Изобретение относится к неразрушающему контролю и может быть использовано для дефектоскопии многослойных углепластиковых объектов.
Многослойные углепластиковые объекты состоят из однонаправленных слоев из углеродных волокон. От слоя к слою направление углеродных волокон изменяется и составляет для различных типов угол от 30° до 90°. Это обеспечивает их прочность в различных направлениях. Между собой слои соединяются компаундами на основе эпоксидной смолы. Как правило, число слоев с различным направлением волокон одинаково, что выравнивает прочностные свойства материалов в разных направлениях. Многослойные углепластиковые материалы при высокой прочности на разрыв имеют низкое сопротивление расслаиванию, возникающему при механических нагрузках типа удара. В связи с эти дефекты типа расслоение наиболее опасны для конструкций, выполненных из многослойных углепластиковых материалов.
Известен способ вихретоковой дефектоскопии многослойных углепластиковых объектов [Koyama K., Hoshikawa Н., Hirano Т. Investigation of impact damage carbon fiberrainforced plastic (CEPR) by eddy current non destructive test-ing // International Conference NDT in Canada 2011. - 2-4 November 2011, Montreal, Quebec, Canada], заключающийся в том, что возбуждают вихревые токи в многослойном углепластиковом объекте с помощью накладной катушки индуктивности с витками круглой формы, регистрируют вихретоковый сигнал с помощью измерительной катушки, с витками прямоугольной формы, размещенными симметрично относительно возбуждающей катушки в плоскости ортогональной к плоскости витков возбуждающей катушки, сканируют поверхность контролируемого объекта жестко связанными возбуждающей и измерительной катушками и по изменению вихретокового сигнала при сканировании судят о наличии и параметрах дефектов.
Известный способ направлен на выявление дефектов, связанных с разрывом волокон в одном или нескольких расположенных друг под другом слоях углепластика, возникших, например, при ударе.
Недостаток известного способа заключается в его низкой вероятности выявления дефектов типа расслоений, наиболее характерных для многослойных углепластиковых объектов. Это связано с тем, что в известном способе регистрируемый вихретоковый сигнал определяется асимметрией распределения вихревых токов относительно плоскости, проходящей через плоскость измерительной катушки. При этом реакции вихревых токов во всех слоях контролируемого участка суммируются. При наличии расслоения эта реакция изменяется весьма незначительно, так как определяется изменением расстояния соответствующих слоев от торца вихретокового преобразователя. Из-за этого удается получить сигналы только от достаточно грубых расслоений при условии, что вихретоковый преобразователь находится на их границе, а плоскость измерительной катушки ориентирована вдоль границы расслоения.
Известен способ вихретокового контроля многослойных углепластиковых объектов [Сясько В.А., Чертов Д.Н., Выявление расслоений углепластиковых материалов с использованием тангенциальных вихретоковых преобразователей // В мире неразрушающего контроля.- №2(56). - 2012. - С. 19-21.], заключающийся в том, что возбуждают в многослойном углепластиковом объекте вихревые токи с помощью прямоугольной катушки индуктивности, витки которой расположены в плоскости, ортогональной к поверхности контролируемого многослойного углепластикового объекта, регистрируют вихретоковый сигнал помощью измерительной катушки, с витками прямоугольной формы, размещенными в той же плоскости, что и витки возбуждающей катушки и симметрично относительно нее, сканируют поверхность контролируемого объекта жестко связанными возбуждающей и измерительной катушками и по изменению вихретокового сигнала при сканировании судят о наличии и параметрах дефектов.
Известный способ не обеспечивает приемлемой для практики вероятности выявления дефектов типа расслоений, из-за незначительного изменения реакции вихревых токов при их наличии. Это связано с тем, что, согласно известному способу, регистрируется суммарное изменение реакции вихревых токов во всех слоях контролируемого участка. При этом изменения вихретокового сигнала, связанные с неизбежной при сканировании вариацией рабочего зазора между рабочим торцом катушек и поверхностью контролируемого объекта, вызывают трудно подавляемые ложные сигналы.
Известен способ вихретокового контроля многослойных углепластиковых объектов, заключающийся в том, что устанавливают накладной параметрический вихретоковый преобразователь с прямоугольной катушкой индуктивности на поверхности контролируемого участка, вращают его относительно оси, проходящей через центр катушки и перпендикулярной контролируемому участку, регистрируют изменение вихретокового сигнала вносимого контролируемым объектом в зависимости от угла поворота и по полученной зависимости судят об электропроводности и направлении слоев контролируемого объекта [Н. Menana, М. 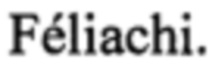 Modeling the response of a rotating eddy current sensor for the charac-terization of carbon fiber reinforced composites. European Physical Journal: Applied Physics, EDP Sciences, 2010, 52 (2)].
Modeling the response of a rotating eddy current sensor for the charac-terization of carbon fiber reinforced composites. European Physical Journal: Applied Physics, EDP Sciences, 2010, 52 (2)].
Недостаток известного способа состоит в низкой вероятности выявления дефектов типа расслоений. Это связано с тем, что изменения вихретокового сигнала, обусловленные влиянием расслоений, не могут быть надежно зарегистрированы по получаемой информации из-за слабого влияния расслоений на регистрируемый вихретоковый сигнал. Достаточно отметить, что вариация рабочего зазора между поверхностью контролируемого участка и рабочим торцом вихретокового преобразователя при его вращении может вызывать изменения вихретокового сигнала, значительно превышающие изменения вихретокового сигнала под влиянием расслоений.
