Область техники, к которой относится изобретение
Изобретение относится к медицинской технике, конкретнее - к реабилитационным тренажерам, предназначенным для восстановления двигательной активности ног пациентов с нарушением опорно-двигательного аппарата, а именно, при травме спинного мозга, после инсульта, детского церебрального паралича, а также при заболеваниях, которые приводят к нарушению цикла шагательных движений
Предпосылки создания изобретения
Методика локомоторной терапии признана одной из самой эффективных реабилитационных технологий восстановления навыка ходьбы во всем мире. Она заключается в ходьбе на тредмилле с одновременной компенсацией части веса пациента и принудительном передвижением его ног по движущейся ленте тредмилла. Данная методика может быть реализована с помощью известных роботизированных комплексов, применяемых при восстановлении ходьбы пациентов после травмы спинного мозга, инсульта, детского церебрального паралича и т.п.
Патент РФ №2240851 С1 раскрывает тренировочное устройство для восстановления двигательной активности. Оно представляет собой две вертикальные штанги, установленные на горизонтальных опорах, между которых установлена беговая дорожка. На вертикальных штангах крепится кривошипно-шатунная передача, представляющая собой раму с блоками и противовесом. Устройство позволяет осуществлять принудительные шаговые движения по движущейся ленте беговой дорожки. Для обеспечения пассивного передвижения ног каждое колено пациента крепится с помощью эластичных ремней к подвижным коленоупорам, синхронность движения которых обеспечивается кривошипно-шатунной передачей. Колени пациента осуществляют возвратно-поступательные движения.
Патент РФ №2402311 С1 описывает устройство принудительного передвижения ног, которое содержит коленоупоры и упоры голени с эластичными ремнями для крепления коленей и голени пациента, а также определенный набор рычагов на базе кривошипно-шатунной передачи (КШП). Один конец длинного рычага КШП (он же шатун) соединен с верхней частью рычага голени и коротким рычагом КШП (он же кривошип), а другой его конец соединен с нижней частью тяги бедра. Верхняя часть тяги бедра закреплена неподвижно, а нижняя ее часть дополнительно соединена с верхней частью тяги голени и через дистансер коленоупора - с коленоупором ноги. На нижней части тяги голени укреплены рычаг голени и через дистансер голени упор голени ноги. Работа КШП заключается в следующем. Короткий рычаг КШП вращается по часовой стрелке. При движении короткого рычага КШП по дуге 90-270 град. за счет рычага голени тяга голени сгибается по отношению тяги бедра, что приводит к принудительному сгибанию ноги в коленном суставе во время цикла переноса шагового движения. При движении по дуге 270-90 град. нога проходит цикл опоры шагового движения.
Однако применяемые в данных устройствах коленоупоры и упоры голени ноги с неподвижными крепежными площадками не позволяют своевременно опустить или поднять ногу в начальный и конечный моменты опоры.
Неподвижное крепление в продольной и поперечной области коленоупоров и свободное крепление стопы не позволяют менять положение колена пациента во время шаговых движений и прижимать стопу во время цикла упора шага. Проблема с изменением положения колена во время ходьбы в продольной и поперечной области возникает у детей с последствиями ДЦП. Зачастую колени у таких детей излишне сведены и до конца не выпрямляются во время ходьбы. Кроме этого, современные исследования показали, что в стопе содержатся нейронные окончания, которые в значительной степени влияют на шагательные движения человека. Для их активации стопа должна прижиматься к полотну беговой дорожки во время цикла опоры.
Все вышеперечисленные недостатки ухудшают клиническую биомеханику ходьбы.
Кроме этого, используемые в известных устройствах рычаги КШП с фиксированной длиной не позволяют подстраивать механизм принудительного передвижения ног под рост пациента.
Предлагаемое устройство позволяет устранить данные недостатки.
Суть изобретения
Задачей изобретения является устранение указанных недостатков и повышение реабилитационного эффекта при восстановлении пациентов с нарушением опорно- двигательного аппарата.
Техническим результатом является улучшение клинической биомеханики ходьбы. В частности, улучшение клинической биомеханики ходьбы достигается за счет:
1) увеличения начальной фазы периода амортизации, уменьшения времени постановки стопы с пятки, увеличения фаза отталкивания;
2) возможности изменения положения колена в продольном и поперечном положении в цикле шага,
3) возможности прижатия стопы во время цикла опоры шага.
Дополнительный технический результат настоящего изобретения состоит в создании универсального устройства для принудительного перемещения ног, которое может использоваться как взрослыми пациентами, так и детьми.
