ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Данное изобретение относится к устройству обнаружения анормальностей для штабеля контейнеров, предназначенному для того, чтобы в процессе транспортировки штабелируемых контейнеров по пути транспортировки контролировать, правильно ли уложены соответствующие контейнеры.
УРОВЕНЬ ТЕХНИКИ
[0002] Штабелируемые контейнеры транспортируют в состоянии, в котором штабелировано требуемое их количество, и когда контейнеры хранят на площадке для складирования и хранения в пункте назначения транспортировки штабеля контейнеров, например, на площадке для хранения и складирования, где контейнеры уложены непосредственно на поверхности пола, это эффективно для значительного повышения эффективности использования поверхности пола в случае, где контейнеры уложены на полу один на другой. Кроме того, когда контейнеры извлекают, поскольку множество штабелированных контейнеров можно извлекать вместе в штабелированном состоянии, операцию извлечения можно проводить эффективно. Естественно, площадку для складирования и хранения вышеописанного штабеля контейнеров можно оснастить автоматическим устройством для хранения и извлечения штабеля контейнеров, в котором на транспортной тележке, выполненной с возможностью горизонтального перемещения на постоянной высоте над поверхностью пола в произвольном направлении на плоскости X-Y, обеспечено транспортное устройство, выполненное с возможностью подъема и опускания штабеля контейнеров посредством его поперечного захвата. Хотя в патентной литературе нет первоисточника, где это известное решение описано в явном виде, Заявитель данной заявки описал в заявках на патенты Японии №№ 2015-92812 - 2015-92814, которые являются предшествующими заявками, техническое решение, в соответствии с которым вышеописанный штабель контейнеров транспортируют на площадку для складирования и хранения и хранят на ней.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
[0003] При транспортировке контейнеров, хотя они штабелированы на вышеописанной площадке для складирования и хранения контейнеров, где обеспечено автоматическое устройство для хранения и извлечения штабеля контейнеров в месте хранения на площадке для складирования и хранения контейнеров, больше не нужно штабелировать множество контейнеров, подлежащих штабелированию, например, посредством ручной операции, и поэтому оказывается возможным эффективное осуществление операции штабелирования и хранения на площадке для складирования и хранения контейнеров. Вместе с тем, в качестве предварительного условия для этого, транспортируемый штабель контейнеров должен находиться в состоянии, в котором верхний и нижний контейнеры штабелированы без горизонтального смещения в поперечном направлении. Если верхний и нижний контейнеры смещают горизонтально в поперечном направлении за пределы допустимого диапазона, также существует вероятность, что в пункте назначения их транспортировки штабель контейнеров не удастся надежно захватить и транспортировать посредством автоматического устройства для хранения и извлечения. В частности, в случае, где контейнер включает в себя донный участок посадочного выступа, который во время штабелирования сажают в вогнутый утопленный участок верхнего конца нижнего контейнера (вогнутый утопленный участок верхнего конца также включает в себя участок проема верхнего конца контейнера - прямоугольный вогнутый утопленный участок, сформированный в накрывающей пластине, которая посажена на участок проема верхнего конца с возможностью прикрепления и открепления, или прямоугольный вогнутый утопленный участок, сформированный на участке верхней пластины контейнера), возможен также случай, где донный участок посадочного выступа верхнего контейнера не садится надлежащим образом в вогнутый утопленный участок верхнего конца нижнего контейнера, и поэтому контейнеры перемещаются в направлении транспортировки в состоянии, в котором верхний контейнер наклонен относительно нижнего контейнера. Вместе с тем, в таком случае, если штабель контейнеров может быть опущен на место назначения посредством автоматического устройства для хранения и извлечения, то, поскольку крайний сверху контейнер в штабеле контейнеров наклонен, в случае, где еще один контейнер передается на ранее уложенный штабель контейнеров, также существует вероятность, что процесс передачи не удастся осуществить надежно и безопасно. Следовательно, если на стадии, где штабель контейнеров транспортируют по пути транспортировки, штабель контейнеров, в котором штабелирование не осуществлено надлежащим образом, можно автоматически обнаруживать надежно, анормальный штабель контейнеров автоматически отбраковывается, вследствие чего не устанавливается на площадку для складирования и хранения, и/или анормальный штабель контейнеров корректируют, переводя в состояние надлежащего штабелирования, например, посредством ручной операции, и анормальный штабель контейнеров затем оказывается на пути транспортировки, вследствие чего появляется возможность избежать неудобной ситуации, ожидаемой сбоку на площадке для складирования и хранения контейнеров. Вместе с тем, практическое средство, посредством которого можно решить такую проблему, еще не придумано.
Решение задачи
[0004] В данном изобретении предложено устройство обнаружения анормальностей для штабеля контейнеров, которое может решить традиционную задачу, описанную выше, а для просты понимания связи с вариантом осуществления, который будет описан ниже, устройство обнаружения анормальностей для штабеля контейнеров, соответствующее данному изобретению, будет проиллюстрировано со ссылками на позиции чертежей, используемые для описания варианта осуществления и указываемые в скобках. В устройстве обнаружения анормальностей для штабеля контейнеров, в штабеле (8) контейнеров, множество контейнеров (1), у которых поверхность (6) отображения кода, где записана информация о контейнере, обеспечена в некотором фиксированном положении на боковой внешней поверхности штабелируемого контейнера (1), штабелированы так, что поверхности (6) отображений кодов расположены на одной и той же стороне, а средство (12) считывания кодов, которое захватывает изображения поверхностей (6) отображения кодов на соответственных контейнерах (1) в штабеле (8) контейнеров, расположено у пути (10) транспортировки, по которому штабель (8) контейнеров транспортируют, и так, что поверхности (6) отображений кодов ориентированы параллельно направлению транспортировки, дополнительно обеспечено средство (18) обработки вычислений, в которое вводятся считываемые данные из средства (12) считывания кодов, причем средство (18) обработки вычислений обнаруживает - из считываемых данных каждой из поверхностей (6) отображений кодов - значение координаты положения по меньшей мере одной фиксированной точки (по меньшей мере одной из точек A-D) на каждой из поверхностей (6) отображений кодов, а из значения координаты положения в каждом из контейнеров (1) определяется анормальность штабелирования в штабеле (8) контейнеров.