Известен способ вихретокового контроля углепластиковых материалов [Patent US 5028100 A Methods for nondestructive eddy current testing of structural members with automatic characterization of faults. - G01N 27/90, 1991.], заключающийся в том, что на контролируемый участок объекта контроля (ОК) с помощью параметрического накладного вихретокового преобразователя (ВТП) воздействуют радиально неоднородным, изменяющимся во времени магнитным полем, возбуждая в ОК вихревые токи и определяя их реакцию. Реакцию вихревых токов определяют путем измерения модуля и фазы вносимых контролируемым объектом сопротивлений Zвн=Zмат-Zвозд, (Zмат - комплексное сопротивление ВТП, установленного на поверхности контролируемого объекта, - комплексное сопротивление ВТП, находящегося в воздухе, Zвн - вносимое объектом комплексное сопротивление ВТП). Измерения на каждом участке проводят на нескольких частотах и при различных, заранее определенных, угловых ориентациях радиально и азимутально неоднородных магнитных полей. Измерения рекомендуется проводить на 3-х частотах, при этом средняя частота ƒc соответствует максимальному модулю нормированной величины Zвн/Zвозд, а две другие - высшая ƒв и низшая ƒн, выбираются из соотношений ƒв=2ƒc, ƒн=0,5ƒc. Рекомендуется создавать воздействующее на ОК магнитное поле с помощью ВТП с С-образным сердечником. Такое поле является радиально и азимутально неравномерным. Рекомендуется на каждом участке ОК и на каждой из частот проводить по два измерения при ориентации радиально и азимутально неоднородного магнитного поля в двух взаимно ортогональных направлениях по углу. Изменение ориентации магнитного поля по углу рекомендуется выполнять путем поворота С-образного сердечника ВТП на 90° вокруг его оси. Для интерпретации полученных результатов измерения их сравнивают с предварительно полученными значениями Zвн на контрольных образцах с различными типовыми дефектами, а также при изменении различных влияющих факторов, в частности, рабочего зазора h между рабочим торцом ВТП и поверхностью образца. О наличии и параметрах дефектов судят по результатам сравнения.
Недостаток известного способа состоит в низкой вероятности выявления наиболее опасных дефектов типа расслоений между слоями многослойного углепластикового материала. Это связано с тем, что различие в результатах измерения, полученных на контролируемом объекте и образце, из-за их неизбежной неполной идентичности, отличаются на величину, сопоставимую с изменением вихретокового сигнала под действием опасного расслоения. Кроме того регистрируемые, вихретоковые сигналы формируются под суммарным воздействием слоев контролируемого объекта различной ориентации.
Наиболее близок к предложенному, принятый за прототип, способ вихретокового контроля однонаправленных углепластиковых материалов [Mizukami K., Mizutani Y., Todoroki A., Suzuki Y. Detection of in-plane and out-of-plane fiber waviness in unidirectional carbon fiber reinforced composites using eddy current testing // Composites Part B: Engeenering. - 2016. - vol. 86. - pp. 84-94], заключающийся в том, что выбирают вихретоковый преобразователь, состоящий из жестко связанных прямоугольных возбуждающей и двух идентичных дифференциально включенных измерительных катушек индуктивности. Катушки расположены друг за другом симметрично относительно общей плоскости. Плоскость витков возбуждающей катушки перпендикулярна плоскости рабочего торца преобразователя, а плоскости витков измерительных катушек - параллельны ему и прилегают к одной из сторон возбуждающей катушки. Возбуждающая катушка находится между измерительными катушками, симметрично относительно них. Возбуждающую катушку подключают к источнику гармонического тока, а выход одной из измерительных катушек и их дифференциальный выход - к измерительному блоку, вихретоковый преобразователь устанавливают рабочим торцом на контролируемый участок и вращают относительно проходящей через перпендикулярную к рабочему торцу ось симметрии возбуждающей катушки, регистрируют вихретоковый сигнал на выходе одной из измерительных катушек и фиксируют угловую ориентацию вихретокового преобразователя в положении, при котором достигается максимум регистрируемого сигнала. Сканируют поверхность контролируемого объекта, сохраняя полученную угловую ориентацию, регистрируют в процессе сканирования вихретоковый сигнал на выходе дифференциально включенных измерительных катушек индуктивности и по нему определяют дефектные участки с нарушением ориентации углеродных волокон.
Однако и данный способ не обладает приемлемой вероятностью выявления дефектов типа расслоения, что связано с невозможностью регистрации сигналов от расслоений с границами за зоной электромагнитного взаимодействия с вихретоковым преобразователем. Кроме того, регистрируемый с помощью данного способа дифференциальный вихретоковый сигнал при неизбежной в процессе сканирования вариации рабочего зазора изменяется на значительную величину, что затрудняет оценку параметров выявленных дефектов.
Технический результат настоящего изобретения заключается в повышении вероятности выявления дефектов типа расслоений в многослойных углепластиковых объектах с изменяющемся от слоя к слою угловым направлением углеродных волокон по заранее заданному закону.
Указанный технический результат в способе вихретокового контроля многослойных углепластиковых объектов, заключающемся в том, что возбуждают на бездефектном участке контролируемого объекта вихревые токи с помощью прямоугольной катушки индуктивности, получают вносимый ими вихретоковый сигнал U1, поворачивают катушку относительно оси, нормальной к поверхности контролируемого объекта, добиваются максимума вихретокового сигнала, размещают на заданном расстоянии относительно первой вторую катушку индуктивности, получают с ее помощью второй вносимый объектом вихретоковый сигнал U2, регистрируют разность ΔU второго и первого вихретоковых сигналов, сканируют поверхность контролируемого объекта, сохраняя угловую ориентацию и взаимное положение катушек, и используют изменение ΔU в процессе сканирования для получения информации о наличии и параметрах дефектов, достигается благодаря тому, что перед сканированием с помощью второй катушки индуктивности, идентичной первой, возбуждают в зоне контроля вихревые токи, получают вносимый ими второй вихретоковый сигнал, поворачивают вторую катушку относительно оси, нормальной к поверхности контролируемого объекта, регистрируют локальный максимум второго вихретокового сигнала U2 при угловой ориентации второй катушки, не совпадающей с ориентацией первой, и фиксируют взаимное положение первой и второй катушек при полученной для них угловой ориентации.
Дополнительно указанный технический результат в способе вихретокового контроля многослойных углепластиковых объектов достигается благодаря тому, что после фиксации углового положения катушек регулируют отношение протекающих через них токов, добиваются минимального значения величины ΔU, регистрируют вихретоковый сигнал U1 или U2, получают отношение ΔU/U1 или ΔU/U2 и по полученному отношению судят о наличии и параметрах дефектов.