Технический результат достигается благодаря тому, что предложенное согласно настоящему изобретению реабилитационное устройство принудительного передвижения ног содержит подвижные коленоупоры и подвижные упоры голени, каждый из которых имеет крепежную площадку с выступами, между которыми вставлена ось с подшипником скольжения, выполненным с возможностью свободного перемещения вдоль оси, причем между верхним выступом и подшипником скольжения вставлена пружина сжатия; тягу бедра, верхняя часть которой закреплена неподвижно, а нижняя часть имеет неподвижное соединение через дистансер коленоупора с подшипником скольжения коленоупора; тягу голени, верхняя часть которой соединена с нижней частью тяги бедра, а нижняя часть имеет неподвижное соединение через дистансер упора голени с подшипником скольжения упора голени, а также соединена с рычагом прижатия стопы; кривошипно-шатунную передачу, включающую соединенные между собой длинный рычаг и короткий рычаг; и рычаг голени, первый конец которого соединен с первым концом длинного рычага кривошипно-шатунной передачи, а второй конец соединен с нижней частью тяги голени, при этом второй конец длинного рычага кривошипно-шатунной передачи соединен с нижней частью тяги бедра; причем дистансер коленоупора и рычаг прижатия стопы выполнены в виде телескопических соединений с механизмом изменения длины; дистансер коленоупора имеет Г-образную форму и выполнен с возможностью изменения длины в продольном и поперечном направлении.
В некоторых вариантах осуществления изобретения тяга бедра, тяга голени, длинный рычаг кривошипно-шатунной передачи, короткий рычаг кривошипно-шатунной передачи, рычаг голени выполнены в виде телескопических соединений с механизмом изменения длины.
В некоторых вариантах осуществления изобретения механизм изменения длины выполнен в виде электропривода, установленного на ось, проходящую внутри телескопического соединения.
В некоторых вариантах осуществления изобретения электропривод выполнен на базе шагового двигателя.
Изменение длины короткого и длинного рычагов кривошипно-шатунной передачи, тяги бедра, тяги голени и рычага голени в зависимости от роста пациента достигается за счет телескопического исполнения этих рычагов с фиксатором.
Увеличение начальной фазы периода амортизации, уменьшение времени постановки стопы с пятки, увеличения фазы отталкивания достигается введением подвижных подпружиненных коленоупоров и упоров голени.
Изменение в продольном и поперечном направлении положения колена достигается возможностью изменения длины телескопической конструкции дистансера коленоупора с помощью соответствующих шаговых двигателей.
Прижатие стопы во время цикла опоры шага достигается возможностью изменения длины телескопической конструкции рычага прижатия стопы с помощью шагового двигателя.
Краткое описание чертежей
Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов осуществления служат для пояснения принципов настоящего изобретения.
На фиг. 1 показана принципиальная схема устройства.
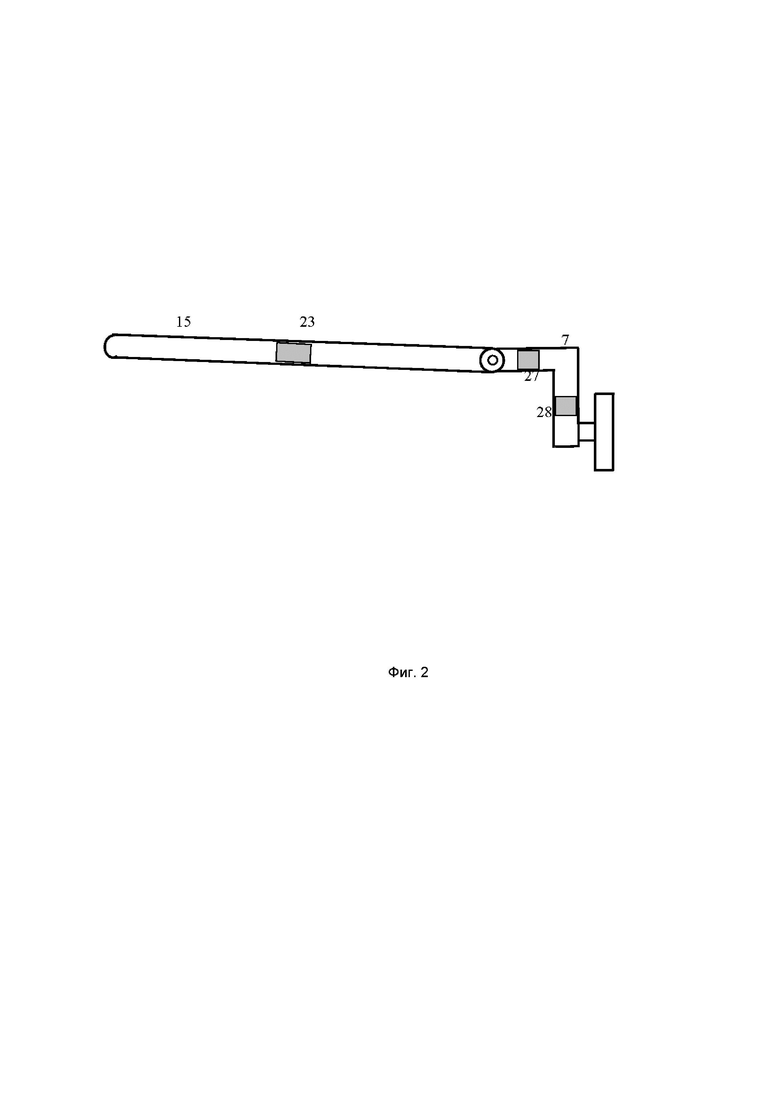
На фиг. 2 показан вид сверху дистансера коленоупора.
