Изобретение относится к области планирования (построения) траекторий высокоскоростных беспилотных летательных аппаратов (ВБЛА) при решении задачи обеспечения преодоления ВБЛА зон поражения противоракетной и (или) противовоздушной обороны (зон ПРО-ПВО).
Известен «Способ адаптивно-маршрутного управления летательным аппаратом» (ЛА) (патент RU №2568161 [1]) для снижения вероятности поражения ЛА в априорно известных зонах возможного поражения зенитно-ракетными средствами (ПВО) за счет их обхода.
Недостатком данного способа является то, что планирование траектории ЛА в обход зон ПВО увеличивает, как правило, время и дальность полета за счет нескольких необходимых обходных маневров, что в этом способе не учитывается. Кроме того, расположение зон ПВО может меняться, в том числе - в процессе полета ЛА (особенно применительно к мобильным комплексам ПВО), что может повысить продолжительность полета и дополнительно уменьшить характеристическую скорость.
Известны способы снижения эффективности средств ПВО путем использования маневров ЛА для срыва режима наведения и увеличения промаха зенитных управляемых ракет (ЗУР). Так, одним из таких способов является способ использования горизонтального маневра беспилотного ЛА (БЛА) с целью нарушения устойчивости самонаведения и увеличения промаха управляемого средства поражения (УСП) (ракеты) на ЛА для заданных условий сближения этих объектов («Способ уклонения ЛА от управляемых средств поражения». Заявка на изобретение №2002124531/11 от 16.09.2002. В64С 13/18, F44B 15/01, G05D 1/08, G05D 1/10) [2].
Недостатком данного способа является то, что его реализация по заявке затруднена ввиду необходимости оперативного обнаружения старта ЗУР, выявления ее типа, а также цели, обстрел которой ведется в данный момент, и расчета параметров уклонения. Кроме того, требования к маневру уклонения от ЗУР в этих условиях по ускорению и его длительности не всегда могут быть выполнены ЛА, тем более - пилотируемым ЛА.
Известен также «Способ уменьшения вероятности поражения ЛА средствами ПВО» (заявка на изобретение №95101418/02 от 25.01.1995. F41H 13/00) [3] путем реализации специального маневра, исключающего возможность экстраполяции параметров траектории ЛА. Предложенный маневр представляет собой траекторию, объединяющую в себе совокупность взаимно перемещающихся в узлах восьмерок, при этом ЛА совершает полет по виткам спирали в плоскости, перпендикулярной направлению полета. Переход с одной восьмерки на другую осуществляется случайным образом.
Недостатком данного способа является ограничение направления витков спирали плоскостью, перпендикулярной направлению полета, что практически не снижает точность экстраполяции траектории полета. Также недостатком является отсутствие требований к качественным параметрам витков, что при слишком большом радиусе витка может позволить обеспечить системе поражения летательных аппаратов точность экстраполяции траектории ЛА, достаточную для наведения на ЛА соответствующих средств поражения, а при слишком малом радиусе витка такой маневр может не мешать поражению ЛА средствами непрямого поражения.
Известен также комплексный способ снижения уязвимости ВБЛА. Он так же, как и способ по патенту RU №2568161 [1], предполагает для снижения вероятности поражения ВБЛА обход летательным аппаратом априорно известных зон ПРО-ПВО. Внутри же зон ПРО-ПВО, если не удается спланировать их обход полностью, предлагается маневрирование в виде одного из нескольких стандартных маневров, в том числе, и в соответствии с заявкой №95101418/02 [3], которые, предположительно, не должны позволить произвести целеуказание противоракеты (ПР) на ВБЛА или выход УСП ПР на режим самонаведения на ВБЛА.
Недостатками данного способа являются, во-первых, недостатки, связанные с обходом зон ПРО-ПВО, а именно: увеличение времени и дальности полета за счет маневров обхода, непредсказуемость координат зон ПРО-ПВО применительно к их мобильным комплексам. Во-вторых, это недостатки, связанные с маневрированием ЛА в зоне ПРО-ПВО, а именно: отсутствие качественных требований к параметрам маневрирования (время начала и конца маневрирования, количество отдельных маневров и требования к маневрам по перегрузкам и длительности), что не позволяет в целом (качественно) определить возможность уменьшения вследствие таких действий уязвимости ВБЛА. Параметры возможных маневров при этом не связаны с параметрами систем ПРО-ПВО по целеуказанию на объект поражения и параметрами УСП по самонаведению и уничтожению ВБЛА в дуэльной ситуации.
Известен также «Способ обеспечения преодоления ВБЛА зон поражения ПРО-ПВО» (заявка №2020108067) [4], предполагающий для обеспечения преодоления ВБЛА зоны поражения обход зоны путем маневрирования с целью смены эшелона полета и проход ниже или выше зоны поражения.