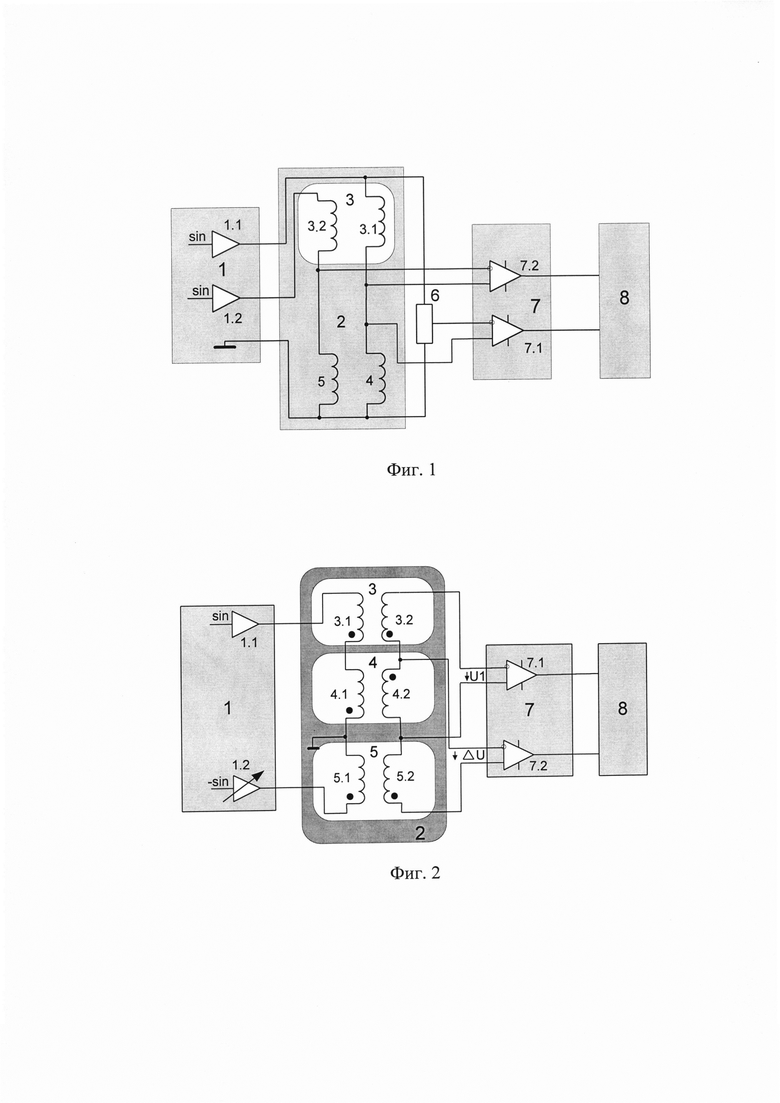
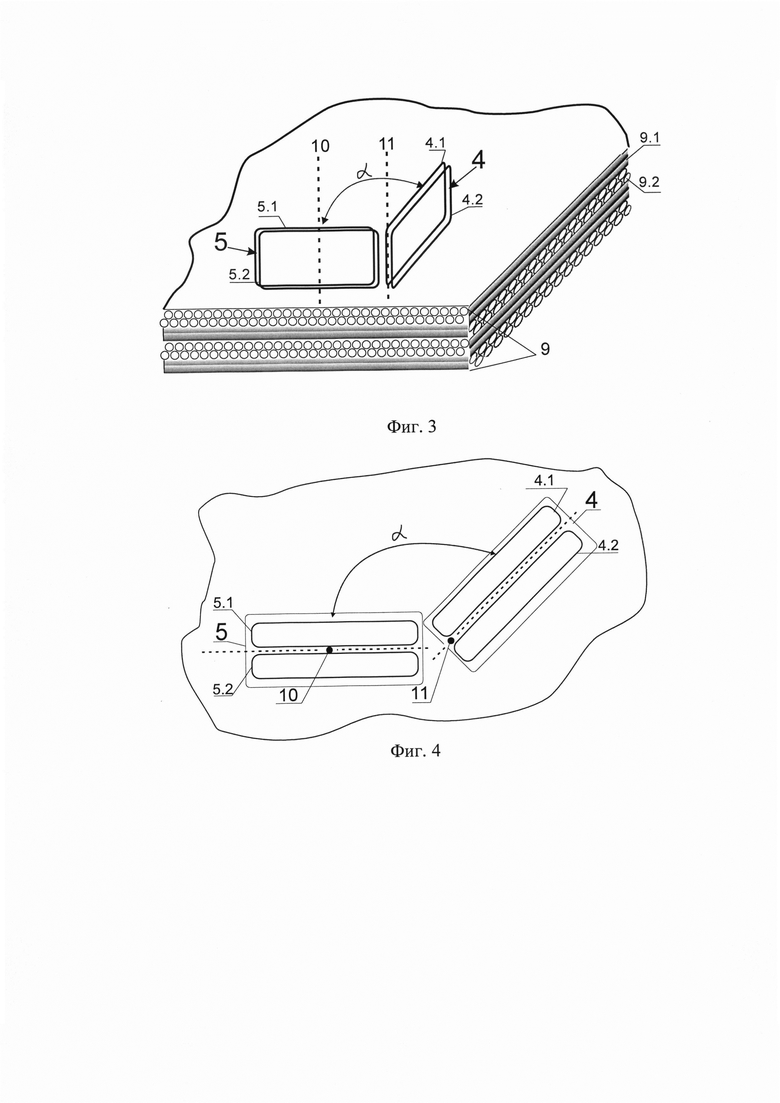
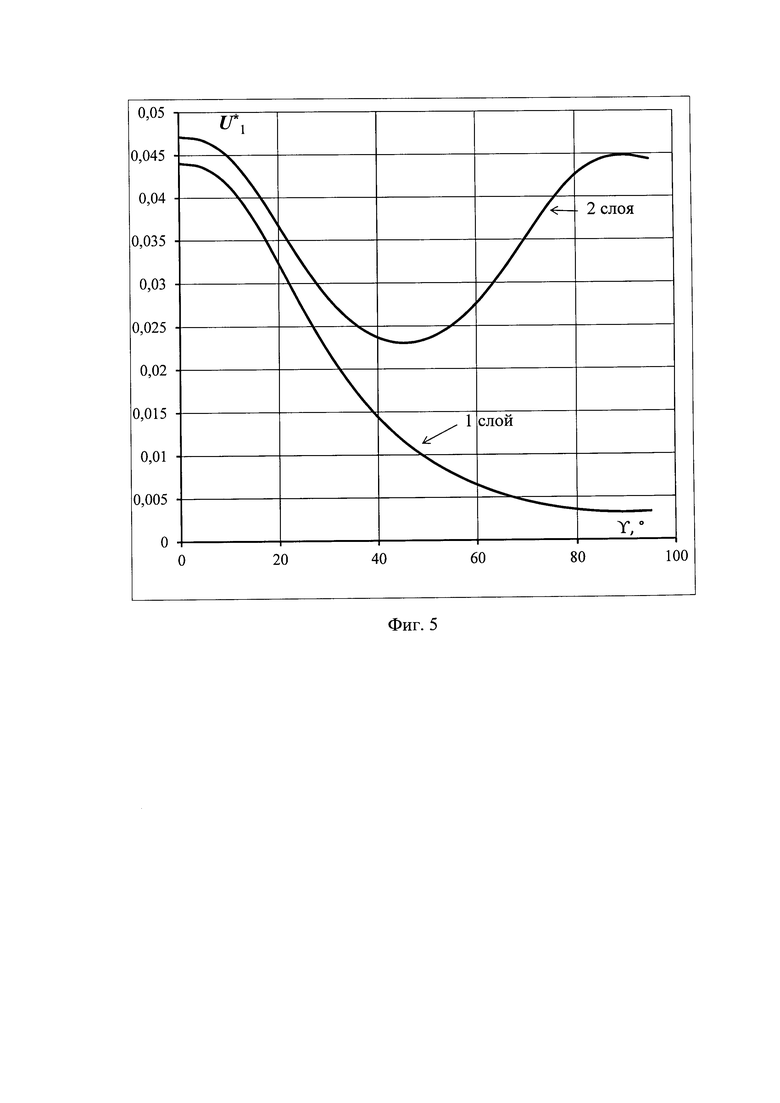
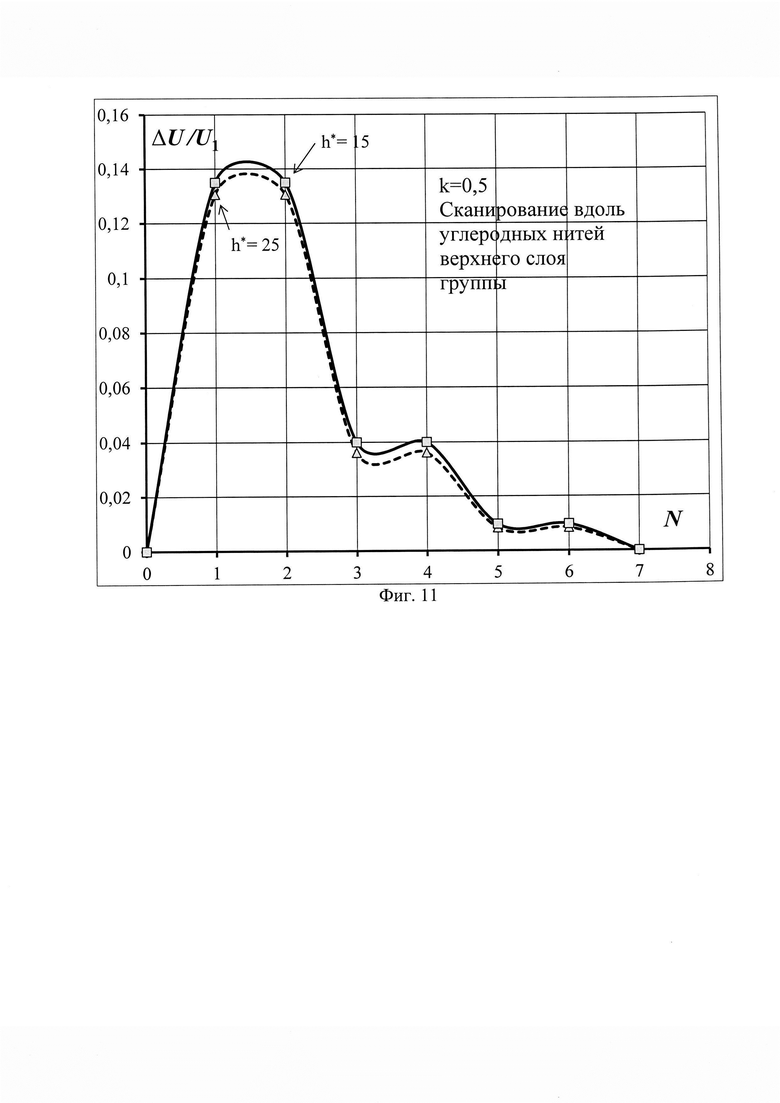
На фиг. 1 представлена измерительная схема для реализации заявляемого способа с применением катушек, совмещающих возбуждение вихревых токов и регистрацию вихретоковых сигналов по вносимым вихревыми токами в катушки параметрам (параметрический вихретоковый преобразователь). На фиг. 2 дана измерительная схема для реализации заявляемого способа при регистрации вихретоковых сигналов с помощью введенных дополнительно к возбуждающим измерительных катушек. Вихретоковые сигналы формируются по вносимым вихревыми токами в измерительные катушки напряжениям (трансформаторный вихретоковый преобразователь). На фиг. 3 показан вариант выполнения катушек индуктивности с размещением плоскости их витков в плоскостях, ортогональных к поверхности контролируемого объекта. На фиг. 4 представлен вариант выполнения катушек индуктивности с размещением плоскостей их витков в плоскостях параллельных поверхности контролируемого объекта. На фиг. 5 показана зависимость изменения вихретокового сигнала ΔU при изменении угла между ориентацией углеродных волокон и осью симметрии прямоугольной катушки, параллельной ее длинным сторонам. На фиг. 6 показано изменение вихретокового сигнала ΔU при поочередном наличии расслоения между следующими друг за другом слоями толщиной Т для нескольких значений нормированного по Т зазора h* между поверхностью