Изобретение относится к области задания траекторий высокоскоростных беспилотных летательных аппаратов (ВБЛА).
Известен «Способ адаптивно-маршрутного управления летательным аппаратом» (ЛА) (патент RU №2568161) для снижения вероятности поражения ЛА в априорно известных зонах возможного поражения зенитно-ракетными средствами противовоздушной обороны (ПВО) за счет их обхода.
Недостатком данного способа является то, что обход зон ПВО увеличивает, как правило, время и дальность полета за счет нескольких необходимых обходных маневров. Кроме того, расположение зон ПВО может меняться, в том числе - в процессе полета ЛА (особенно применительно к мобильным комплексам ПВО).
Известны способы снижения эффективности средств ПВО путем использования маневров ЛА для срыва режима наведения и увеличения промаха зенитных управляемых ракет (ЗУР). Так, одним из таких способов является способ использования горизонтального маневра беспилотного ЛА (БЛА) с целью нарушения устойчивости самонаведения и увеличения промаха управляемого средства поражения (УСП) (ракеты) на ЛА для заданных условий сближения этих объектов («Способ уклонения ЛА от управляемых средств поражения». Заявка на изобретение №2002124531/11 от 16.09.2002. В64С 13/18, F44B 15/01, G05D 1/08, G05D 1/10).
Недостатком данного способа является то, что его реализация по заявке затруднена ввиду необходимости оперативного обнаружения старта ЗУР, выявления ее типа, а также цели, обстрел которой ведется в данный момент, и расчета параметров уклонения. Кроме того, требования к маневру уклонения от ЗУР в этих условиях по ускорению и его длительности не всегда могут быть выполнены ЛА, тем более - пилотируемым ЛА.
Известен также «Способ уменьшения вероятности поражения ЛА средствами ПВО» (Заявка на изобретение №95101418/02 от 25.01.1995. F41H 13/00) путем реализации специального маневра, исключающего возможность экстраполяции параметров траектории ЛА. Предложенный маневр представляет собой траекторию, объединяющую в себе совокупность взаимно перемещающихся в узлах восьмерок, при этом ЛА совершает полет по виткам спирали в плоскости, перпендикулярной направлению полета. Переход с одной восьмерки на другую осуществляется случайным образом.
Недостатком данного способа является ограничение направления витков спирали плоскостью, перпендикулярной направлению полета, что практически не снижает точность экстраполяции траектории полета. Также недостатком является отсутствие требований к качественным параметрам витков, что при слишком большом радиусе витка может позволить обеспечить системе поражения ЛА точность экстраполяции траектории ЛА, достаточную для наведения на ЛА соответствующих средств поражения, а при слишком малом радиусе витка такой маневр может не мешать поражению ЛА средствами непрямого поражения.
Известен также комплексный способ снижения уязвимости ВБЛА. Он так же, как и способ по патенту RU №2568161, предполагает для снижения вероятности поражения ВБЛА обход летательным аппаратом априорно известных зон поражения зенитно-ракетных средств ПВО и (или) противоракетной обороны (ПРО) (далее - зон ПРО-ПВО). Внутри же зон ПРО-ПВО, если не удается спланировать их обход полностью, предлагается маневрирование в виде одного из нескольких стандартных маневров, в том числе и в соответствии с заявкой №95101418/02, которые, предположительно, не должны позволить произвести целеуказание противоракеты (ПР) на ВБЛА или выход УСП ПР на режим самонаведения на ВБЛА.
Недостатками данного способа являются, во-первых, недостатки, связанные с обходом зон ПРО-ПВО, а именно: увеличение времени и дальности полета за счет маневров обхода, непредсказуемость координат зон ПРО-ПВО применительно к их мобильным комплексам. Во-вторых, это недостатки, связанные с маневрированием ЛА в зоне ПРО-ПВО, а именно: отсутствие качественных требований к параметрам маневрирования (время начала и конца маневрирования, количество отдельных маневров и требования к маневрам по перегрузкам и длительности), что не позволяет в целом (качественно) определить возможность уменьшения вследствие таких действий уязвимости ВБЛА. Параметры возможных маневров при этом не связаны с параметрами систем ПРО-ПВО и УСП по целеуказанию на объект поражения.
