Область техники
Настоящее изобретение относится к автомобилю и к способу управления автомобилем. Более конкретно изобретение относится к автомобилю, приводимому в движение мощностью, выдаваемой силовой установкой, а также к способу управления таким автомобилем.
Описание известного уровня техники
Один предложенный автомобиль приводит в действие электродвигатель, соединенный с ведущими колесами, и управляет им для приложения крутящего момента с проскальзыванием, соответствующего нажиму на педаль тормоза (см., например, Japanese Patent Laid-Open Gazette №10-75505). Этот автомобиль задает крутящий момент с проскальзыванием, соответствующий нажиму на педаль тормоза, для предотвращения непреднамеренного скатывания вниз на наклонной дороге, но движется на основе крутящего момента с проскальзыванием по горизонтальной дороге для повышения эффективности использования энергии.
Автомобиль прилагает крутящий момент с проскальзыванием только предварительно заданного уровня, когда водитель полностью отпускает педаль тормоза. Когда автомобиль стоит на восходящем склоне, уклон дорожной поверхности на восходящем склоне может приводить к скатыванию автомобиля вниз без регулирования скорости скатывания вниз.
Сущность изобретения
Таким образом, задачей изобретения является обеспечение регулирования скорости автомобиля, движущегося назад, в направлении, противоположном предварительно заданному направлению движения. Задачей изобретения также является обеспечение для водителя, по существу, неизменного ощущения управления автомобилем независимо от изменений уклона дорожной поверхности.
Для решения, по меньшей мере, части указанных выше задач автомобиль, соответствующий настоящему изобретению, имеет следующую конструкцию.
Автомобиль, соответствующий настоящему изобретению, приводится в движение мощностью, выдаваемой силовой установкой, и включает модуль задания направления движения, который предварительно задает направление движения автомобиля; модуль выявления движения назад, который выявляет движение автомобиля назад, в направлении, противоположном предварительно заданному направлению движения; и модуль управления движением, который задает корректирующий крутящий момент, прилагаемый в предварительно заданном направлении, и приводит в действие силовую установку и управляет ею для приложения корректирующего крутящего момента только в качестве реакции на задание направления движения модулем задания направления движения и обнаружение движения автомобиля назад, в направлении, противоположном предварительно заданному направлению движения при незадействованной педали акселератора, модулем выявления движения назад.
Автомобиль, соответствующий изобретению, задает корректирующий крутящий момент, прилагаемый в предварительно заданном направлении движения, и приводит в действие силовую установку и управляет ею для приложения корректирующего крутящего момента в качестве реакции на выявление движения автомобиля назад, в направлении, противоположном предварительно заданному направлению движения, с незадействованным акселератором. Это устройство эффективно регулирует скорость автомобиля, движущегося назад, то есть в направлении скатывания вниз.
В автомобиле, соответствующем изобретению, может также применяться модуль измерения оценочного уклона дорожной поверхности, который измеряет или оценивает уклон дорожной поверхности, и модуль управления движением может задавать корректирующий крутящий момент на основе измеренного или оцененного значения уклона дорожной поверхности. Это устройство задает корректирующий крутящий момент на основе уклона дорожной поверхности и таким образом обеспечивает для водителя, по существу, неизменное ощущение при вождении, независимо от изменений уклона дорожной поверхности.
В одном предпочтительном варианте выполнения автомобиля, соответствующего изобретению, который задает корректирующий крутящий момент на основе уклона дорожной поверхности, модуль управления движением задает корректирующий крутящий момент в соответствии с картой, которая представляет изменение корректирующего крутящего момента относительно уклона дорожной поверхности для приведения скорости автомобиля с одним водителем, едущим в нем назад, к предварительно заданному уровню скорости автомобиля.
В автомобиле, соответствующем изобретению, который задает корректирующий крутящий момент на основе уклона дорожной поверхности, также может применяться модуль задания исходного крутящего момента, который задает исходный крутящий момент, прилагаемый в предварительно заданном направлении движения на основе измеренного или оцененного уклона дорожной поверхности, и модуль управления движением приводит в действие силовую установку и управляет ею для приложения исходного крутящего момента в состоянии отсутствия нажима на педаль тормоза, когда автомобиль стоит на месте. Это устройство эффективно предотвращает непредвиденное скатывание автомобиля вниз.
В автомобиле, соответствующем изобретению, модуль выявления движения назад может измерять скорость автомобиля при движении назад, и модуль управления движением может задавать корректирующий крутящий момент для приведения измеренной скорости автомобиля при движении назад к заданному уровню скорости автомобиля. Это устройство регулирует скорость автомобиля при движении назад до получения предварительно заданного уровня скорости автомобиля. Предварительно заданный уровень скорости автомобиля может быть равен, например, скорости пешехода.
В автомобиле, соответствующем изобретению, также может применяться модуль задания крутящего момента с проскальзыванием, который задает крутящий момент с проскальзыванием, прилагаемый в предварительно заданном направлении движения, когда удовлетворяется заданное условие, и модуль управления движением может приводить в действие силовую установку и управлять ею для приложения большего крутящего момента из корректирующего крутящего момента и крутящего момента с проскальзыванием. Это устройство хорошо балансирует обычное управление автомобилем, основанное на крутящем моменте с проскальзыванием, и управление автомобилем, основанное на корректирующем крутящем моменте.
В автомобиле, соответствующем изобретению, оснащенном модулем задания крутящего момента с проскальзыванием, модуль задания крутящего момента с проскальзыванием может задавать значение "0" крутящего момента с проскальзыванием в качестве реакции на операцию торможения и снижение скорости автомобиля до нуля и устанавливать заданный уровень крутящего момента с проскальзыванием в качестве реакции на выявление отсутствия нажима на педаль тормоза. Это устройство желательным образом ограничивает выдачу ненужного крутящего момента с проскальзыванием, таким образом повышая эффективность использования энергии.
