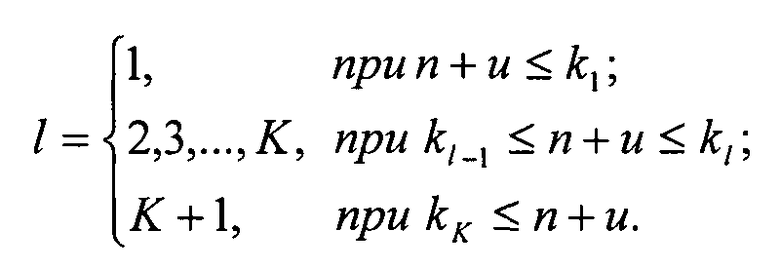
Пусть на рассматриваемом этапе полета КА допустимо провести последовательно К импульсных маневров. Обозначим через ki - номер витка на момент выполнения j-го маневра, di и di+1 - межвитковое расстояние до и после выполнения j-го маневра (j=1, …, К).
Запишем соотношение для долготы восходящего узла f в системе координат, связанной с Землей. В момент, соответствующий номеру витка n и аргументу широты u и расположенный до момента выполнения первого маневра (n+u≤k1), f рассчитывается по формуле

Пусть 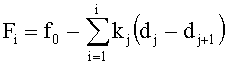

После выполнения К-го маневра (kk≤n+u) для нахождения f в последней формуле необходимо положить l=К+1.
Объединив формулы, получим, что в момент, соответствующий номеру витка n и аргументу широты u, f определяется по формуле (2), в которой
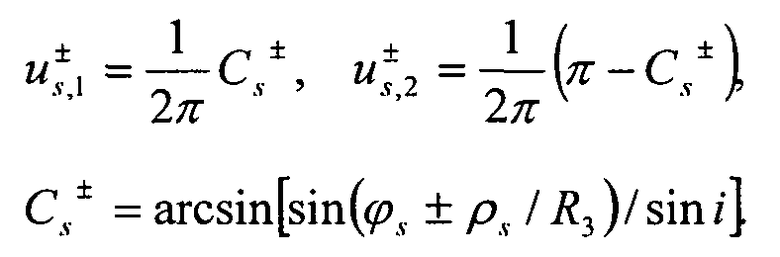
Считаем, что для проведения наблюдений задано N наземных точек (далее - наземных объектов) с географическими координатами Qs=(λs, φs), (s=1, … N). Считаем, что КА проходит над наземным объектом Qs на витке, если трасса КА на поверхности Земли проходит от наземного объекта на расстоянии, не превышающем заданную величину ρs (Землю представляем сферой радиуса R3).
Для каждого наземного объекта Qs в связанной системе координат существуют два диапазона долгот восходящих узлов 

Каждый диапазон соответствует одному из возможных случаев прохождения КА над наземным объектом: движение КА из южного полушария в северное («восходящая» дуга витка орбиты, q=1), и наоборот («нисходящая» дуга витка орбиты, q=2).
Соответственно существуют два диапазона значений аргументов широты 
КА проходит над наземным объектом Qs на некотором витке n, если для одного из q для всех аргументов широты u, 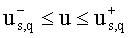