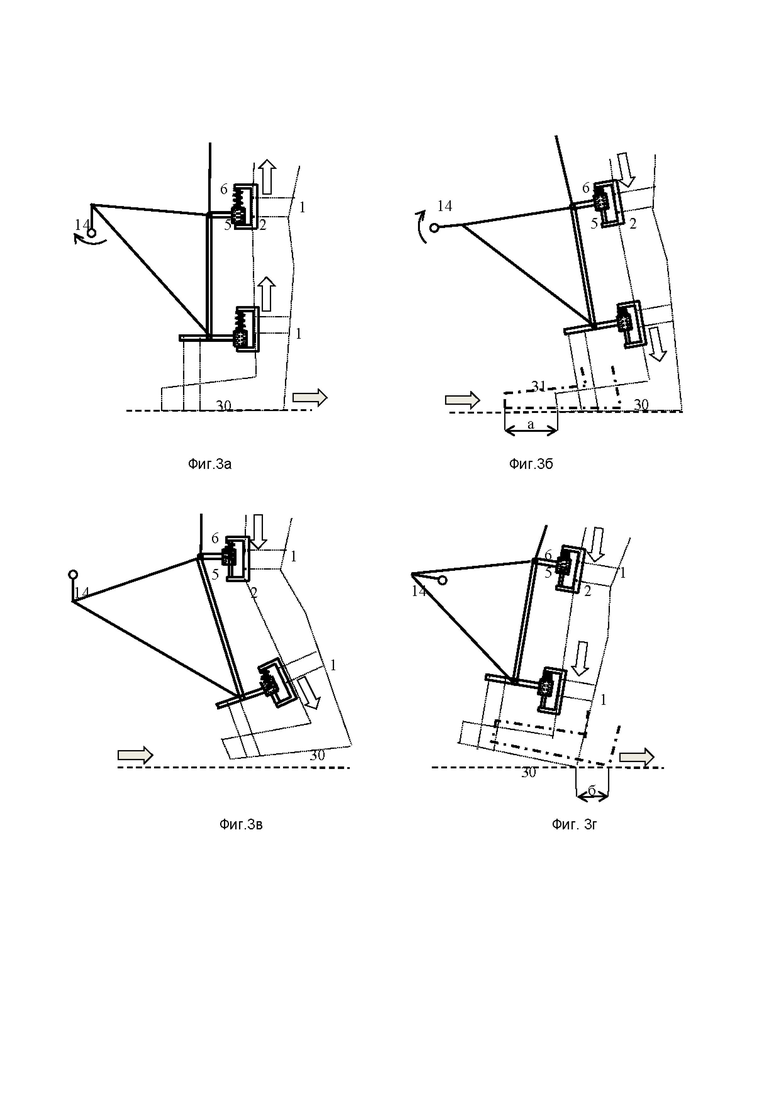
На фиг. 3а-3 г изображено поэтапное положение коленоупора и упора голени.
На фиг. 4 изображено поэтапное положение дистансера коленоупора.
Термины и определения
Для лучшего понимания настоящего изобретения ниже приведены некоторые термины, использованные в настоящем описании изобретения. Если не определено отдельно, технические и научные термины в данной заявке имеют стандартные значения, общепринятые в научной и технической литературе.