В автомобиле, соответствующем изобретению, модуль управления движением может отключать корректирующий крутящий момент, реагируя на сброс газа после нажима на педаль акселератора. Это устройство эффективно предотвращает резкую нагрузку от крутящего момента благодаря отключению корректирующего крутящего момента.
В автомобиле, соответствующем настоящему изобретению, силовая установка может включать электродвигатель, который принимает мощность от оси и выдает мощность на ось. Это устройство регулирует выходной крутящий момент от электродвигателя для приложения корректирующего крутящего момента.
В автомобиле, соответствующем изобретению, силовая установка может включать двигатель внутреннего сгорания, электродвигатель с приводным валом, который принимает мощность от приводного вала, соединенного с осью, и выдает мощность на приводной вал, модуль передачи мощности, который передает мощность от выходного вала двигателя внутреннего сгорания на приводной вал посредством входной и выходной мощности на основе электроэнергии, и модуль управления движением может управлять двигателем внутреннего сгорания, электродвигателем с приводным валом и модулем передачи мощности для передачи мощности, соответствующей заданному замедлению движения, на приводной вал.
В одном предпочтительном варианте выполнения автомобиля, соответствующего изобретению, снабженного силовой установкой, включающей двигатель внутреннего сгорания, электродвигатель с приводным валом и модуль передачи мощности, модуль передачи мощности имеет модуль ввода/вывода мощности трехвального типа, который соединен с выходным валом двигателя внутреннего сгорания, приводным валом и вращающимся валом и принимает мощность от одного третьего вала и передает мощность на него в соответствии с приемом мощности от любых двух из трех валов и передачей мощности на них; и электродвигатель с вращающимся валом, который принимает мощность на вращающийся вал и передает мощность от него.
В другом предпочтительном варианте выполнения автомобиля, соответствующего изобретению, снабженному силовой установкой, включающей двигатель внутреннего сгорания, электродвигатель с приводным валом и модуль передачи мощности, модуль передачи мощности может включать двухроторный электродвигатель, который имеет первый ротор, соединенный с выходным валом двигателя внутреннего сгорания, и второй ротор, соединенный с приводным валом и способный вращаться относительно первого ротора, при этом двухроторный электродвигатель обеспечивает прием и выдачу мощности, основанной на электроэнергии, на основе электромагнитного действия первого ротора относительно второго ротора.
Способ управления автомобилем, соответствующим изобретению, обеспечивает управление автомобилем, который движется в предварительно заданном направлении движения благодаря мощности, выдаваемой силовой установкой, и включает следующие операции: (а) выявление движения автомобиля назад, в направлении, противоположном предварительно заданному направлению движения; и (b) задание корректирующего крутящего момента, прилагаемого в предварительно заданном направлении движения, и приведение в действие силовой установки и управление ею для приложения корректирующего крутящего момента только как реакции на выявление движения автомобиля назад, в направлении, противоположном предварительно заданному направлению движения, при незадействованном состоянии акселератора.
Способ управления автомобилем, соответствующий изобретению, предусматривает задание корректирующего крутящего момента, прилагаемого в предварительно заданном направлении движения, и приведение в действие силовой установки и управление ею для приложения корректирующего крутящего момента, как реакции на выявление движения автомобиля назад, в направлении, противоположном предварительно заданному направлению движения, при незадействованном состоянии акселератора. Это устройство эффективно регулирует скорость автомобиля, движущегося назад, то есть в направлении скатывания вниз.
Согласно способу управления автомобилем, соответствующему изобретению, в ходе операции (b) может быть выявлен уклон дорожной поверхности и задан корректирующий крутящий момент на основе выявленного уклона дорожной поверхности. Это устройство задает корректирующий крутящий момент на основе уклона дорожной поверхности и таким образом обеспечивает для водителя, по существу, неизменное ощущение вождения независимо от изменений уклона дорожной поверхности.
Способ управления автомобилем, соответствующий изобретению, может дополнительно включать операцию задания крутящего момента с проскальзыванием, прилагаемого в предварительно заданном направлении движения, когда выполнено предварительно заданное условие, перед выполнением операции (b), и в ходе операции (b) может осуществляться приведение в действие силовой установки и управление ею для приложения большего крутящего момента из корректирующего крутящего момента и крутящего момента с проскальзыванием. Это устройство хорошо балансирует обычное управление автомобилем на основе крутящего момента с проскальзыванием и управление автомобилем на основе корректирующего крутящего момента.