Недостатком данного способа является то, что, во-первых, планирование траектории ЛА в обход зоны ПРО-ПВО увеличивает, как правило, время и дальность полета за счет нескольких необходимых обходных маневров. Во-вторых, расположение зоны ПРО-ПВО может меняться, в том числе - в процессе полета ЛА (особенно применительно к мобильным комплексам ПВО), что может повысить продолжительность полета и дополнительно уменьшить характеристическую скорость. Также, применительно к смене эшелона, проход снизу или сверху зоны поражения может быть нереализуем технически, или вызвать, при проходе снизу, повышенную потерю характеристической скорости вследствие повышения плотности воздуха.
Известен также «Способ планирования труднопрогнозируемых и малоуязвимых траекторий ВБЛА на участке маневрирования» (патент №2634659) [5], заключающийся в применении при проходе зоны поражения так называемых КВРМ (критическое время-расстояние маневра)-траекторий, когда в такой зоне планируют траекторию обязательного маневрирования, включающую последовательность отдельных участков маневрирования, длительность каждого из которых не должна превышать критического времени маневра, равного минимальному из времен целеуказания на высокоскоростной беспилотный летательный аппарат от радиолокационных станций систем противоракетной и (или) противовоздушной обороны и системы самонаведения управляемых средств поражения высокоскоростного беспилотного летательного аппарата этих систем, а расстояние между линией вектора скорости высокоскоростного беспилотного летательного аппарата в начале маневра и точкой его местонахождения в конце маневра должно быть не менее критического расстояния ухода высокоскоростного беспилотного летательного аппарата, равного минимальному расстоянию, которое не может компенсировать управляемое средство поражения в случае его самонаведения на высокоскоростной беспилотный летательный аппарат за критическое время маневра высокоскоростного беспилотного летательного аппарата, направление отдельных маневров выбирается стохастически в пространственных границах, которые определяются требуемым временем достижения цели и запасом характеристической скорости высокоскоростного беспилотного летательного аппарата.
Недостатком этого способа является то, что он является достаточно энергозатратным, и при наличии кортежа зон ПРО-ПВО, значения показателей полета, а именно: потеря характеристической скорости ВБЛА и, соответственно, скорость к конечному участку полета (КУП), время полета к цели, - могут не удовлетворять критериальным требованиям.
Для гарантированного преодоления ВБЛА зон ПВО-ПРО, надо связать пространственное положение всех возможных при планировании полета ВБЛА зон поражения ПРО-ПВО, временные и дистанционные (величина пролета) параметры маневрирования ВБЛА с временными возможностями РЛС систем ПРО-ПВО и УСП по наведению на маневрирующую цель, показатели полета ВБЛА к конечному участку полета (скорость, время) и заданные требования к ним.
Задачей предлагаемого изобретения является создание способа преодоления ВБЛА зон ПРО-ПВО.
Техническим результатом предлагаемого способа являются варианты гарантированного преодоления ВБЛА зон поражения ПРО-ПВО с показателями полета к конечному участку полета, удовлетворяющими заданным условиям.
Поставленная цель достигается тем, что при преодоления ВБЛА отдельной зоны ПВО-ПРО применяются следующие способы маневрирования:
1) Способ 1 - известный ранее способ обхода зоны поражения ПРО-ПВО по плоской (горизонтальной) траектории полета [1].
2) Способ 2 - предложенный ранее проход через зону поражения ПВО-ПРО способом маневрирования ВБЛА с заданными параметрами (параметры определяются исходя из способа КВРМ-траекторий - критическое время и (или) радиус кривизны маневра) [5];
3) Способ 3 - способ обхода зоны поражения ПРО-ПВО путем маневрирования ВБЛА с целью смены эшелона полета и проход ВБЛА ниже или выше зоны поражения [4].
При любых способах маневрирования производится оценка потери характеристической скорости ВБЛА при прохождении каждой зоны поражения и общая оценка потери характеристической скорости - с учетом прохождения всех зон ПРО-ПВО к конечному участку полета (КУП), а также производится оценка времени на прохождение каждой зоны поражения и общая оценка времени полета ВБЛА - с учетом прохождения всех зон ПРО-ПВО к КУП.
Требуется найти варианты преодоления ВБЛА зон эшелонированной ПРО-ПВО, обеспечивающие преодоление зон поражения с заданными условиями:
с граничным условием по величине оставшейся к КУП с учетом преодолением всех зон ПРО-ПВО характеристической скорости ВБЛА, Vкуп, не меньше требуемой: Vкуп≥(Vкуп)тр, либо, если такое ограничение удовлетворено, то с наибольшей характеристической скоростью: Vкуп→max при Vкуп≥(Vкуп)тр;
с граничным условием по величине суммарного времени полета к КУП с учетом преодоления всех зон ПРО-ПВО, Тп, не больше требуемого: Тп≤(Тп)тр, либо, если такое ограничение удовлетворено, то с наименьшим временем прохождения: Тп→min при Тп≤(Тп)тр.