Для обеспечения надежного преодоления зон ПРО-ПВО надо связать временные и дистанционные (величина пролета) параметры маневрирования ВБЛА с временными возможностями РЛС систем ПРО-ПВО и УСП по наведению на маневрирующую цель и с возможностями компенсировать УСП величину возможного пролета.
Техническим результатом предлагаемого способа является задание труднопрогнозируемых и малоуязвимых траекторий ВБЛА в зоне их возможного поражения системами ПРО-ПВО.
Поставленная цель достигается тем, что при задании отдельного маневра ВБЛА соблюдаются предлагаемые новые параметры отдельного маневра, а именно:
1) Критическое время маневра (КВМ), ТКВМ, под которым понимается максимально допустимое время между отдельными маневрами, при соблюдении которого система ПРО-ПВО и УСП не способны произвести (подготовить, рассчитать) целеуказание (ЦУ) на ВБЛА с достаточной для поражения ВБЛА точностью.
КВМ должно быть, соответственно, меньше минимального время целеуказания на ВБЛА от РЛС систем ПРО-ПВО и системы самонаведения УСП.
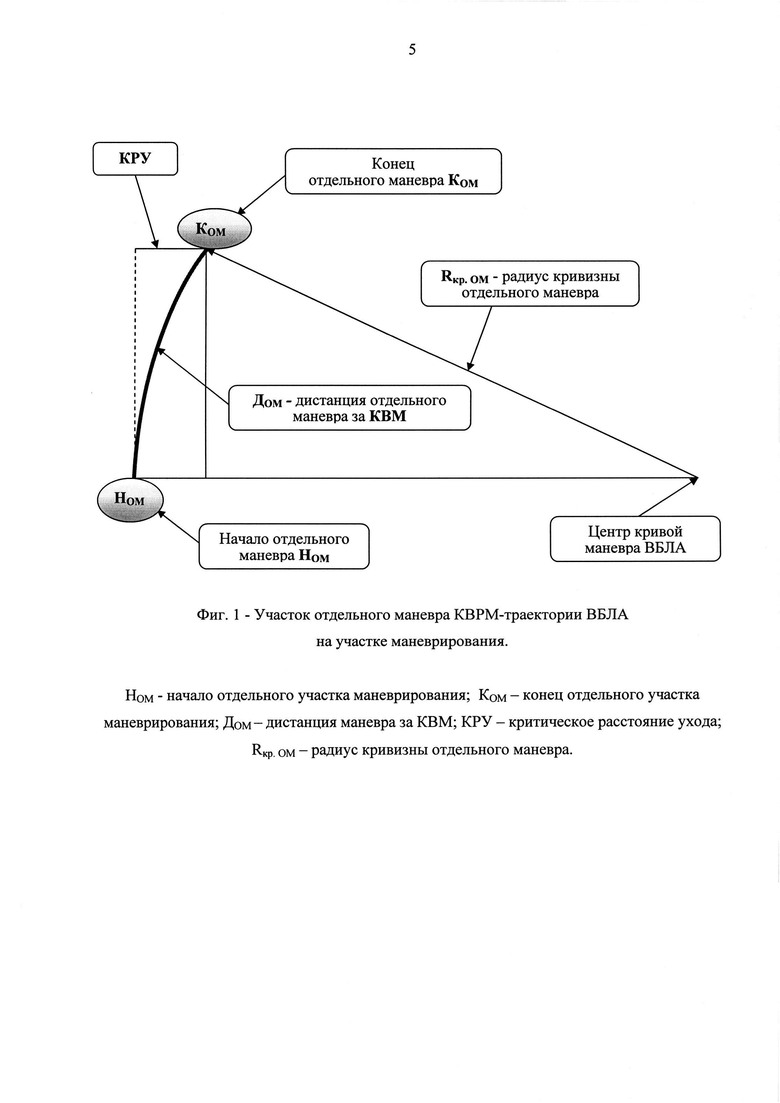
2) Критическое расстояние ухода (КРУ) за КВМ - минимальный «уход» ВБЛА (расстояние между линией вектора скорости ВБЛА в начале маневра и точкой местонахождения ВБЛА в конце маневра), который уже не может компенсировать («выбрать») УСП в случае самонаведения на ВБЛА.