Краткое описание чертежей
Фиг.1 - схематический вид конструкции транспортного средства 20 с комбинированной силовой установкой в одном варианте осуществления настоящего изобретения;
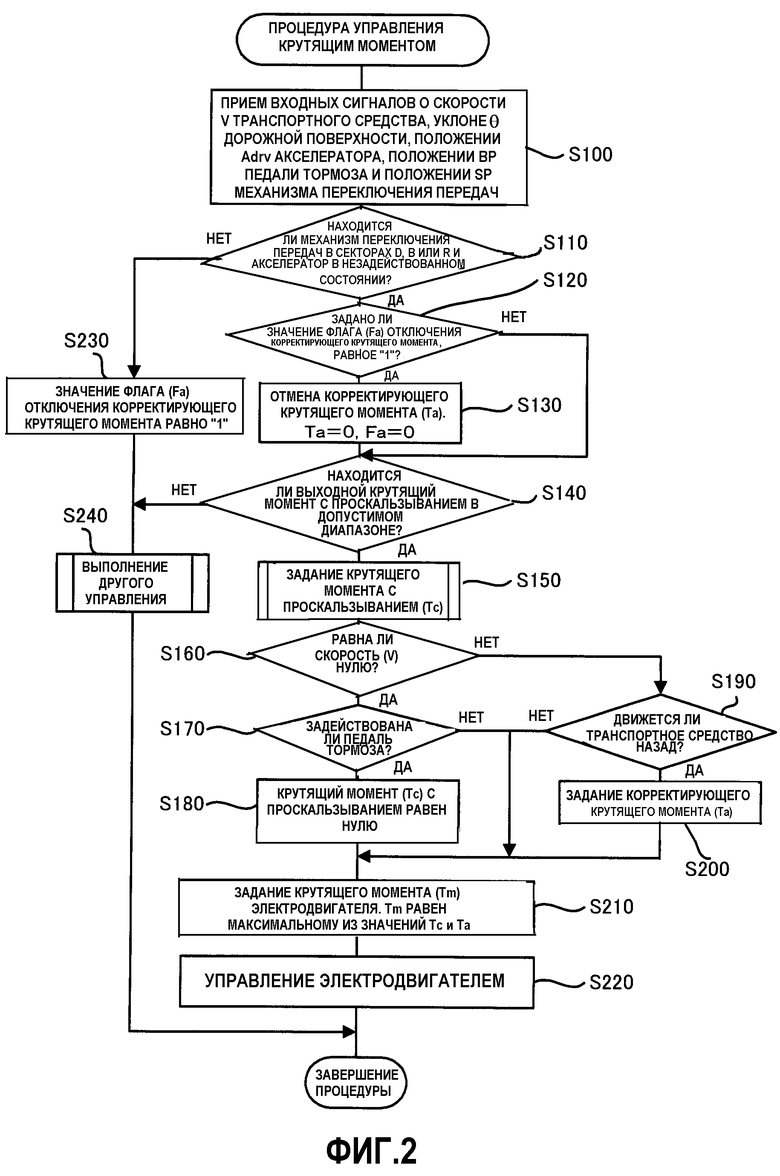
фиг.2 - блок-схема последовательности операций, показывающая процедуру управления крутящим моментом, выполняемую гибридным электронным блоком 70 управления;
фиг.3 - пример карты задания корректирующего крутящего момента;
фиг.4 - схематический вид конструкции транспортного средства 120 с комбинированной силовой установкой в модифицированном варианте осуществления настоящего изобретения.
Предпочтительные варианты осуществления изобретения
Один вариант осуществления настоящего изобретения описан ниже в качестве предпочтительного варианта. На фиг.1 схематически показана конструкция транспортного средства 20 с комбинированной силовой установкой, установленной на нем, в одном варианте осуществления настоящего изобретения. Транспортное средство 20 с комбинированной силовой установкой, соответствующее данному варианту осуществления изобретения, включает двигатель 22, трехвальный интегрирующий механизм 30 распределения мощности, соединенный с коленчатым валом 26 или выходным валом двигателя 22 через демпфер 28, электродвигатель-генератор MG1, соединенный с интегрирующим механизмом 30 распределения мощности для генерирования электроэнергии, другой электродвигатель-генератор MG2, соединенный с интегрирующим механизмом 30 распределения мощности, и гибридный электронный блок 70 управления, который управляет всей системой привода ведущих колес.
Двигатель 22 представляет собой двигатель внутреннего сгорания, который выдает мощность с использованием углеводородного топлива, такого как бензин или дизельное топливо. Электронный блок 24 управления двигателем принимает сигналы от различных датчиков, которые выявляют рабочие условия двигателя 22, и управляет операциями, выполняемыми двигателем 22, включая управление впрыском топлива, управление зажиганием и регулирование впуска воздуха. Электронный блок 24 управления двигателем сообщается с гибридным электронным блоком 70 управления и управляет операциями, выполняемыми двигателем 22, реагируя на сигналы управления, поступающие от гибридного блока 70 управления, при этом он выдает выходные данные, касающиеся условий работы двигателя 22, в гибридный электронный блок 70 управления в соответствии с требованиями.
Интегрирующий механизм 30 распределения мощности включает солнечное зубчатое колесо 31 в качестве зубчатого колеса внешнего зацепления, зубчатый венец 32 в качестве зубчатого колеса внутреннего зацепления, расположенный концентрически относительно солнечного зубчатого колеса 31, множество шестерен 33, входящих в зацепление как с солнечным зубчатым колесом 31, так и с зубчатым венцом 32, и водило 34, удерживающее множество шестерен 33 таким образом, чтобы обеспечивать как круговое вращение, так и их вращение вокруг осей. А именно интегрирующий механизм 30 распределения мощности имеет конструкцию планетарного зубчатого механизма, который совершает дифференциальные действия с солнечным зубчатым колесом 31, зубчатым венцом 32 и водилом 34, как с вращающимися элементами. В интегрирующем механизме 30 распределения мощности коленчатый вал 26 двигателя 22, электродвигатель-генератор MG1 и электродвигатель-генератор MG2 соответственно соединены с водилом 34, солнечным зубчатым колесом 31 и с зубчатым венцом 32. Когда электродвигатель-генератор MG1 работает как электрогенератор, мощность двигателя 22, передаваемая через водило 34, распределяется на солнечное зубчатое колесо 31 и на зубчатый венец 32 в соответствии с их передаточными числами. С другой стороны, когда электродвигатель-генератор MG1 работает как электродвигатель, мощность двигателя 22, передаваемая через водило 34, и мощность электродвигателя-генератора MG1, передаваемая через солнечное зубчатое колесо 31, объединяются и выдаются на зубчатый венец 32. Зубчатый венец 32 механически соединен с передними ведущими колесами 39а и 39b транспортного средства через приводной ремень 36, зубчатый механизм 37 и дифференциальную передачу 38. Выходная мощность, передаваемая зубчатому венцу 32, соответственно передается ведущим колесам 39а и 39b через приводной ремень 36, зубчатый механизм 37 и дифференциальную передачу 38. В приводной системе три вала, соединенные с интегрирующим механизмом 30 распределения мощности, включают выходной вал двигателя 22 или коленчатый вал, соединенный с водилом 34, вращающийся вал электродвигателя-генератора MG1 или вал 31а солнечного зубчатого колеса, соединенный с солнечным колесом 31, и приводной вал или вал 32а зубчатого венца, который соединен с зубчатым венцом 32 и механически соединен с ведущими колесами 39а и 39b. Оба электродвигателя-генератора MG1 и MG2 имеют конструкцию известных синхронных электродвигателей-генераторов, которые приводятся в действие в качестве электрогенератора, а также в качестве электродвигателя. Электродвигатели-генераторы MG1 и MG2 получают электроэнергию от батареи 50 и передают