При этом аргументы широты при прохождении лежат в диапазоне 
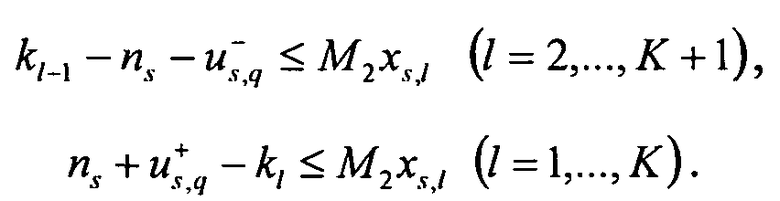
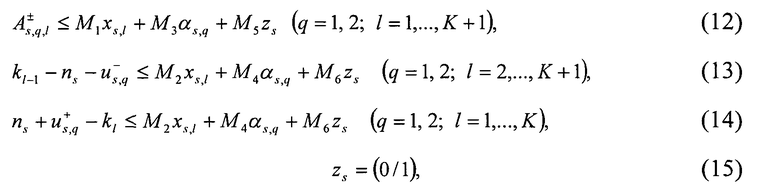
Пусть ns - номер витка прохождения КА над наземным объектом Qs (s=1, …, N). Возможны следующие случаи: прохождение реализуется до первого маневра, между маневрами l-1 и l (l=2, …, К) или после маневра К. С учетом (2) и (3) КА проходит над объектом Qs в интервале между маневрами l-1, l (l=2, …, K), если существует целое ms такое, что для одного из q (q=1, 2) выполнены условия


Диапазон возможных значений ms определяется диапазонами изменения ns, kj, dj, f0:

При этом КА проходит над наземным объектом Qs до первого маневра, если для одного из q выполнены условия (4), (6)÷(8) для l=1; а после маневра К - если для одного из q выполнены условия (4), (5), (7), (8) для l=К+1.
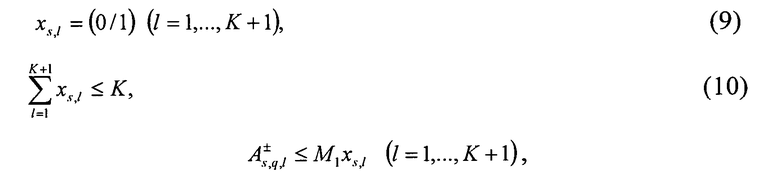
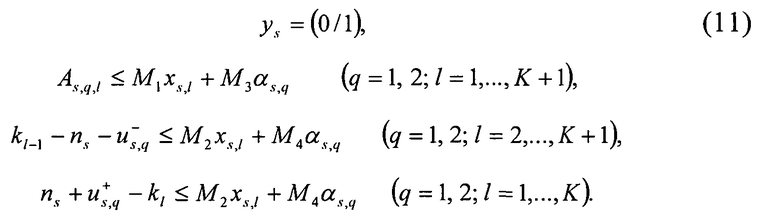
Обозначим  и введем бинарные неизвестные хs,l(s=1, …, N; l=1, …, К+1) такие, что
и введем бинарные неизвестные хs,l(s=1, …, N; l=1, …, К+1) такие, что

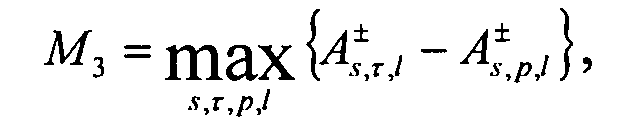
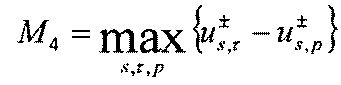
Если для некоторого l выполнены условия (4)÷(6), то для других значений l рассогласование между левыми и правыми частями неравенств (4) не превышает
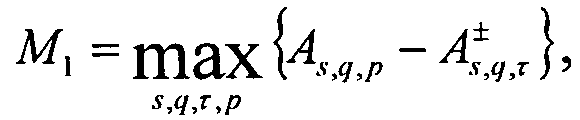
а рассогласование в (5), (6) не превышает
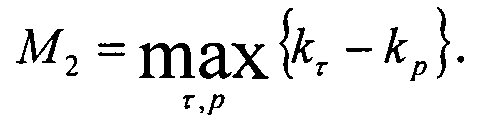
Значения M1, M2 определяются диапазонами изменения ns, kj, dj.
Можно записать, что КА проходит над наземным объектом Qs, если для одного из q наряду с (7), (8) выполнены следующие условия:
Введем бинарные неизвестные ys [s=1, …, N) такие, что