контролируемого объекта и рабочим торцом вихретокового преобразователя. На фиг. 7 показано изменение сигнала ΔU для нескольких значений h* при размещении вихретокового преобразователя на границе расслоения, поочередно возникающего между разными парами слоев, когда ее линия перпендикулярна направлению сканирования, выполняемого вдоль углеродных нитей верхнего слоя группы. На фиг. 8 показано изменение сигнал ΔU для нескольких значений h* при размещении вихретокового преобразователя на границе расслоения, поочередно возникающего между разными парами слоев, когда ее линия перпендикулярна направлению сканирования, выполняемого вдоль углеродных нитей нижнего слоя группы. На фиг. 9 показано изменение нормированного по U1 вихретокового сигнала ΔU при наличии расслоения, поочередно возникающего между различными слоями, для нескольких значений h*. На фиг. 10 показано изменение нормированного по U1 сигнала ΔU для нескольких значений h* при размещении вихретокового преобразователя на границе расслоения, поочередно возникающего между разными парами слоев, с линией перпендикулярной направлению сканирования, выполняемого вдоль углеродных нитей верхнего слоя группы; на фиг. 11 показано изменение нормированного по U1 сигнала ΔU для нескольких значений h* при пересечении вихретоковым преобразователем границы расслоения, поочередно возникающего между разными парами слоев, с линией перпендикулярной направлению сканирования, выполняемого вдоль углеродных нитей нижнего слоя группы.