ее в батарею через преобразователи 41 и 42. Линия 54 электропитания, соединяющая преобразователи 41 и 42 с батареей 50, включает положительный вывод и отрицательный вывод, совместно используемые двумя преобразователями 41 и 42. Такое устройство позволяет потреблять электроэнергию, генерируемую одним из электродвигателей-генераторов MG1 и MG2, другим электродвигателем-генератором. Батарея 50 заряжается избыточной электроэнергией электродвигателя-генератора MG1 или электродвигателя-генератора MG2 и разряжается для подачи недостающей электроэнергии электродвигателю-генератору MG1 или электродвигателю-генератору MG2. Батарея 50 не заряжается и не разряжается, когда существует баланс мощностей электродвигателей-генераторов MG1 и MG2. Электродвигатели-генераторы MG1 и MG2 приводятся в действие и управляются электронным блоком 40 управления электродвигателями. Электронный блок 40 управления электродвигателями принимает сигналы, необходимые для приведения в действие и управления электродвигателями-генераторами MG1 и MG2, например сигналы от датчиков 43 и 44 угла поворота, которые определяют углы поворота роторов электродвигателей-генераторов MG1 и MG2 и значения фазных токов, подаваемых к электродвигателям-генераторам MG1 и MG2 и выявляемых непоказанными датчиками тока. Электронный блок 40 управления электродвигателями выдает переключающие сигналы управления для преобразователей 41 и 42. Электронный блок 40 управления электродвигателями вычисляет скорости Nm1 и Nm2 вращения роторов электродвигателей-генераторов MG1 и MG2 на основе сигналов, поступающих от датчиков 43 и 44 угла поворота, в соответствии с процедурой вычисления скорости вращения (не показана). Поскольку электродвигатель-генератор MG1 соединен с солнечным зубчатым колесом 31 и электродвигатель-генератор MG2 соединен с зубчатым венцом 32, скорости Nm1 и Nm2 вращения соответствуют скоростям вращения вала 31а солнечного зубчатого колеса и вала 32а зубчатого венца. Электронный блок 40 управления электродвигателями сообщается с гибридным электронным блоком 70 управления и приводит в действие электродвигатели-генераторы MG1 и MG2 и управляет ими, реагируя на сигналы управления, поступающие от гибридного электронного блока 70 управления, при этом он выдает данные, касающиеся рабочих условий электродвигателей-генераторов MG1 и MG2, в гибридный электронный блок 70 управления в соответствии с требованиями.
Батареей 50 управляет электронный блок 52 управления батареей. Электронный блок 52 управления батареей принимает сигналы, требуемые для управления работой батареи 50, например значение напряжения между клеммами, измеренное датчиком напряжения (не показан), расположенным между клеммами батареи 50, значение тока заряда/разряда, измеренное датчиком тока (не показан), расположенным в линии 54 электропитания, соединенной с выходной клеммой батареи 50, и значение температуры батареи, измеренное датчиком температуры (не показан), установленным на батарее 50. Электронный блок 52 управления работой батареи выдает данные, относящиеся к состоянию батареи 50, в гибридный электронный блок 70 управления по линии соединения в соответствии с требованиями. Электронный блок 52 управления работой батареи вычисляет состояние заряда на основе полученного значения тока заряда/разряда, измеренного датчиком тока, для управления работой батареи 50.
Гибридный электронный блок 70 управления выполнен в форме микропроцессора, включающего центральный процессор 72, постоянное запоминающее устройство 74, которое хранит программы обработки данных, оперативное запоминающее устройство 76, которое временно хранит данные, и порты ввода и вывода и связной порт (не показаны). Гибридный электронный блок 70 управления принимает через порт ввода сигнал зажигания от переключателя 80 зажигания, сигнал SP положения механизма переключения передач от датчика 82 положения механизма переключения передач, который выявляет текущее положение рычага 81 переключения передач, установленное при переключении передач водителем, сигнал Adrv степени нажатия водителем на педаль акселератора, поступающий от датчика 84 положения педали акселератора, который выявляет степень Adrv нажатия водителем на педаль акселератора, соответствующую нажатию водителем на педаль 83 акселератора, сигнал ВР положения педали тормоза, поступающий от датчика 86 положения педали тормоза, который выявляет усилие водителя при нажатии на педаль 85 тормоза, сигнал V скорости транспортного средства, поступающий от датчика 88 скорости транспортного средства, и сигнал θ уклона дорожной поверхности от датчика 90 уклона. Гибридный электронный блок 70 управления соединен с электронным блоком 24 управления двигателем, электронным блоком 40 управления электродвигателями и электронным блоком 52 управления батареей через связной порт, как было указано выше, для приема различных сигналов управления и данных от электронного блока 24 управления двигателем, электронного блока 40 управления электродвигателями и электронного блока 52 управления батареей и выдачи сигналов управления в них.