КРУ должно быть, соответственно, больше максимального «пролета» УСП (т.е. больше максимального расстояния между линией вектора скорости УСП и точкой местонахождения ВБЛА в момент начала самонаведения УСП), который УСП сможет компенсировать («выбрать»).
Величина КВМ должна быть определена исходя из наилучших на момент применения ВБЛА характеристик системы ПРО-ПВО по целеуказанию на ВБЛА:

где ТЦУ РЛС, ТЦУ УСП - минимальное время целеуказания на ВБЛА от РЛС систем ПРО-ПВО и системы самонаведения УСП. Величина КРУ за время КВМ:

где Вкомп.пр. УСП - величина пролета УСП, которую оно способно компенсировать («выбрать») при длительности маневра ТМ, равной КВМ.
Поставленная цель достигается также тем, что при задании траекторий ВБЛА соблюдается новый подход к планированию траекторий - КВРМ-подход (критическое время-расстояние маневрирования), суть которого в следующем:
1. Точное месторасположение РЛС системы ПРО-ПВО для задания траекторий ВБЛА не важно, важен район их возможного расположения относительно цели, чтобы задать для ВБЛА свои зоны обязательного маневрирования (ЗОМ).
2. Время между отдельными маневрами должно быть не более КВМ, а количество маневров определяется протяженностью ЗОМ и скоростью ВБЛА.
3. «Уход» ВБЛА при очередном маневре от первоначального направления должен быть не менее КРУ, что определяет требование к кривизне траектории маневра и, соответственно, к перегрузке ВБЛА при маневре.
4. Направление очередного маневра должно быть стохастическим (в определенных пространственных границах).
Требование по КВМ делает траекторию ВБЛА труднопрогнозируемой и малоуязвимой.
Требование по КРУ позволяет достичь неуязвимости ЛА в случае, когда к моменту начала отдельного маневра управляемому средству поражения системы ПРО-ПВО, запущенному в зону возможного нахождения ВБЛА в отсутствии достаточно точного целеуказания, удалось по отношению к ВБЛА перейти на режим самонаведения.
При КВРМ-подходе нет необходимости затрачивать энергию на обходы зон действия ПРО-ПВО, достаточно квазистохастических изменений траектории, обеспечивающих невозможность целеуказания и компенсации пролета УСП при его самонаведении на ЛА.
Траектории, реализующие КВРМ-подход, являются КВРМ-траекториями.
Способ поясняется при помощи чертежа.
На фиг. 1 показан участок отдельного маневра КВРМ-траектории ВБЛА на участке маневрирования.
Заявленный способ реализуется следующим образом.
При задании траекторий ВБЛА на участке маневрирования точное месторасположение РЛС системы ПРО-ПВО не важно, учитывается район их расположения, в котором задается ЗОМ ВБЛА. Частота маневрирования в ЗОМ определяется протяженностью ЗОМ и параметрами отдельного маневра - векторами скорости и ускорения ВБЛА, КВМ и КРУ. Временной интервал между отдельными маневрами составляет не более КВМ. В точке начала отдельного маневра НОМ стохастически выбирается (в определенных пространственных границах, которые определяются требуемым временем достижения цели и запасом характеристической скорости ВБЛА) направление очередного маневра. Параметры движения ВБЛА должны обеспечить выполнение КРУ за КВМ к точке окончания отдельного маневра КОМ.
