Изобретение относится к области медицинской техники, в частности к устройствам для восстановления амплитуды движения в суставах конечностей.
Известно устройство (A 61 H 2/00 А.с. 1653770) для разработки подвижности суставов, содержащее основание с неподвижным ложементом, шарнирно соединенную с основанием раму и размещенный на ней реверсивный электропривод с блоком управления и трансмиссией, выполненной в виде установленной на выходе электропривода винтовой пары, с гайкой которой связаны коромысла, жестко связанные со сменными рычагами кулисного механизма, ползуны которого установлены на подвижном ложементе.
При использовании устройства уменьшается часть нагрузки на сустав, связанная с несовпадением осей сустава и рычажных звеньев устройства.
Однако конструктивные особенности трансмиссии - преобразование вращательного движения электропривода в поступательное движение гайки, а затем через ряд переходных элементов - в возвратно-вращательное движение подвижного ложемента, обуславливают низкий коэффициент полезного действия устройства и ограничивают амплитуду движений длиной ходового винта.
По этой причине габариты и масса устройства позволяют выполнить его только в стационарном варианте, при котором фиксируются не только сегменты конечности, образующие сустав, но и туловище пациента. Эффективное использование устройства, таким образом, и, прежде всего, при автоматическом воспроизведении длительных пассивных движений в суставах - наиболее характерном режиме работы - затруднено.
Задачами настоящего изобретения являются:
а) повышение эффективности восстановления функции суставов
- за счет компактности и функциональности устройства, хорошей приспособляемости к различным суставам, позволяющим сочетать длительные сеансы механотерапии с различными занятиями, отдыхом;
- за счет возможности одновременного восстановления с целостностью кости ее функции при использовании аппаратов внешней фиксации;
- за счет возможности воспроизведения пространственных, одновременно в двух плоскостях, движений в суставах;
- за счет воспроизведения пассивных движений в суставах как по естественной траектории, задаваемой самим суставом, так и с компенсацией нагрузки на суставные поверхности;
б) снижение стоимости лечения за счет универсальности устройства, возможности применения устройства в домашних условиях.
Поставленная задача решается за счет того, что в устройстве для восстановления подвижности суставов, содержащем по крайней мере один электропривод, систему управления, неподвижное и подвижное опорные приспособления для смежных сегментов, образующих сустав, электропривод выполнен в виде П-образной рамы, образованной в средней части опорным модулем с размещенным на нем неподвижным опорным приспособлением и имеет два выходных вала, расположенные соосно на концах рамы и связанные с подвижным опорным приспособлением посредством механизма передачи вращения между двумя несоосными валами.
Опорный модуль может быть сменным или телескопическим и содержать средства перемещения и фиксации неподвижного опорного приспособления. При этом он может быть выполнен в виде полого корпуса с размещенным внутри исполнительным двигателем, связанным с выходными валами электропривода посредством редукторов, корпуса которых образуют боковую основу рамы.
Механизм передачи вращения между двумя несоосными валами может быть выполнен в виде двух кулис, закрепленных на выходных валах электропривода, каждая из которых посредством шатуна связана с собственной направляющей, закрепленной на подвижном опорном приспособлении. Шатуны в этом механизме могут быть связаны с собственными направляющими упругой связью, а с кулисами - приводами линейного перемещения.
Такой механизм обеспечивает линейную зависимость между углом поворота выходных валов электропривода и углом поворота подвижного опорного приспособления, позволяет снизить нагрузку на суставные поверхности за счет ее переноса на подвижное опорное приспособление.
Механизм передачи вращения между двумя несоосными валами может быть представлен в виде закрепленных на выходных валах электропривода рычагов с регулируемой длиной, соединенных на свободных концах общей опорой, имеющей шарнирное соединение с ползуном, направляющая которого установлена на подвижном опорном приспособлении.
В качестве ползуна целесообразно использовать ролик или радиальный сферический подшипник, связанный с направляющей упругой связью.
Такая конструкция позволяет выполнить устройство с высокой удельной мощностью, простым, компактным, легко приспособляемым к различным суставам, может использоваться на всех этапах лечения, не требует постоянного высококвалифицированного обслуживания.
Для воспроизведения пространственных, одновременно в двух плоскостях, движений в суставах опорный модуль может содержать дополнительный электропривод поворота неподвижного опорного приспособления, связанный с системой управления.