Варианты преодоления ВБЛА всех зон ПРО-ПВО противника составляют совокупность вариантов преодоления ПРО-ПВО.
Рациональными вариантами являются те, которые при преодолении ВБЛА всех зон поражения ПРО-ПВО удовлетворяют заданным условиям.
Оптимальным вариантом из рациональных вариантов является тот, который, с учетом значений показателей полета (характеристической скорости ВБЛА к КУП и времени полета ВБЛА к КУП) и их важности имеет максимальный уровень соответствия задачам ВБЛА по предназначению.
Способ поясняется при помощи чертежа.
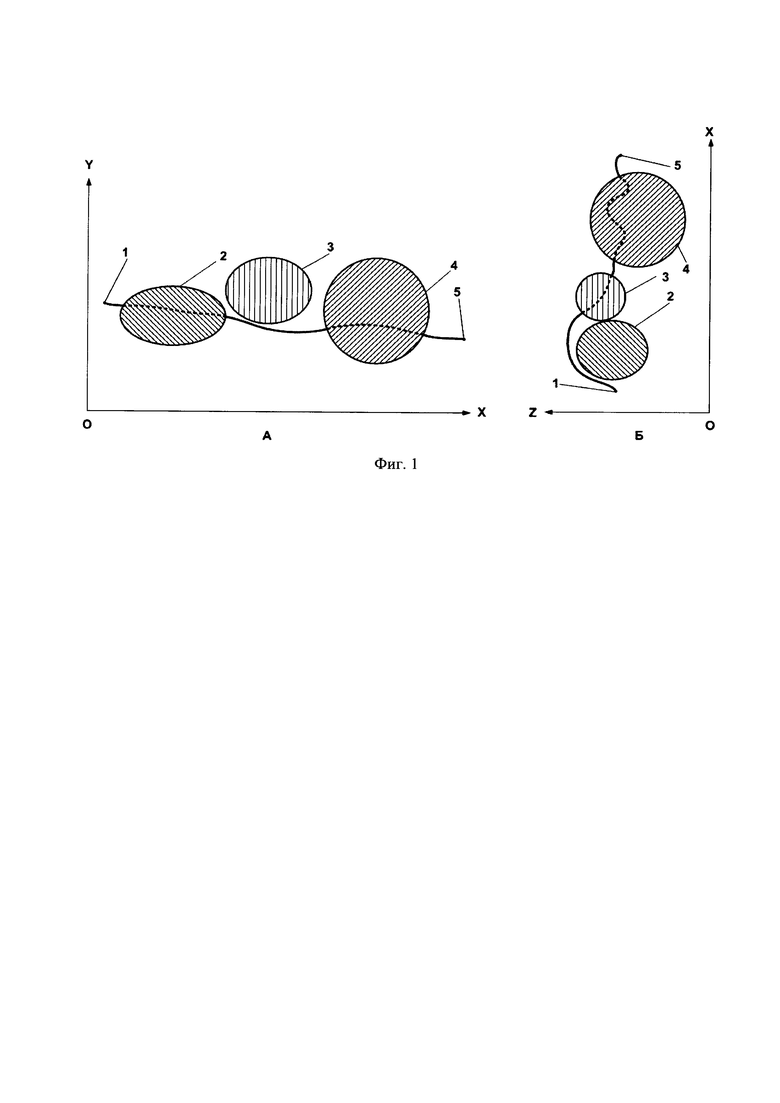
На фиг. 1 показана схема одного из вариантов гарантированного преодоления ВБЛА зон поражения ПРО-ПВО в виде схемы маневрирования ВБЛА при прохождении зон поражения ПРО-ПВО в вертикальной (А) и горизонтальной (Б) плоскостях с использованием указанных в описании способов маневрирования.
Заявленный способ реализуется следующим образом.
Рассматривая систему координат OXYZ, где точка О - точка начала полета летательного аппарата, ось ОХ проходит через точку расположения цели, ось OY лежит в горизонтальной плоскости, а ось OZ - в вертикальной плоскости при планировании траекторий ВБЛА (1) по преодолению зон поражения ПРО-ПВО (2, 3, 4):
в качестве способа преодоления зоны (2) принят способ 1 (обход зоны по плоской (горизонтальной) траектории полета обход слева);
в качестве способа преодоления зоны (3) принят способ 3 (обход зоны поражения путем маневрирования ВБЛА с целью смены эшелона полета и проход ВБЛА ниже зоны поражения);
в качестве способа преодоления зоны (4) принят способ 2 (проход через зону поражения способом маневрирования ВБЛА с заданными параметрами (параметры определяются исходя из способа КВРМ-траекторий - критическое время и (или) радиус кривизны маневра)).