Таким образом, при использовании заявленного способа достигается труднопрогнозируемость и малоуязвимость траекторий ВБЛА в зоне их возможного поражения, т.е., практически, инвариантность ВБЛА к воздействию систем ПРО-ПВО.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ маневрирования высокоскоростного беспилотного летательного аппарата в зоне возможного действия средств противоракетной и противовоздушной обороны | 2016 |
|
RU2635022C1 |
| СПОСОБ ПРЕОДОЛЕНИЯ ВЫСОКОСКОРОСТНЫМ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ (ВБЛА) ЗОН ПОРАЖЕНИЯ ПРОТИВОРАКЕТНОЙ И (ИЛИ) ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ | 2020 |
|
RU2730083C1 |
| Способ построения траекторий высокоскоростных беспилотных летательных аппаратов в зоне размещения средств противодействия | 2018 |
|
RU2726512C2 |
| СПОСОБ УМЕНЬШЕНИЯ ВЕРОЯТНОСТИ ПОРАЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА СРЕДСТВАМИ ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ | 1995 |
|
RU2095737C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ЗАЛПОМ АТМОСФЕРНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2691233C2 |
| ТЕРМОБАРИЧЕСКИЙ СПОСОБ БОРЬБЫ С РОЕМ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2733600C1 |
| СПОСОБ БОКОВОЙ СТРЕЛЬБЫ ОГНЕВЫМИ СРЕДСТВАМИ ПОРАЖЕНИЯ ЦЕЛЕЙ С ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2740828C1 |
| Устройство радиоэлектронного подавления беспилотных летательных аппаратов в зенитно-ракетном комплексе ближнего действия | 2023 |
|
RU2820537C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА ПО ТРУДНОПРЕДСКАЗУЕМОЙ И МАЛОУЯЗВИМОЙ ТРАЕКТОРИИ В ЗОНЕ ВОЗМОЖНОГО ПОРАЖЕНИЯ УПРАВЛЯЕМЫМИ СНАРЯДАМИ, А ТАКЖЕ ЛЕТАТЕЛЬНЫЙ АППАРАТ, НЕОБХОДИМЫЙ ДЛЯ ОСУЩЕСТВЛЕНИЯ ДАННОГО СПОСОБА | 2018 |
|
RU2689065C1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ СИГНАЛОВ ВКЛЮЧЕНИЯ ДВИГАТЕЛЬНОЙ УСТАНОВКИ КОСМИЧЕСКОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ВЫПОЛНЕНИИ ИМ ПРОСТРАНСТВЕННОГО МАНЕВРА НА БАЛЛИСТИЧЕСКОМ УЧАСТКЕ ТРАЕКТОРИИ ПОЛЕТА | 2015 |
|
RU2581791C1 |
Изобретение относится к способу маневрирования высокоскоростного беспилотного летательного аппарата (ВБЛА) в зоне действия противоракетной и противовоздушной обороны. Для осуществления способа задают траекторию обязательного маневрирования в виде последовательности отдельных участков, соответствующих определенной длительности, определенному расстоянию и направлению ухода ВБЛА от поражения, вычисленному определенным образом. Обеспечивается труднопрогнозируемость и малоуязвимость траекторий ВБЛА в зоне их возможного поражения средствами противоракетной и противовоздушной обороны. 1 ил.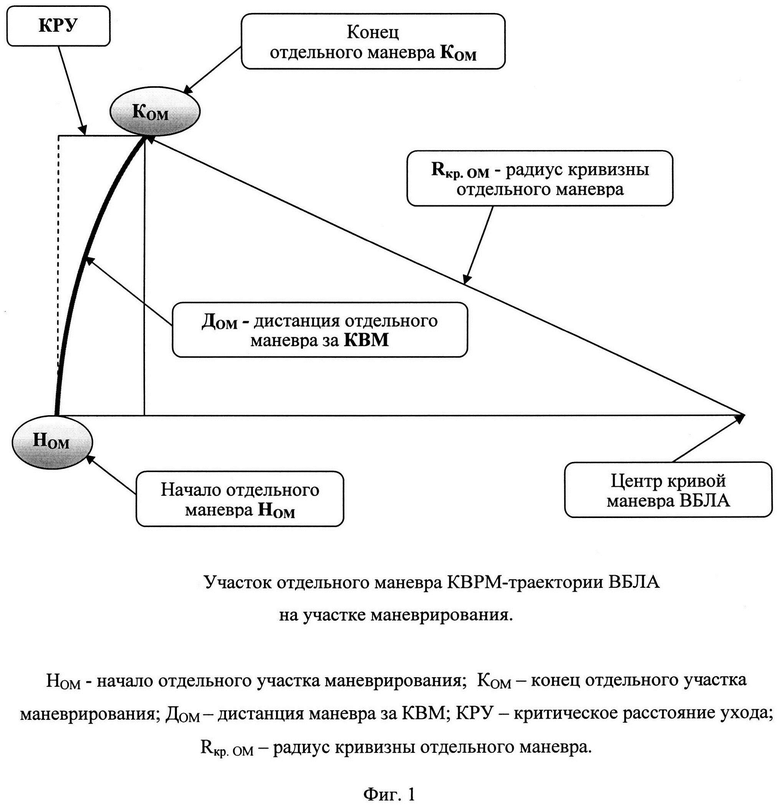
