Изобретение относится к сельскохозяйственному машиностроению, в частности, к машинам для скашивания сельскохозяйственных культур, конкретно к режущим аппаратам косилок и жаток.
Известен режущий аппарат, содержащий пальцевый брус, сдвоенные пальцы, сегменты, натяжное устройство, желоб для холостой ветви, ведущую звездочку с гидромотором, предохранительный щиток и цепь [патент Республики Казахстан №25909, опубл. 15.08.2012, бюл. №8].
Недостатком данного режущего аппарата является низкая его технологичность из-за отсутствия возможности определения момента появления неисправности режущего аппарата - поломок одного или нескольких сегментов.
Наиболее близким по совокупности существенных признаков является режущий аппарат, содержащий пальцевый брус с пальцами и противорежущими пластинами, нож в виде цепного контура с сегментами, привод ножа, направляющие короба, защитный щиток, ведущую и ведомую звездочки, механизм перемещения ведомой звездочки, пластину из маломагнитного материала, отверстие, датчик, крепежный элемент, блок контроля и сигнализирующее устройство, привод со щеткой [патент РФ №2609907, опубл. 07.02.2017, бюл. №4].
Недостатком данного режущего аппарата является отсутствие возможности автоматического увеличения линейной скорости сегментов цепного контура при отказах одного или нескольких сегментов для обеспечения необходимого качества среза растений.
Сущность изобретения заключается в следующем.
Задача изобретения - повышение производительности жатки за счет исключения ее остановок при отказах одного или нескольких сегментов для увеличения линейной скорости сегментов цепного контура с целью обеспечения необходимого качества среза растений.
Технический результат - автоматическое регулирование линейной скорости сегментов цепного контура при отказах одного или нескольких сегментов для выполнения агротехнических требований по качеству среза растений.
Указанный технический результат достигается режущим аппаратом жатки, который содержит нож в виде цепного контура с сегментами, привод ножа, датчик, блок контроля, сигнализирующее устройство, привод со щеткой, при этом дополнительно подключены к входу блока контроля последовательно датчик скорости жатки и аналого-цифровой преобразователь, а к выходу блока контроля - блок регулирования, функционально связанный с приводом цепного контура.
Существенными признаками, влияющими на достижение заявленного технического решения, являются:
- подключение к входу блока контроля последовательно датчика скорости жатки и аналого-цифрового преобразователя;
- подключение к выходу блока контроля блока регулирования;
- выполнение функциональной связи блока регулирования с приводом цепного контура.
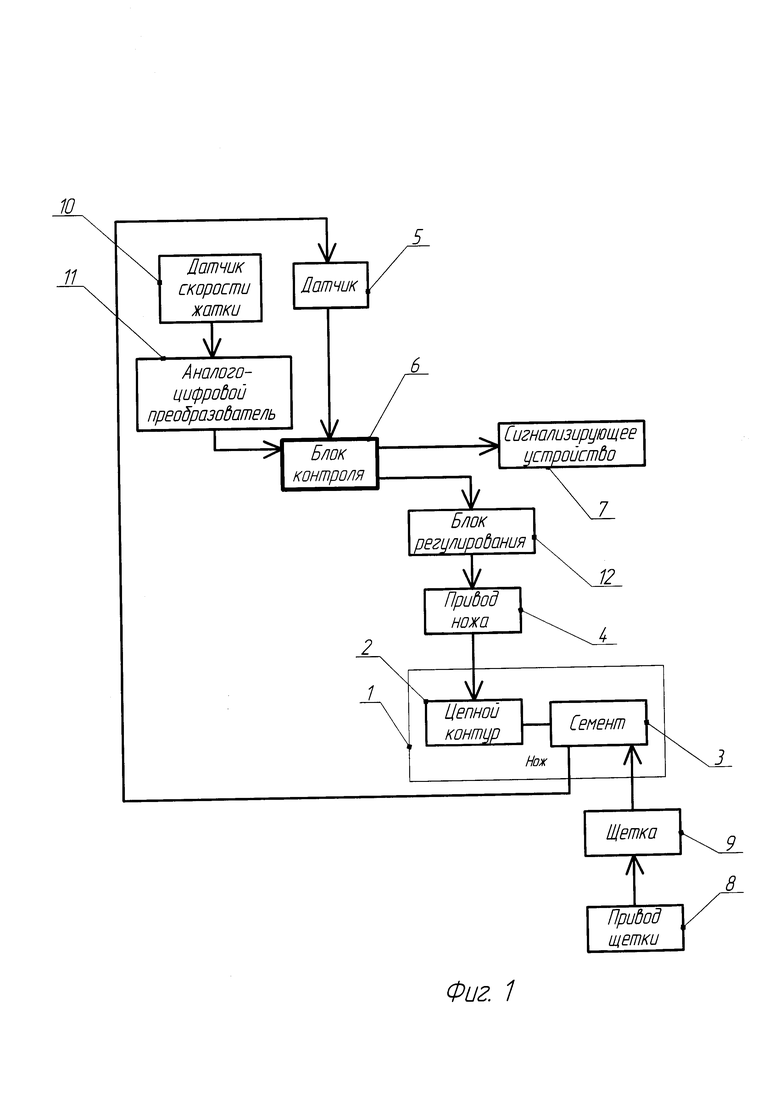
На фиг. 1 представлена блок-схема режущего аппарата жатки.