Транспортное средство 20 с комбинированной силовой установкой в варианте, имеющем описанную выше конструкцию, вычисляет требуемый крутящий момент, который необходимо подавать на вал 32а зубчатого венца или приводной вал на основе скорости V транспортного средства и положения Adrv акселератора, соответствующего степени нажатия водителем на педаль 83 акселератора, и управляет работой двигателя 22 и электродвигателей-генераторов MG1 и MG2 для выдачи требуемой мощности, соответствующей требуемому крутящему моменту, передаваемому на вал зубчатого венца 32а. Существует много режимов управления двигателем 22 и электродвигателями-генераторами MG1 и MG2. В режиме преобразования мощности в крутящий момент двигателем 22 управляют так, чтобы он выдавал мощность, соответствующую требуемой мощности. Электродвигателями-генераторами MG1 и MG2 управляют так, чтобы вся выходная мощность двигателя 22 преобразовывалась в крутящий момент при помощи комбинации интегрирующего механизма 30 распределения мощности и электродвигателей-генераторов MG1 и MG2, и мощность, преобразованная в крутящий момент, выдавалась на вал 32а зубчатого венца. В режиме заряда/разряда двигателем 22 управляют так, чтобы он выдавал мощность, соответствующую сумме требуемой мощности и электроэнергии, необходимой для заряда батареи 50 или выдаваемой батареей 50. Электродвигателями-генераторами MG1 и MG2 управляют так, чтобы вся выходная мощность двигателя 22 или ее часть при заряде или разряде батареи 50 подвергалась преобразованию в крутящий момент при помощи комбинации интегрирующего механизма 30 распределения мощности и электродвигателей-генераторов MG1 и MG2 и на вал 32а зубчатого венца подавалась мощность, соответствующая требуемой мощности. В режиме привода от электродвигателя двигатель 22 выключается, при этом электродвигателем-генератором MG2 управляют так, чтобы он выдавал мощность, соответствующую требуемой мощности, на вал 32а зубчатого венца.
Далее описаны операции, выполняемые транспортным средством 20 с комбинированной силовой установкой, соответствующим настоящему изобретению, в частности серия операций, когда транспортное средство 20 с комбинированной силовой установкой остановлено или в состоянии непосредственно перед остановкой или непосредственно перед возобновлением движения (то есть в состоянии при нажатой педали 85 тормоза для остановки транспортного средства или в состоянии непосредственно перед нажатием на педаль 83 акселератора для возобновления движения транспортного средства). На фиг.2 изображена блок-схема последовательности операций, показывающая процедуру управления крутящим моментом, выполняемую гибридным электронным блоком 70 управления. Эта процедура управления крутящим моментом выполняется многократно с заданными временными интервалами (например, каждые 8 мс).
Когда программа начинает выполнять процедуру управления крутящим моментом, центральный процессор 72 гибридного электронного блока 70 управления сначала считывает необходимые данные для управления, например, о положении SP механизма переключения передач, выявляемого датчиком 81 положения механизма переключения передач, положении Adrv акселератора, выявляемого датчиком 83 положения педали акселератора, положении ВР педали тормоза, выявляемого датчиком 85 положения педали тормоза, скорости V транспортного средства, измеряемой датчиком 88 скорости транспортного средства, и уклоне θ дорожной поверхности, измеряемом датчиком 90 уклона (операция S100). Затем центральный процессор 72 определяет, находится ли в данный момент механизм переключения передач SP в положении, обеспечивающем движение, то есть в любом из секторов D, B и R, и находится ли в данный момент акселератор Adrv в незадействованном положении (операция S110). Когда определено, что в данный момент механизм переключения передач SP не находится в любом из положений, обеспечивающих движение, предполагается, что водитель не намерен в данный момент начинать движение. Когда определено, что положение акселератора Adrv в данный момент представляет задействованное положение, предполагается, что водитель нажал на педаль 83 акселератора для создания крутящего момента, соответствующего степени нажатия водителем на педаль акселератора Adrv. В обоих случаях транспортное средство 20 с комбинированной силовой установкой не находится в искомом состоянии для этого управления крутящим моментом, то есть ни в состоянии остановки, ни в состоянии непосредственно перед остановкой или непосредственно перед возобновлением движения. Центральный процессор 72 соответственно задает значение "1" флагу Fа отключения корректирующего крутящего момента (операция S230) и осуществляет другое управление, например управление крутящим моментом в соответствии с положением Adrv педали акселератора (операция S240) до прекращения этой процедуры управления крутящим моментом.
С другой стороны, когда определено, что текущее положение SP механизма переключения передач соответствует любому положению движения и что текущее положение Adrv педали акселератора представляет состояние незадействованного акселератора, центральный процессор 72 определяет, задано ли значение "1" флагу Fa отключения корректирующего крутящего момента (операция S120). Когда значение флага Fа отключения корректирующего крутящего момента равно "1", центральный процессор 72 задает значение "0" и для корректирующего крутящего момента Та и для флага Fа отключения корректирующего крутящего момента (операция S130). Корректирующий крутящий момент Та будет описан ниже.
Затем центральный процессор 72 определяет, соответствует ли текущее состояние движения транспортного средства допустимому диапазону выходного крутящего момента с проскальзыванием (операция S140). Допустимый диапазон выходного крутящего момента с проскальзыванием задан как требуемый размах выходного крутящего момента с проскальзыванием и устанавливается в соответствии с условиями движения, включая скорость V транспортного средства, положение ВР педали тормоза и давление тормозной жидкости, характеристики электродвигателя-генератора MG2 и ходовые характеристики транспортного средства. Когда текущее состояние движения транспортного средства не соответствует допустимому диапазону выходного крутящего момента с проскальзыванием, центральный процессор 72 определяет отсутствие необходимости в выдаче крутящего момента с проскальзыванием и осуществляет другое управление (операция S240) до прекращения этой процедуры управления крутящим моментом.
С другой стороны, когда текущее состояние движения транспортного средства соответствует допустимому диапазону выходного крутящего момента с проскальзыванием, центральный процессор 72 задает крутящий момент Тс с проскальзыванием (операция S150). Крутящий момент Тс с проскальзыванием может быть задан любым пригодным способом. Один пригодный способ предусматривает умножение установленного уровня крутящего момента на поправочный коэффициент, зависящий от скорости V транспортного средства или давления тормозной жидкости для задания крутящего момента Тс с проскальзыванием. Другой пригодный способ может предусматривать непосредственное задание определенного уровня крутящего момента Тс с проскальзыванием.