Способ маневрирования высокоскоростного беспилотного летательного аппарата в зоне возможного действия средств противоракетной и противовоздушной обороны, заключающийся в том, что в такой зоне задают траекторию обязательного маневрирования, включающую последовательность отдельных участков маневрирования, длительность каждого из которых не должна превышать критического времени маневра, равного максимально допустимому времени маневра, при котором невозможно целеуказание на высокоскоростной беспилотный летательный аппарат от радиолокационных станций систем противоракетной и (или) противовоздушной обороны и системы самонаведения управляемого средства поражения этих систем, а расстояние между линией вектора скорости высокоскоростного беспилотного летательного аппарата в начале маневра и точкой его местонахождения в конце маневра должно быть не менее критического расстояния ухода высокоскоростного беспилотного летательного аппарата, равного минимальному расстоянию, которое не может компенсировать управляемое средство поражения в случае его самонаведения на высокоскоростной беспилотный летательный аппарат за критическое время маневра высокоскоростного беспилотного летательного аппарата, направление отдельных маневров выбирается стохастически в пространственных границах, которые определяются требуемым временем достижения цели и запасом характеристической скорости высокоскоростного беспилотного летательного аппарата.
| СПОСОБ ПОВЫШЕНИЯ ЖИВУЧЕСТИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, ПРЕОДОЛЕВАЮЩИХ ЗОНЫ РАДИОТЕХНИЧЕСКОГО ПРОТИВОДЕЙСТВИЯ И АКТИВНОГО ПОРАЖЕНИЯ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2364824C2 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТНЫМ ВОЗДУШНЫМ ОБЪЕКТОМ В ЗОНЕ ОПАСНОСТИ ПОРАЖЕНИЯ | 1999 |
|
RU2158697C1 |
| СПОСОБ УКЛОНЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ОТ УПРАВЛЯЕМЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2002 |
|
RU2217353C1 |
| СПОСОБ УМЕНЬШЕНИЯ ВЕРОЯТНОСТИ ПОРАЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА СРЕДСТВАМИ ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ | 1995 |
|
RU2095737C1 |
| Устройство для получения напряжения или тока, пропорционального произведению двух электрических величин | 1949 |
|
SU105882A2 |