Для обеспечения свободных движений в суставе при наложении аппарата, а также возможности автоматического ввода в систему управления данных о сохранившихся активных, за счет мышц, движениях электроприводы могут иметь управляемые муфты сцепления.
Для одновременного восстановления целостности кости и функции суставов в качестве опорных приспособлений могут использоваться любые аппараты внешней фиксации.
Для разработки коленного сустава опорное приспособление голени может быть снабжено фиксатором стопы с опорами качения.
Перечень фигур и изображений, поясняющих настоящее описание:
фиг. 1 представляет общий вид устройства при разработке коленного сустава;
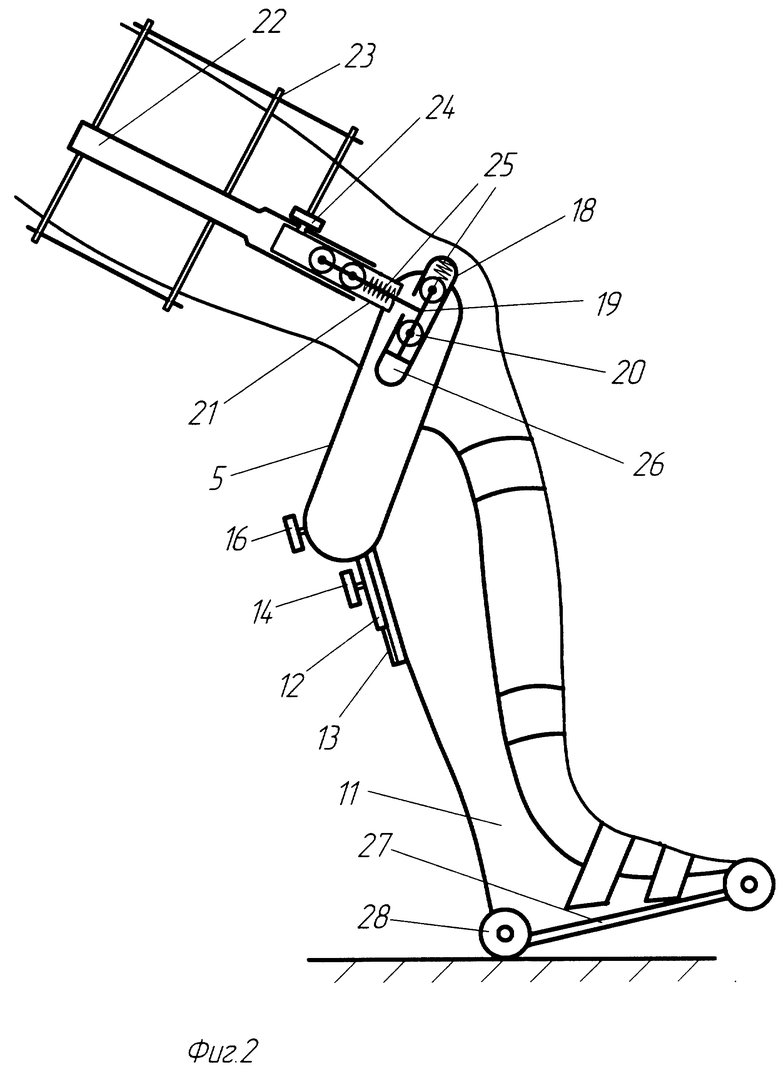
фиг. 2 - то же, вид сбоку;
фиг. 3 - схема узла перемещения и фиксации неподвижного опорного приспособления;
фиг. 4 - схема компоновки электроприводов для разработки суставов в двух плоскостях;
фиг. 5 - общий вид устройства при пространственной, одновременно в двух плоскостях разработке голеностопного сустава;
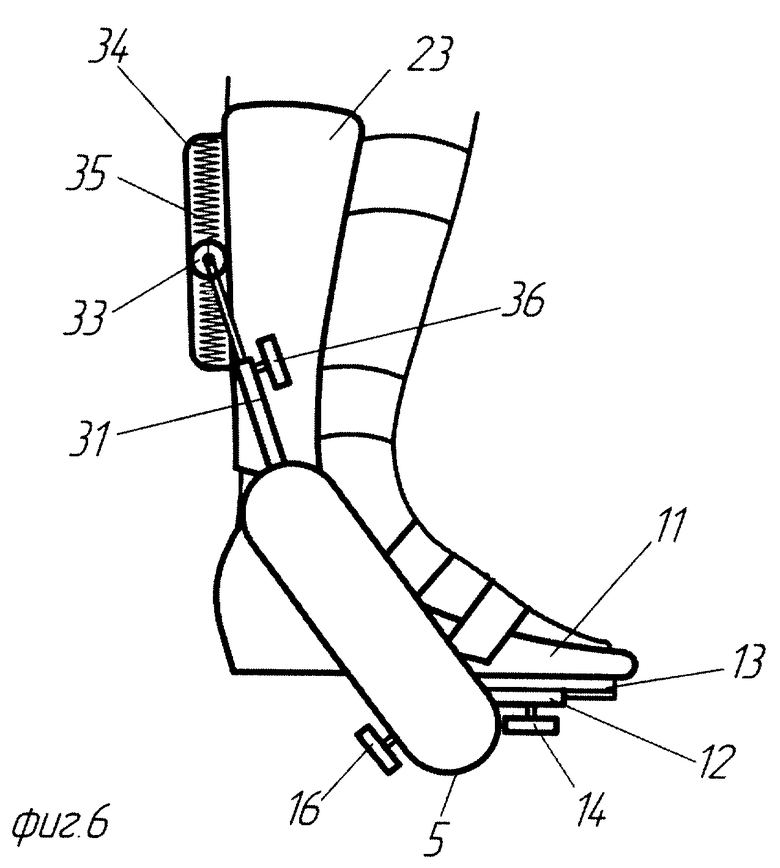
фиг. 6 - то же, вид сбоку.
Устройство для восстановления подвижности суставов (фиг. 1, 2) содержит электропривод в форме П-образной рамы, средняя часть которой - опорный модуль 1 - выполнен в виде полого корпуса с размещенным внутри исполнительным реверсивным двигателем 2 с двумя выходными валами 3. 4 - датчик оборотов двигателя на основе оптоэлектронной пары - предназначен для формирования входных сигналов системы управления с целью регулирования оборотов двигателя. Корпус опорного модуля 1 соединен с корпусами редукторов 5, образующих боковую основу рамы, а выходные валы 3 исполнительного двигателя связаны с входными валами этих редукторов. Каждый из редукторов 5 конструктивно разделен управляемой муфтой сцепления 6 на два редуктора - редуктор двигателя 7 и выходной 8.