Центральный процессор 72 определяет, стоит ли на месте транспортное средство, на основе входного сигнала о скорости V транспортного средства (операция S160). Когда транспортное средство стоит на месте, центральный процессор 72 затем определяет, нажата ли педаль тормоза транспортного средства на основе входного сигнала положения ВР педали тормоза (операция S170). При нажатом положении педали тормоза центральный процессор 72 определяет отсутствие необходимости в создании крутящего момента с проскальзыванием и задает значение "0" крутящего момента Тс с проскальзыванием (операция S180). Когда в ходе операции S160 определено, что транспортное средство не стоит на месте, центральный процессор 72 определяет, движется ли транспортное средство назад, то есть обнаружено ли скатывание транспортного средства вниз на основе положения SP механизма переключения передач (операция S190). Когда транспортное средство движется назад, задается корректирующий крутящий момент Та, соответствующий входному сигналу уклона θ дорожной поверхности (операция S200). Корректирующий крутящий момент Та, так же как и крутящий момент Тс с проскальзыванием, прилагается в ожидаемом направлении движения, то есть вперед при установке SP рычага переключения передач в сектор D и назад при установке SP рычага переключения передач в сектор R. В этом варианте осуществления изобретения изменение корректирующего крутящего момента Та в соответствии с уклоном θ дорожной поверхности устанавливается предварительно и сохраняется в форме карты задания корректирующего крутящего момента в постоянном запоминающем устройстве 74. Корректирующий крутящий момент Та, соответствующий данному уклону θ дорожной поверхности, считывается из карты задания корректирующего крутящего момента. Карта задания корректирующего крутящего момента, используемая в этом варианте осуществления изобретения, задает корректирующий крутящий момент Та, равный требуемому крутящему моменту, для приведения скорости транспортного средства с одним водителем, едущим в нем назад (в направлении скатывания вниз), к предварительному уровню скорости транспортного средства (например, скорости пешехода, составляющей от 1 до 5 км/час) относительно уклона θ дорожной поверхности, равного заданному уровню или меньше него. Карта задания корректирующего крутящего момента задает от крутящего момента, соответствующего уклону θ дорожной поверхности предварительно заданного уровня, до корректирующего крутящего момента Та, соответствующего уклону θ дорожной поверхности, превышающему предварительно заданный уровень. На фиг.3 показан пример карты задания корректирующего крутящего момента. Процедура управления крутящим моментом не задает крутящий момент Тс с проскальзыванием, равный нулю, в состоянии с незадействованной педалью тормоза, даже если транспортное средство стоит на месте. Процедура управления крутящим моментом не выполняет задание корректирующего крутящего момента Та, когда транспортное средство не стоит на месте и не движется назад.
После задания крутящего момента Тс с проскальзыванием и корректирующего крутящего момента Та больший крутящий момент из крутящего момента Тс с проскальзыванием и корректирующего крутящего момента Та задается как крутящий момент Tm электродвигателя, который должен выдавать электродвигатель-генератор MG2 (операция S210). В таком случае осуществляется управление электродвигателем-генератором MG2, который должен выдавать заданное значение крутящего момента Tm электродвигателя (операция S220). На этом процедура управления крутящим моментом завершается.
В одном примере предполагается, что водитель установил рычаг 81 переключения передач в сектор D и отпустил педаль 85 тормоза, когда транспортное средство стоит на месте на восходящем склоне. Корректирующий крутящий момент Та отменяется и сбрасывается на нуль в ходе операции S130. Транспортное средство еще стоит на месте, при этом скорость V транспортного средства равна 0 и оно находится в состоянии незадействованного тормоза непосредственно после того, как водитель отпустил педаль 85 тормоза. Соответственно в ходе операции S150 задается крутящий момент Тс и выдается в качестве крутящего момента Tm электродвигателя от электродвигателя-генератора MG2. В условиях большого уклона θ дорожной поверхности, после того, как водитель отпустил педаль 85 тормоза, выявляется движение транспортного средства назад (назад при установке рычага переключения передач в сектор D), то есть скатывание транспортного средства вниз. В этом случае в ходе операции S200 задается корректирующий крутящий момент Та, соответствующий уклону θ дорожной поверхности. Корректирующий крутящий момент Та выдается как крутящий момент Tm электродвигателя электродвигателем-генератором MG2, когда корректирующий крутящий момент Та превышает крутящий момент Тс с проскальзыванием. Как описано выше, корректирующий крутящий момент Та задан в качестве требуемого крутящего момента для приведения скорости транспортного средства с одним водителем, едущим в нем назад (в направлении скатывания вниз), к предварительно заданному уровню скорости транспортного средства. В условиях, когда уклон θ дорожной поверхности равен предварительно заданному уровню или меньше него, скорость транспортного средства при движении назад приводится к предварительно заданному уровню скорости транспортного средства независимо от изменений уклона θ дорожной поверхности. Процедура, соответствующая данному варианту осуществления изобретения, относится к карте задания корректирующего крутящего момента, предусмотренной для транспортного средства с едущим в нем одним водителем, и для задания корректирующего крутящего момента Та даже в том случае, когда в дополнение к водителю в транспортном средстве находятся один или два пассажира. Соответственно, когда в транспортном средстве в дополнение к водителю находятся один или два пассажира, скорость транспортного средства приводится к немного большему уровню, чем предварительно заданный уровень скорости транспортного средства. Когда водитель нажимает на педаль 83 акселератора, выполняется другая процедура управления крутящим моментом, которая отличается от описанной выше последовательности управления крутящим моментом и основана на положении Adrv акселератора, соответствующем нажиму водителем на педаль 83 акселератора, для обеспечения зависимости работы транспортного средства от нажима водителем на педаль 83 акселератора.