[0005] То есть, когда штабелирование является надлежащим, поскольку поверхности отображений кодов на всех штабелированных контейнерах выровнены в вертикальном направлении, а они параллельны друг другу и по одной фиксированной точке на соответственных поверхностях отображений кодов также выровнены на мнимой вертикальной линии. Вместе с тем, когда, среди штабелированных контейнеров есть контейнер, который перемещен в направлении транспортировки, фиксированные точки поверхностей отображений кодов в соответственных контейнерах не выровнены на мнимой вертикальной линии, проходящей через фиксированную точку в крайнем снизу контейнере. В дополнение к этому, как описывается ниже, возможен также случай, где контейнер включает в себя донный участок (4) посадочного выступа, причем донный участок (4) посадочного выступа верхнего контейнера не посажен надлежащим образом в участок проема верхнего конца (5) в нижнем контейнере, и поэтому верхний контейнер отображается в направлении транспортировки в состоянии, в котором верхний контейнер наклонен относительно нижнего контейнера. Вместе с тем, в таком случае не только фиксированные точки поверхностей отображений кодов в соответственных контейнерах на выровнены на мнимой вертикальной линии, проходящей через фиксированную точку, в крайнем снизу контейнере, но и изменяется также интервал между фиксированными точками соответственных контейнеров. Изменение положения фиксированных точек, описанных выше, обнаруживается посредством обработки считываемых данных из средства считывания кодов средством обработки вычислений, и поэтому оказывается возможным определение анормальности штабелирования.
Полезные эффекты изобретения
[0006] В большом количестве штабелируемых контейнеров, используемых на заводе или аналогичном предприятии, для управления самими контейнерами, управления запасами хранимых изделий и т.п., в общем случае, содержащая записываемый код информация о контейнере, такая, как конкретный номер каждого контейнера, то есть, поверхность отображения кода, такая, как содержащая одномерный штрих-код или двумерный матричный штрих-код, обеспечена в фиксированном положении на боковой внешней поверхности. В соответствии с вышеописанной конфигурацией данного изобретения, поверхность отображения кода, которая в общем случае обеспечена в фиксированном положении на боковой внешней поверхности штабелируемого контейнера, и средство считывания кодов, которое используется для считывания информации о контейнере с поверхности отображения кода, используются как есть, и поэтому появляется возможность автоматически определять, оказывается состояние штабеля контейнеров на пути транспортировки состоянием надлежащего или анормального штабелирования. Следовательно, когда определяют, что состояние оказывается, например, состоянием анормального штабелирования, штабель контейнеров снимают сверху пути транспортировки либо вручную, либо посредством машины-автомата, или последующее средство переключения пути автоматически переключается таким образом, что анормальный штабель контейнеров подается в другое место сбора, и т.д., вследствие этого становится возможным прерывание подачи на площадку для складирования и хранения, как описано выше. Поэтому, по сравнению со случаем построения специализированной системы, которая захватывает изображение всего штабеля контейнеров, чтобы определить из этого изображения, приемлемым или анормальным оказывается состояние штабелирования, посредством системы, которая предусматривает использование обычно используемых устройств и воплощение которой можно сделать относительно недорогим, появляется возможность точно определять штабель контейнеров, в котором состояние штабелирования оказывается анормальным, и вследствие этого можно принять необходимые меры.
[0007] Конкретно, в случае воплощения данного изобретения, средству (18) обработки вычислений можно придать такую конфигурацию, что средство (18) обработки вычислений будет вычислять - из значения координаты положения одной фиксированной точки (одной из точек A-D) на поверхности (6) отображения кода в каждом из контейнеров (1) - величину позиционного смещения между соответственными контейнерами (1) в направлении транспортировки, вычислять, находится ли величина позиционного смещения в пределах допустимого диапазона, и определять анормальность штабелирования, когда величина позиционного смещения превышает допустимый диапазон. В дополнение к этому, как описано выше, также для состояния анормального штабелирования, в котором верхний контейнер наклонен относительно нижнего контейнера, что обуславливается случаем, где контейнер включает в себя донный участок посадочного выступа, средству (18) обработки вычислений также можно придать такую конфигурацию, что средство (18) обработки вычислений будет вычислять - из значений координат положения двух фиксированных точек (двух из точек A-D) на поверхности (6) отображения кода в каждом из контейнеров (1) - угол наклона каждого из контейнеров (1) относительно направления транспортировки, вычислять - из угла наклона каждого из контейнеров (1) - величину смещения по углу наклона между соответственными контейнерами (1), и определять анормальность штабелирования, когда величина смещения по углу наклона превышает допустимый диапазон. В частности, даже в ситуации, где малое изменение угла трудно получить последним способом получения изменения угла, потому что при осуществлении этого способа значения координат положения двух фиксированных точек преобразуются в угол наклона, в соответствии с первым способом обнаружения смещения одной фиксированной точки отметим, что упомянутый способ предусматривает сравнение значения координаты положения одной фиксированной точки самой, и поэтому оказывается возможным точное получение даже малого изменения угла в контейнерах, а вследствие этого становится возможным высокоточное воплощение данного изобретения.