В настоящем описании и в формуле изобретения термины «включает», «включающий» и «включает в себя», «имеющий», «снабженный», «содержащий» и другие их грамматические формы не предназначены для истолкования в исключительном смысле, а, напротив, используются в неисключительном смысле (т.е., в смысле «имеющий в своем составе»). В качестве исчерпывающего перечня следует рассматривать только выражения типа «состоящий из».
Под термином «универсальный» в части его использования относительно устройства принудительного перемещения ног пациента в данном документе понимают возможность адаптации механики устройства под рост пациентов и возможность изменять походку пациента при необходимости.
Под термином «пассивное движение ног» подразумевается принудительное передвижение ног пациента, у которого или полностью отсутствуют движения в ногах, или они чрезвычайно искажены из-за болезни или травмы.
Термин «соединенный» означает функционально соединенный, при этом может быть использовано любое количество или комбинация промежуточных элементов между соединяемыми компонентами (включая отсутствие промежуточных элементов).
Кроме того, термины «первый», «второй», «третий» и т.д. используются просто как условные маркеры, не накладывая каких-либо численных или иных ограничений на перечисляемые объекты.
Подробное описание изобретения
Обычно, в реабилитационном процессе восстановления двигательной активности пациентов с нарушением опорно-двигательного аппарата используют тренажер для локомоторной терапии, который состоит из нескольких составляющих: беговая дорожка, работающая на малых скоростях, вмонтированная в станину; станина с регулируемым верхним держателем и с брусьями, регулируемыми по высоте и ширине; устройство для компенсации части веса пациента, представляющее собой лебедку для облегчения вертикализации корпуса пациента и лямочные предохранительные пояса, которые надеваются на пациента; а также устройство принудительного передвижения ног.
Настоящее решение относится в целом к устройству принудительного передвижения ног, которое обеспечивает физиологическое движение нижних конечностей посредством приводов тазобедренного и голеностопного суставов, и кинематическая схема которого позволит улучшить биомеханику ходьбы по сравнению с существующими аналогами.
Описание примерного варианта осуществления настоящего изобретения, приведенное ниже, приводится исключительно в качестве примера и предназначено для иллюстративных целей и не предназначено для ограничения объема раскрываемого изобретения.
Колени и голеностопные суставы пациента фиксируются с помощью соответствующих коленоупоров и упоров голени.
В частности, каждая нога пациента (см. фиг. 1) крепится с помощью эластичных ремней 1 к подвижному коленоупору и подвижному упору голени.
Коленоупор выполнен в виде крепежной площадки коленоупора 2, с тыльной стороны которой расположены выступы. Выступы ориентированы в сторону кинематической схемы устройства принудительного передвижения ног. В целом, крепежная площадка коленоупора 2 имеет П-образный профиль при виде сбоку. Основание крепежной площадки коленоупора 2 может представляет собой деталь прямоугольной формы.
Между выступами крепежной площадки коленоупора 2 вставлена ось коленоупора 4, на которой свободно перемещается подшипник скольжения коленоупора 5. Причем между верхним выступом и подшипником скольжения 5 вставлена пружина сжатия коленоупора 6.
Упор голени выполнен в виде крепежной площадки упора голени 3, которая имеет аналогичную конструкцию. Крепежная площадка упора голени 3 имеет расположенные с ее тыльной стороны выступы. Выступы ориентированы в сторону кинематической схемы устройства принудительного передвижения ног.В целом, крепежная площадка упора голени 3 имеет П-образный профиль при виде сбоку. Основание крепежной площадки упора голени 3 может представляет собой деталь прямоугольной формы.
Между выступами крепежной площадки упора голени 3 вставлена ось упора голени 9, на которой свободно перемещается подшипник скольжения упора голени 11. Причем между верхним выступом и подшипником скольжения 11 вставлена пружина сжатия упора голени 10.
Колебательное движение колен пациента обеспечивается за счет тяги бедра 8, верхняя часть которой закреплена неподвижно с возможностью вращения, и кривошипно-шатунной передачи (далее - КШП), состоящей из соединенных длинного рычага 15 и короткого рычага 14.
Нижняя часть тяги бедра 8 соединена с одним из концов длинного рычага 15 КШП, а также - через дистансер 7, с подшипником скольжения 5 крепежной площадки коленоупора 2, к которой крепится колено пациента. Соединение подшипника скольжения коленоупора 5 через дистансер коленоупора 7 с нижней частью тяги бедра 8 неподвижное.