Предложенный способ вихретокового контроля многослойных углепластиковых объектов может быть реализован с помощью измерительной схемы, представленной на фиг. 1, в которой используется параметрический вихретоковый преобразователь. Схема содержит источник 1 гармонического тока с нерегулируемым выходом 1.1 и регулируемым выходом 1.2, вихретоковый преобразователь 2, включающий компенсационную катушку 3 индуктивности, состоящую из секций 3.1 и 3.2, рабочие катушки 4, 5 индуктивности. Схема также содержит потенциометр 6, блок 7 преобразования сигнала с двумя входами 7.1-7.2 и блок 8 представления информации, соединенный своим входом с выходом блока 7. Секции 3.1, 3.2 компенсационной катушки 3 и рабочие катушки 4,5 выполнены идентичными. Секция 3.1 подключена одним выводом к нерегулируемому выходу 1.1 и соединена через подключенную к ее другому выводу катушку 4 к выводу «земля» источника 1. Секция 3.2 подключена одним выводом к регулируемому выходу 1.1 и соединена через подключенную к ее другому выводу катушку 5 к выводу «земля» источника 1. Потенциометр 6 соединен своими внешними выводами между нерегулируемым выходом 1.1 и «землей» источника 1. Вход 7.1 блока 7 подключен первой линией к точке соединения секции 3.1 и катушки 4, а второй линией - к точке соединения секции 3.2 и катушки 5. Вход 7.2 блока 7 подключен первой линией к среднему выводу потенциометра 6, а второй линией - к точке соединения секции 3.1 и катушки 4.
Секции 3.1 и 3.2 компенсационной катушки 3 не взаимодействуют с контролируемым объектом и используются для компенсации неинформативного начального напряжения U0 на катушках 4 и 5, возникающих без взаимодействия вихретокового преобразователя 2 с контролируемым объектом. Катушка 4 используется для получения первого вихретокового сигнала U1, вносимого в нее контролируемым объектом, а также, совместно с катушкой 5 - для получения разности ΔU=U1-U2, где U2 - второй вихретоковый сигнал, вносимый контролируемым объектом в катушку 5.
Вихретоковый сигнал U1 поступает с выхода первой мостовой схемы, на первый вход блока 7 преобразования сигнала, а вихретоковый сигнал U2 - с выхода второй мостовой схемы, на второй вход блока 7 преобразования сигнала, соединенного своими выходами с блоком 8 представления информации.
При использовании трансформаторного вихретокового преобразователя 2, предложенный способ может быть реализован с помощью схемы измерения, представленной на фиг. 2. Схема содержит источник 1 гармонического тока с двумя, создаваемыми генераторами 1.1 и 1.2, гармоническими выходными токами, находящимися в противофазе. Генератор 1.2 источника 1 выполнен с возможностью регулировки величины создаваемого им тока. Схема содержит также вихретоковый преобразователь 2, состоящий из идентичных прямоугольных катушек индуктивности 3, 4 и 5, каждая из которых имеет возбуждающую обмотку - 3.1, 4.1, 5.1, соответственно, и измерительную обмотку - 3.1, 4.1, 5.1, соответственно. Возбуждающие обмотки 3.1, 4.1 и 5.1 соединены последовательно согласно и подключены внешними выводами к выходам генераторов 1.1 и 1.2, а общая точка обмоток 4.1 и 5.1 заземлена. Измерительные обмотки 3.2, 4.2 и 5.2 соединены последовательно, при этом обмотка 4.2 включена встречно с обмотками 3.2 и 5.2. Внешний вывод обмотки 3.2 и общая точка обмоток 4.2 и 5.2 подключены к первому входу блока 8 преобразования сигнала, а внешний вывод обмотки 5.2 и общая точка обмоток 3.2 и 4.2 - ко второму входу блока 7 преобразования сигнала, соединенного своими выходами с блоком 8 представления информации.
Катушки параметрического и трансформаторного вихретоковых преобразователей, применительно к предложенному техническому решению, отличаются только количеством обмоток. Катушки 3,4 и 5 параметрического вихретокового преобразователя состоят из одной обмотки, а катушки 3,4 и 5 трансформаторного вихретокового преобразователя состоят из возбуждающих обмоток 3.1, 4.1, 5.1 и измерительных обмоток 3.2, 4.2 и 5.2. При этом соответствующие витки всех обмоток имеют прямоугольную форму и одинаковое соотношение сторон. Измерительные и возбуждающий обмотки каждой из катушек трансформаторного вихретокового преобразователя рекомендуется выполнять идентичными и размещать их витки рядом с друг другом в одной плоскости или в общем пазе каркаса соответствующей катушки.
Многослойный углепластиковый контролируемый объект, как правило, состоит из нескольких групп слоев. В каждой группе закон изменения направления углеродных нитей от слоя к слою повторяется. Угол между направлениями углеродных нитей в соседних слоях, обычно, составляет величину 90°, 60° или 45°.