[0008] Кроме того, когда воплощение таково, что из считываемых данных поверхности (6) отображения кода, изображение которой захватывается средством (12) считывания кодов, угол поверхности (6) отображения кода задают для фиксированной точки и определяют значение координаты ее положения, не обязательно заново отображать обнаружение фиксированной точки на внутренней стороне или внешней стороне поверхности отображения кода, и поэтому поверхность отображения кода, где записана информация о контейнере, можно использовать как есть, в результате чего воплощение данного изобретения реализовать легче.
[0009] Хотя считывание поверхности (6) отображения кода в штабеле (8) контейнеров можно проводить для штабеля (8) контейнеров, который движется по пути (10) транспортировки, посредством конфигурации, в которой штабель (8) контейнеров, транспортируемый по пути (10) транспортировки, временно останавливается в положении, в котором все поверхности (6) отображения кодов в штабеле (8) контейнеров присутствуют в пределах области (15a) захвата изображения средства (12) считывания кодов, а для штабеля (8) контейнеров в состоянии останова, изображения поверхностей (6) отображения кодов захватываются средством (12) считывания кодов, и можно легко реализовать правильное считывание.
[0010] Кроме того, средству (12) считывания кодов можно придать такую конфигурацию, что средство (12) считывания кодов будет сформировано посредством обеспечения считывателей (15) кодов, выполненных с возможностью считывания с поверхности (6) отображения кода одного контейнера (1) или с поверхностей (6) отображения кодов множества контейнеров (1), штабелированных во множестве вертикальных ярусов. В соответствии с этой конфигурацией, даже в случае, где высота одного контейнера велика или штабелировано большое количество контейнеров, а высоту области захвата изображений средства считывания кодов нужно увеличивать, области захвата изображений соответственных считывателей кодов во множестве вертикальных ярусов собраны в направлении высоты, и поэтому высоту области захвата изображений во всем средстве считывания кодов можно сделать достаточно высокой, следовательно, по сравнению со случаем, где средство считывания кодов расположено далеко сбоку от пути транспортировки для штабеля контейнеров, чтобы увеличить высоту области захвата изображений, положение фиксированной точки можно обнаруживать с высокой точностью без снижения разрешения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] На фиг.1A представлен вид в перспективе с частичным вырезом, иллюстрирующий штабелируемый контейнер, а на фиг.1B представлен вид сбоку, иллюстрирующий состояние, где штабель контейнеров на пути транспортировки находится в фиксированном положении останова.
На фиг.2A представлен вид спереди, иллюстрирующий штабель контейнеров, показанный на фиг.1B, средство считывания кодов и систему управления, а на фиг.2B представлен вид спереди, иллюстрирующий вариант осуществления, в котором средство считывания кодов выполнено с двумя - верхним и нижним - считывателями кодов.
На фиг.3A представлен вид сбоку, иллюстрирующий поверхности отображения кодов, с которых надлежит проводить считывание, и область захвата изображений в штабеле контейнеров, а на фиг.3B представлен вид сбоку, иллюстрирующий состояние, где соответственные контейнеры в штабеле контейнеров, показанных на фиг.3A, совершили относительное перемещение в направлении транспортировки (направлении Y).
На фиг.4A представлен вид сбоку, иллюстрирующий состояние, где крайний сверху контейнер в штабеле контейнеров, показанном на фиг.3A, не посажен надлежащим образом, а на фиг.4B представлен вид сбоку, иллюстрирующий состояние, где средний контейнер в штабеле контейнеров, показанном на фиг.3A, не посажен надлежащим образом относительно крайнего снизу контейнера.
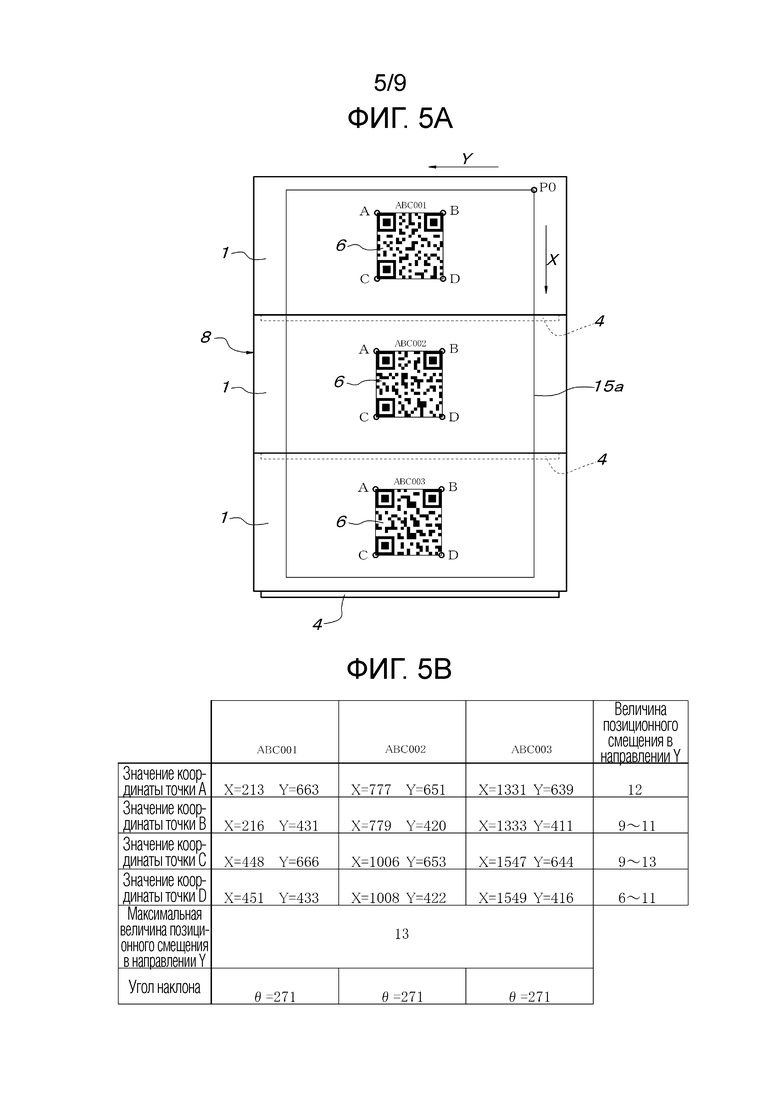
На фиг.5A представлен вид сбоку, схематически иллюстрирующий соответственные поверхности отображения кодов и область захвата изображений в штабеле контейнеров, показанном на фиг.3A, а на фиг.5B представлена числовая таблица, иллюстрирующая результаты считывания с соответственных поверхностей отображения кодов, показанных на фиг.5A.