После преодоления зон поражения ПРО-ПВО летательный аппарат подходит к КУП (5) с показателями - характеристической скоростью ВБЛА, Vкуп, к КУП, и временем полета ВБЛА к КУП с учетом преодолением всех зон ПРО-ПВО, Тп.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. RU №2568161.
2. RU №2217353.
3. RU №2095737.
4. Заявка на патент №2020108067.
5. RU №2634659.
Изобретение относится к способу преодоления высокоскоростным беспилотным летательным аппаратом зон поражения противоракетной и (или) противовоздушной обороны. Для преодоления зон поражения выбирают вариант преодоления в зависимости от значений критического времени и (или) радиуса кривизны отдельного маневра либо производят смену эшелона полета выше или ниже зоны поражения. Обеспечивается гарантированное преодоление зон поражения. 1 ил.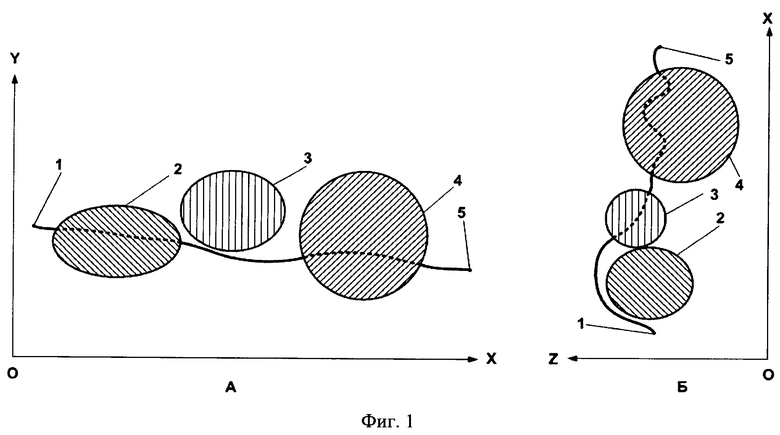
Способ преодоления высокоскоростным беспилотным летательным аппаратом зон поражения противоракетной и (или) противовоздушной обороны, заключающийся в том, что производится выбор варианта преодоления высокоскоростным беспилотным летательным аппаратом зон противоракетной и (или) противовоздушной обороны для преодоления отдельной зоны поражения, при этом в каждом варианте применяется либо способ маневрирования путем обхода зоны поражения по плоской (горизонтальной) траектории полета, либо проход через зону поражения способом маневрирования высокоскоростного беспилотного летательного аппарата с заданными параметрами, при этом параметры определяются исходя из способа использования значений критического времени и (или) радиуса кривизны отдельного маневра, либо способ обхода зоны поражения противоракетной и (или) противовоздушной обороны путем маневрирования высокоскоростного беспилотного летательного аппарата с целью смены эшелона полета и прохода высокоскоростного беспилотного летательного аппарата ниже или выше зоны поражения, при этом каждый вариант оценивается по показателям полета высокоскоростного беспилотного летательного аппарата, а именно: по оставшейся после преодоления зон поражения противоракетной и (или) противовоздушной обороны характеристической скорости высокоскоростного беспилотного летательного аппарата к конечному участку полета и по суммарному времени полета к конечному участку полета с учетом преодоления всех зон противоракетной и (или) противовоздушной обороны, полученные значения показателей полета проверяются на соответствие заданным условиям, при этом если значения показателей полета удовлетворяют заданным условиям, то вариант считается рациональным и применимым, а среди рациональных вариантов определяется оптимальный вариант, который с учетом важности показателей полета, имеет наибольший уровень соответствия высокоскоростного летательного аппарата задачам по предназначению, после выбора варианта преодоления зон поражения противоракетной и (или) противовоздушной обороны высокоскоростной беспилотный летательный аппарат производит полет по выбранному варианту и подходит к конечному участку полета.
| Способ построения маршрута маловысотного полета на виртуальном полигоне | 2018 |
|
RU2696047C1 |
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ С ОБЛЕТОМ ЗОН С НЕБЛАГОПРИЯТНЫМИ МЕТЕОРОЛОГИЧЕСКИМИ УСЛОВИЯМИ | 2011 |
|
RU2490170C2 |
| US 0009513125 B2, 06.12.2016 | |||
| US 0008515593 B2, 20.08.2013 | |||
| WO 2017071143 A1, 04.05.2017. | |||