Реализацию предложенного способа вихретокового контроля многослойных углепластиковых объектов рассмотрим на примере контроля с помощью трансформаторного вихретокового преобразователя 2 многослойного углепластикового объекта 9 с группами, образованными соответствующими слоями типа 9.1 и типа 9.2 с ортогональным расположением углеродных нитей между ними. Последовательность операций и соответствующие зависимости для варианта выполнения вихретокового преобразователя 2 параметрическим - аналогичны. Это же относится к вариантам выполнения катушек 3-5 индуктивности с витками, расположенными в плоскостях ортогональных рабочему торцу преобразователя 2 (фиг. 4) и в плоскостях параллельных ему (фиг. 5). Предложенный способ реализуется следующим образом. С помощью прямоугольной катушки индуктивности 4, запитанной от источника 1, возбуждают на бездефектном участке контролируемого объекта 9 вихревые токи и измеряют вносимый ими вихретоковый сигнал U1. Вихретоковый сигнал U1 определяется как разность напряжения холостого хода U0 на компенсационной катушке 3 и напряжения U4=U0+U1 на катушке 4. Сигнал U1 формируется между внешними зажимами катушек 3 и 4 и поступает на первый вход блока 7 преобразования сигнала. Затем катушку 4 поворачивают относительно оси 10 (фиг. 4-5), перпендикулярной к поверхности контролируемого объекта 9, и добиваются максимума вихретокового сигнала U1. Целесообразно выбирать ось 10, совпадающую с осью симметрии катушки 4. Максимум U1 для варианта вихретокового преобразователя 2, представленного на фиг. 3, возникает при условии, что плоскость витков катушки 4, параллельна углеродным волокнам верхнего слоя 9.1. Типичная зависимость U1 от угла γ между плоскостью витков катушки 4 и направлением ориентации волокон верхнего слоя 9.1 контролируемого объекта 9 представлена на фиг. 5. Здесь представлены зависимости при взаимодействии с объектами, состоящими из одного слоя 9.1 и из двух слоев 9.1 и 9.2 с ортогональными направлениями. Видно, что при наличии двух слоев имеют место два максимума вихретокового сигнала U1, смещенных по углу γ на 90°, при этом локальный максимум, создаваемый под влиянием второго слоя, при γ=90° имеет меньшую величину. Соответствующие зависимости для варианта вихретокового преобразователя 2, приведенного на фиг. 4, аналогичны зависимостям, показанным на фиг. 5.
После этого с помощью катушки 5 индуктивности, идентичной катушке 4, возбуждают в зоне контроля дополнительные вихревые токи и получают вихретоковый сигнал U2 под их воздействием. Вихретоковый сигнал U2 определяется как разность напряжения холостого хода U0 на компенсационной катушке 3 и напряжения U5=U0+U5 на катушке 5.
Затем поворачивают катушку 5 относительно оси 11, перпендикулярной поверхности контролируемого объекта 9. Для вихретокового преобразователя 2, представленного на фиг. 3, целесообразно выбирать ось 11, проходящей через сторону прямоугольной катушки 5, ортогональную к поверхности контролируемого объекта 9 и ближней к катушке 4. Для вихретокового преобразователя 2, представленного на фиг. 4, целесообразно выбирать ось 11, проходящей через середину короткой стороны прямоугольной катушки 5 ближней к катушке 4. В процессе вращения регистрируют локальный максимум вихретокового сигнала U2 при угловой ориентации катушки 5, не совпадающей с угловой ориентацией катушки 4, и фиксируют взаимное положение этих катушек при полученной для них угловой ориентации. Полученный угол α между ориентациями катушек соответствует углу между ориентацией углеродных волокон в различных слоях многослойного углепластикового контролируемого объекта 9. В связи с этим, при заранее известной взаимной угловой ориентации волокон в слоях контролируемого объекта угол α между ориентацией катушек 4 и 5 может быть установлен на основе этой информации.
Одинаковые значения локального максимума U2 получаются при значениях αопт<90° и α'опт=αопт+180°. Рекомендуется фиксировать положение катушки 4 относительно катушки 5 при большем из углов, т.е. при α=α'опт. Это позволяет получить большую зону максимальной чувствительность к дефектам типа расслоений при сканировании. Большая зона максимальной чувствительности достигается за счет того, что в этом случае, при пересечении в процессе сканирования границы дефекта типа расслоения, максимальный сигнал ΔU имеет место в зоне, соответствующей длинной стороне b прямоугольной катушки. При αопт<90° зона максимальной чувствительности составляет величину b×cos(αопт).
После фиксации углового положения катушек 4 и 5 регулируют отношение протекающих через них токов, добиваясь минимального значения величины ΔU на втором входе блока 7 преобразования сигнала. В схеме, представленной на фиг. 1 это достигается с помощью потенциометра 6, образующего с катушками а в схеме, представленной на схеме 2 - путем изменения величины тока на выходе регулируемого генератора 1.1.
После выполнения вышеописанных операций сканируют поверхность контролируемого объекта 9, сохраняя взаимное положение катушек 4, 5 и их угловую ориентацию относительно контролируемого объекта 9. Рекомендуется обеспечить жесткую механическую связь между катушками 4 и 5, а сканирование проводить в направлении, совпадающем с направлением волокон нижнего слоя группы в контролируемом объекте 9. В процессе сканирования по величине сигнала U1 можно следить за сохранением ориентации катушек вихретокового преобразователя 2 в выбранном направлении. Величина U1 будет уменьшаться при отклонении от выбранной ориентации в соответствии с зависимостью, представленной на фиг. 5.
Процесс изменения вихретокового сигнала ΔU при перемещении над участком с расслоением покажем на примере сканирования восьмислойного объекта с 4 группами и двумя слоями в каждой из них. Слои имеют одинаковую толщину Т, а углепластиковые волокна в соседних слоях ориентированы ортогонально друг к другу. Рассмотрим случай, когда расслоение занимает площадь, превышающую зону электромагнитного взаимодействия вихретокового преобразователя 2 с контролируемым объектом 9. Следует отметить, что в этом случае на выходе известных дифференциальных вихретоковых преобразователей вихретоковый сигнал будет отсутствовать, т.к. они осуществляют сравнение реакции одновременно от всех слоев на двух соседних участках. На фиг. 6 показано изменение вихретокового сигнала ΔU при наличии расслоения между различными слоями, при этом толщина расслоения равна толщине T слоев. Зависимости приведены для катушек 4 и 5, размещенных параллельно поверхности контролируемого объекта 9 (фиг. 4) при угле α=90° и длинной стороне катушки 4, ориентированной вдоль углеродных нитей верхнего слоя группы. Здесь на оси абсцисс показано текущее положение расслоения между соответствующими слоями. На практике расслоения возникают между слоями, а сами слои при этом не разрушаются. В связи с этим здесь и далее прямую информацию несут только значения функции (в данном случае ΔU) при целых значениях N, а линии, соединяющие соответствующие точки на графиках приведены для удобства восприятия.