Принудительное движение голеностопа пациента обеспечивается за счет тяги голени 13 и рычага голени 16. Верхняя часть тяги голени 13 соединена с нижней частью тяги бедра 8, а нижняя часть тяги голени 13 соединена с крепежной площадкой упора голени 3 и с рычагом прижатия стопы. Рычаг голени 16 первым концом соединен с концом длинного рычага 15 КШП, а вторым - с нижней частью тяги голени 13.
При этом верхняя часть рычага прижатия стопы соединена с нижней частью рычага голени 16, а нижняя часть рычага прижатия стопы упирается в стопу пациента.
Соединение крепежной площадки упора голени 3 с нижней частью тяги голени 13 осуществляется неподвижным соединением нижней части голени 13 через дистансер голени 12 с подшипником скольжения 11 крепежной площадки упора голени 3.
Длинный 15 и короткий 14 рычаги КШП, тяга бедра 8, тяга голени 13, рычаг голени 16, дистансер коленоупора 7 и рычаг прижатия стопы выполнены в виде телескопических соединений, каждое из которых содержит наружную и внутреннюю трубы. Каждое телескопическое соединение рычага или тяги снабжено механизмом изменения длины, который выполнен в виде электропривода, установленного на ось, проходящую внутри соответствующих тяг и рычагов. В качестве электропривода предпочтительно используется электропривод на базе шагового двигателя. Однако, для специалиста в данной области техники является очевидным использование любого типа электропривода. Двигатель может быть закреплен внутри наружной трубы телескопического соединения и соединен со штоком, на конце которого установлена гайка. Гайка в свою очередь закреплена внутри внутренней трубы телескопического соединения. Для специалиста в данной области техники является очевидным любое другое крепление двигателя.
Так, механизм изменения длины рычага голени 16 в предпочтительном варианте осуществления изобретения имеет следующую конструкцию. Рычаг голени 16 выполнен в виде наружной трубы 17 и внутренней трубы 18, вставленной в наружную. В наружной трубе 17 закреплен шаговый двигатель 19, внутри которого проходит шток 20. На конце штока закреплена гайка 21, соединенная с внутренней трубой 18.
Аналогично выполнены механизмы изменения длины короткого и длинного рычагов КШП, тяги бедра и тяга голени, рычага прижатия стопы с двигателями 22, 23, 24, 25 и 29 соответственно.
Длина рычага прижатия стопы увеличивается во время упора ноги и уменьшается во время переноса.
Дистансер коленоупора 7 имеет два механизма изменения длины с использованием шаговых двигателей 27 и 28. Внешний вид сверху дистансера коленоупора 7 показан на фиг. 2. Дистансер выполнен Г-образной формы. Наружная труба телескопического соединения дистансера коленоупора 7 имеет Г-образную форму, а внутренние трубы выполнены с возможностью перемещаться вдоль оси наружной трубы за счет шаговых двигателей и штоков. Длина телескопической конструкции дистансера коленоупора 7 в продольном направлении меняется с помощью шагового двигателя 27, а поперечном направлении - шаговым двигателем 28.
Каждый шаговый двигатель механизмов изменения длины соединен с блоком управления 26. Средства передачи данных между двигателями и блоком управления 26 выбираются из устройств, предназначенных для реализации процесса коммуникации между различными устройствами посредством проводной и/или беспроводной связи, в частности, такими устройствами могут быть: GSM модем, Wi-Fi приемопередатчик, Bluetooth или BLE модуль, GPRS модуль, Глонасс модуль, NFS, Ethernet и т.п.
Блок управления 26 запрограммирован таким образом, чтобы рычаги принудительного передвижения ног двигались синхронно со скоростью движения беговой дорожки в соответствии с циклом шагательных движений клинической биомеханики ходьбы.
При регулировании длины короткого рычага 14 КШП можно менять длину шага пациента. Меняя длину рычага голени 16 и длинного рычага 15 КШП можно менять походку пациента.
Пример осуществления заявленного изобретения.
На пациента надевают лямочный предохранительный пояс вертикальной поддержки, фиксируют коленные и голеностопные суставы. После этого пациент принимает вертикальное положение или за счет силы рук и коленоупоров, или с помощью лебедки. Обычно управление работой тренажера для локомоторной терапии осуществляется с удаленного блока управления, который позволяет задавать скорость движения беговой дорожки, контролировать спастику пациента, следить за реакцией ног пациента на прикладываемые усилия. Работа устройства принудительного перемещения ног осуществляется с помощью передачи управляющих воздействий на приводы устройства от блока управления двигателями.