На фиг.6A представлен вид сбоку, схематически иллюстрирующий соответственные поверхности отображения кодов и область захвата изображений в штабеле контейнеров, показанном на фиг.3B, а на фиг.6B представлена числовая таблица, иллюстрирующая результаты считывания с соответственных поверхностей отображения кодов, показанных на фиг.6A.
На фиг.7A представлен вид сбоку, схематически иллюстрирующий соответственные поверхности отображения кодов и область захвата изображений в штабеле контейнеров, показанном на фиг.4A, а на фиг.7B представлена числовая таблица, иллюстрирующая результаты считывания с соответственных поверхностей отображения кодов, показанных на фиг.7A.
На фиг.8A представлен вид сбоку, схематически иллюстрирующий соответственные поверхности отображения кодов и область захвата изображений в штабеле контейнеров, показанном на фиг.4B, а на фиг.8B представлена числовая таблица, иллюстрирующая результаты считывания с соответственных поверхностей отображения кодов, показанных на фиг.8A.
На фиг.9 представлено блок-схема последовательности операций, иллюстрирующая процедуру управления.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0012] Как показано на фиг.1A, штабелируемый контейнер 1 представляет собой коробчатый контейнер, форма которого является прямоугольной и который изготовлен из синтетической смолы и включает в себя верхний фланцевый участок 2, который горизонтально выступает из всей периферии верхнего конца вбок наружу, нижний фланцевый участок 3, который горизонтально выступает из всей периферии нижнего конца вбок наружу, и донный участок 4 посадочного выступа, образованный ребром, которое обеспечено выступающим в виде прямоугольной рамы из поверхности дна вровень с нижней поверхностью нижнего фланцевого участка 3. Когда штабелируют одинаковые контейнеры 1, донный участок 4 посадочного выступа верхнего контейнера 1 можно сажать в прямоугольный участок 5 проема, окруженный верхним фланцевым участком 2 нижнего контейнера. На внешнюю поверхность участка 1а одной боковой стенки, параллельного продольному направлению контейнера 1, среди участков четырех боковых стенок контейнера 1 наклеена этикета 7, на которой отпечатана поверхность 6 отображения кода.
[0013] Код, отображаемый на поверхности 6 отображения кода, используется для записи конкретной информации о контейнере, такой, как конкретный номер, размеры и т.п. контейнера 1, а в иллюстрируемом варианте осуществления показан двумерный код в форме, по существу, квадратной матрицы; вместе с тем, можно использовать одномерный штрих-код в форме полосок или аналогичный ему. Этикетка 7, на которой отпечатана поверхность 6 отображения кода, наклеена так, что и верхняя, и нижняя стороны четырехугольной поверхности 6 отображения кодов параллельны обоим - верхнему и нижнему фланцевым участкам 2 и 3 контейнера 1, и что поверхность 6 отображения кода правильно расположена в фиксированном положении в центральной части на участке 1a боковой стенки контейнера 1.
[0014] Как показано на фиг.1B и 2A, требуемое количество контейнеров 1 (в иллюстрируемом примере - три) штабелированы, как описано выше, причем они ориентированы так, что участки 1а боковых стенок, к которым приклеены этикетки 7, расположены на одной и той же стороне при образовании одного штабеля 8 контейнеров, и упомянутый штабель 8 контейнеров транспортируют по пути 10 транспортировки, который образован, например, роликовым транспортером 9. Штабель 8 контейнеров транспортируют по пути 10 транспортировки, например, к площадке для складирования и хранения, причем, как описано выше, на площадке для складирования и хранения участки 1а боковых стенок контейнеров 1, на которые приклеены этикетки 7, находятся в состоянии, в котором они обращены вбок от пути 10 транспортировки. Позиция 11 обозначает направляющую контейнеров, которая уложена с обеих - левой и правой - сторон от пути 10 транспортировки параллельно направлению транспортировки.
[0015] Как показано на фиг.2A, на некотором расстоянии по пути 10 транспортировки задано фиксированное положение 13 останова для штабеля 8 контейнеров, предусматривающее наличие средства 12 считывания кодов. Средство 12 считывания кодов выполнено с одним считывателем 15 кодов, которому служит опорой опорный элемент 14, обеспеченный стоящим возле пути 10 транспортировки, и имеет, как показано на фиг.1B, вертикально простирающуюся прямоугольную область 15а захвата изображений, где изображения всех поверхностей 6 отображения кодов (в иллюстрируемом примере - три поверхности 6 отображения кодов) на множестве вертикальных ярусов в штабеле 8 контейнеров, который остановлен в фиксированном положении 13 останова, можно захватывать одновременно. В фиксированном положении 13 останова расположен датчик 16, который обнаруживает, например, переднюю сторону штабеля 8 контейнеров, когда штабель 8 контейнеров прибывает в фиксированное положение 13 останова. Иллюстрируемый датчик 16 представляет собой, например, оптический датчик, работающий на просвет, который выдает сигнал 16d обнаружения прибытия в фиксированное положение для штабеля 8 контейнеров, когда передняя сторона штабеля 8 контейнеров прерывает оптическую ось 16c между проектором 16a света и приемником 16b света, вместе с тем, можно позаимствовать оптический датчик, такой, как оптический датчик отражательного типа, конфигурация которого может быть любой.