Если для одного из q выполнены условия (4)÷(6), то для другого значения q рассогласование между левыми и правыми частями неравенств (4) не превышает
а рассогласование в (5), (6) не превышает
Обозначим αs,q=q-1+(-1)q+1 ys. С учетом этого условие прохождения КА над объектом Qs формализуется в виде (7)÷(10) и условий
Введем бинарные неизвестные zs (s=1, …, N) такие, что

Для наземных объектов могут быть заданы величины Рs (s=1, …, N), характеризующие их приоритеты - чем больше ценность прохождения КА над наземным объектом, тем выше приоритет. Тогда количество прохождений КА над объектами равно 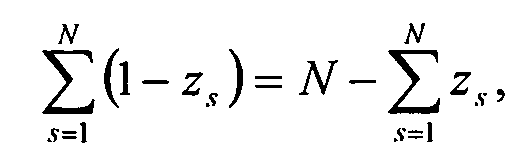 а информативность наблюдений с учетом приоритетов наземных объектов характеризуется величиной
а информативность наблюдений с учетом приоритетов наземных объектов характеризуется величиной
Для любых s и ns всегда существует ms, определяемое условиями (8), такое, что рассогласование между левыми и правыми частями неравенств (4) не превышает М5=2π, рассогласование же в (5), (6) всегда не превышает
С учетом этого требование прохождения КА над количеством объектов не менее заданного числа N0 из всего перечня объектов при информативности наблюдений не менее задаваемой величины Р0 формализуется условиями (7)÷(11), условиями
взятыми для s=1, …, N, и условиями

Требование максимизации информативности наблюдений формализуется минимизацией целевой функции

при условиях (7)÷(15) для s=1, …, N.
Для привязки витков орбиты ко времени используем заданные значения t0 и среднего периода обращения КА. Требование реализации наблюдений в заданные интервалы времени сводится к ограничениям на витке проведения наблюдений. В общем случае для каждого наземного объекта Qs задано несколько последовательных диапазонов возможных номеров витков наблюдения 
Введем бинарные неизвестные gs,ν (s=1, …, N; ν=1, …, Ns) такие, что

Тогда требование прохождения КА над объектом Qs в пределах данных диапазонов витков записывается в виде
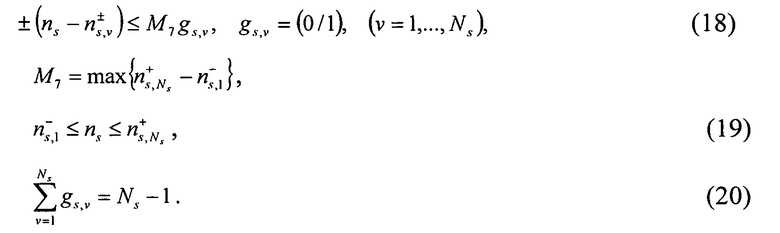
Как указывалось, при реализации наблюдений может требоваться выполнение определенных условий по светотеневой обстановке на орбите и/или подстилающей земной поверхности (в задаваемых наземных точках). Условия по светотеневой обстановке в моменты реализации наблюдений могут быть сведены к ограничениям на витки проведения наблюдений. Для этого кроме значений t0, Ω0 и среднего периода обращения КА считаем известной среднюю скорость прецессии восходящего узла в абсолютной системе координат. По данным параметрам прогнозируем взаимное расположение плоскости орбиты КА и Солнца и определяем освещенность КА и подспутниковой точки КА на всех возможных витках наблюдения. Для каждого наземного объекта Qs фиксируем номера витков и соответствующие им значения q, для которых в интервалах значений аргументов широты


Обозначим 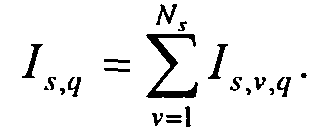 Требование реализации наблюдений при заданных светотеневых условиях записывается в виде (18), (19) и условий
Требование реализации наблюдений при заданных светотеневых условиях записывается в виде (18), (19) и условий

Для каждой пары наземных объектов (Qs, Qτ), над которыми КА должен пройти в заданной последовательности, считаем заданными величины 