Подстройка механизма устройства принудительного перемещения ног под рост пациента происходит следующим образом.
На неподвижно закрепленный в наружной трубе 17 телескопического соединения рычага голени 16 шаговый двигатель 19 подается управляющий сигнал от блока управления шаговыми двигателями 26. При этом шток 20 начинает вращаться. Расстояние от двигателя 19 до закрепленной на конце штока 20 гайки 21 начинает изменяться. Так как гайка 21 неподвижно соединена с внутренней трубой 18 телескопического соединения рычага голени 16, то начинает меняться и общая длина рычага голени 16. Аналогично изменяется длина короткого 14 и длинного 15 рычагов КШП, тяги бедра 8 и тяги голени 13.
После установки на блоке управления тренажера параметров ходьбы (начальное положение, скорость, движение одной или двумя ногами), включают режим ходьбы.
Общий цикл движения крепежной площадки коленоупора 2 во время шага схематично иллюстрирован на фиг. 3 и заключается в следующем.
В исходном положении (фиг. 3а) короткий рычаг КШП 14 находится в вертикальном положении, т.е., угол его поворота равен 0 град. Стопа пациента 30, закрепленная эластичными ремнями 1, стоит на полотне беговой дорожки. За счет пружины сжатия 6 крепежной площадки коленоупора и направляющей оси 4 крепежная площадка коленоупора 2 находится в верхнем положении по отношению к неподвижно закрепленному подшипнику 5 коленоупора (показано широкой стрелкой).
После начала движения короткий рычаг КШП 14 вращается по часовой стрелке, полотно беговой дорожки движется слева направо (показано широкой заштрихованной стрелкой). Тяга бедра 8 и тяга голени 13 вращаются против часовой стрелки, оставаясь примерно на одной линии. Нога перемещается назад.
В момент, когда короткий рычаг 14 КШП повернется на угол примерно 90 град. (фиг. 3б) крепежная площадка коленоупора 2 за счет веса пациента смещается в нижнее положение, пружина коленоупора 6 сжимается, и стопа 30 остается на полотне беговой дорожки, а не преждевременно поднимается. Положение стопы при использовании аналогичного устройства без подпружиненных коленоупора и упора голени в момент отрыва показано штрихпунктирной линией 31. В этом случае поднятие стопы происходит уже при угле поворота короткого рычага 14 КШП около 70 град. В результате использования кинематической схемы заявленного изобретения фаза отталкивания каждой ноги увеличивается на расстояние «а» по сравнению с фазой отталкивания при использовании аналогичных устройств c жестким креплением коленоупоров и упоров голени.
В цикле переноса ноги короткий рычаг 14 КШП (фиг. 3в) поворачивается на угол 110-250 град.
После переноса ноги, когда короткий рычаг 14 КШП повернется на угол примерно 270 град. (фиг. 3г), нога занимает переднее положение, крепежная площадка коленоупора 2 продолжает занимать нижнее положение, и нога своевременно опускается, а не зависает над полотном беговой дорожки. В результате использования кинематической схемы заявленного изобретения начальная фаза периода амортизации увеличивается на расстояние «б» по сравнению с начальной фазой периода амортизации при использовании аналогичных устройств с жестким креплением коленоупоров и упоров голени.
Кроме этого, за счет того, что при угле поворота короткого рычага КШП 14 в пределах 270-300 град. пружина сжатия коленоупора 6 разжимается, крепежная площадка коленоупора 2 перемещается в верхнее положение, происходит своевременное без запаздывания постановка стопы с пятки.
В момент выпрямления ноги, когда она занимает положение аналогичное исходному положению (фиг. 3а), пружина коленоупора 6 находится уже в разжатом состоянии, основание с выступами крепежной площадки коленоупора 2 находится в верхнем положении, цикл повторяется.
Аналогично перемещается упор голени 3.
Изменение в продольном и поперечном направлении положения колена достигается возможностью изменения длины телескопической конструкции дистансера 7 коленоупора. Коленоупор из положения 32 (фиг. 4) при изменении длины дистансера 7 в продольном направлении длина за счет шагового двигателя 27 занимает положение 34. При изменении длины дистансера 7 коленоупора в поперечном направлении с помощью шагового двигателя 28, коленоупор из положения 32 занимает положение 33. Изменение положения коленоупора в продольном или в поперечном направлении меняется по решению лечащего врача от блока управления 26 в ручном режиме.