Режущий аппарат жатки содержит нож 1 в виде цепного контура 2 с сегментами 3, привод 4 ножа, датчик 5, блок контроля 6, сигнализирующее устройство 7, привод 8 со щеткой 9, датчик скорости 10 жатки, аналого-цифровой преобразователь 11, блок регулирования 12.
При конкретном выполнении конструкции режущего аппарата жатки могут быть использованы в качестве: блока контроля 6 - блок управления инжекторного двигателя, датчиков 5 и 10 - датчик положения коленчатого вала двигателя, сигнализирующего устройства 7 - лампочка или звуковое устройство, привода ножа 4 - электродвигатель или гидромотор, блока регулирования 12 - преобразователь частоты тока (при применении в качестве привода ножа 4 электродвигателя) или регулируемый гидравлический дроссель (при использовании в качестве привода ножа 4 гидромотора).
Перед началом использования режущий аппарат жатки должен быть собран, а блок управления 6 настроен на время t0, tmin и на количество сегментов Nc, при прохождении которых под датчиком 5 блок управления 6 подает сигнал блоку регулирования 12 на изменение частоты вращения вала привода 4 цепного контура 2.
Время t0, определяемое минимальной продолжительностью прохождения под датчиком 5 участка цепного контура 2, длина S которого равна шагу установки сегментов 3 на цепном контуре 2, рассчитывается по формуле t0=S/Vp0, где Vp0=Vжλ, - линейная скорость сегментов 3, здесь Vж - линейная скорость жатки, допустимая по агротехническими требованиями на скашивание сельскохозяйственной культуры (например, при скашивании веничного сорго жаткой соргоуборочного комбайна Vж=1,7-2,8 м/с), λ - коэффициент, учитывающий отношение линейной скорости сегментов 3 цепного контура 2 и поступательной скорости движения жатки (для качественного скашивания сельскохозяйственных культур λ=1,2-1,3). При расчете t0 принимают скорость жатки Vж, определяемую датчиком скорости 10 жатки и преобразовываемую аналого-цифровым преобразователем 11 в цифровой сигнал, передаваемый блоку управления 6. Величину λ принимают равным максимальному значению (λ=1,3). От времени t0 зависит качество среза растений сельскохозяйственной культуры.
Время tmin определяется расчетным путем или экспериментальными исследованиями по максимально допустимой линейной скорости сегментов 3, исходя из прочностных показателей цепного контура 2.
Время t0 и tmin настраивается с допустимым отклонением Δt=±10-15%.
Количество сегментов Nc определяется по формуле Nc=N0+1, где N0 - допустимое по качеству среза растений количество отказавших рядом расположенных сегментов 3 на цепном контуре 2. N0 определяется экспериментальным путем для конкретной марки жатки на скашивании определенной сельскохозяйственной культуры. Например, для жатки соргоуборочного комбайна при скашивании веничного сорго N0=3.
Режущий аппарат жатки работает следующим образом.
Привод 4 ножа 1 приводит в движение цепной контур 2, при этом сегменты 3 скашивают растения, подаваемые к режущему аппарату. Сегменты 3 перемещаются под датчиком 5. При отсутствии отказов сегментов 3, датчик 5 формирует сигнал с равномерными по частоте и амплитуде всплесками напряжения. В этом случае время прохождения датчиком 5 расстояния S соответствует времени t0±Δt. Блок контроля 6 не подает сигнал блоку регулирования 12 на изменение частоты вращения вала привода 4 ножа 1. Линейная скорость сегментов 3 не изменяется и равна расчетной скорости Vp0.
При отказах одного или нескольких сегментов 3, расположенных подряд на цепном контуре 2, за заданный период контроля, т.е. при прохождении Nc сегментов 3 под датчиком 5, в блок контроля 6 поступает сигнал, соответствующий tфакт. Причем, tфакт. зависит от числа отказавших сегментов 3. Блок контроля 6 сравнивает tфакт. с t0. Если tфакт.>t0, то блок контроля 6 подает сигнал блоку регулирования 12 на увеличение частоты вращения вала привода 4 цепного контура 2 и на сигнализирующее устройство 7. Новую величину линейной скорости сегментов 3 фиксирует датчик 5, который подает сигнал блоку контроля 6. Увеличение частоты вращения вала привода 4 цепного контура 2, а следовательно, и линейной скорости сегментов 3 осуществляется до момента, когда tфакт.=t0, блок контроля 6 отменяет сигнал на увеличение частоты вращения вала привода 4 цепного контура 2. Линейная скорость сегментов 3 сохраняется на достигнутом уровне.
При поступлении сигнала в блок контроля 6, соответствующего времени tфакт.<tmin блок контроля 6 подает сигнал блоку регулирования 12 на выключение привода 4 цепного контура 2.