Как описано выше, в транспортном средстве 20 с комбинированной силовой установкой, соответствующем варианту осуществления изобретения, скорость транспортного средства при движении назад, в направлении, противоположном ожидаемому направлению движения, эффективно приводится к предварительно заданному уровню скорости транспортного средства, когда водитель манипулирует рычагом 81 переключения передач и отпускает педаль 85 тормоза для возобновления движения транспортного средства. Корректирующий крутящий момент Та, используемый для этого приведения, задается в соответствии с уклоном θ дорожной поверхности. Это устройство обеспечивает для водителя, по существу, неизменное ощущение при вождении независимо от изменений уклона дорожной поверхности.
В транспортном средстве 20 с комбинированной силовой установкой, соответствующем варианту осуществления изобретения, когда транспортное средство стоит на месте, скорость V транспортного средства равна 0, и оно находится в состоянии с незадействованной педалью тормоза, крутящий момент Тс с проскальзыванием, заданный в ходе операции S150, выдается как крутящий момент Tm электродвигателя от электродвигателя-генератора MG2. Одна модифицированная процедура может задавать или крутящий момент Тс с проскальзыванием или корректирующий крутящий момент Та как исходный крутящий момент, соответствующий уклону θ дорожной поверхности, и может выдавать исходный крутящий момент как крутящий момент Tm электродвигателя от электродвигателя-генератора MG2, когда транспортное средство стоит на месте, скорость V транспортного средства равна 0, и оно находится в состоянии с незадействованной педалью тормоза. Это устройство эффективно сдерживает непреднамеренное скатывание транспортного средства вниз.
В транспортном средстве 20, соответствующем варианту осуществления изобретения, процедура управления крутящим моментом задает крутящий момент Тс с проскальзыванием и корректирующий крутящий момент Та и задает больший крутящий момент из крутящего момента Тс с проскальзыванием и корректирующего крутящего момента Та как крутящий момент Tm электродвигателя, выдаваемый электродвигателем-генератором MG2. Одна модифицированная процедура может задавать сумму крутящего момента Тс с проскальзыванием и корректирующего крутящего момента Tm как крутящий момент Tm электродвигателя, выдаваемый электродвигателем-генератором MG2. Другая модифицированная процедура может не задавать крутящий момент Тс с проскальзыванием, но задает корректирующий крутящий момент Та как крутящий момент Tm электродвигателя, выдаваемый электродвигателем-генератором MG2. В последней модификации без задания крутящего момента Тс с проскальзыванием электродвигатель-генератор MG2 не выдает крутящий момент в состоянии с незадействованной педалью тормоза, когда транспортное средство стоит на месте на горизонтальной дорожной поверхности.
Транспортное средство 20 с комбинированной силовой установкой, соответствующее варианту осуществления изобретения, задает корректирующий крутящий момент Та, соответствующий уклону θ дорожной поверхности, измеренному датчиком 90 уклона. Одна модифицированная процедура может оценивать уклон θ дорожной поверхности на основе соотношения между ускорением транспортного средства и выходным крутящим моментом от двигателя 22, интегрирующего механизма 30 распределения мощности и электродвигателей-генераторов MG1 и MG2 как силовой установки, при движении транспортного средства или в состоянии остановки, и задавать корректирующий крутящий момент Та, соответствующий оценочному уклону θ дорожной поверхности.
Транспортное средство 20 с комбинированной силовой установкой в данном варианте осуществления изобретения использует карту задания корректирующего крутящего момента для задания корректирующего крутящего момента Та. Карта задания корректирующего крутящего момента представляет изменение корректирующего крутящего момента Та относительно уклона θ дорожной поверхности в качестве крутящего момента, требуемого для приведения скорости транспортного средства с одним водителем, едущим в нем назад (в направлении скатывания вниз), к предварительно заданному уровню скорости транспортного средства. Корректирующий крутящий момент Та может быть задан в соответствии с любой другой картой, представляющей соотношение между корректирующим крутящим моментом Та и уклоном θ дорожной поверхности.
Транспортное средство 20 с комбинированной силовой установкой в данном варианте осуществления изобретения использует карту задания корректирующего крутящего момента для задания корректирующего крутящего момента Та. Карта задания корректирующего крутящего момента представляет изменение корректирующего крутящего момента Та относительно уклона θ дорожной поверхности в качестве крутящего момента, требуемого для приведения скорости транспортного средства с одним водителем, едущим в нем назад (в направлении скатывания вниз), к предварительно заданному уровню скорости транспортного средства на основе режима работы транспортного средства (например, скорости и ускорения). Согласно одной модифицированной процедуре, может быть принято управление с обратной связью для задания корректирующего крутящего момента Та для приведения скорости транспортного средства к предварительно заданному уровню скорости транспортного средства.
Указанный выше вариант осуществления изобретения относится к транспортному средству 20 с комбинированной силовой установкой, имеющему установленные на нем двигатель 22, интегрирующий механизм 30 распределения мощности и электродвигатели-генераторы MG1 и MG2. Способ, соответствующий изобретению, применим в отношении транспортного средства любой конструкции, если транспортное средство приводится в движение мощностью, задаваемой положением Adrv акселератора, соответствующим нажиму водителем на педаль 83 акселератора. Например, способ, соответствующий изобретению, применим в отношении транспортного средства 120 с комбинированной силовой установкой, имеющего модифицированную конструкцию, показанную на фиг.4. Транспортное средство 120 с комбинированной силовой установкой включает электродвигатель 130, который имеет внутренний ротор 132, соединенный с коленчатым валом 126 двигателя 122, и внешний ротор 134, прикрепленный к приводному валу 152, соединенному с ведущими колесами 159а и 159b, и вращающийся благодаря электромагнитному действию внутреннего ротора 132 относительно внешнего ротора 134, и другой электродвигатель 140, который может непосредственно выдавать мощность на приводной вал 152. Способ, соответствующий изобретению, также применим в отношении электромобиля более простой конструкции, имеющего электродвигатель, использующий подаваемую электроэнергию от батареи для выдачи тягового усилия.