Прижатие стопы во время цикла опоры шага достигается за счет изменения длины телескопического рычага прижатия стопы, которое происходит с помощью шагового двигателя 29. В момент опоры длина рычага прижатия стопы увеличивается, а момент переноса уменьшается. Изменение длины рычага прижатия стопы синхронизировано с движением рычагов принудительного передвижения ног.
Таким образом, вышеприведенный пример осуществления заявленного устройства подтверждает возможность получения технического результата, который в целом достигается за счет вертикального перемещения крепежных площадок коленоупоров и упоров голени, конструкции крепления площадки коленоупора с тягой бедра и КШП, а также за счет телескопического выполнения рычагов и тяг.
Хотя настоящая патентная заявка относится к определенному в прилагаемой ниже в формуле изобретения, важно отметить, что настоящая заявка на патент содержит основание для формулировки других изобретений, которые могут, например, быть заявлены как объект уточненной формулы изобретения настоящей заявки или как объект формулы изобретения в выделенной и/или продолжающей заявке. Такой объект может быть охарактеризован любым признаком или комбинацией признаков, описанных в настоящем документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРИНУДИТЕЛЬНОГО ПЕРЕДВИЖЕНИЯ НОГ | 2009 |
|
RU2402311C1 |
| ТРЕНИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ НОГ | 2003 |
|
RU2240851C1 |
| ОРТЕЗНАЯ СИСТЕМА | 2020 |
|
RU2753801C1 |
| ПЕДАЛЬНОЕ УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ И/ИЛИ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ | 2004 |
|
RU2268026C2 |
| Устройство для продолжительной иммобилизации и вытяжения при переломе костей голени в предоперационном периоде | 2022 |
|
RU2807393C1 |
| Устройство для разработки нижних конечностей | 1991 |
|
SU1802707A3 |
| Устройство для реабилитации нижних конечностей | 1989 |
|
SU1725886A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ): ЛЫЖА, ЛЫЖЕРОЛЛЕРЫ, ШАРНИРНОЕ ЛЫЖНОЕ КРЕПЛЕНИЕ, ЛЫЖНЫЕ БОТИНКИ И СПОСОБЫ ХОДА НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2010 |
|
RU2414275C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ДВИГАТЕЛЬНЫХ НАВЫКОВ ХОДЬБЫ У ДЕТЕЙ С ДЕТСКИМ ЦЕРЕБРАЛЬНЫМ ПАРАЛИЧОМ (ДЦП) И С ЗАБОЛЕВАНИЯМИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2698987C1 |
| ПРОТЕЗ НИЖНЕЙ КОНЕЧНОСТИ И ЧАСТИ ТУЛОВИЩА | 2001 |
|
RU2219875C2 |


Изобретение относится к медицине, а именно к устройствам принудительного передвижения ног. Устройство содержит подвижные коленоупоры, подвижные упоры голени, тягу бедра (8), тягу голени (13), кривошипно-шатунную передачу и рычаг голени (16). Подвижные коленоупоры и подвижные упоры голени каждый имеет крепежную площадку (2,3) с выступами, между которыми вставлена ось (4,9) с подшипником скольжения (5,11), выполненным с возможностью свободного перемещения вдоль оси. Между верхним выступом и подшипником скольжения вставлена пружина сжатия (6,10). Верхняя часть тяги бедра закреплена неподвижно, а нижняя часть имеет неподвижное соединение через дистансер (7) коленоупора с подшипником скольжения коленоупора. Верхняя часть тяги голени соединена с нижней частью тяги бедра, а ее нижняя часть имеет неподвижное соединение через дистансер (12) упора голени с подшипником скольжения упора голени, а также