Назначение муфт - отключение редукторов 8 от остальной части привода для свободного, без заметных усилий, вращения расположенных соосно (ось O-O) выходных валов привода 9. Такое отключение муфты помимо удобств при использовании устройства позволяет системе управления автоматически определять амплитуды сохранившихся активных (за счет мышц пациента) и пассивных (за счет приложения внешней силы) движений в суставе. Кроме того, управляемые муфты сцепления могут использоваться в качестве муфт предельного момента. 10 - потенциометрический датчик положения выходных валов привода. Опорный модуль 1 содержит средства или узел перемещения и фиксации неподвижного опорного приспособления 11, в рассматриваемом примере - ложемента голени. Этот узел (фиг. 2, 3) состоит из направляющей линейного перемещения 12 и направляемой детали 13, связанной с ложементом голени 11. Винт 14 фиксирует требуемое положение ложемента. Направляющая 12 установлена на опорном основании 1 (фиг. 3) с возможностью поворота относительно оси 15. Угол поворота регулируется винтом 16 с помощью винто-рычажного механизма 17.
Назначение узла - установка и фиксация неподвижного опорного приспособления 11 таким образом, чтобы сустав, в данном случае коленный, располагался в области оси выходных валов 9 электропривода.
Выходные валы электропривода связаны с механизмом передачи вращения между двумя несоосными валами. Назначение этого механизма - передача вращения между синхронно поворачивающимися валами электропривода и суставом пациента, который играет роль второго "вала", не совпадающего в общем случае с осью O-O.
В рассматриваемом примере кинематическая схема этого механизма может рассматриваться как модифицированный аналог крестовой муфты и позволяет компенсировать силу реакции в суставе на принудительные движения. Конструктивно механизм выполнен в виде двух синхронно работающих устройств. На каждом из выходных валов 9 закреплена кулиса 18. Шатуны 19, снабженные опорами качения 20, связывают кулисы 18 с направляющими 21, которые одновременно является частью телескопических рычагов 22, связанных с подвижным опорным приспособлением, в качестве которого используется чрескостный аппарат 23, наложенный на бедро пациента. Винт 24 фиксирует выбранную длину рычага. Пружины 25 определяют начальное положение шатуна, предотвращая возможность установки его в крайние положения и обеспечивают плавную реакцию механизма на относительное смещение центров вращения сустава и устройства.