[0016] Как показано на фиг.2A, средство 17 привода для роликового транспортера 9, средство 12 считывания кодов (считыватель 15 кодов) и датчик 16 соединены со средством 18 обработки вычислений, а упомянутое средство 18 обработки вычислений осуществляет управление, показанное на блок-схеме последовательности операций согласно фиг.9. То есть, когда сигнал 16d обнаружения прибытия в фиксированное положение для штабеля 8 контейнеров выдается из датчика 16, средство 18 обработки вычислений выдает сигнал 19а останова в средство 17 привода роликового транспортера 9, роликовый транспортер 9 автоматически останавливается, и поэтому штабель 8 контейнеров останавливается в фиксированном положении 13 останова (этап S1 на блок-схеме последовательности операций согласно фиг.9). В соответствии с остановом штабеля 8 контейнеров в фиксированном положении 13 останова, средство 18 обработки вычислений выдает сигнал 19b команды считывания в считыватель 15 кодов, упомянутый считыватель 15 кодов осуществляет считывание (этап S2 на блок-схеме последовательности операций согласно фиг.9) с соответственных поверхностей 6 отображения кодов на штабеле 8 контейнеров, остановленном в фиксированном положении 13 останова, и считыватель 15 кодов передает сигнал 19с считывания кода в средство 18 обработки вычислений.
[0017] Как показано на фиг.3 и 4, область 15a захвата изображений считывателя 15 кодов должен быть вертикально простирающимся прямоугольником, вместе с тем, вообще говоря, когда область захвата изображений считывателя 15 кодов переводится в вертикальное положение, область захвата изображений считывателя 15 кодов оказывается поперечно простирающимся прямоугольником. В таком случае, достаточно установить считыватель 15 кодов, поворачивая его на 90 градусов таким образом, что область 15a захвата изображений становится вертикально простирающимся прямоугольником. В этом варианте осуществления, считыватель 15 кодов, который имеет разрешение 1200 по вертикали × 1600 в поперечном направлении (пикселей на дюйм), поворачивают на 90 градусов, образуя средство 12 считывания кодов. Следовательно, сигнал 19c считывания кода, передаваемый из считывателя 15 кодов в средство 18 обработки вычислений, представляет собой данные изображения, полученные посредством захвата в одном изображении трех поверхностей 6 отображения кодов, выровненных в направлении вверх-вниз штабеля 8 контейнеров, а средство 18 обработки вычислений анализирует эти данные изображения.
[0018] В нижеследующем описании, крайний сверху контейнер штабеля 8 контейнеров обозначен позицией 1a, средний контейнер обозначен позицией 1b, а крайний снизу контейнер обозначен позицией 1c. На фиг.3A показан штабель 8 контейнеров в состоянии надлежащего штабелирования, в котором средний и крайний сверху контейнеры 1b и 1а надлежащим образом посажены на нижележащие контейнеры 1b и 1c, соответственно. Следовательно, в посадочных частях участков 5 проемов нижних концов и посадочных выступах 4 донного участка в соответственных контейнерах 1a-1c получается люфт в горизонтальном направлении в двух измерениях, обеспечивающий плавную посадку и плавное высвобождение между контейнерами, а на фиг.3B показано состояние, где в штабеле 8 контейнеров, показанном на фиг.3A, средний и крайний сверху контейнеры 1b и 1a соответственно переместились вбок на наибольшее расстояние в направлении Y, параллельном направлению транспортировки, относительно их нижележащих контейнеров 1b и 1c в пределах диапазона люфта. Состояние, показанное на фиг.3B, находится в пределах диапазона состояния надлежащего штабелирования в штабеле 8 контейнеров. В штабеле 8 контейнеров, показанном на фиг.4A, крайний сверху контейнер 1a смещен относительно среднего контейнера 1b в направлении Y, параллельном направлению транспортировки, за допустимый предел, вследствие чего часть одного конца донного участка 4 посадочного выступа в крайнем сверху контейнере 1a в направлении Y движется по части одного конца участка 5 проема в среднем контейнере 1b в направлении Y, в результате чего штабель 8 контейнеров оказывается в состоянии анормального штабелирования. В штабеле 8 контейнеров, показанном на фиг.4B, средний контейнер 1b, надлежащим образом посаженный на крайний сверху контейнер 1a, смещен относительно крайнего снизу контейнера 1c в направлении Y, параллельном направлению транспортировки за допустимый предел, и поэтому часть одного конца донного участка 4 посадочного выступа в среднем контейнере 1b в направлении Y движется по части одного конца участка 5 проема в крайнем снизу контейнере 1c в направлении Y, в результате чего штабель 8 контейнеров оказывается в состоянии анормального штабелирования.
