Устройство принудительного передвижения ног относится к элементам тренажеров восстановления двигательной активности ног пациентов с травмой спинного мозга, детским церебральным параличом и другими аналогичными заболеваниями.
Аналогичные устройства применяются при восстановлении ходьбы пациентов с ослабленным опорно-двигательным аппаратом, в частности тренажер Дикуля (http://paraplegia.narod.ru/statji/dikul.htm). Данное устройство позволяет самостоятельно принимать пациенту вертикальное положение и выполнять с помощью помощника несложные упражнения на различные группы мышц.
Наиболее близким из аналогичных устройств является тренировочное устройство для восстановления двигательной активности (см. патент №2240851 от 02.10.2003 г.). Оно представляет собой две вертикальные штанги, установленные на горизонтальных опорах, между которых установлена беговая дорожка. К штангам крепятся рама с блоками и противовесом, подвижные коленоупоры с держателями голеностоп. С помощью фала и нагрудных ремней подвешивается пациент, который руками держится за поручни, а стопами соприкасается с беговой дорожкой. Каждое колено пациента крепится с помощью эластичных ремней к подвижным коленоупорам, синхронность движения которых обеспечивается кривошипно-шатунной передачей.
Однако применяемая в данном тренажере кривошипно-шатунная передача не позволяет имитировать большие шаги пациента, подобные естественному шагу, при котором в начальный момент опора осуществляется на пятку, а в конечный момент на носок, что замедляет восстановление двигательной активности ног.
Для улучшения восстановления двигательной активности ног устройство для принудительного передвижения ног, входящее в состав тренажера, должно имитировать большие естественные шаги.
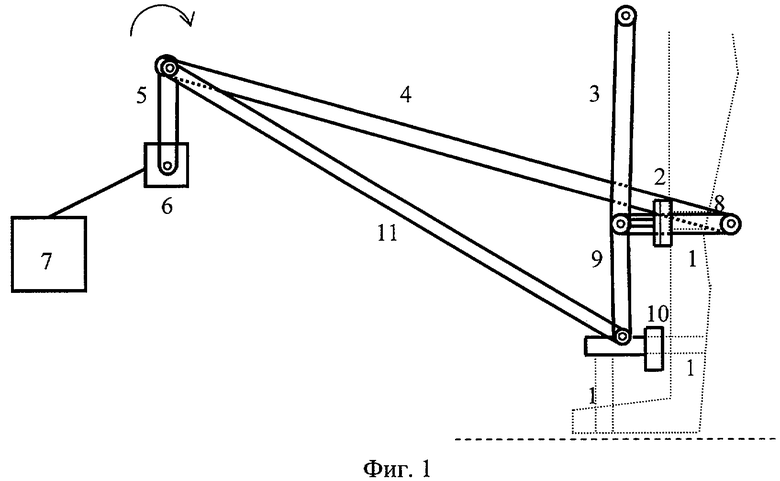
Предложенное устройство принудительного передвижения ног обладает упомянутым существенным признаком. Это достигается за счет замены возвратно-поступательного на колебательное движение коленоупоров с держателями голеностоп. Схема устройства показана на фиг.1.
Для обеспечения пассивного передвижения ног с большим шагом по беговой дорожке каждое колено пациента крепится с помощью эластичных ремней 1 к подвижным коленоупорам 2. Колебательное движение колен пациента обеспечивается за счет тяги бедра 3, верхняя часть которой закреплена неподвижно, и кривошипно-шатунной передачи, состоящей из длинного рычага 4, короткого рычага 5, соединенного с двигателем привода 6 с блоком управления 7. Причем рычаг 4 соединен с тягой 3 через дистансер 8.
Принудительное движение голеностоп пациента обеспечивается за счет тяги голени 9, один конец которой соединен с тягой бедра 3, а на другом установлен упор голени 10, к которому с помощью эластичных ремней 1 крепятся голень и стопа пациента. В свою очередь, тяга голени 9 соединена с коротким рычагом кривошипно-шатунной передачи 5 с помощью рычага голени 11.
Общий цикл движения ноги заключается в следующем. В исходный момент короткий рычаг 5 кривошипно-шатунной передачи приводится в движение двигателем 6 с угла 270 град по часовой стрелке со скоростью, равной скорости шага по беговой дорожке. Тяга бедра 3 и тяга голени 9 находятся на одной линии. Это положение сохраняется до момента, пока рычаг 5 займет угол 90 град. При движении рычага 5 по дуге от 90 до 270 град за счет наличия рычага 11 и дистансера 8 тяга голени 9 сгибается по отношению к тяге бедра 3 и нога принудительно сгибается в коленном суставе. Это позволяет свободно перенести ногу вперед. При этом скорость вращения двигателя 6 выбирается равной скорости переноса ноги. При приближении рычага 5 к углу 270 град за счет рычага голени 11 и дистансера 8 тяга голени 9 и тяга бедра 3 опять занимают положение на одной линии и нога выпрямляется. Шаг повторяется. Поэтапное положение ноги в зависимости от положения рычага 5 показано на фиг.2. Аналогичное движение осуществляет вторая нога. Управление скоростью вращения двигателя 6 и синхронизация движения ног и беговой дорожки осуществляются блоком управления 7.
Изобретение может быть реализовано путем изготовления на специализированном предприятии.

Устройство принудительного передвижения ног относится к медицинской технике и может быть использовано в реабилитационных тренажерах для пациентов с травмой спинного мозга, детским церебральным параличом и т.п. Устройство содержит подвижные коленоупоры с эластичными ремнями для крепления коленей пациента и кривошипно-шатунную передачу, которая включает длинный и короткий рычаги. Рычаги соединены между собой. Один конец длинного рычага соединен с рычагом голени и через короткий рычаг кривошипно-шатунной передачи соединен с двигателем привода и блоком управления. Другой конец этого рычага через дистансер соединен с тягой бедра. Верхняя часть тяги закреплена неподвижно подвижными коленоупорами и тягой голени, на втором конце которой укреплены рычаг голени и упор голени. Упор голени имеет эластичные ремни для крепления голени и стопы пациента. Техническим результатом изобретения является повышение эффективности использования за счет обеспечения возможности имитации больших естественных шагов пациента по движущейся беговой дорожке. 2 ил.
Устройство принудительного передвижения ног, содержащее подвижные коленоупоры с эластичными ремнями для крепления коленей пациента и кривошипно-шатунную передачу, включающую соединенные между собой длинный и короткий рычаг, отличающееся тем, что один конец длинного рычага кривошипно-шатунной передачи соединен с рычагом голени и через короткий рычаг кривошипно-шатунной передачи соединен с двигателем привода и блоком управления, а другой его конец через дистансер соединен с тягой бедра, верхняя часть которой закреплена неподвижно, подвижными коленоупорами и тягой голени, на втором конце которой укреплены рычаг голени и упор голени, имеющий эластичные ремни для крепления голени и стопы пациента.
| ТРЕНИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ НОГ | 2003 |
|
RU2240851C1 |
| БЕГУЩАЯ ДОРОЖКА | 1997 |
|
RU2131283C1 |
| US 6635023 B1, 21.10.2003 | |||
| МАССАЖНОЕ УСТРОЙСТВО | 2001 |
|
RU2212876C2 |
| JP 10118143 A, 12.05.1998 | |||
| US 5155685 A, 13.10.1992. | |||