Если 


Требование неоднократного прохождения КА над наземным объектом с заданной периодичностью формализуется следующим образом: данный объект несколько раз вводится в перечень наземных объектов под номерами s, s+1, …, s+p, где p - требуемое количество повторных прохождений, и для переменных ns, ns+1, …, ns+p необходимо выполнение условий прохождения КА над наземным объектом и соответствующих условий на моменты и последовательность проведения наблюдений.
В полете выполнение маневров КА подчинено определенным условиям: обычно их можно проводить лишь в определенные интервалы времени; величина импульса ограничена техническими возможностями и ресурсами топлива на борту КА и т.д. Ограничения на моменты выполнения маневров могут быть учтены аналогично временным ограничениям на моменты наблюдений. Для каждого j-го маневра задано несколько последовательных диапазонов возможных значений витков его выполнения 


Требование выполнения j-го маневра в пределах данных диапазонов витков записывается условиями
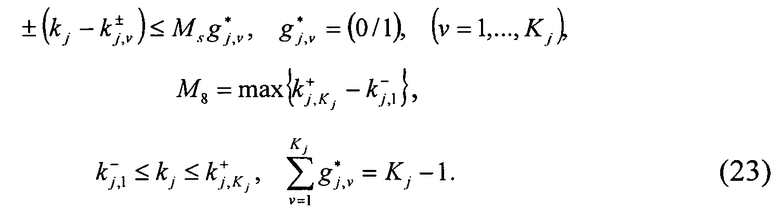
Условие последовательного выполнения маневров представляется в виде

Учитывая предположение о мгновенном изменении межвиткового расстояния при выполнении маневров, затраты на их выполнение можно оценивать величиной изменения межвиткового расстояния. Таким образом, суммарные энергозатраты на выполнение маневров характеризуются величиной 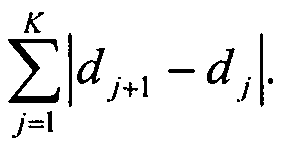
Обозначим через 

Справедливо равенство |dj+1-dj|=(dj+1-dj)(1-2ej) и ограничение на затраты ресурсов задается условиями

где D0 - величина, характеризующая максимально возможные затраты на выполнение маневров.
Требование минимизации энергозатрат на выполнение маневров формализуется минимизацией целевой функции

при условиях (25).
На значения межвитковых расстояний и значение f0 накладываются двусторонние ограничения:

где 

Для орбиты спуска требуется обеспечить итоговое понижение высоты орбиты КА, что соответствует итоговому уменьшению межвиткового расстояния. Для этого для маневра j, в результате которого необходимо строго уменьшить межвитковое расстояние, задаем 
Требования поддержания высоты орбиты КА в заданных диапазонах значений, соответствующих требуемой баллистической схеме спуска (в том числе итоговому понижению высоты орбиты) и ограничению на ресурс топлива КА, могут задаваться условиями вида (28). Если при ориентировании КА также расходуется топливо, то расход топлива на ориентацию КА может рассматриваться пропорциональным количеству сеансов наблюдений и/или суткам полета КА и может учитываться по аналогичным соотношениям (на практике расход топлива на ориентацию КА существенно меньше расхода топлива на выполнении маневров, что позволяет учесть его простым резервированием задаваемого количества топлива).
Таким образом, задача максимизации информативности наблюдений может быть формализована следующим образом: минимизировать целевую функцию вида (17) при условиях вида (7)÷(15), (18)÷(21) для s=1, …, N; (23) для j=1, …, K; (22), (24)÷(28). Может быть также сформулирована задача минимизации энергозатрат на выполнение маневров: минимизировать целевую функцию вида (27) при условиях вида (7)÷(15), (18)÷(21) для s=1, …, N; (23) для j=1, …, K; (16), (22), (24)÷(25), (28). Особенности данных задач обусловлены требованием целочисленности части переменных и нелинейностью целевых функций и функций условий.
Данные задачи решаются с использованием линейной аппроксимации нелинейных функций. Полученные линеаризованные задачи являются частично-целочисленными задачами линейного программирования, которые могут быть решены, например, методом ветвей и границ (Муртаф Б. Современное линейное программирование. М.: Мир, 1984), с использованием методов решения задач линейного программирования (например, симплекс-метода). Расчет схем выполнения полученных маневров КА может базироваться на известных методах расчета маневров и коррекций орбит КА (Лидов М.Л., Ляхова В.А. Вычислительный алгоритм импульсной коррекции при наличии ограничений. // Космич. исслед. 1970. Т.8. №4. С.501).
Отметим, что формирование исходных данных для сформулированных задач является достаточно трудоемкой задачей, поэтому на практике при определении искомой орбиты спуска КА последовательно решается несколько задач по максимизации информативности наблюдений и минимизации энергозатрат КА, при этом получаемые решения предшествующей задачи являются основой для формирования исходных данных для последующей задачи. Описанный математический подход применяется в случае достаточно большого количества наземных точек, когда определение искомой орбиты спуска без привлечения описанного математического аппарата представляется затруднительным. В противном случае определение искомой орбиты спуска может быть осуществлено на основе численного моделирования перебором возможных вариантов орбиты спуска, удовлетворяющих сформулированным условиям и ограничениям.
Опишем технический эффект предлагаемого изобретения.
Предложенный способ позволяет максимально увеличить разрешение получаемых при наблюдениях изображений и максимально увеличить количество наблюдений при прохождении КА над задаваемыми наземными точками в процессе спуска КА. При этом максимизация разрешения получаемых при наблюдениях изображений позволяет увеличить качество получаемых в результате наблюдений научных и технических данных и информации, а максимизация количества наблюдений позволяет увеличить объем получаемых в результате наблюдений научных и технических данных и информации.
Увеличение разрешения получаемых при наблюдениях изображений достигается за счет выполнения наблюдений при нахождении КА на понижающейся по высоте орбите. Увеличение количества наблюдений достигается за счет выполнения наблюдений при нахождении КА на специальным образом определенной орбите спуска, которая проходит максимальное число раз над задаваемыми наземными точками при выполнении указанных выше условий на наблюдения и маневры КА и ограничений на расход топлива КА.