[0019] Далее, со ссылками на фиг.5-8, будет описана обработка вычислений в средстве 18 обработки вычислений, которая осуществляется после того, как средство 12 считывания кодов (считыватель 15 кодов) проведет считывание с поверхностей 6 отображения кодов соответственных контейнеров 1a-1c в штабелях 8 контейнеров в соответственных состояниях, показанных на фиг.3A-4B. На основании данных изображения, полученных из средства 12 считывания кодов, средство 18 обработки вычислений считывает конкретные номера соответственных контейнеров 1a-1c в штабеле 8 контейнеров, в данном случае - конкретный номер ABC001 крайнего сверху контейнера 1a, конкретный номер ABC002 среднего контейнера 1b и конкретный номер ABC003 крайнего снизу контейнера 1c, и одновременно считывает значения координат положения фиксированных точек A-D в четырех углах поверхностей 6 отображения кодов в соответственных контейнерах 1a-1c. Значения координат положения фиксированных точек A-D - это значения координат X-Y фиксированных точек A-D в четырех углах каждой поверхности 6 отображения кодов в пределах области 15a захвата изображений, когда участок одного угла (хотя речь может идти о любом угле, в иллюстрируемом примере имеется в виду участок угла, являющегося верхним правым углом) в пределах имеющей четыре угла области 15a захвата изображений в считывателе 15 кодов полагается являющимся точкой P0 начала отсчета, значение координаты по оси увеличивается по вертикали вниз от точки P0 начала отсчета, а значение координаты по оси Y увеличивается по горизонтали влево от точки P0 начала отсчета.
[0020] Даже в штабеле 8 контейнеров в состоянии надлежащего штабелирования, показанном на фиг.3A (фиг.5A), как указано в числовой таблице согласно фиг.5B, учтены погрешности в значениях координаты Y точки A и точки C и значениях координаты Y точки B и точки D, которые теоретически должны быть одним и тем же значением, и это обусловлено люфтом в направлении Y между донным участком 4 посадочного выступа в верхнем контейнере и участком 5 проема в нижнем контейнере, а также обусловлено погрешностями в точности изготовления соответственных контейнеров или погрешностью в положении наклеивания этикетки 7, и т.п. В данном случае, установлено, что смещение в направлении Y между контейнерами 1a и 1b и между контейнерами 1b и 1c, которые являются смежными друг с другом по вертикали, составляет максимум 13 (пикселей/дюйм). В штабеле 8 контейнеров в штабелированном состоянии в пределах надлежащего диапазона, показанном на фиг.3B (фиг.6A), установлено, что смещение в направлении Y между контейнерами 1a и 1b и между контейнерами 1b и 1c, которые являются смежными друг с другом по вертикали, составляет максимум 23 (пикселя/дюйм). Иными словами, когда максимальная величина позиционного смещения d в направлении Y между контейнерами 1a и 1b и между контейнерами 1b и 1c, которые являются смежными друг с другом по вертикали, составляет, например, 30 (пикселей/дюйм) или менее, состояние штабелирования можно определить как состояние надлежащего штабелирования. Угол θ наклона, показанный в каждой числовой таблице, представляет собой угол наклона, указанный на каждой поверхности 6 отображения кодов, а значение угла θ наклона, показанное в иллюстрируемой числовой таблице, представляет собой угол отрезка прямой между точкой A и точкой B (или точкой C и точкой D) на поверхности 6 отображения кода в направлении против часовой стрелки, если смотреть от точки B (или точки D), находящейся рядом с точкой P0 начала отсчета. Значение угла θ наклона вычисляют на основании разницы в значении координаты Х между точкой A и точкой B (или точкой C и точкой D) интервала в направлении Y между точкой A и точкой B (или точкой C и точкой D) и разрешения съемочной камеры считывателя 15 кодов. В примерах согласно фиг. 5 и 6, угол θ наклона составляет 271 градус. Разумеется, вышеописанный угол θ наклона поверхности отображения кода можно обнаруживать как угол наклона отрезка прямой между точкой A и точкой C (или точкой B и точкой D) на поверхности 6 отображения кода.
[0021] В штабелях 8 контейнеров в состояниях анормального штабелирования, показанных на фиг.4A (фиг.7A) и фиг.4B (фиг.8A), как указано в числовых таблицах, показанных на фиг.7B и 8B, максимальные величины позиционных смещений d в направлении Y между двумя контейнерами 1a и 1b и между двумя контейнерами 1b и 1c, которые являются смежными друг с другом по вертикали, соответственно составляют 57 (пикселей/дюйм) и 60 (пикселей/дюйм) и, как описано выше, когда допустимый предел для величины позиционного смещения d в направлении Y задан составляющим 30 (пикселей/дюйм), в отношении штабелей 8 контейнеров, показанных на фиг.4A (фиг.7A) и фиг.4B (фиг.8A) можно определить их состояние как состояние анормального штабелирования. Кроме того, в штабелях 8 контейнеров, показанных на фиг.4A (фиг.7A) и на фиг.4B (фиг.8A), угол θ наклона поверхности 6 отображения кода отличается от углов θ наклона других поверхностей 6 отображения кодов лишь на 2 градуса. Следовательно, если можно предположить, что в положении наклеивания этикеток 7 почти нет изменений, а этикетки 7 наклеены правильно, в случае, где погрешность угла наклона θ поверхности 6 отображения кода равна, например, 2 градусам или меньше, в отношении штабеля контейнеров также можно определить состояние анормального штабелирования.