Приведенные выше варианты осуществления изобретения следует рассматривать во всех их аспектах как иллюстративные и не вносящие ограничений. Может быть осуществлено много модификаций, изменений и альтернатив без отхода от объема или сущности основных отличительных признаков настоящего изобретения. Поэтому все изменения в пределах сущности и диапазона эквивалентности формулы изобретения рассматриваются как охватываемые ею.
Промышленное применение
Способ, соответствующий изобретению, пригоден для автомобильной промышленности.


Группа изобретений касается автомобиля с силовой установкой, а также способа управления таким автомобилем. Когда автомобиль движется назад, в направлении, противоположном ожидаемому направлению движения в соответствии с текущим заданием положения SP механизма переключения передач, задается корректирующий крутящий момент Та, соответствующий измеренному уклону θ дорожной поверхности. Момент Та задается в качестве требуемого крутящего момента для приведения скорости автомобиля с одним водителем, едущим в нем назад, т.е. в направлении скатывания вниз, к предварительно заданному уровню скорости автомобиля. Затем производится сравнение заданного корректирующего крутящего момента Та с крутящим моментом Tс, обеспечивающим медленное движение, который задан в состоянии движения автомобиля в пределах допустимого диапазона выходного крутящего момента Tс. Больший из этих крутящих моментов принимается в качестве крутящего момента Tm от электродвигателя. Группа изобретений позволяет эффективно регулировать скорость движения автомобиля, движущегося назад, в направлении, противоположном ожидаемому направлению движения, с приведением ее к предварительно заданному уровню скорости автомобиля. 2 н. и 13 з.п. ф-лы, 4 ил.
модуль задания направления движения, который предварительно задает направление движения автомобиля,
модуль выявления движения назад, который выявляет движение автомобиля назад, в направлении, противоположном предварительно заданному направлению движения,
модуль задания корректирующего крутящего момента, который задает корректирующий крутящий момент Та, прилагаемый в предварительно заданном направлении движения, как реакцию на задание направления движения модулем задания направления движения и выявление противоположного направления движения модулем выявления движения назад, когда имеет место движение автомобиля в обратном направлении, противоположном предварительно заданному направлению движения, при незадействованном состоянии акселератора вне зависимости от выявления модулем выявления движения назад задействованного или незадействованного состояния тормоза,
модуль задания крутящего момента, обеспечивающего медленное движение, который при состоянии, когда автомобиль стоит на месте, устанавливает величину «0» момента Тc как реакцию на задание направления движения модулем задания направления движения и выявление модулем выявления движения назад состояния, когда автомобиль стоит на месте с задействованным тормозом,
модуль управления движением, который приводит в действие силовую установку и управляет ею для приложения корректирующего крутящего момента Та как реакцию на выявление обратного направления движения, в то же время приводя в действие силовую установку и управляя ею для приложения крутящего момента Тc, равного «0» и соответствующего состоянию, когда автомобиль стоит на месте, как реакцию на состояние, когда автомобиль стоит на месте с задействованным тормозом.
модуль оценки измерения уклона дорожной поверхности, который измеряет или оценивает уклон дорожной поверхности,
причем модуль управления движением задает корректирующий крутящий момент Та на основе измеренного или оцененного уклона дорожной поверхности.
модуль задания исходного крутящего момента, который задает исходный крутящий момент, прилагаемый в предварительно заданном направлении движения, на основе измеренного или оцененного уклона дорожной поверхности,
в котором модуль управления движением приводит в действие силовую установку и управляет ею для приложения исходного крутящего момента в состоянии незадействованной педали тормоза, когда автомобиль стоит на месте.
модуль управления движением задает корректирующий крутящий момент Та для приведения измеренной скорости транспортного средства при движении назад к предварительно заданному уровню скорости транспортного средства.
модуль задания крутящего момента, обеспечивающего медленное движение, задает крутящий момент Тc, обеспечивающий медленное движение, прилагаемый в предварительно заданном направлении движения, когда удовлетворено условие выдачи крутящего момента, обеспечивающего медленное движение, и
модуль управления движением приводит в действие силовую установку и управляет ею для приложения большего крутящего момента из корректирующего крутящего момента Та и крутящего момента Тc, обеспечивающего медленное движение.
модуль приема/выдачи мощности трехвального типа, который соединен с выходным валом двигателя внутреннего сгорания, приводным валом и вращающимся валом и принимает мощность от одного третьего вала и выдает мощность на него в соответствии с мощностью, принимаемой от любых двух валов из трех валов, и мощностью, выдаваемой на них, и электродвигатель с вращающимся валом, который принимает мощность от вращающегося вала и выдает мощность на него.
(a) выявление движения автомобиля назад в направлении, противоположном предварительно заданному направлению движения, и
(b) задание корректирующего крутящего момента Та, прилагаемого в предварительно заданном направлении движения, и приведение в действие силовой установки и управление ею для приложения корректирующего крутящего момента Та как реакции на выявление движения назад в направлении, противоположном предварительно заданному направлению движения, при незадействованном состоянии акселератора вне зависимости от задействованного или незадействованного состояния тормоза, в то же время устанавливая величину «0» крутящего момента Тc, обеспечивающего медленное движение, при состоянии, когда автомобиль стоит на месте, и приводя в действие силовую установку и управляя ею для приложения равного 0 крутящего момента Тc, соответствующего состоянию, когда автомобиль стоит на месте, как реакцию на состояние, когда автомобиль стоит на месте с задействованным тормозом.
в котором в ходе операции (b) приводят в действие силовую установку и управляют ею для приложения большего крутящего момента из корректирующего крутящего момента Та и крутящего момента Тc, обеспечивающего медленное движение.
| JP 2001239853, 04.09.2001 | |||
| JP 7087622, 31.03.1995 | |||
| DE 10049567 A1, 31.01.2001 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ПРЕОДОЛЕНИЯ ИМ ЛЕСТНИЧНЫХ МАРШЕЙ (ВАРИАНТЫ) | 2000 |
|
RU2200526C2 |