Для компенсации чрезмерного давления на сустав кулисы связаны с шатунами приводами линейного перемещения 26, в качестве которых использованы поляризованные электромагниты.
Ложемент голени снабжен фиксатором стопы 27 с опорами качения 28 и позволяет разрабатывать колено как в положении лежа, так и в положении сидя, не требуя специального приспособления, поддерживающего голень пациента. В положении лежа одновременно с коленным в движение включается тазобедренный сустав.
Вариант схемы устройства для воспроизведения пространственных, в двух плоскостях, движений в голеностопном суставе представлен на фиг. 4-6. Опорный модуль 1 (фиг. 4) содержит дополнительный электропривод поворота неподвижного опорного приспособления 29, выходной вал которого 30 связан с направляющей линейного перемещения 12. Редукторы 5 снабжены каждый своим исполнительным двигателем 2. Выходные валы этих редукторов 9 связаны с механизмом передачи вращения между двумя несоосными валами, состоящим из телескопических рычагов 31, соединенных на свободных концах общей опорой 32, на которой закреплен сферический подшипник 33, выполняющий функцию ползуна. Необходимость использования сферического подшипника диктуется тем, что ось 30 привода неподвижного опорного приспособления 29, в рассматриваемом случае фиксатора стопы, не совпадает с осью сустава и при работе этого привода голень должна разворачиваться. Ползун связан с собственной направляющей 34 упругими элементами 35. Направляющая 34 закреплена на подвижном опорном приспособлении 23. В рассматриваемом примере - это ложемент голени. Винт 36 фиксирует длину рычагов 31.
Назначение элементов 11-16, (фиг. 5, 6) - установка неподвижного опорного приспособления, фиксатора стопы 11, таким образом, чтобы голеностопный сустав располагался в области оси O-O - не отличается от рассмотренного в предыдущем примере, с той разницей, что винт 16 регулирует угол установки электропривода 29 относительно опорного модуля 1.
Работа устройства иллюстрируется на примере разработки коленного сустава в условиях наложенного на бедро аппарата внешней фиксации 23 (фиг. 1, 2).
В этом случае в качестве неподвижного опорного приспособления 11 целесообразно выбрать ложемент голени, снабженный фиксатором стопы 27 с опорами качения 28. После закрепления ложемента на голени пациента ослабляют винт 14 и с помощью вращения винта 16 и перемещения привода по направляющим 12, 13 совмещают ось O-O привода и ось сустава. Винтом 14 фиксируют выбранное положение устройства. Затем, ослабив винты 24, выбирают нужную длину телескопических рычагов 22 и закрепляют их на аппарате 23. Длину рычагов фиксируют винтами 24. Устройство готово к работе.
В этом состоянии муфты 6 расцеплены, и пациент может совершать активные, за счет мышц, движения в суставе. При включении системы управления подается питание на датчик положения выходных валов привода 10, информация с которого об амплитудных значениях движений в суставе фиксируется системой управления и используется для автоматического программирования режима работы. Таким же образом вводятся данные по амплитуде пассивных (при приложении внешней силы) движений, скорости в зависимости от угла сгибания в суставе, что позволяет исключить случайные ошибки при использовании устройства.
По окончании процесса программирования устройство переводят в рабочий режим. Информация с датчиков оборотов двигателя 4 и положения выходных валов 10 поступает в систему управления, где формируются управляющие сигналы для двигателя 2, муфты сцепления 6 и электромагнитов 26.
Работа устройства начинается с включения муфт 6, затем включается исполнительный двигатель 2. Вращение выходных валов этого двигателя через редукторы 5 передается на выходные валы привода 9, а затем через кулисы 18, направляющие 21, рычаги 22 на аппарат 23, и приводит к изменению угла в коленном суставе.
Смещение оси сустава относительно выходных валов привода 9 в процессе работы устройства компенсируется перемещением шатунов 19 в кулисах 18 и направляющих 21.