[0022] То есть, когда считыватель 15 кодов считывает данные изображения в пределах области 15a захвата изображений, включая поверхности 6 отображения кодов в соответственных контейнерах 1a-1c (этап S2 на блок-схеме последовательности операций согласно фиг.9), средство 18 обработки вычислений, которое приняло сигнал 19c считывания кода, анализирует данные изображения, чтобы обнаружить значения координат точек A-D на соответственных поверхностях 6 отображения кодов (этап S3 на блок-схеме последовательности операций согласно фиг.9) и вычисляет величину позиционного смещения в направлении Y на основании значений координат точек A-D (этап S4 на блок-схеме последовательности операций согласно фиг.9). Затем определяют, оказывается ли величина позиционного смещения в направлении Y в пределах допустимого диапазона (этап S5 на блок-схеме последовательности операций согласно фиг.9), и когда величина позиционного смещения оказывается в пределах допустимого диапазона, как показано на фиг.2A, средство 18 обработки вычислений передает сигнал 19е повторного запуска в средство 17 привода для роликового транспортера 9 с целью повторного запуска роликового транспортера 9, и подает наружу штабель 8 контейнеров, который остановлен в фиксированном положении 13 останова (этап S6 на блок-схеме последовательности операций согласно фиг.9). Когда на вышеописанном этапе S5 определено, что величина смещения в направлении Y превышает допустимый диапазон, как показано на фиг.2A, средство 18 обработки вычислений обнаруживает сигнал 19f обнаружения анормальности штабелирования, и поэтому затем - на основании сигнала 19f обнаружения анормальности штабелирования - принимает меры с целью справиться с анормальностью штабелирования (этап S7 на блок-схеме последовательности операций согласно фиг.9), а вышеописанный этап S6 проводит уже затем.
[0023] Когда меры, имеющие целью справиться с анормальностью штабелирования на основании сигнала 19f обнаружения анормальности штабелирования, воплощают, например, посредством активации аварийного сигнала для уведомления дежурного оператора о ситуации, или посредством других средств, состояние штабелирования штабеля 8 контейнеров при анормальности штабелирования корректируют вручную в состоянии, в котором штабель 8 контейнеров расположен в фиксированном положении останова, или после подачи штабеля 8 контейнеров наружу в заранее определенное положение посредством повторного запуска роликового транспортера 9. Разумеется, коррекцию состояния штабелирования можно также проводить посредством специализированной машины-автомата. Отметим, что вместо вышеописанного этапа S4 можно обнаруживать значения координат точек A-D на поверхности 6 отображения кодов на этапе S3, и поэтому угол смещения соответственных поверхностей 6 отображения кодов вычисляют исходя из значений координат точек A-D (этап S8 на блок-схеме последовательности операций согласно фиг.9), в результате чего появляется также возможность обнаруживать на этапе 5, оказывается ли величина смещения в пределах допустимого диапазона.
[0024] Отметим, что в случае, где количество штабелированных контейнеров 1, образующих штабель 8 контейнеров, велико, или в случае, где сама высота контейнера 1 велика и поэтому необходимая высота области 15a захвата изображений в считывателе 15 кодов увеличивается, как показано на фиг.2B, через подходящие интервалы в направлении вверх-вниз располагают два или более считывателей 15 кодов, образуя средство 12 считывания кодов, и в этом направлении вверх-вниз оказываются сосредоточенными области 15a захвата изображений в считывателях 15 кодов, вследствие чего появляется возможность формирования области захвата изображений, высота которой велика. Хотя в варианте осуществления, в состоянии, в котором штабель 8 контейнеров только что остановлен в фиксированном положении 13 останова на пути 10 транспортировки, средство 12 считывания кодов осуществляет считывание с поверхностей 6 отображения кодов контейнеров 1 соответственных ярусов в штабеле 8 контейнеров, можно предусмотреть такую конфигурацию, что средство 12 считывания кодов будет осуществлять считывание с поверхностей 6 отображения кодов контейнеров 1 соответственных ярусов в штабеле 8 контейнеров, который движется по пути 10 транспортировки (и его движение можно также замедлить).
[0025] В дополнение к этому, хотя контейнер 1, описанный в варианте осуществления, о котором шла речь выше, имеет конструкцию, при наличии которой во время штабелирования донный участок 4 посадочного выступа может быть посажен в вогнутый утопленный участок, такой, как прямоугольный участок 5 проема в нижнем контейнере, когда к контейнеру применимо данное изобретение, при условии, что контейнеры являются штабелируемыми (включая контейнер, которые можно складывать, когда они не используются), на конструкцию и материал таких контейнеров, как имеющие плоскую поверхность дна, не имеющую донный участок 4 посадочного выступа, ограничений нет.
Промышленная применимость
[0026] Устройство обнаружения анормальностей для штабеля контейнеров, соответствующее данному изобретению, можно использовать как средство для сортировки в случае, если штабель контейнеров, в котором штабелировано множество контейнеров, транспортируют, например, на площадку для складирования и хранения, а штабель контейнеров не штабелирован надлежащим образом.
Перечень позиций
[0027]
1, 1a-1c Контейнер
2 Верхний фланцевый участок
3 Нижний фланцевый участок
4 Донный участок посадочного выступа
5 Участок проема
6 Поверхность отображения кодов
7 Этикетка
8 Штабель контейнеров
9 Роликовый транспортер
10 Путь транспортировки
12 Средство считывания кодов
13 Фиксированное положение останова
15 Считыватель кодов
15a Область захвата изображений
16 Датчик
17 Средство привода транспортера
18 Средство обработки вычислений








Устройство обнаружения анормальностей для штабеля контейнеров определяет анормальность штабелирования в штабеле (8) контейнеров на пути (10) транспортировки. Множество контейнеров (1), каждый из которых обеспечен поверхностью (6) отображения кода, на которой информация о контейнере записана в фиксированном положении и которая обеспечена на боковой внешней поверхности упомянутого контейнера, штабелированы так, что их поверхности (6) отображений кодов расположены на одной и той же стороне, вследствие чего и образуется штабель (8) контейнеров. Сбоку у пути (10) транспортировки расположено средство (12) считывания кодов, которое захватывает изображение поверхности (6) отображения кода на каждом из контейнеров (1) в штабеле контейнеров. Транспортировка штабеля (8) контейнеров по упомянутому пути (10) транспортировки происходит так, что поверхности (6) отображения кодов ориентированы параллельно направлению транспортировки. Считываемые данные из средства (12) считывания кодов вводятся в средство (18) обработки вычислений, которое обнаруживает - из считываемых данных каждой из поверхностей (6) отображений кодов - значение координаты положения по меньшей мере одной фиксированной точки на каждой из поверхностей (6) отображений кодов, а из значений координат положения определяется анормальность штабелирования в штабеле (8) контейнеров. Технический результат заключается в повышении эффективности процесса штабелирования. 2 н. и 3 з.п. ф-лы,17 ил. 