Для исключения ложных срабатываний датчика 5 необходимо, чтобы сегменты 3 не были загрязнены растительными остатками, поэтому вращающаяся от привода 8, например, гидромотора, щетка 9, установленная перед датчиком 5 сметает частицы скашиваемой массы с сегмента 3, который первым приближается к датчику 5.
Таким образом, заявленное конструктивное выполнение режущего аппарата жатки обладает возможностью автоматического регулирования линейной скорости сегментов цепного контура при отказах одного или нескольких сегментов с обеспечением качества среза растений, определяемого агротехническими требованиями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Режущий аппарат жатки | 2019 |
|
RU2703914C1 |
| Режущий аппарат | 2015 |
|
RU2609907C1 |
| Режущий аппарат жатки с устройством транспортировки срезанных растений | 2021 |
|
RU2754449C1 |
| РЕЖУЩИЙ АППАРАТ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2013 |
|
RU2535738C1 |
| Жатка для уборки подсолнечника | 1980 |
|
SU1005706A1 |
| ВАЛКОВАЯ ЖАТКА | 2002 |
|
RU2242858C2 |
| Механизм привода мотовила жатки | 1983 |
|
SU1132837A1 |
| УСТРОЙСТВО ДВОЙНОГО СРЕЗА СТЕБЛЕЙ ЗЕРНОВЫХ КУЛЬТУР | 2013 |
|
RU2547437C1 |
| ЖАТКА | 2014 |
|
RU2565025C1 |
| Жатка двойного среза зерновых культур | 2019 |
|
RU2703913C1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к машинам для скашивания сельскохозяйственных культур, конкретно к режущим аппаратам косилок и жаток. Режущий аппарат жатки содержит нож в виде цепного контура с сегментами, привод ножа, датчик, блок контроля, сигнализирующее устройство, привод со щеткой, при этом дополнительно подключены к входу блока контроля последовательно датчик скорости жатки и аналого-цифровой преобразователь, а к выходу блока контроля - блок регулирования, функционально связанный с приводом цепного контура. Обеспечивается автоматическое регулирование линейной скорости сегментов цепного контура при отказах одного или нескольких сегментов для выполнения агротехнических требований по качеству среза растений. 1 ил.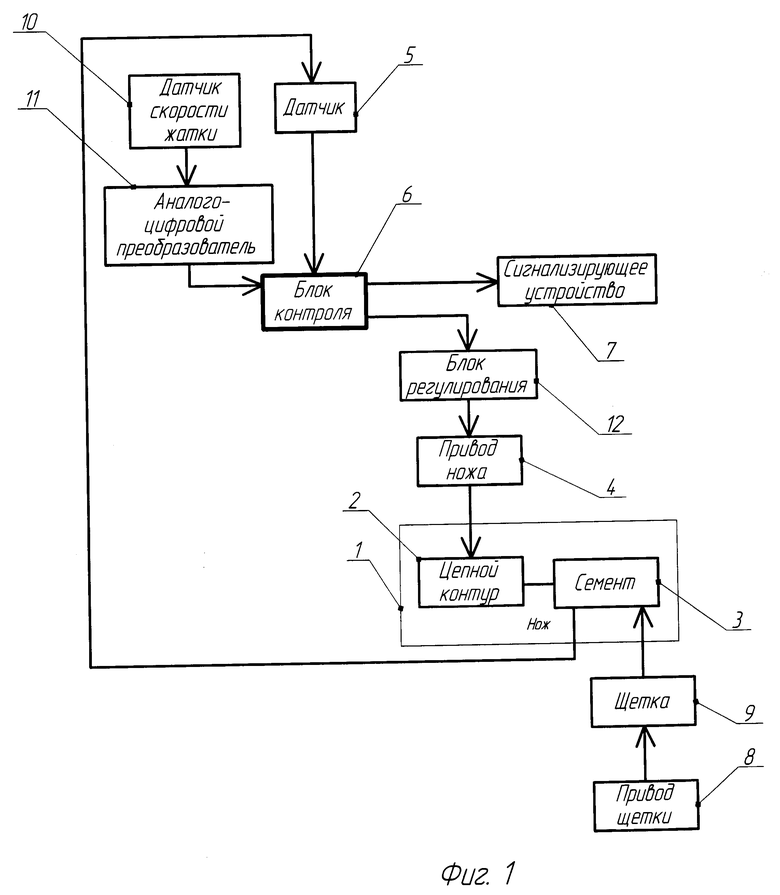
Режущий аппарат жатки, содержащий нож в виде цепного контура с сегментами, привод ножа, датчик, блок контроля, сигнализирующее устройство, привод со щеткой, отличающийся тем, что дополнительно подключены к входу блока контроля последовательно датчик скорости жатки и аналого-цифровой преобразователь, а к выходу блока контроля - блок регулирования, функционально связанный с приводом цепного контура.
| Режущий аппарат | 2015 |
|
RU2609907C1 |
| Приспособление для снятия дрезины с рельсов | 1932 |
|
SU31466A1 |
| Режущий аппарат жатки | 2019 |
|
RU2703914C1 |
| Станок для изготовления камышитовых и тому подобных плит | 1931 |
|
SU25909A1 |