Графики на фиг. 6 даны для разных значений зазора h между рабочим торцом вихретокового преобразователя 2 и поверхностью объекта 9. Для обобщения величина зазора h нормирована по толщине Т, т.е. используется величина h*=h/Т. Как видно из графиков величина ΔU при увеличении глубины залегания расслоения изменяется по периодическому закону. Локальные максимумы наблюдаются при возникновении расслоения внутри группы слоев, а минимумы - при возникновении расслоения между группами. Это объясняется тем, что в исходном состоянии суммарное воздействие слоев в группе на вихретоковый преобразователь 2 сбалансировано и при одновременном перемещении (удалении от вихретокового преобразователя 2 на величину расслоения) всей группы разбалансировка незначительна, так как отношение расстояний от торца ВТП до каждого из слоев изменяется мало. Если расслоение возникает между слоями в группе, то расстояния от ВТП до слоев группы над расслоением сохраняется, а для слоев группы за расслоением - увеличивается. Это приводит к существенной разности сигналов U1 и U2 и регистрации соответствующего значения ΔU.
Величина локальных максимумов уменьшается с увеличением глубины залегания слоев и рабочего зазора h. Это связано с двумя факторами. Первый из них - уменьшение плотности вихревых токов при увеличении, как глубины залегания, так и зазора h. Второй фактор связан с уменьшением отношения расстояний ri и ri+1 до i-го и (i+1)-го слоев, соответственно, по мере увеличения этих расстояний на величину i×T с увеличением i.
Таким образом, регистрируемый сигнал ΔU зависит не только от параметров дефекта, но и от рабочего зазора h, а также от удельной электрической проводимости σ материала, которая определяется объемной долей углеродных волокон в контролируемом объекте. Влияние σ на вихретоковый сигнал ΔU связано с изменением напряжений U1 и U2 при изменении σ, варьируемой в широких пределах.
Проведенный анализ показывает, что предложенный способ позволяет получить сигнал о наличии расслоения в том случае, если оно возникает между слоями группы. При наличии расслоения между группами будет получен сигнал ΔU на границах расслоения.
Пусть сканирование объекта 10 вихретоковым преобразователем 2 выполняется вдоль углеродных нитей верхнего слоя группы, а расслоение имеет границу, перпендикулярную направлению сканирования. Тогда при наличии расслоения под N-ым слоем рассматриваемого объекта 10 сигнал ΔU будет изменяться в соответствии с зависимостями, приведенными на фиг. 7. Здесь вихретоковый преобразователь 2 размещен так, что его катушки 4 и 5 находятся по разные стороны относительно границы расслоения. Пусть теперь сканирование выполняется вдоль углеродных нитей нижнего слоя группы (рекомендуется), а расслоение имеет границу, перпендикулярную направлению сканирования. В этом случае при наличии расслоения под N-м слоем рассматриваемого объекта 9 сигнал ΔU будет изменяться в соответствии с зависимостями, приведенными на фиг. 8. Здесь, как и для зависимостей, приведенных на фиг. 7, вихретоковый преобразователь 2 размещен так, что его катушки 4 и 5 находятся по разные стороны относительно границы расслоения.
В контролируемом объекте 9 неравномерность распределения плотности вихревых токов по толщине связана не только с изменением расстояния от соответствующей точки наблюдения, но и из-за скин-эффекта. За счет него происходит уменьшение плотности J вихревого тока по закону близкому к экспоненциальному и описываемому зависимостью

где J0 - плотность вихревого тока на поверхности, z - расстояние от поверхности до точки наблюдения, k - коэффициент затухания, зависящий от частоты возбуждающего тока и удельной электрической проводимости материала.
Изменяя коэффициент затухания путем выбора соответствующей частоты ƒ тока, можно регулировать глубину контроля, увеличивая ее с уменьшением ƒ и уменьшая с ростом ƒ. Это позволяет оценить глубину залегания расслоения путем сопоставления вихретоковых сигналов, полученных на разных частотах.
Представленные на фиг. 6-8 зависимости приведены для коэффициента затухания k=0,5. Здесь значения вихретоковых сигналов нормированы по начальному сигналу U0 катушек в воздухе (при отсутствии взаимодействия вихретокового преобразователя 2 с контролируемым объектом 9).
Как видно из приведенных на фиг. 6-8 зависимостей на величину регистрируемого сигнала ΔU существенное влияние оказывает вариация рабочего зазора h, неизбежная при сканировании и возникающая, например, за счет кривизны поверхности контролируемого объекта 9 или из-за наличия на его поверхности слоев грязи, краски и т.п.
Для подавления влияния вариации рабочего зазора h регистрируют первый вихретоковый сигнал U1=U4, вносимый в катушку 4 контролируемым объектом, подают его на второй вход блока 8 преобразования сигнала и получают отношение ΔU/U1. После выполнения данной операции зависимости ΔU/U1 от наличия и параметров расслоения для вышерассмотренных вариантов взаимодействия вихретокового преобразователя 2 с контролируемым объектом 9 примут вид, представленный на фиг. 9-11. Здесь вариация рабочего зазора в широких пределах от h*=15 до h*=25 не оказывает существенного влияния на величину ΔU/U1, используемую как информативный параметр для выявления и оценки параметров дефектов типа расслоения.
Полученный эффект объясняется следующим образом. Величина ΔU определяется разностью вихретоковых сигналов U1 и U2, вносимых объектом 9. На бездефектном участке U1=U2, так как это условие обеспечивается путем регулировки тока, создаваемого регулируемым генератором 1.1. При наличии расслоения вихретоковый преобразователь 2 разбалансируется, однако, U1 и U2 будут отличаться на величину не более 1%. Близкие значения U1 и U2 имеют место и при вариации рабочего зазора h, следовательно, они могут быть представлены в виде


где U1(h), U2(h) - зависимости вихретоковых сигналов U1 и U2 от зазора h,
hном - номинальная величина h, F(h) - функция влияния зазора h.
Соответственно, величина ΔU(h) определяется выражением

или

Тогда, учитывая (2)-(5), можно записать

Величины ΔU(hном)/U1(hном)≈ΔU(hном)/U2(hном) уже не зависят от зазора h. Таким образом, величина разностного сигнала ΔU, нормированная по вносимому в одну из катушек вихретокового преобразователя сигналу U1 или U2, несет информацию о наличии и параметрах расслоения и не зависит от вариации рабочего зазора h.