Пока электромагниты 26 в работе не участвуют, сила, действующая на суставные поверхности (сила реакции) от развиваемого устройством момента вращения, определяется степенью тугоподвижности (сопротивлением) самого сустава. Устройство управления формирует напряжение на электромагниты 26 такой полярности, что при сгибании сустава сердечники электромагнитов (фиг. 2) выталкивают шатуны 19 (сжимают пружины 25), и, наоборот, при разгибании сустава втягивают. Таким образом, сила, создаваемая электромагнитами, направлена против силы реакции в суставе и, компенсируя ее, частично или полностью, разгружает сустав, перенося нагрузку на аппарат внешней фиксации 23, на который в этом случае действует пара сил.
Во время работы устройства голень пациента перемещается по горизонтальной поверхности с помощью опор качения 28.
Работу устройства при воспроизведении движения в суставе в двух плоскостях рассмотрим на примере разработки голеностопного сустава (фиг. 4, 5, 6). Подготовка устройства к работе и работа приводов не отличаются от предыдущего случая. Разница - в работе механизма передачи вращения между двумя несоосными валами, который в данном исполнении компенсирует несовпадение оси сустава и валов привода 9 за счет линейного перемещения сферического подшипника 33, выполняющего функцию ползуна, по направляющей 34 и поворота направляющей 34 с ложементом 23 относительно рычагов 31. Несовпадение оси сустава и выходного вала 30 компенсируется за счет линейного перемещения того же сферического подшипника 33 и поворота ложемента 23 относительно оси 32 за счет сферичности подшипника.
При раздельной работе приводов стопа совершает плоские движения либо в саггитальной плоскости, либо в плоскости, перпендикулярной выходному валу 30 привода 29. При одновременной согласованной работе приводов (по частоте колебательных движений и фазе) стопа пациента описывает конус с вершиной в голеностопном суставе и сферическим эллипсом в основании.
Предлагаемое устройство дает возможность восстанавливать движения в различных суставах, обеспечивая как обычный режим пассивных движений, так и, разгружая суставные поверхности, позволяет обеспечить движения в суставах одновременно в двух плоскостях. Оно компактно, легко перестраивается на различные суставы путем простой замены опорных приспособлений, в качестве которых могут использоваться любые аппараты внешней фиксации, что существенно расширяет функциональные возможности устройства. Устройство в минимальной степени ограничивает пациента, позволяя сочетать сеансы механотерапии с различными занятиями, отдыхом. Простейший вариант устройства, обеспечивает потребности широкого контингента больных, дешев, не требует высококвалифицированного обслуживания, может использоваться в домашних условиях.
Все это позволяет повысить эффективность лечения широкого контингента, способствует снижению общей стоимости лечения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разработки суставов нижних конечностей | 1989 |
|
SU1671297A1 |
| Устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией | 2016 |
|
RU2641065C2 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ КОЛЕННОГО СУСТАВА | 2000 |
|
RU2195912C2 |
| Механотерапевтическое устройство для разработки подвижности голеностопных суставов | 2017 |
|
RU2658760C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2004 |
|
RU2281077C1 |
| Устройство для разработки подвижности суставов нижней конечности | 1989 |
|
SU1655497A1 |
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2005 |
|
RU2307638C2 |
| Аппарат для биосинхронизированной механотерапии нижних конечностей | 2018 |
|
RU2698853C1 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ВЕРТЕБРАЛЬНЫЙ ТРЕНАЖЕР | 2001 |
|
RU2181275C1 |



Изобретение относится к медицинской технике и предназначено для восстановления амплитуды движения в суставах конечностей. Устройство содержит электропривод, корпус которого выполнен в виде П-образной рамы, и имеет два выходных вала, расположенные соосно на концах рамы. В средней части рамы с помощью регулировочных и фиксирующих элементов крепится опорное приспособление для одного из смежных сегментов, образующих сустав. Второе опорное приспособление посредством механизма передачи вращения между двумя осными валами соединяется с выходными валами редуктора. Устройство компактно крепится непосредственно на руке или ноге пациента. Снабжено системой управления. Устройство имеет дополнительные электроприводы для разработки суставов в двух плоскостях или для снижения нагрузки на суставные поверхности. Технический результат заключается в возможности восстановления движения в различных суставах, обеспечивая как обычный режим пассивных движений, так и разгружая суставные поверхности, позволяет обеспечить движение в суставах одновременно в двух плоскостях, 9 з.п.ф-лы, 6 ил.