соединена с рычагом прижатия стопы. Кривошипно-шатунная передача включает соединенные между собой длинный рычаг (15) и короткий рычаг (14). Первый конец рычага голени соединен с первым концом длинного рычага кривошипно-шатунной передачи, а второй конец соединен с нижней частью тяги голени. Второй конец длинного рычага кривошипно-шатунной передачи соединен с нижней частью тяги бедра. Дистансер коленоупора и рычаг прижатия стопы выполнены в виде телескопических соединений с механизмом изменения длины. Дистансер коленоупора имеет Г-образную форму и выполнен с возможностью изменения длины в продольном и поперечном направлении. Достигается улучшение клинической биомеханики ходьбы. 4 з.п. ф-лы, 7 ил.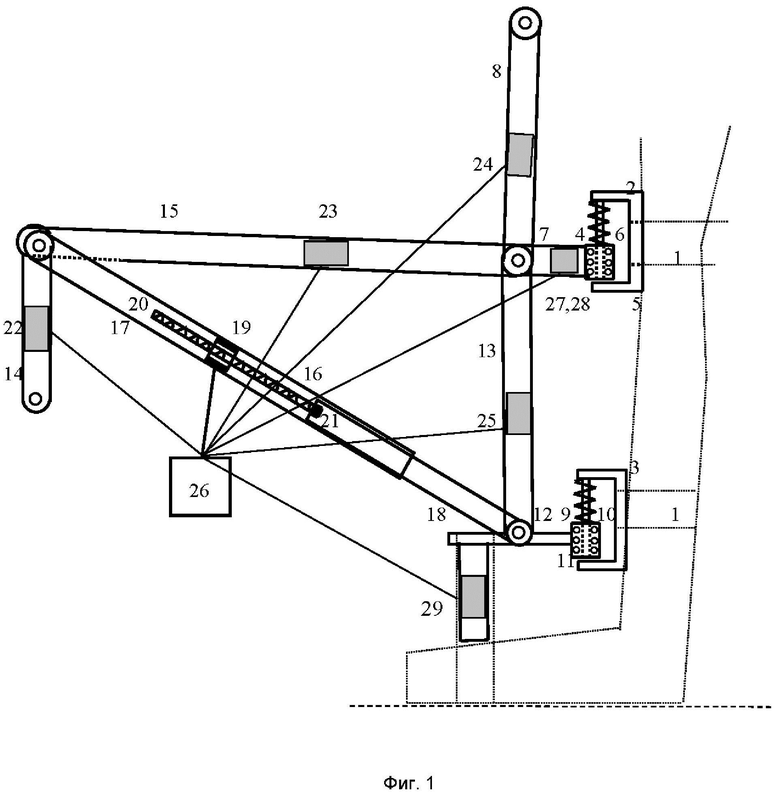
1. Устройство принудительного передвижения ног, содержащее
подвижные коленоупоры и подвижные упоры голени, каждый из которых имеет крепежную площадку с выступами, между которыми вставлена ось с подшипником скольжения, выполненным с возможностью свободного перемещения вдоль оси, причем между верхним выступом и подшипником скольжения вставлена пружина сжатия,
тягу бедра, верхняя часть которой закреплена неподвижно, а нижняя часть имеет неподвижное соединение через дистансер коленоупора с подшипником скольжения коленоупора,
тягу голени, верхняя часть которой соединена с нижней частью тяги бедра, а нижняя часть имеет неподвижное соединение через дистансер упора голени с подшипником скольжения упора голени, а также соединена с рычагом прижатия стопы,
кривошипно-шатунную передачу, включающую соединенные между собой длинный рычаг и короткий рычаг,
и рычаг голени, первый конец которого соединен с первым концом длинного рычага кривошипно-шатунной передачи, а второй конец соединен с нижней частью тяги голени, при этом второй конец длинного рычага кривошипно-шатунной передачи соединен с нижней частью тяги бедра;
причем дистансер коленоупора и рычаг прижатия стопы выполнены в виде телескопических соединений с механизмом изменения длины;
дистансер коленоупора имеет Г-образную форму и выполнен с возможностью изменения длины в продольном и поперечном направлении.
2. Устройство по п. 1, характеризующееся тем, что тяга бедра, тяга голени, длинный рычаг кривошипно-шатунной передачи, короткий рычаг кривошипно-шатунной передачи, рычаг голени выполнены в виде телескопических соединений с механизмом изменения длины.
3. Устройство по п. 1, характеризующееся тем, что телескопическое соединение дистансера коленоупора имеет наружную трубу Г-образной формы и две внутренних трубы, установленных с разных сторон в наружную трубу и выполненных с возможностью перемещения относительно наружной трубы.
4. Устройство по любому из пп. 1-3, характеризующееся тем, что механизм изменения длины выполнен в виде электропривода, установленного на ось, проходящую внутри телескопического соединения.
5. Устройство по п. 4, характеризующееся тем, что электропривод выполнен на базе шагового двигателя.
| УСТРОЙСТВО ПРИНУДИТЕЛЬНОГО ПЕРЕДВИЖЕНИЯ НОГ | 2009 |
|
RU2402311C1 |
| ТРЕНИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ НОГ | 2003 |
|
RU2240851C1 |
| US 10449107 B2, 22.10.2019 | |||
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ В СУСТАВАХ | 1998 |
|
RU2139701C1 |
| RU 2000766 C1, 15.10.1993 | |||
| US 9011296 B2, 21.04.2015. | |||