1. Устройство обнаружения анормальностей для штабеля (8) контейнеров, в котором в штабеле контейнеров множество контейнеров (1), у которых поверхность (6) отображения кода, где записана информация о контейнере, обеспечена в фиксированном положении на боковой внешней поверхности штабелируемого контейнера (1), штабелированы так, что поверхности (6) отображений кодов расположены на одной и той же стороне, и которое определяет анормальность штабелирования в штабеле (8) контейнеров сбоку у пути (10) транспортировки, где штабель (8) контейнеров транспортируется так, что поверхности (6) отображения кодов ориентированы параллельно направлению транспортировки,
причем сбоку у пути (10) транспортировки расположено средство (12) считывания кодов, которое захватывает изображения поверхностей (6) отображения кодов на соответствующих контейнерах (1) в штабеле (8) контейнеров,
дополнительно обеспечено средство (18) обработки вычислений, в которое вводятся считываемые данные из средства (12) считывания кодов,
средство (18) обработки вычислений, выполнено с возможностью обнаружения - из считываемых данных каждой из поверхностей (6) отображений кодов - значения координаты положения по меньшей мере одной фиксированной точки на каждой из поверхностей (6) отображений кодов, и
определения из значения координаты положения в каждом из контейнеров (1) анормальности штабелирования в штабеле (8) контейнеров,
при этом средство (18) обработки вычислений вычисляет - из значений координат положения двух фиксированных точек, находящихся на поверхности (6) отображения кода в каждом из контейнеров (1), - фиксированное расстояние между ними в направлении транспортировки и угол наклона каждого из контейнеров (1) относительно направления транспортировки,
вычисляет - из угла наклона каждого из контейнеров (1) - величину смещения по углу наклона между соответственными контейнерами (1), и
определяет анормальность штабелирования, когда величина смещения по углу наклона превышает допустимый диапазон.
2. Устройство обнаружения анормальностей для штабеля (8) контейнеров, в котором в штабеле контейнеров множество контейнеров (1), у которых поверхность (6) отображения кода, где записана информация о контейнере, обеспечена в фиксированном положении на боковой внешней поверхности штабелируемого контейнера (1), штабелированы так, что поверхности (6) отображений кодов расположены на одной и той же стороне, и которое определяет анормальность штабелирования в штабеле (8) контейнеров сбоку у пути (10) транспортировки, где штабель (8) контейнеров транспортируется так, что поверхности (6) отображения кодов ориентированы параллельно направлению транспортировки,
причем сбоку у пути (10) транспортировки расположено средство (12) считывания кодов, которое захватывает изображения поверхностей (6) отображения кодов на соответствующих контейнерах (1) в штабеле (8) контейнеров,
дополнительно обеспечено средство (18) обработки вычислений, в которое вводятся считываемые данные из средства (12) считывания кодов,
средство (18) обработки вычислений, выполнено с возможностью обнаружения - из считываемых данных каждой из поверхностей (6) отображений кодов - значения координаты положения по меньшей мере одной фиксированной точки на каждой из поверхностей (6) отображений кодов, и
определения из значения координаты положения в каждом из контейнеров (1) анормальности штабелирования в штабеле (8) контейнеров,
при этом средство (12) считывания кодов образовано посредством обеспечения считывателей (15) кодов, выполненных с возможностью считывания с поверхности (6) считывания кода одного контейнера (1) или с поверхностей (6) считывания кодов множества контейнеров (1), штабелированных во множестве вертикальных ярусов.
3. Устройство по п.1 или 2,
в котором средство (18) обработки вычислений
вычисляет - из значения координаты положения одной фиксированной точки на поверхности (6) отображения кода в каждом из контейнеров (1) - величину позиционного смещения между соответственными контейнерами (1) в направлении транспортировки,
вычисляет, находится ли величина позиционного смещения в пределах допустимого диапазона, и
определяет анормальность штабелирования, когда величина позиционного смещения превышает допустимый диапазон.
4. Устройство по п. 1 или 2,
в котором из считываемых данных поверхности (6) отображения кода, изображение которой захвачено средством (12) считывания кодов, угол поверхности (6) отображения кодов задан соответствующим фиксированной точке и обнаружено значение ее координаты положения.
5. Устройство по п. 1 или 2,
в котором штабель (8) контейнеров, транспортируемый по пути (10) транспортировки, временно останавливается в положении, в котором все поверхности (6) отображения кодов в штабеле (8) контейнеров присутствуют в пределах области (15а) захвата изображений средства (12) считывания кодов, и
для штабеля (8) контейнеров в состоянии останова средство (12) считывания кодов захватывает изображения поверхностей (6) отображения кодов.
| Эксцентриковый колебатель для двух ситовых кузовов, приводимых в качательные, противоположно направленные движения | 1958 |
|
SU120729A1 |
| JP 2008156122 A, 10.07.2008 | |||
| JP 2012192490 A, 11.10.2012 | |||
| WO 2006001237 A1, 05.01.2006 | |||
| ВЕРТИКАЛЬНЫЙ ВИНТОВОЙ КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 1998 |
|
RU2130418C1 |