При этом максимальное количество прохождений КА над задаваемыми наземными точками может определяться разнообразно: например, максимизация количества прохождений КА над максимально возможным количеством наземных точек, максимизация количества прохождений КА над каждой из задаваемых наземных точек, максимизация количества прохождений КА над задаваемыми наземными точками с обязательным прохождением КА над каждой наземной точкой, максимизация количества прохождений КА над задаваемыми наземными точками с обязательным прохождением не менее, чем заданного количества раз над каждой из не менее, чем заданного количества задаваемых наземных точек и т.д. Кроме того, как отмечалось выше, при суммировании количества прохождений КА над задаваемыми наземными точками могут учитываться их приоритеты. Например, значение приоритета прохождения над наземной точкой может рассматриваться как число, пропорциональное важности проведения наблюдения при прохождении КА над данной наземной точкой по отношению к другим точкам.
В настоящее время технически все готово для реализации предложенного способа, например, на ТГК «Прогресс» или других КА. Система управления ТГК «Прогресс» позволяет осуществлять построение необходимой ориентации, двигательная установка ТГК обеспечивает выдачу корректирующих и тормозных импульсов. Определение параметров орбиты, измерение направлений от КА на задаваемые наземные точки и параметров освещенности КА и задаваемых наземных точек может быть выполнено с использованием известных навигационных средств. Измерение остатков топлива на борту КА может быть выполнено с использованием системы измерения расхода топлива СИРТ. Необходимые вычисления могут быть выполнены с использованием бортовых вычислительных средств КА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАБЛЮДЕНИЯ НАЗЕМНЫХ ОБЪЕКТОВ С ДВИЖУЩЕГОСЯ ПО ОКОЛОКРУГОВОЙ ОРБИТЕ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2629694C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО ТРАНСПОРТНОГО ГРУЗОВОГО КОРАБЛЯ С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ПРОВЕДЕНИИ РАБОТ В УСЛОВИЯХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2013 |
|
RU2539266C2 |
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2729339C1 |
| МНОГОМОДУЛЬНЫЙ КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ ГЕОСТАЦИОНАРНОЙ ОРБИТЫ И СПОСОБ ОЧИСТКИ ГЕОСТАЦИОНАРНОЙ ОРБИТЫ | 2014 |
|
RU2573015C2 |
| Способ формирования группировки космических аппаратов для локального наблюдения заданной области планеты | 2017 |
|
RU2671601C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2010 |
|
RU2441821C1 |
| СПОСОБ ГРУППОВОГО ОРБИТАЛЬНОГО ДВИЖЕНИЯ ИСКУССТВЕННЫХ СПУТНИКОВ | 2011 |
|
RU2592121C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ НА ОРБИТАХ С МАКСИМАЛЬНОЙ ДЛИТЕЛЬНОСТЬЮ ТЕНЕВОГО УЧАСТКА | 2014 |
|
RU2562903C1 |
| СПОСОБ УВОДА ПРЕКРАТИВШИХ АКТИВНОЕ СУЩЕСТВОВАНИЕ КОСМИЧЕСКИХ АППАРАТОВ С РАБОЧИХ НАКЛОННЫХ И ЭКВАТОРИАЛЬНЫХ ОРБИТ В ПЛОТНЫЕ СЛОИ АТМОСФЕРЫ | 2018 |
|
RU2708406C1 |
Изобретение относится к управлению подготовкой и осуществлением спуска космического аппарата (КА). Способ включает построение требуемой для проведения наблюдений ориентации КА, определение остатка топлива на борту КА, а также орбиты спуска, проходящей максимальное число раз над заданными наземными пунктами и отвечающей требованиям светотеневой обстановки на орбите КА и в этих пунктах. Остаток топлива должен превышать суммарный его расход на ориентацию и маневры орбиты спуска. При выполнении указанных требований переводят КА на орбиту спуска. Технический результат изобретения состоит в повышении разрешения и количества наблюдений наземных пунктов при спуске КА.
Способ управления спуском космического аппарата при проведении наблюдений, включающий построение требуемой для проведения наблюдений ориентации космического аппарата, определение параметров орбиты и выдачу корректирующего импульса на спуск космического аппарата в задаваемый момент времени, отличающийся тем, что измеряют расходы топлива космического аппарата, по которым определяют остаток топлива на борту космического аппарата, определяют направления от космического аппарата на задаваемые наземные точки и Солнце, определяют по ним и по остатку топлива на борту космического аппарата орбиту спуска, проходящую максимальное число раз над задаваемыми наземными точками и отвечающую выполнению требований к моментам времени наблюдений, к удаленности космического аппарата от задаваемых наземных точек, к светотеневой обстановке на орбите космического аппарата и в задаваемых наземных точках в моменты наблюдений, а также требованию превышения остатком топлива на борту космического аппарата суммарного расхода топлива на ориентацию и маневры орбиты спуска, при этом корректирующие импульсы на спуск космического аппарата выдают для совмещения текущей орбиты с вышеопределенной орбитой спуска космического аппарата.
| СПОСОБ ДОСТАВКИ ГРУЗОВ С ПИЛОТИРУЕМЫХ ОРБИТАЛЬНЫХ СТАНЦИЙ НА ПОВЕРХНОСТЬ ЗЕМЛИ | 2008 |
|
RU2381967C1 |
| DE 4129096 A1, 04.03.1993 | |||
| US 5056740 A1, 15.10.1991 | |||
| JP 2012091682 A, 17.05.2012 | |||
| US 5853151 A1, 29.12.1998. | |||