Заявляемый способ, по сравнению с известным способом, имеет повышенную вероятность выявления дефектов типа расслоений в многослойных углепластиковых объектах с изменяющимся от слоя к слою угловым направлением углеродных волокон по заранее заданному закону благодаря тому, что:
• обеспечивается возможность регистрации сигнала, вызванного расслоением с границами за зоной электромагнитного взаимодействия с вихретоковым преобразователем;
• обеспечивается существенное увеличения чувствительности к дефектам типа расслоения в многослойных углепластиковых объектах при их возникновении внутри группы слоев с периодически повторяющимся набором угловой ориентации углеродных нитей.
• обеспечивается отстройка от влияния вариации рабочего зазора на сигнал, несущий информацию о наличии и параметрах расслоения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИХРЕТОКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ КОНТРОЛЯ КАЧЕСТВА УГЛЕПЛАСТИКОВЫХ ОБЪЕКТОВ | 2021 |
|
RU2778621C1 |
| ВИХРЕТОКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ДЕФЕКТОСКОПИИ | 2022 |
|
RU2796194C1 |
| Способ балансировки вихретокового преобразователя | 2018 |
|
RU2710011C2 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ МЕДНОЙ КАТАНКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2542624C1 |
| Вихретоковый преобразователь для контроля качества углепластиковых объектов | 2019 |
|
RU2733942C1 |
| Вихретоковый преобразователь для дефектоскопии | 2023 |
|
RU2813477C1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2610931C1 |
| ВИХРЕТОКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ КОНТРОЛЯ КАЧЕСТВА УГЛЕПЛАСТИКОВЫХ ОБЪЕКТОВ | 2020 |
|
RU2743907C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПОДПОВЕРХНОСТНЫХ ДЕФЕКТОВ В ФЕРРОМАГНИТНЫХ ОБЪЕКТАХ | 2010 |
|
RU2442151C2 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ ПРОТЯЖЁННЫХ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2651618C1 |
Изобретение относится к неразрушающему контролю и может быть использовано для дефектоскопии многослойных углепластиковых объектов. Сущность изобретения заключается в том, что способ вихретокового контроля многослойных углепластиковых объектов дополнительно содержит этапы, на которых перед сканированием с помощью второй катушки индуктивности, идентичной первой, возбуждают в зоне контроля дополнительные вихревые токи, а второй вихретоковый сигнал получают под их воздействием, поворачивают вторую катушку относительно оси, нормальной к поверхности контролируемого объекта, регистрируют локальный максимум второго вихретокового сигнала U2 при угловой ориентации второй катушки, не совпадающей с угловой ориентацией первой, и фиксируют взаимное положение первой и второй катушек при полученной для них угловой ориентации. Технический результат – повышение точности выявления дефектов в многослойных углеродистых объектах. 1 з.п. ф-лы, 11 ил.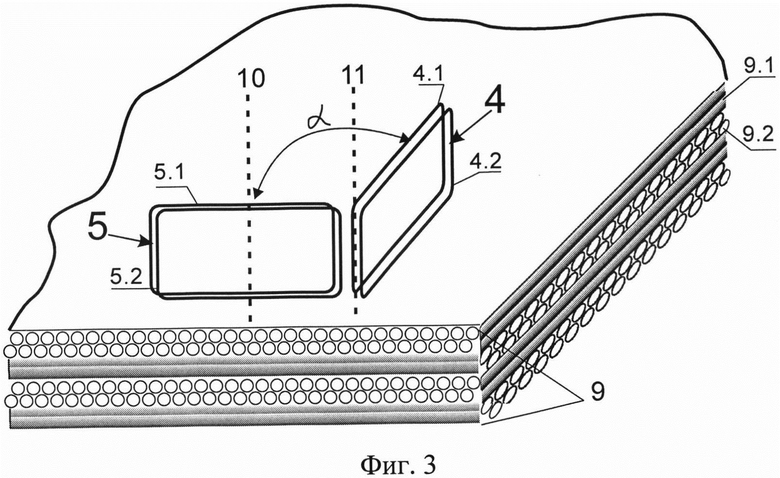
1. Способ вихретокового контроля многослойных углепластиковых объектов, заключающийся в том, что возбуждают на бездефектном участке вихревые токи с помощью прямоугольной катушки индуктивности, измеряют вносимый ими вихретоковый сигнал U1, поворачивают катушку относительно оси, нормальной к поверхности контролируемого объекта, и добиваются максимума U1, размещают на заданном расстоянии относительно первой вторую катушку индуктивности, получают с ее помощью второй вихретоковый сигнал U2, регистрируют разность ΔU второго и первого вихретоковых сигналов, сканируют поверхность контролируемого объекта, сохраняя взаимное положение катушек и их угловую ориентацию относительно контролируемого объекта, и используют изменение ΔU в процессе сканирования для получения информации о наличии и параметрах дефектов, отличающийся тем, что перед сканированием с помощью второй катушки индуктивности, идентичной первой, возбуждают в зоне контроля дополнительные вихревые токи, а второй вихретоковый сигнал получают под их воздействием, поворачивают вторую катушку относительно оси, нормальной к поверхности контролируемого объекта, регистрируют локальный максимум второго вихретокового сигнала U2 при угловой ориентации второй катушки, не совпадающей с угловой ориентацией первой, и фиксируют взаимное положение первой и второй катушек при полученной для них угловой ориентации.
2. Способ вихретокового контроля многослойных углепластиковых объектов, по п. 1, отличающийся тем, что после фиксации углового положения катушек регулируют отношение протекающих через них токов, добиваются минимального значения величины ΔU, регистрируют вихретоковый сигнал U1 или U2, получают отношение ΔU/U1 или ΔU/U2 и по полученному отношению судят о наличии и параметрах дефектов.
| Mizukami K., Mizutani Y., Todoroki A., Suzuki Y | |||
| Detection of in-plane and out-of-plane fiber waviness in unidirectional carbon fiber reinforced composites using eddy current testing | |||
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| Вихретоковый способ неразрушающего контроля | 1988 |
|
SU1631398A1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ ТОЛЩИНЫ КОМПОЗИТНЫХ МАТЕРИАЛОВ НА НЕМЕТАЛЛИЧЕСКИХ ПОДЛОЖКАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2577037C1 |
| WO 2008091772 A1, 31.07.2008. | |||

